

Summary
Этот метод направлен на обнаружение вертикальных дефектов подповерхностного слоя. Здесь мы соединяем лазер с пространственным модуляторами света и запускаем его видеовход, чтобы детерминировать нагрев образца поверхности с помощью двух антифазированных модулированных линий при получении высоко разрешенных тепловизионных изображений. Положение дефекта извлекается из оценки минимумов помех тепловых волн.
Abstract
Представленный метод используется для обнаружения дефектов подповерхностного слоя, ориентированных перпендикулярно поверхности. Для этого мы создаем деструктивно мешающие тепловые волновые поля, которые нарушаются дефектом. Этот эффект измеряется и используется для обнаружения дефекта. Мы формируем деструктивно интерферирующие волновые поля, используя модифицированный проектор. Оригинальный световой двигатель проектора заменен волоконно-связанным мощным диодным лазером. Его луч сформирован и выровнен по отношению к пространственному модуляторному модулю проектора и оптимизирован для оптимальной оптической пропускной способности и однородной проекции, сначала характеризуя профиль балки, и, во-вторых, корректируя его механически и численно. Высокопроизводительная инфракрасная камера устанавливается в соответствии с жесткой геометрической ситуацией (включая исправления геометрических искажений изображения) и требованием обнаружения слабых колебаний температуры на поверхности образца. Сбор данных может быть выполнен один раз при синхронизацииРонизация между отдельными источниками поля тепловых волн, стадией сканирования и ИК-камерой устанавливается с использованием специальной экспериментальной установки, которая должна быть настроена на конкретный исследуемый материал. Во время пост-обработки данных извлекается соответствующая информация о наличии дефекта ниже поверхности образца. Он извлекается из осциллирующей части полученного теплового излучения, идущего от так называемой линии обеднения поверхности образца. Точное местоположение дефекта выводится из анализа пространственно-временной формы этих колебаний на конечном этапе. Метод не содержит ссылок и очень чувствителен к изменениям в области тепловых волн. До сих пор метод был испытан стальными образцами, но применим также к различным материалам, в частности к чувствительным к температуре материалам.
Introduction
Метод лазерной проецируемой фототермической термографии (LPPT) используется для обнаружения дефектов подповерхностного слоя, которые встроены в объем испытываемого образца и ориентированы преимущественно перпендикулярно к его поверхности.
Метод использует деструктивную интерференцию двух антифазных тепловых волновых полей с одинаковым удлинением и частотой, как показано на рисунке 1b . В изотропных бездефектных материалах тепловые волны нейтрализуют деструктивно ( т.е. колебание нулевой температуры) в плоскости симметрии когерентной суперпозицией. В случае материала с дефектом подповерхностного слоя метод использует взаимодействие латеральных ( т. Е. В плоскости) компонентов между переходным тепловым потоком и этим дефектом. Это взаимодействие может быть измерено в воссозданном колебательном температурном удлинении на линии симметрии на поверхности образца. Теперь дефект, содержащий образец, сканируется наложенным полем тепловых волн иУровень относительного удлинения температуры измеряется относительно положения образца. Из-за симметрии условие разрушающей интерференции снова выполняется, когда дефект пересекает плоскость симметрии; Это позволяет нам обнаружить дефект очень чувствительно. Кроме того, поскольку уровень максимального нарушения деструктивной помехи коррелирует с глубиной дефекта, можно определить его глубину, проанализировав температурное сканирование 1 .
LPPT может быть назначен активной методологии термографии, хорошо зарекомендовавшим себя неразрушающим методом, когда активно генерируется переходное нагревание, и получаемое, а также временное распределение температуры измеряется с помощью тепловой ИК-камеры. В целом чувствительность этой методики ограничена дефектами, которые ориентированы, по существу, перпендикулярно переходному тепловому потоку. Кроме того, поскольку управляющее переходное уравнение теплопроводности является параболическим частичным дифференцированиемПри этом тепловой поток в объеме сильно затухает. Как следствие, глубина зондирования активной методологии термографии ограничена областью около поверхности, обычно в миллиметровом диапазоне. Двумя наиболее распространенными методами активной термографии являются импульсная и встроенная термография. Они быстрые благодаря плоской оптической поверхности 2 , но приводят к переходному тепловому потоку, перпендикулярному поверхности. Поэтому чувствительность этих методов ограничивается дефектами, преимущественно ориентированными параллельно ( например, расслоениями или пустотами) к нагретой поверхности образца. Эмпирическое правило для импульсной термографии гласит, что «радиус наименьшего обнаруживаемого дефекта должен быть как минимум в 1-2 раза больше его глубины под поверхностью» 3 . Чтобы увеличить эффективную площадь взаимодействия между перпендикулярно ориентированным дефектом ( например , трещиной) и тепловым потоком, направление теплового потока должно бытьизменилось. Локальное возбуждение, например, с использованием сфокусированного лазера с линейным или круговым пятном, генерирует тепловой поток с компонентом в плоскости, который способен эффективно взаимодействовать с перпендикулярным дефектом 4 , 5 , 6 , 7 .
В представленном методе мы также используем компоненты бокового теплового потока для обнаружения дефектов подповерхностного слоя, но мы используем тот факт, что тепловые волны могут быть наложены друг на друга, а дефекты, особенно вертикально ориентированные, нарушают эту суперпозицию. Таким образом, представленный метод напоминает бесповторный, симметричный и очень чувствительный метод, поскольку можно обнаружить искусственные дефекты подповерхностного слоя при отношении ширины / глубины намного ниже одного , 8 . До сих пор было трудно создать два антифазных тепловых волновых поля, обеспечивающих достаточную энергию. Мы достигли этого bY связать пространственный модулятор света (SLM) с мощным диодным лазером, что позволило объединить высокую оптическую мощность лазерной системы с пространственным и временным разрешением SLM (см . Рисунок 2 ) в мощный проектор , Теперь поля тепловых волн создаются фототермическим преобразованием двух антифазированных синусоидально-модулированных линий линий через яркость пикселя проецируемого изображения (см . Рис. 2 , рис. 1a ). Это приводит к структурированному нагреву поверхности образца и приводит к четко определенным деструктивно мешающим тепловым волнам. Чтобы найти дефект подповерхностного слоя, нарушение деструктивного вывода измеряется как колебание температуры на поверхности с помощью ИК-камеры.
Термин термическая волна обсуждается неоднозначно, поскольку тепловые волны не переносят энергию из-за диффузионного характера распространения тепла. Тем не менее, существует волнообразное поведение, когда hea Что позволяет нам использовать сходство между реальными волнами и диффузионными процессами 10 , 11 , 12 . Таким образом, тепловую волну можно понимать как сильно затухающую в направлении распространения, но периодическую по времени ( рис. 1b ). Характерная длина термодиффузии  Описывается его материальными свойствами (теплопроводностью k , теплоемкостью c p и плотностью ρ ) и частотой возбуждения ƒ. Хотя тепловая волна сильно затухает, ее волновая природа может быть применена, чтобы получить представление о свойствах образца. Первое применение интерференции тепловых волн использовалось для определения толщины слоев. В отличие от нашего метода интерференционный эффект использовался в измерении глубины ( т.е. перпендикулярно поверхности) Ref "> 13. Расширяя идею интерференции во втором измерении путем разделения лазерного луча, интерференция тепловых волн использовалась для определения размеров подповерхностных дефектов 14. Тем не менее этот метод применялся в трансмиссионной конфигурации, а это означает, что он был ограничен проникновением Кроме того, поскольку использовался только один лазерный источник, этот метод применяет конструктивную интерференцию, а это значит, что необходима безошибочная ссылка. Помимо идеи использования тепловых волновых помех, первый технический подход к пространственно- Контролируемое по времени нагревание производилось Холтманом и др. С использованием немодифицированного жидкокристаллического проектора (LCD) со встроенным источником света, который был строго ограничен по своей оптической выходной мощности 15. Дальнейшие подходы Прибе и Равичандрана были направлены на увеличение оптического Выходную мощность, также связывая лазер с SLM 16 , S = "xref"> 17.
Описывается его материальными свойствами (теплопроводностью k , теплоемкостью c p и плотностью ρ ) и частотой возбуждения ƒ. Хотя тепловая волна сильно затухает, ее волновая природа может быть применена, чтобы получить представление о свойствах образца. Первое применение интерференции тепловых волн использовалось для определения толщины слоев. В отличие от нашего метода интерференционный эффект использовался в измерении глубины ( т.е. перпендикулярно поверхности) Ref "> 13. Расширяя идею интерференции во втором измерении путем разделения лазерного луча, интерференция тепловых волн использовалась для определения размеров подповерхностных дефектов 14. Тем не менее этот метод применялся в трансмиссионной конфигурации, а это означает, что он был ограничен проникновением Кроме того, поскольку использовался только один лазерный источник, этот метод применяет конструктивную интерференцию, а это значит, что необходима безошибочная ссылка. Помимо идеи использования тепловых волновых помех, первый технический подход к пространственно- Контролируемое по времени нагревание производилось Холтманом и др. С использованием немодифицированного жидкокристаллического проектора (LCD) со встроенным источником света, который был строго ограничен по своей оптической выходной мощности 15. Дальнейшие подходы Прибе и Равичандрана были направлены на увеличение оптического Выходную мощность, также связывая лазер с SLM 16 , S = "xref"> 17.
Представленный здесь протокол описывает, как применить метод LPPT для обнаружения подповерхностных дефектов, ориентированных перпендикулярно поверхности образцов стали. Метод находится на ранней стадии, но все же достаточно мощный, чтобы обосновать предлагаемый подход; Однако она все еще ограничена с точки зрения достижимой оптической выходной мощности экспериментальной установки. Поскольку увеличение оптической выходной мощности остается сложной задачей, представленный способ применяется к покрытой стали, содержащей искусственные вырезы с механическим электрическим разрядом. Тем не менее, наиболее важные и наиболее важные этапы протокола, генерирующие однородное структурированное освещение, удовлетворяющее предпосылкам для разрушающих помех тепловых волн, и обнаружение дефекта, по-прежнему сохраняются и для более требовательных дефектов. Поскольку регулирующей величиной является термодиффузионная длина μ, метод LPPT можно применять и для множества различных материалов.
нт ">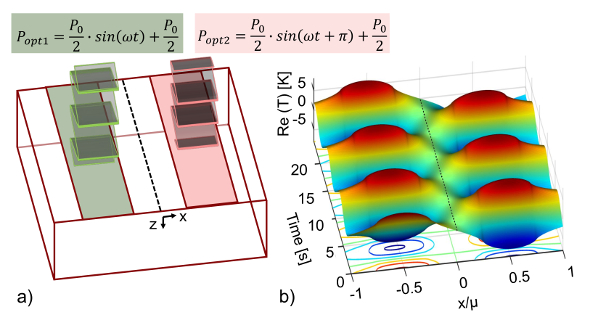
Рисунок 1: Принцип деструктивного интерференционного эффекта. ( A ) Схема диаграммы освещенности, используемой во время экспериментов. Проба пространственно и временно нагревается двумя периодически облучаемыми образцами с фазовым сдвигом π. Пунктирная линия представляет собой линию симметрии между обоими образцами. Эта линия будет использована для оценки как «линия истощения». ( Б ) Схема пространственного и временного разрешения переменного теплового результата, рассчитанная по аналитическому решению уравнения теплопроводности. Он показывает ответные тепловые волны на освещение (a) с облучением двух образцов с P opt 1 = 1,5 Вт sin (2π 0,125 Гц t ) + 1,5 Вт и P opt 2 = 1,5 Вт sin (2π 0,125 Гц t + Π) + 1,5 Вт для конструкционной стали ρ 3 , c p = 461 Дж / (кг · К), k = 54 Вт / (м · K). Температурный профиль на пунктирной линии не показывает тепловых колебаний для однородного изотропного материала. Нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.

Рисунок 2: Схема принципа измерения структурированного нагрева, используемого в активной термографии. Гауссов пучок, гомогенизированный в профиль верхней шляпы, применяется к пространственному модулю света (SLM). SLM разрешает пространственный пучок его переключаемыми элементами и во времени по скорости переключения. Каждый элемент представляет собой пиксель SLM. В этом эксперименте SLM представляет собой цифровое микрозеркальное устройство (DMD). Модулируя яркость пикселя A с помощью детерминированного по времени управляющего программного обеспечения, поверхность образцаНагревается структурированным способом. В представленном эксперименте мы модулируем две антифазные линии (фазы: φ = 0, π), которые являются источником когерентно интерферирующих тепловых полей на угловой частоте ω. Волновые поля взаимодействуют с внутренней структурой образца, также влияя на температурное поле на поверхности. Это измеряется с помощью теплового излучения средней инфракрасной камеры. Нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
ПРИМЕЧАНИЕ. Внимание: Пожалуйста, обратите внимание на безопасность лазера, потому что в установке используется лазер класса 4. Пожалуйста, надевайте защитные очки и одежду. Также обращайтесь с пилотным лазером с осторожностью.
1. Соедините диодный лазер с комплектом для разработки проектора (PDK)
- Подготовьте макет.
- Соберите все устройства на макете, как показано на рисунке 3 . Поместите макет со всеми предварительно собранными устройствами в лазерную лабораторию.
- Установите держатель лазерного волокна на макет.
- Присоедините волокно к держателю лазерного волокна ( см. Рис. 3 ).
- Включите затвор и лазерный порог диодного лазера. Используя высокочувствительную ИК-карту, проверьте выходной диаметр (40 мм) луча. Выключите лазерный порог и включите пилотный лазер. Отрегулируйте высоту оптической оси на держателе лазерного волокна на входе PDK, используя( См. Рис. 4a, 4d ).
- Переместите держатель лазерного волокна вдоль рельса. Наблюдайте за положением пилотного лазера на расстоянии. Его центральная точка не должна двигаться. В этом случае проверьте крепление между лабораторным гнездом и держателем лазерного волокна. Затем закрепите держатель лазерного волокна.
ПРИМЕЧАНИЕ. Рельс является ссылкой для оптической оси и должен быть выровнен параллельно макету. Линзы телескопа должны быть удалены заранее.
- Отрегулируйте телескоп.
- Используйте телескоп для уменьшения диаметра луча от 40 до 15 мм для установки на вход PDK ( см. Рис. 4a, 4d ). Используйте выпуклые линзы 200 мм и 75 мм в качестве первого и второго объективов соответственно. Используйте пилотный лазер и перекрестие для установки первого объектива ( см. Рис. 4b ).
- Грубо отрегулируйте расстояние между обоими объективами с помощью стальной линейки. Снова используйте крестикДля установки линзы на пилотный лазер. Установите второй объектив на этап трансляции xy. Используйте сцену, чтобы коллимировать луч.
- Совместите пробоотборник луча.
- Хит (с лазерным лучом) пробоотборник луча под углом 45 °. Используйте второй рельс, перпендикулярный первому, для размещения пробоотборника луча.
ПРИМЕЧАНИЕ. Большая часть оптической мощности охлаждается измерителем мощности 500 Вт. Оптический выход диодного лазера более стабилен при полной мощности, поэтому оптическая мощность разделена. - Используйте диафрагму в фиксированном по высоте столбе, чтобы проверить путь оптического пути вдоль рельса ( см. Рис. 4а ) с пилотным лазером.
- Хит (с лазерным лучом) пробоотборник луча под углом 45 °. Используйте второй рельс, перпендикулярный первому, для размещения пробоотборника луча.
- Выровняйте зеркало.
- Перед выравниванием зеркала, как показано на рисунке 4c , удалите PDK и его основание. Закрепите третий рельс перпендикулярно второму. Еще раз проверьте оптический путь по диафрагме.
ПРИМЕЧАНИЕ. Оптический путь sДолжен быть ориентирован на ориентацию рельса. Луч должен быть коллимирован.
- Перед выравниванием зеркала, как показано на рисунке 4c , удалите PDK и его основание. Закрепите третий рельс перпендикулярно второму. Еще раз проверьте оптический путь по диафрагме.
- Разберите и установите PDK.
- Перед установкой PDK 18 снимите оригинальный световой двигатель.
ПРИМЕЧАНИЕ. Были две ранее линзы, первоначально коллимирующие светодиоды PDK 19 ( сравните Рисунок 4d , вход). Их склеивают и их необходимо удалить, используя ацетон. - Совместите платформу PDK с параллельной третьей направляющей и, следовательно, с оптической осью балки. Используйте перекрестие, отрегулированное для входа PDK, чтобы расположить PDK относительно луча. Оставайтесь выровненными параллельно. Выключите пилотный лазер, потому что он слишком слаб, чтобы пройти PDK.
- Перед установкой PDK 18 снимите оригинальный световой двигатель.
- Проецируйте белое изображение, чтобы проверить оптическую мощность.
- Убедитесь, что кабель HDMI и USB-кабель PDK, а также плата сбора данных (DAQ) подключены кУправление ПК. Подключите порты к лазерному пульту управления для «лазерного затвора», «лазерного порога» и «лазерного входа» к карте DAQ. Подключите порт «лазерного напряжения управления» сканера блока управления к плате DAQ.
- Запустите программное обеспечение 20 управления PDK и сконфигурируйте его как обычный проектор в соответствии с шагами от i.1 до i.3 на рисунке 5b . Включите второй экран и убедитесь, что во втором экране нет окна. Используйте белый фон рабочего стола и проверьте функцию проектора со светодиодной вспышкой в качестве входного источника света.
ПРИМЕЧАНИЕ. Если белое изображение проецируется на плоскость изображения PDK, устройство работает правильно.
- Проверьте оптическую силу входного сигнала.
- Поместите головку измерителя мощности 30 Вт, подключенную к блоку управления расходомером на оптическом пути перед PDK ( см. Рис. 4e - положение 1). Включите диодный лазерС программным обеспечением для управления лазером LPPT, следуя этапам с i.1 по i.3 на рисунке 5a ) при низком уровне мощности на этапе i.1 = 0,5 В.
ПРИМЕЧАНИЕ. Программное обеспечение для управления лазером LPPT включает плату DAQ, которая переключает выходы управления лазером ( см. 1.7.1). Рассмотрим лазерную безопасность, очки и защитную одежду! - Проверьте положение датчика расходомера с помощью карты мощного ИК-датчика. Держите ИК-карту в луче и наблюдайте, как она светится. Сопоставьте диаметр луча с областью датчика измерителя мощности ( Рисунок 3 ).
- Проверьте максимальную оптическую входную мощность на входе PDK (снова следуйте рис. 5a ), шаг i.1) со значением 10 В.
ПРИМЕЧАНИЕ: оптическая входная мощность на входе PDK должна быть максимально около 22 Вт 21 . При такой конфигурации время измерения до 5 мин допускалось без разрушения SLM, которое в случае PDK реализовано как цифровое микрозеркальное устройство (DMD). - Проверьте мощность оптического выхода.
- Расположите измеритель мощности 30 Вт на расстоянии приблизительно 60 мм от PDK, используя объектив af = 60 мм, прикрепленный к объекту PDK ( см. Рис. 4e ).
- Установите светодиодную вспышку на входе проектора ( см. Рис. 4d ) и включите ее. Точно настройте положение головки измерителя мощности так, чтобы она собирала свет проецируемого изображения, как показано на рисунке 4e . После этого снимите светодиодную вспышку.
- Запустите программное обеспечение для управления лазером LPPT. Введите «0,5 В» в поле «напряжение» и нажмите «Laser On!». кнопка. Прочитайте оптическую мощность от блока управления расходомера. Остановите лазер, нажав кнопку «Стоп». Повторите эти шаги для 2 В, 6 В, 10 В ( см. Рисунок 5a , i.1 - i.3).
ПРИМЕЧАНИЕ. Если напряжение 10 В обеспечивает оптическую выходную мощность &# 62; 4 Вт, первоначальный тест прошел успешно. В противном случае необходимо проверить оптическое выравнивание. Постарайтесь максимизировать оптическую выходную мощность путем тонкой настройки зеркала.
- Измерьте профиль луча.
- Используйте фотодиод с усилителем и отверстием для измерения профиля луча получаемого проецируемого изображения ( см. Рис. 4f ). Если доступно профайлер луча, используйте это устройство, но ослабьте луч.
- Подключите фотодиод к ступени трансляции, которая сама крепится к кронштейну. Также прикрепите светоотражающий фильтр с нейтральной плотностью (ND) 1 и отверстие диаметром 1 мм к диоду. Поместите фотодиод на моторную ступень трансляции и лабораторный разъем. Чтобы получить высоту, используйте два макета (100 мм x 100 мм).
- Используйте объектив AF = 100 мм после объектива PDK ( см. Рис. 4e ) и проецируйте белое изображение с помощью светодиодной вспышки ( см. Шаг 1.7). Переместите фотодиод в плоскость изображения иУбедитесь, что диапазон фотодиода, движущегося на этапе трансляции, находится в пределах проецируемого изображения ( см. Рис. 4f ).
- Подключите фотодиод к источнику питания и к плате DAQ. Используйте усиление 40 дБ для управляющего напряжения 6 В для мощности оптического лазера. Подключите контроллер движения для моторной трансляции к ПК управления.
ПРИМЕЧАНИЕ: Программное обеспечение интенсивности LPPT управляет движением пинфодированного фотодиода через освещенную область с постоянной скоростью v = 0,1 мм / с и записывает сигнал фотодиода на частоте 100 кГц. Лазер также управляется программным обеспечением. - Используйте микрометрический винт ступени с шагом 1 мм, как показано на рисунке 4f , чтобы отсканировать изображение. См . Результаты, показанные на рис. 6a-6b .
- Вычислите корректирующее изображение.
- Чтобы исправить неоднородность профиля луча, вычислить инвертированную пиксельную матрицу относительно лучапрофиль. Определите диапазон проецируемого изображения, используя алгоритм обнаружения края.
- Преобразуйте информацию о времени в пространственную информацию, используя скорость каскада. Преобразуйте пространственную информацию в пиксельный домен PDK с x = 1024 пикселями и y = 768 пикселей. Нормализовать диодный сигнал до максимального значения.
ПРИМЕЧАНИЕ. Исходный уровень для коррекции был выбран со средним значением всех нормированных изображений. Уровень затухания вычисляется с помощью:
P Pixel - это нормализованная интенсивность диода на пиксель. Значения Pixel LC выше 1 устанавливаются в 1. - Умножьте матрицу коррекции ( см. Рис. 6c ) на белое изображение и снова измерьте профиль, чтобы проверить, достаточна ли коррекция ( см. Рис. 6e-6h ).
2. Подготовьте образец
- Поместите головку измерителя мощности 30 Вт, подключенную к блоку управления расходомером на оптическом пути перед PDK ( см. Рис. 4e - положение 1). Включите диодный лазерС программным обеспечением для управления лазером LPPT, следуя этапам с i.1 по i.3 на рисунке 5a ) при низком уровне мощности на этапе i.1 = 0,5 В.
- Используйте два блока конструкционной стали St37 100 х 100 х 40 мм в качестве материала пробы с плотностью ρ = 7850 кг м -3 , коэффициент теплопроводности k = 54 Вт · м -1 · К -1 и теплоемкость C p = 461 Дж · кг -1 · К -1 .
- Вставьте искусственные дефекты в два блока толщиной 0,25 мм, 0,5 мм, 0,7 мм, 1,25 мм и 1 мм, 1,5 мм, 1,75 мм, 2 мм с помощью электроэрозионной обработки под поверхностью, как показано на рисунке 7 .
- Заклейте дефекты с помощью защитной ленты. Пескоструйную обработку верхней поверхности, чтобы получить однородное поглощение. Перед нанесением покрытия заклейте дефекты защитной пленкой. Обезжирьте поверхность, используя ацетон.
- Нанести освещенную область распылителем на графит с расстояния 30 мм дважды (0 ° и 90 °). Покрытие успешно, если имеется однородная поверхность. Если покрытие не повреждено, начните обезжиривание и очистку снова и повторитеЭтап покрытия. Высушите поверхность ~ 2 часа. Не касайтесь поверхности, это изменит излучательную способность.
- Удалите ленту и убедитесь, что графит не попадает в дефект подповерхностного слоя.

3. Подготовить эксперимент
- Подготовить PDK и диодный лазер.
- Проецируйте белое изображение, как описано в шаге 1.7). Проверьте оптическую входную мощность PDK, как описано в шаге 1.8). Проверьте оптическую выходную мощность PDK, как показано в шаге 1.9).
- Подключите головку измерителя мощности 500 Вт к блоку управления расходомером и подключите измеритель мощности к компьютеру управления (ПК) с помощью USB-кабеля.
- Подготовьте контроллер движения и поместите образец.
- Подключите контроллер движения к камере перевода и к компьютеру управления через USB-кабель. Расположите трансляционный кадр, ортогональный оптической оси, на расстоянии около 80 мм относительно PDK.
ПРИМЕЧАНИЕ: softwar LPPTE, управляемый компьютером управления, управляет контроллером движения. - Прикрепите объектив f = 100 мм к объекту PDK. Используйте светодиодную вспышку в качестве входного источника света ( см. Рис. 4d , перекрестье отметьте вход) в PDK, чтобы найти плоскость изображения проектора.
- Расположите белый лист бумаги на расстоянии приблизительно 100 мм перед объективом и переместите его назад и вперед, чтобы найти плоскость ярко освещенного прямоугольника, который является плоскостью изображения.
- Расположите поверхность образца с покрытием в этой плоскости. Установите высоту образца, используя лабораторное гнездо, установленное на этапе линейного перевода. Выберите высоту так, чтобы вершина освещенного прямоугольника попала в верхнюю часть образца ( см. Рис. 4g ). Расположите дефект в пределах досягаемости освещенной области.
- Остановите контроллер движения, выключив и снова включив устройство.
- Подключите контроллер движения к камере перевода и к компьютеру управления через USB-кабель. Расположите трансляционный кадр, ортогональный оптической оси, на расстоянии около 80 мм относительно PDK.
- Подготовьте камеру и поместите золотое зеркало.
- Используйте светодиодную вспышку в качестве входного источника света для проецирования белого изображения на образец.
- Поместите золотое зеркало на такую высоту, чтобы он увидел верхний край образца ( рис. 4g ). Установите зеркало под углом около 35 °, как показано на рисунке 3 . Поместите золотое зеркало как можно ближе к объекту PDK, но не затеняя проекцию.
ПРИМЕЧАНИЕ. Зеркало прикрепляется к столбу в держателе для почтового ящика. Высота и положение фиксируются хомутами. - Установите ИК-камеру на штатив. Выровняйте ИК-камеру с уровнем яблочка. Настройте ИК-камеру на высоту объектива PDK. Расположите его таким образом, чтобы он видел проецируемое белое изображение над золотым зеркалом.
ПРИМЕЧАНИЕ. Ориентировочное расстояние вдоль оптического пути составляет около 1 м. - Используйте дистанционное кольцо между объективом ИК-камеры и ИК-камерой. ДелатьЧто триггерный вход камеры подключен к карте сбора данных измерений, чтобы вызвать захват кадра. Также подключите ИК-камеру к ИК-камере через кабель LAN.
- Включите камеру и подождите, по крайней мере, время прогрева ( около 30 минут).
- Запустите программное обеспечение для управления ИК-камерой. Измените элемент меню на «Камера». Нажмите кнопку «Подключить» для подключения ИК-камеры ( см. Рис. 8a , шаг i.1).
ПРИМЕЧАНИЕ. Камера показывает живое изображение сцены. - Нажмите кнопку «Remote», чтобы открыть панель «Remote Control» ( см. Рис. 8d , шаг i.2). Выберите калибровку «HF 100mm (-10 ° C - 60 ° C) 1140 мкс». См . Рис. 8d , шаг i.2.1.
ПРИМЕЧАНИЕ. Диапазон калибровки должен быть как можно меньше, чтобы снизить уровень шума. - Ручно отрегулируйте фокусировочное кольцо объектива, чтобы сфокусировать ИК-камеру наПлоскости образца.
ПРИМЕЧАНИЕ. Поле зрения камеры должно быть столь же большим, как максимальная проецируемая область, чтобы иметь максимальное пространственное разрешение ( см. Рис. 4g ). Возможно, придется изменить положение, высоту и ориентацию ИК-камеры. Для того чтобы определить, является ли изображение резким, необходим температурный контраст в плоскости изображения. Для создания контраста можно использовать стальную линейку. Если ИК-изображение по-прежнему имеет низкий контраст, его можно отрегулировать с помощью инструмента выбора ( см. Рис. 8c , i.3) - Выполните коррекцию неравномерности, нажав кнопку «NUC» ( см. Рис. 8d , шаг i.2.2). Накройте объектив ИК-камеры и нажмите кнопку «ОК».
- Определите взаимосвязь между областью пикселя ИК-камеры и координатами проектора.
- Определите взаимосвязь между пиксельным доменом PDK, доменом пикселя ИК-камеры и файломNgth образца, проецируя белое изображение или образец на поверхность образца ( см. Рисунок 4 g, h ). Измерьте проецируемую область с помощью стальной линейки, которая дает связь между доменом PDK и шкалой длины образца.
- Используйте объектив f = 100 мм, прикрепленный к объекту PDK, чтобы получить освещенную область 21,3 мм x 16 мм (4: 3).
ПРИМЕЧАНИЕ. Шкала длин в координатах PDK: 1 проецируемый пиксель = 21,3 мм / 1024 пикселя - Найдите взаимосвязь между PDK и ИК-камерой. Повторите шаг 1.9.3) для 10 В.
- Используйте программное обеспечение ИК-камеры, чтобы изменить пункт меню «Измерять». Выберите «Перекрестный инструмент» на панели инструментов «Мера областей» ( см. Рисунок 8c ), шаг i.4). Пометьте углы полученного теплового изображения, щелкнув левой кнопкой мыши на показанном кадре.
- Щелкните правой кнопкой мыши на кресте, чтобы перейти к окну свойств. Перейдите в «координаты» и запишите их дляПозднее преобразование теплового изображения в систему координат PDK.
4. Внедрение эксперимента
- Подготовьте эксперимент.
- Оцените площадь освещения относительно шкалы длин образца.
- Используйте объектив f = 100 мм, чтобы получить освещенную область 5,5 мм x 16 мм на образец. Выберите область между ними 5.5 мм х 16.5 мм, которая не подсвечивается.
ПРИМЕЧАНИЕ. Полученная интенсивность излучения составляет примерно 1,2 Вт / см².
- Используйте объектив f = 100 мм, чтобы получить освещенную область 5,5 мм x 16 мм на образец. Выберите область между ними 5.5 мм х 16.5 мм, которая не подсвечивается.
- Оцените область освещения в единицах относительно домена пикселя PDK.
- Измените положение подсвеченного изображения в пиксельном домене PDK (1024 пикселя x 768 пикселей), используя уравнение на этапе 3.4.2). Используйте [(512, 1); (512, 768)] пикселей в домене PDK в качестве линии истощения, которая симметрична между обоими шаблонами.
- Вычислите общее количество кадров, время измерения и кадры peR период. Предполагая, что скорость v = 0,05 мм / с, расстояние пробега x = 10 мм и частота кадров PDK ƒ r = 40 Гц, вычислите время t измерения t через t = x / v = 200 с. Кроме того, вычислить количество кадров нет ƒ = ƒ r • t = 8,000. При частоте возбуждения ƒ = 0,125 Гц вычисляют кадры за период p с p = no ƒ / t ƒ = 320 кадров / период.
Примечание. Эти значения будут использоваться для создания проецируемых изображений. - Проверьте настройку и убедитесь, что лазерная система, ИК-камера и (опционально) терморегулятор подключены к плате DAQ. Проверьте, подключен ли к ПК управления измеритель мощности 500 Вт, PDK и линейный каскад.
- Оцените площадь освещения относительно шкалы длин образца.
- Настройте ПК для управления камерой.
- Настройте программное обеспечение для управления ИК-камерой, чтобы захватить кадр, когда ИК-камера получает вход триггера. Для этого sНа панель «Камера» и нажмите кнопку «Пульт» ( см. Рис. 8a , шаг i.2), чтобы открыть панель дистанционного управления. В раскрывающемся меню выберите «Process IO» ( рис. 8d , шаг i.2.3) и включите «Sync In» и «Gate» и закройте меню.
- Откройте меню сбора данных, щелкнув в правом нижнем углу вкладки «Параметры сбора» ( см. Рис. 8a , i.5). Выберите «Ext / Sync» из выпадающего меню ( см. Рис. 8b , i.5.1). Назовите измерение, введя имена файлов и папок в поле «Папка» (см . Рис. 8b , i.5.2).
- Введите общее число кадров, вычисленное с шага 4.1.3, в поле «счет» ( см. I.5.3). Закройте меню сбора данных и нажмите кнопку «Запись», чтобы начать сбор данных ИК-камеры ( см. Рис. 8 , i.6).
ЗАМЕТКА:Запись будет производиться только при наличии триггерного входа с карты DAQ.
- Проведите эксперимент.
- Запустите программное обеспечение управления LPPT. Активируйте контроллер движения, нажав кнопку «Активировать?». ( Рис. 9a , i.1). Задайте параметры перемещения «StartPosition» = «-5 мм», «EndPosition» = «5 мм» и «Velocity» = «0,05 мм / с», отредактировав соответствующие именованные поля, как показано на рис. 9a , i.1. Нажмите кнопку «Начать измерение» (см . Рис. 9a , i.2).
ПРИМЕЧАНИЕ. Если неясно, где находится дефект, выберите большее расстояние перемещения на более высокой скорости. Обратите внимание на повышение температуры PDK и количество созданных данных. Обратите внимание, что появится пользовательский интерфейс для создания изображений кадра ( см. Рис. 9b ). - Сгенерируйте проецируемые образы кадров. <ол>
- Щелкните левой кнопкой мыши на поле «Выбрать цвет области». Выберите цвет для области рисунка в диалоговом окне цвета ( рис. 9 , i.3). Выберите «инструмент прямоугольника» на панели инструментов чертежа в верхнем левом углу.
- Нарисуйте прямоугольник в области изображения, щелкнув левой кнопкой мыши и удерживая при этом над областью изображения. Используйте координаты преобразованного шаблона из шага 4.1.2), чтобы определить координаты прямоугольника, показанные в левом нижнем углу (i.4). Нажмите кнопку «Определить область» ( рисунок 9b , i.5).
ПРИМЕЧАНИЕ. Вычисленные координаты пикселей в домене PDK для размера паттерна 5,5 мм: Прямоугольник 1 (x1 = 116, y1 = 1, x2 = 380, y2 = 768), Прямоугольник 2 (x1 = 644, y1 = 1, x2 = 908, y2 = 768). После нажатия кнопки «Определить область» появится диалоговое окно для установки свойств рисунка.
- Запустите программное обеспечение управления LPPT. Активируйте контроллер движения, нажав кнопку «Активировать?». ( Рис. 9a , i.1). Задайте параметры перемещения «StartPosition» = «-5 мм», «EndPosition» = «5 мм» и «Velocity» = «0,05 мм / с», отредактировав соответствующие именованные поля, как показано на рис. 9a , i.1. Нажмите кнопку «Начать измерение» (см . Рис. 9a , i.2).
- Задайте свойства рисунка ( рисунок 9c , i.6).
- Выберите «синусоида» изВыпадающего меню, щелкните левой кнопкой мыши по полю «Тип сигнала». Определите параметры колебаний, установив поля «Фазовый сдвиг» на «0 °», «Частота» на «0,125 Гц» и «Амплитуда» на «127» (сдвиг фаз 0 для первого паттерна и сдвиг фазы π для второй).
- Установите напряжение лазера на 10 В, вставив «10» в поле «Напряжение». Вставьте 320 в поле «Фото / период», используя значение с шага 4.1.3). Нажмите кнопку «Далее»; Это закрывает панель.
ПРИМЕЧАНИЕ. Программное обеспечение управления LPPT вычисляет периодический поток изображения с разрешением PDK. Поскольку белый пиксель означает максимальную оптическую мощность и низкую мощность черного пикселя, рассчитываются два осциллирующих шаблона. Серое значение первого шаблона вычисляется с P 1 = 127 sin (2π 0,125 Гц t ) + 127, а второго - с P 2 = 127 sin (2π 0,125 Гц t+ Π) + 127 (см . Рисунок 2 , график), тогда как время t дискретируется с выбранной частотой кадров ( см. Шаг 4.3.4).
- Создайте второй проецируемый узор.
- Повторите шаги 4.3.2) и 4.3.3), следуя технологическому процессу на рис. 9, но с другим цветом и другим «сдвигом фазы», равным «180 °». Нажмите кнопку «calc Frames», чтобы вычислить проецируемые шаблоны. Установите частоту кадров PDK и ИК-камеры в появившемся диалоговом окне «40 Гц».
- Загрузите исправленное изображение.
- Следуйте последовательности действий на рис. 9b ), шаг i.12. Выберите панель «Коррекция нагрузки» и предоставьте файл для вычисленного изображения с шага 1.11). Загрузите корректирующее изображение, нажав кнопку.
- Запустите измерение, нажав кнопку «Пуск» ( см. Рис. 9b , шаг i.13).
ПРИМЕЧАНИЕ. Вычисленные кадры будут проецироваться на образец во время движения сцены. Кадры будут получены и подсчитаны с помощью программного обеспечения для управления ИК-камерой. - Остановите измерение, когда все кадры будут получены (индикатор выполнения = 100%), нажав кнопку «Stop Measurement» ( см. Рис. 9a , i.14).
ПРИМЕЧАНИЕ: Метка кнопки изменится при нажатии.
5. Постпроцесс файла данных
- Запустите ПО для последующей обработки LPPT. Нажмите кнопку «Загрузить» и выберите файл измерения в диалоговом окне файла. Нажмите «ОК», чтобы преобразовать формат данных камеры в формат данных последующей обработки ( см. Рис. 10a ).
ПРИМЕЧАНИЕ. Данные ИК-камеры хранятся на ПК управления ИК-камерой в собственном формате. Комплект для разработки программного обеспечения для управления ИК-камерой используется для преобразования последовательности ИК-камер в трехмерную матрицу (пиксель X, пиксель Y, номер кадра) иВключающий в себя вектор времени t. - Преобразуйте данные ИК-камеры в домен PDK ( см. Рис. 10b ), вставив координаты четырех проекционных точек P1x-P4y с шага 3.4.3) и щелкнув «Transform».
ПРИМЕЧАНИЕ. Из-за проекции изображения через золотое зеркало на ИК-камеру ( см. Рис. 4g ) полученное ИК-изображение искажено. Аффинное геометрическое преобразование выполняется из домена ИК-камеры в домен PDK. В результате получается матрица размером 1024 × 768 × номер кадра. - Извлеките информацию о температуре на линии истощения ( см. Рис. 10c ).
- Определить линию истощения с двумя точками L1 и L2, заполнив поля L1x = Lx2 = «512» пикселей, как это уже было выбрано на этапе 4.1.2). Выберите y от L1y = "343" до L2y = "393". См . Рис. 10c .
ПРИМЕЧАНИЕ. Из-за преобразования на этапе 5.2) данные могут бытьВосстанавливается сразу, но появляются побочные эффекты, потому что образец только частично освещен. Поэтому не оценивайте краевые области узоров. Если шум все еще слишком велик, размер y может быть увеличен. - Установите экспериментальные параметры для ИК-камеры, заполнив следующие поля: FrameRate - «40» Гц, частота - «0,125» Гц, скорость v - «0,05» мм / с и начальное положение «Начало» - «-5» мм ( см. Фиг.10с ). Задайте параметры для последующей обработки данных: «Fit Degree» = «7», «Smoothing» = «20» и «Hilbert» = «500», как на рисунке 10c .
ПРИМЕЧАНИЕ. Данные, извлеченные на линии истощения, геометрически усредняются. Затем чередующийся температурный терм ΔT (см . Рис. 11a, b ) извлекается путем выполнения полиномиальной подгонки (Fit Degree). Результирующий сигнал сглаживается фильтром скользящего среднего (сглаживание).Наконец, для получения мгновенной амплитуды применяется преобразование Гильберта. Другой фильтр скользящего среднего (Гильберт) применяется для уменьшения остаточной ряби. Используя информацию об амплитуде минимума, получается положение скрытого дефекта. - Нажмите «Вычислить», чтобы выполнить анализ данных. Считайте вычисленное положение дефекта из поля «CrackPosition [мм]». Положение дефекта показано в окне на рисунке 10d .
- Определить линию истощения с двумя точками L1 и L2, заполнив поля L1x = Lx2 = «512» пикселей, как это уже было выбрано на этапе 4.1.2). Выберите y от L1y = "343" до L2y = "393". См . Рис. 10c .

Рисунок 3: Фотография экспериментальной установки с выделенным оптическим путем (красная линия). Лазерное волокно крепится к волокну диодного лазера. Луч регулируется телескопом до входного диаметра PDK. Перед входом в PDK, луч делится на балочный пробоотборник и контролируется измерителем мощности. Внутри PDK пучок гомогенизируетсяИ проецируется в DMD. PDM, управляемый программным обеспечением управления LPPT, проецирует образцы освещения на образец. Проецируемый свет фототермически преобразуется и нагревает образец. Температура измеряется ИК-камерой через тепловое излучение (оранжевая линия), излучаемое с поверхности образца. Сам образец позиционируется на стадии линейного перевода. Нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.

Рисунок 4: Последовательность фотографий, показывающая настройку экспериментальной установки. ( A ) Вид сверху экспериментальной установки показывает обзор. ( B ) Выравнивание телескопа: перекрестие используется для центрирования линзы к оптической оси лазерного луча. ( C ) Выравнивание оптических элементов:D к оптическому стенду используется для выравнивания оптического луча относительно скамьи. Для поддержания луча параллельно скамье используется фиксированная по высоте ирисовая диафрагма. ( D ) Фотография сбоку точки соединения между проектором и балкой. Перекрестье используется для выравнивания проектора с лучом. ( E ) Определение передачи системы проектора: измеритель мощности используется для измерения оптической мощности до и после проектора. ( F ) Определение профиля луча: Пинхол и фильтр ND1 устанавливаются на диод, который перемещается через два линейных этапа через проецируемое изображение. Проектор должен быть сконфигурирован для проецирования белого изображения. ( G ) Расположение инфракрасной камеры на образце через золотое зеркало: образец должен быть расположен в плоскости изображения проектора. Для контроля плотности мощности можно использовать объективы и дополнительные объективы, прикрепленные к объективу. ( H ) ОпределениеМасштаба между проецируемым изображением, изображением ИК-камеры и фактической длиной образца. Нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.

Рисунок 5: Скриншоты программного обеспечения. ( A ) Снимок экрана программного обеспечения для лазерного управления LPPT. ( B ) Программное обеспечение для управления PDK. На шагах от i.1 до i.3 показано, как настроить PDK как обычный проектор. Нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.

Рисунок 6: Коррекция неоднородного профиля луча. ( A ) Профиль пучка проецируемого белого изображения (полное освещение), Фотодиод, который был перемещен через профиль. Данные показывают неоднородный профиль луча с заметным пиком в середине. ( B ) Профиль линии поперечного сечения, соответствующий красной линии в а). ( C ) Коррекция изображения, которое накладывается на SLM с проецируемым белым изображением, чтобы уменьшить уровень неоднородности. ( D ) Соответствующий профиль линии поперечного сечения красной линии в c). ( E ) Полученный профиль луча после коррекции показывает профиль ближе к профилю верхней шляпы. ( F ) Соответствующий профиль линии поперечного сечения красной линии в д). ( G ) Профиль освещенности двух скорректированных узоров. Модели будут модулироваться с той же частотой и амплитудой, но с противоположными фазами, создающими зону разрушающей интерференции между рисунками. ( H ) Соответствующий профиль линии поперечного сечения красной линии в g). Ve.com/files/ftp_upload/55733/55733fig6large.jpg "target =" _ blank "> Нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.

Рисунок 7: Подготовка образца. ( A ) Фотография поверхности образца, на которой показан блок из черной стальной конструкционной стали St37 (20 мм x 0,5 мм x 15 мм). ( Б ) Прозрачный рисунок САПР подземных дефектов. Дефекты расположены на 40 мм с правой стороны. ( C ) Фотографии сбоку образцов, демонстрирующих идеализированные дефекты на разной глубине под поверхностью (сторона 1 = 0,25 мм, сторона 2 = 0,5 мм, сторона 3 = 0,7 мм, сторона 4 = 1,25 мм). Стороны образца не покрыты, чтобы уменьшить потери тепла. Второй образец (не показан) имеет свои дефекты под поверхностью: сторона 1 = 1 мм, сторона 2 = 1,5 мм, сторона 3 = 1,75 мм, сторона 4 = 2 мм.= "_ Blank"> Нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.

Рисунок 8: Скриншоты программного обеспечения для управления ИК-камерой. На шагах от i.1 до i.5 показано, как настроить ИК-камеру для сбора данных. ( A ) Снимок экрана панели «Камера»: ИК-камера может быть подключена к ПК управления ИК-камерой с помощью кнопки «Подключить». Отсюда можно перейти к панели «Remote» (b) и панели сбора данных (d & e). Кроме того, измерение можно запустить кнопкой «Запись». ( B ) Снимок экрана панели «Приобретение»: ИК-камера должна быть сконфигурирована через «Ext / Sync», чтобы захватить кадр, если он получает TTL-триггер на 5 В. ( C ) Снимок экрана панели «Измерение»: диапазон отображения данных может быть отрегулирован кнопкой «Выбор». Инструменты точки и линииИспользуются для калибровки изображения ИК-камеры в реальных координатах. ( D ) Снимок экрана панели дистанционного управления ИК-камерой «Калибровки». Для достижения высокой чувствительности должен быть выбран небольшой диапазон измерения (от -10 до 60 ° C). ( E ) Панель дистанционного управления ИК-камерой: «Process-IO», «IN1» и «IN2» должны быть включены для запуска ИК-камеры. Нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.

Рисунок 9: Скриншоты программного обеспечения управления LPPT. Рабочий процесс взаимодействия пользователя с программным обеспечением отмечен как шаги от i.1 до i.14. ( A ) Снимок экрана основной панели LPPT; «Активированный?» Является булевым типом и активирует этап if true. «Start-» и «EndPosi»«Скорость» определяется в мм / с. Кнопка «Начало измерения» начинает измерения, открывает диалоговое окно, показанное на панели (b), и останавливает измерение, если оно ложно. ( B ) Снимок экрана пользовательского интерфейса, используемого для создания шаблонов, проецируемых на образец, выбирается для представления области пикселей. Область выбирается путем рисования прямоугольников к изображению. Если нажать кнопку «определить область», Панель, показанная на панели (c), появится, чтобы определить свойства области. После определения всех областей кнопка «calc Frames» вычислит набор изображений. «Коррекция нагрузки» предоставит диалоговое окно для загрузки коррекции Изображение, чтобы избежать неоднородного профиля луча.Кнопка «Старт» начнет измерение. ( C ) Снимок экрана пользовательского интерфейса, используемого для установки свойств одного шаблона. Верхний кадр показывает тип сигнала (синусоида), фазовый сдвигВ градусах и частотах в Гц. Нижний кадр показывает кадры за период, амплитуду от 1 до 127 и напряжение лазера (от 0 В до 10 В = от 0 Вт до 500 Вт). Фреймы за период - это значение, представляющее, как мелко период дискретизируется. После нажатия кнопки «Далее» (далее), открывается диалоговое окно и запрашивается частота кадров камеры в Гц и скорость переключения кадров в Гц. Нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.

Рисунок 10: Скриншоты программного обеспечения LPPT для последующей обработки. ( A ) Загрузите и трансформируйте собственный формат данных ИК-камеры. ( B ) Преобразуйте матрицу кадров в систему координат проекторов, используя точки преобразования P1x-P4y. ( C ) L1x - L2y представляют координаты пикселя оцениваемой линии. &«V», «xStart», «FrameRate» и «Frequency» являются экспериментальными параметрами. «V» - это скорость в мм / с, «xStart» начальное положение ступени в мм, «FrameRate» и «Frequency «Fit Degree», «Smoothing» и «Hilbert» являются параметрами оценки. Fit Degree представляет степень полиномиального соответствия, «Smoothing» представляет число элементов для фильтра скользящего среднего, используемого для уменьшения шума и Параметр «Гильберт» используется для установки уровня сглаживания для нахождения минимума кривой. ( D ) Снимок экрана с результатом, показывающим положение трещины в виде вертикальной пунктирной линии. Нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
В соответствии с протоколом для получения репрезентативных результатов была выбрана сторона 1 образца стали с дефектом подповерхностного слоя на глубине 0,25 мм. Дефект первоначально располагался приблизительно в центре освещенной области. Затем образец перемещали от -5 мм до 5 мм через линейную ступень со скоростью 0,05 мм / с. Используя эти параметры, на рисунке 11a показаны данные сканирования после извлечения их из строки истощения. На этом этапе успех эксперимента можно оценить, так как необработанные данные доступны из программного обеспечения для управления ИК-камерой в качестве предварительного просмотра (необязательно: используйте инструмент линии для предварительного просмотра данных, см. Рисунок 8 , шаг i.4) , После дополнительной обработки сигнала на рис. 11b показано положение дефекта в минимуме кривой Гильберта (синий) на 0,3 мм.
Чтобы проверить эксперимент, кривая должна hИмеют следующие свойства: он должен быть симметричным, иметь ярко выраженный минимум в плоскости симметрии и два равных максимума слева и справа. Максимумы возникают из-за того, что тепловой поток от одного из линейных источников доминирует над другим из-за накопления тепла при дефекте. Это особенно касается случая, когда дефект расположен близко к плоскости симметрии. Дефект образует барьер для теплового потока, поэтому мы можем наблюдать тепловой поток доминирующего источника и его отражение от дефекта. Если дефект расположен симметрично посередине, тепловой поток разделяется одинаково, что приводит к минимуму 1 .
Эффект от скорости сканирования показан на рисунке 11c . Здесь скорость сканирования удваивалась до 0,1 мм / с для оценки того же дефекта. Раньше образец слегка сдвигался по сцене, чтобы получить другое относительное положение. Определено положение дефектаСоставлять -2 мм. Уровень удлинения был аналогичен показанным на рис. 11a данным, демонстрирующим хорошую воспроизводимость эксперимента, но с меньшим количеством колебаний. Поскольку максимальное удлинение коррелирует с глубиной дефекта, информация о положении и глубине также может поддерживаться 1 .
На рисунке 11d показан субоптимальный набор данных. Дефект был на 1 мм ниже поверхности, что почти на пределе обнаружения этой диффузионной длины и доступной оптической мощности. Хотя местоположение дефекта все еще можно определить, неопределенность измерения больше, поскольку на местоположение колебания нуля уже оказывает влияние шум. Из этого поведения мы можем сделать вывод, что наиболее очевидными признаками неудачи эксперимента по обнаружению дефектов являются случаи, когда линия истощения полностью исчезает или имеет место сильное асимметричное поведение. Это может быть связано с(I) пространственное разрешение ИК-камеры недостаточно, и линия истощения не может быть решена должным образом, (ii) шум камеры слишком высок по сравнению с повышением температуры, (iii) картина освещения является (Iv) выбранная скорость каскада слишком высока по сравнению с частотой модуляции диаграммы освещения и (v) длина термодиффузии (через частоту модуляции) не приспособлена к дефекту глубина.

Рисунок 11: Репрезентативный набор данных из экспериментов по обнаружению дефектов подповерхностного слоя. ( A ) Репрезентативные экспериментальные данные из образца St37, сторона 1 с дефектом на глубине 0,25 мм. Черная линия показывает информацию о температуре с течением времени (верхняя ось). Путем перевода ступени со скоростью v = 0,05 мм / с, позиция(Нижняя ось). Красная кривая показывает полиномиальное соответствие (7 -я степень), используемое для получения переменной составляющей температуры. Пунктирная красная линия представляет положение дефекта подповерхностного слоя. ( Б ) Черная кривая показывает график чередующейся температуры, полученный путем вычитания полиномиального соответствия из данных температуры панели (а). Синяя кривая была получена путем применения преобразования Гильберта к черной кривой и усреднения. ( С ) Характерные экспериментальные данные с той же стороны в диапазоне от -7 мм до 3 мм при скорости этапа 0,1 мм / с. Частота уменьшается вдвое, но удлинение подобно панели (а). ( D ) Субоптимальные экспериментальные данные, полученные, когда дефект подповерхностного слоя находился на глубине 1 мм. Нажмите здесь, чтобы просмотреть увеличенную версию этого рисунка.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Представленный протокол описывает, как обнаружить искусственные подповерхностные дефекты, ориентированные перпендикулярно поверхности. Основная идея метода - создание интерферирующих тепловых волновых полей, взаимодействующих с дефектом подповерхностного слоя. Наиболее важными шагами являются (i) объединение SLM с диодным лазером для создания двух чередующихся мощных схем освещения на поверхности образца; Эти модели фототермически преобразуются в когерентные тепловые волновые поля, (ii) позволяют им разрушающе вмешиваться во взаимодействии с дефектом подповерхностного слоя и (iii) локализовывать эти дефекты при сканировании поверхности динамической температуры поверхности образца с использованием тепловизионной обработки ИК-камера. Так как требуется только относительное колебание температуры вокруг медленно меняющегося среднего значения, а не абсолютное значение температуры, этот подход чрезвычайно чувствителен к скрытым дефектам 1 .
Один из самых важных шаговВ протоколе заключается в установлении достаточной однородности профиля осветительного луча при использовании SLM-связанных лазерных источников для структурированного нагрева (см. Шаг 1.10). Лазер диода обеспечивает высокую интенсивность излучения, но его необходимо подавать в проектор, содержащий SLM, с правильным диаметром и направлением луча. Из-за незначительных неизбежных геометрических и спектральных несоответствий с запатентованным оптическим путем внутри проектора искаженное изображение на образце. Поэтому численная коррекция значений интенсивности изображения, управляющих проецируемым изображением, выполняется с помощью измерения профиля опорного луча. Вторым критическим шагом для успешного эксперимента является достижение высокого пространственного разрешения ИК-изображения (см. Шаги 3.3.7-3.3.8). Зона истощения должна быть достаточно пространственно разрешена, иначе истощение и, следовательно, положение дефекта не может быть измерено.
Природа применяемых тепловых волн является диффузионно-подобнойПроцесс, который приводит к сильному ослаблению их амплитуды только на несколько миллиметров. Мы соответствуем этому внутреннему физическому ограничению, используя в качестве источника света мощный диодный лазер. Узким местом нынешней экспериментальной установки является предел термического напряжения SLM 21 , что означает, что может быть применена только часть доступной мощности лазера. Нашим текущим решением является покрытие поверхности образца черным графитовым покрытием. В будущем мы ожидаем установки с повышенной чувствительностью с использованием оптимизированных световых двигателей или даже переключаемых прямых лазерных массивов, таких как мощные вертикально-резонаторные излучатели с поверхностным излучением (VCSEL) 22 .
Основное отличие этого метода от существующего тепловидения в неразрушающем контроле заключается в том, что мы используем деструктивную интерференцию полностью когерентных тепловых волновых полей; Что возможно только после контроля амплитуды и фазы набора отдельных liGht источников детерминированным способом. В рамках существующих термографических методов используется либо планарный источник света, контролируемый во временной области, либо однофокусное лазерное пятно, управляемое в пространственной области. Основным преимуществом нашего подхода является высокая чувствительность к дефектам, лежащим перпендикулярно поверхности образца.
К настоящему времени создано только два отдельных источника света. С помощью лазерного SLM мы можем, в принципе, генерировать и контролировать до миллиона индивидуальных источников света - одного миллиона источников тепла - на поверхности образца. Очевидно, что этот подход открывает возможности произвольного формирования тепловых волн в долгосрочной перспективе и передачи технологий от ультразвука или радара до области активной термографии в физических пределах. Как только проблема облучения, как указано выше ( т.е. оптическая мощность на проецируемый пиксель), будет удовлетворительно решена, даже детектируемые меньшие дефекты, расположенные глубже под поверхностью, должны стать детектируемыми. Так далеко,Сталь была испытана, но этот способ является очень перспективным, особенно для пластмасс, составного материала и других чувствительных материалов, из-за низкого термического напряжения.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Авторам нечего раскрывать.
Acknowledgments
Мы хотели бы поблагодарить Taarna Studemund и Hagen Wendler за то, что они сделали фотографии экспериментальной установки, а также подготовили их для публикации рисунков. Кроме того, мы хотели бы поблагодарить Anne Hildebrandt за подготовку образца и Siddhar Unnikrishnakurup, Александра Баттига и Феликса Фрицше за корректуру.
Materials
| Name | Company | Catalog Number | Comments |
| 500 W diode laser system, 940 nm | Laserline | LDM 500 - 20 | Pilot laser class 2 @ 650 nm, diode laser is a class 4 laser system --> special laboratory needed |
| Laser control box | Laserline | Laser control box LDM | Add on to the laser system, used to switch electronically, laser threshold, shutter, laser on 0 V..5 V TTL |
| Control box scanner | Laserline | Add on to the laser system, used to adjust the optical output power via analog signal from 0 V..10 V | |
| Fiber Laser Mount 2", f = 80 mm | Laserline | Add on to the laser system | |
| Multifunction Data Aquisition (DAQ) Device + BNC Terminal | National Instruments | NI-USB 6251 | The DAQ card is used to trigger the IR camera, the DLP Light Commander 5500, control Laser and diode PDA 36A |
| Standard - PC | Control PC - graphic card for two screens, at least 4 x USB, Windows based | ||
| BNC cabel | Standard cable | ||
| HDMI cable | Standard cable | ||
| Micro USB to USB cable | Standard cable | ||
| LabVIEW 2013 SP1 Development System | National Instruments | Development environment for device control | |
| LPPT control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT intensity software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT laser control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| Matlab 2016b | MathWorks | Postprocessing of the measurement data | |
| LPPT postprocessing software | BAM | Postprocessing of the measurement data | |
| IR camera control PC | InfraTec | Control PC is supplied by camera distributor | |
| IR camera control software | InfraTec | Irbis 3 Professional | |
| InfraTec SDK | InfraTec | Dynamic Link Library as interface between the native data aquisition format of Infratec and Matlab | |
| IR camera | InfraTec | Image IR 8300 | 640 x 512, cooled InSb detector, wavelength 2 µm..5.7 µm, noise = 20 mK + accessories (LAN cable, Digital in/out cable, space ring, power supply, case) |
| Tripod | Manfrotto | 161MK2B | |
| IR camera mount | Manfrotto | 405 | |
| Projector development kit (PDK) for digital light processing (DLP) technology (DLP Light Commander 5500) | Logic PD | DLP-LC-DLP5500-10R | DLP5500 Digital Micromirror Device from Texas Instruments included , light engine and case need to be disassembed |
| PDK control software | Logic PD | Included when delivered, DLP Light Commander control software | |
| Mechanical platform for the PDK | BAM | Self made (140 x 230 x 420) mm3 | |
| Power meter control unit | Ophir | Vega | USB Interface |
| 30 W power meter head | Ophir | 30(150)A-LP1-18 | Power meter head to determine Transmission of the projector system |
| 500 W power meter head | Ophir | FL500A | Power meter for process supervision |
| Motion controller | Newport | ESP301 | with USB Interface |
| Translation stage | Newport | M-ILS200CC | Connected to ESP301 |
| Photodiode with amplifier | Thorlabs | PDA 36A-EC | 1" mount |
| Reflective filter ND1 | Thorlabs | ND10A | to be mounted to the PDA 36A |
| Pinhole 1" | Thorlabs | P1000S | to be mounted to the PDA 36A |
| Optical aluminium breadboard | Thorlabs | MB60120/M | (1,200 mm x 900 mm) base |
| Plano Convex Lens f = 200 mm | Thorlabs | LA1979-B | Coated for IR, first telescope lens |
| Plano Convex Lens f = 75 mm | Thorlabs | LA1145-B | Coated for IR, second telescope lens |
| xy-translation stage | Newport | M401 | Used for adjusting the telecope |
| Beamsampler | Thorlabs | BSF20-B | Splits the optical output, used to reduce the optical input for the projector system |
| Mirror | Thorlabs | BB2-E03 | Mirror for coupling the beam to the DLP Light Commander |
| Heavy duty lab jack | Thorlabs | L490 | Used for the fiber mount and on top of the linear stage to position the sample (2x) |
| PDK-objective | Nikon | Nikon AF Nikkor 50 mm 1:1:8:D | Objective for DLP Light Commander, 50 mm |
| Plano Convex Lens f = 100 mm | Thorlabs | LA1050 -B | Lens is attached to the Nikon Objective |
| Bi-Convex Lens f = 60 mm | Thorlabs | LB1723 -B | Lens to be attached to the Nikon objective in order to determine the optical transmission with the 30 W measurement head |
| Square protected gold mirror | Thorlabs | PFSQ20-03-M01 | |
| High power IR sensor card | Newport | F-IRC-HP-M | Sensor card to check the optical pathway |
| 2" crosshairs | BAM | Self-made | |
| 1" crosshairs | BAM | Self-made | |
| Bullseye level | Thorlabs | LCL01 | |
| Translation Stage | Newport | M-UMR8.25 | Used for measuring the beam profile |
| Micrometer screw | Newport | DM17-25 | Used with translation stage M-UMR8.25 |
| Mounted Zero Aperture Iris | Thorlabs | ID75Z/M | used to check the optical pathway |
| Bases and Post Holders Essentials Kit, Metric and Universal Components | Thorlabs | ESK01/M | Basis |
| Posts & Accessories Essentials Kit, Metric and Universal Components | Thorlabs | ESK03/M | |
| M6 Cap Screw and Hardware Kit | Thorlabs | HW-KIT2/M | |
| Construction Rails | Thorlabs | XE25L700/M | |
| 1" Construction Cube | Thorlabs | RM1G | Used to mount construction rails |
| Electrical discharge machining | Sodick | AG60L | www.sodick.de |
| St37 block of steel (100 x 100 x 40) mm3 |
BAM | self-made, hidden defect with remaining wall thicknesses of 0.25 mm, 0.5 mm, 0.70 mm, 1.25 mm (shown in Figure 5) | |
| St37 block of steel (100 x 100 x 40) mm |
BAM | self-made, hidden defect with remaining wall thicknesses of 1 mm, 1.5 mm, 1.75 mm, 2 mm (shown in Figure 5) | |
| Graphite spray | CRC Industries Europe NV | GRAPHIT 33 | Ref. 20760, 200 mL aerosol (Kontakt-Chemie) |
| Protective tape | Tesa | tesakrepp 4348 | used to protect the hidden defects while coating |
References
- Thiel, E., Kreutzbruck, M., Ziegler, M. Laser-projected photothermal thermography using thermal wave field interference for subsurface defect characterization. Appl. Phys. Lett. 109 (12), 123504 (2016).
- Ibarra-Castanedo, C., Tarpani, J. R., Maldague, X. P. V. Nondestructive testing with thermography. Eur. J. Phys. 34 (6), 91-109 (2013).
- Maldague, X. P. Introduction to NDT by active infrared thermography. Mater. Eval. 60 (9), 1060-1073 (2002).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning pulsed laser spot thermography. Ndt&E Int. 44 (2), 216-225 (2011).
- Lugin, S. Detection of hidden defects by lateral thermal flows. Ndt&E Int. 56, 48-55 (2013).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning laser-line thermography and laser-spot thermography. Meas. Sci. Technol. 22 (3), (2011).
- Pech-May, N. W., Oleaga, A., Mendioroz, A., Salazar, A. Fast Characterization of the Width of Vertical Cracks Using Pulsed Laser Spot Infrared Thermography. Journal of Nondestructive Evaluation. 35 (2), 22 (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. SPIE 9761. Douglass, M. R., King, P. S., Lee, B. L. , Spie-Int Soc Optical Engineering. (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. WCNDT 2016. , 6 (2016).
- Mandelis, A. Diffusion-Wave Fields: mathematical methods and Green functions. , Springer-Verlag. (2001).
- Almond, D., Patel, P. Photothermal Science and Techniques. 10, Chapman & Hall. (1996).
- Salazar, A. Energy propagation of thermal waves. Eur. J. Phys. 27 (6), 1349-1355 (2006).
- Bennett, C. A., Patty, R. R. Thermal wave interferometry: a potential application of the photoacoustic effect. Appl. Opt. 21 (1), 49-54 (1982).
- Busse, G. Stereoscopic depth analysis by thermal wave transmission for nondestructive evaluation. Appl. Phys. Lett. 42 (4), 366 (1983).
- Holtmann, N., Artzt, K., Gleiter, A., Strunk, H. P., Busse, G. Iterative improvement of Lockin-thermography results by temporal and spatial adaption of optical excitation. Qirt J. 9 (2), 167-176 (2012).
- Pribe, J. D., Thandu, S. C., Yin, Z., Kinzel, E. C. Toward DMD illuminated spatial-temporal modulated thermography. Proc. SPIE 9861. , (2016).
- Ravichandran, A. Spatial and temporal modulation of heat source using light modulator for advanced thermography. , Missouri University of Science and Technology. (2015).
- DLP 0.55 XGA Series 450 DMD. , TexasInstruments. (2015).
- Application Note - DLP System Optics. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?baseLiteratureNumber=dlpa022&keyMatch=dlpa022&tisearch=Search-EN-Everything (2010).
- DLP LightCommander Control Software - User Manual. , LogicPD. Available from: https://support.logicpd.com/ProductDownloads/LegacyProducts/DLPLightCommander.aspx?_sw_csrfToken=318b0448 (2011).
- White Paper - Laser Power Handling for DMDs. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?literatureNumber=dlpa027&fileType=pdf (2012).
- Moench, H., et al. High-power VCSEL systems and applications. Proc. SPIE 9348. , (2015).
