

Summary
हम निरीक्षण और एमईएमएस उपकरणों के लक्षण वर्णन के लिए एक कॉम्पैक्ट डिजिटल प्रतिबिंब होलोग्राफिक प्रणाली (CDHM) प्रस्तुत करते हैं। प्राकृतिक ज्यामितीय बढ़ाई उपलब्ध कराने के एक diverging इनपुट लहर का उपयोग कर एक लेंस कम डिजाइन प्रदर्शन किया है। दोनों स्थिर और गतिशील के अध्ययन प्रस्तुत कर रहे हैं।
Introduction
माइक्रो और नैनो वस्तुओं की मेट्रोलोजी दोनों उद्योग और शोधकर्ताओं के लिए बहुत महत्व का है। दरअसल, वस्तुओं के miniaturization ऑप्टिकल मैट्रोलोजी के लिए एक नई चुनौती का प्रतिनिधित्व करता है। माइक्रो इलेक्ट्रो मैकेनिकल सिस्टम (एमईएमएस) आम तौर पर परिभाषित कर रहे हैं विद्युत प्रणाली छोटी हो गया है और आम तौर पर इस तरह के सूक्ष्म सेंसर, माइक्रो actuators, माइक्रोइलेक्ट्रॉनिक और microstructures के रूप में घटक शामिल हैं। यह इस तरह के जैव प्रौद्योगिकी, चिकित्सा, संचार और संवेदन 1 के रूप में विविध क्षेत्र में कई आवेदन मिल गया है। हाल ही में, बढ़ती जटिलता के साथ ही परीक्षण वस्तु के प्रगतिशील miniaturization एमईएमएस के लिए उपयुक्त लक्षण वर्णन तकनीक के विकास के लिए कॉल की सुविधा है। इन जटिल माइक्रोसिस्टम्स के उच्च throughput विनिर्माण विशेषता मानकों और प्रक्रिया की स्थिति की वजह से 2 संबंधित दोषों यों की, उन्नत इनलाइन माप तकनीक के कार्यान्वयन की आवश्यकता है। उदाहरण के लिए, ज्यामितीय परम का विचलनएक एमईएमएस डिवाइस में eters सिस्टम गुण को प्रभावित करता है और विशेषता किया जाना है। इसके अलावा, उद्योग में इस तरह के पूर्ण तीन आयाम (3 डी) मैट्रोलोजी, बड़े फाई देखने के लिए, उच्च इमेजिंग संकल्प की वृद्धावस्था, और वास्तविक समय विश्लेषण के रूप में उच्च संकल्प माप प्रदर्शन की आवश्यकता है। इस प्रकार, यह एक विश्वसनीय गुणवत्ता नियंत्रण और निरीक्षण की प्रक्रिया को सुनिश्चित करने के लिए आवश्यक है। इसके अलावा, यह माप प्रणाली की आवश्यकता है एक उत्पादन लाइन पर आसानी से लागू है और इस तरह अपेक्षाकृत कॉम्पैक्ट मौजूदा infrastructures पर स्थापित करने के लिए किया जाना है।
होलोग्रफ़ी है, जो पहले गेबर 3 से पेश किया गया था, एक तकनीक है कि एक संदर्भ और एक सहज माध्यम में एक वस्तु लहर के बीच हस्तक्षेप रिकॉर्डिंग से एक वस्तु का पूरा मात्रात्मक जानकारी की वसूली की अनुमति देता है। इस प्रक्रिया रिकॉर्डिंग के रूप में जाना जाता है के दौरान, आयाम, चरण और एक क्षेत्र के ध्रुवीकरण माध्यम में जमा हो जाती है। फिर वस्तु लहर क्षेत्र मुझ पर संदर्भ बीम भेजने के द्वारा ठीक किया जा सकताdium, एक प्रक्रिया होलोग्राम के ऑप्टिकल पढ़ने के रूप में जाना जाता है। चूंकि एक पारंपरिक डिटेक्टर केवल लहर की तीव्रता रिकॉर्ड, होलोग्रफ़ी पिछले पचास वर्षों में बहुत रुचि का विषय रहा है, क्योंकि यह बिजली के क्षेत्र पर अतिरिक्त जानकारी के लिए पहुँच देता है। हालांकि, पारंपरिक होलोग्रफ़ी के कई पहलुओं को यह उद्योग अनुप्रयोगों के लिए अव्यावहारिक हैं। दरअसल, सहज सामग्री महंगी होती हैं और रिकॉर्डिंग प्रक्रिया आम तौर पर स्थिरता के एक उच्च डिग्री की आवश्यकता है। इस तरह का आरोप लगाया युग्मित उपकरणों (सीसीडी) के रूप में उच्च संकल्प कैमरा सेंसर के क्षेत्र में अग्रिम डिजिटल मैट्रोलोजी के लिए एक नया दृष्टिकोण खोल दिया है। उन तकनीकों में से एक डिजिटल होलोग्रफ़ी 4 के रूप में जाना जाता है। डिजिटल होलोग्रफ़ी (डीएच) में, होलोग्राम एक कैमरा (रिकॉर्डिंग मध्यम) पर दर्ज की गई है और संख्यात्मक प्रक्रियाओं चरण और तीव्रता जानकारी को फिर से संगठित करने के लिए इस्तेमाल कर रहे हैं। के रूप में दिखाया गया फाई रिकॉर्डिंग और पुनर्निर्माण: पारंपरिक होलोग्रफ़ी साथ के रूप में, परिणाम दो मुख्य प्रक्रियाओं के बाद प्राप्त किया जा सकताआंकड़ा 1। हालांकि, अगर रिकॉर्डिंग पारंपरिक होलोग्रफ़ी के समान है, पुनर्निर्माण केवल संख्यात्मक 5 है। संख्यात्मक पुनर्निर्माण प्रक्रिया चित्रा 2 में दिखाया गया है। दो प्रक्रियाओं के पुनर्निर्माण की प्रक्रिया में शामिल रहे हैं। सबसे पहले, वस्तु लहर क्षेत्र होलोग्राम से लिया गया है। होलोग्राम एक संख्यात्मक संदर्भ लहर होलोग्राम विमान में वस्तु wavefront प्राप्त करने के साथ गुणा किया जाता है। दूसरे, जटिल वस्तु wavefront संख्यानुसार छवि विमान को प्रचारित किया जाता है। हमारी प्रणाली में, इस कदम कनवल्शनफ़िल्टर्स विधि 6 का उपयोग किया जाता है। खंगाला प्राप्त क्षेत्र एक जटिल कार्य है और इस प्रकार चरण और तीव्रता ब्याज की वस्तु पर मात्रात्मक ऊंचाई में जानकारी प्रदान निकाला जा सकता है। होलोग्रफ़ी विधि में पूरे फाई वृद्धावस्था जानकारी भंडारण की क्षमता है और तेजी से डाटा प्रोसेसिंग के लिए कंप्यूटर प्रौद्योगिकी का उपयोग प्रयोगात्मक विन्यास में अधिक लचीलापन प्रदान करते हैं और काफी spee में वृद्धिप्रयोगात्मक प्रक्रिया के डी, नई संभावनाओं को खोलने एमईएमएस और माइक्रो सिस्टम 7.8 के लिए एक गतिशील metrological उपकरण के रूप में विकसित करने के लिए डीएच।
चरण विपरीत इमेजिंग में डिजिटल होलोग्रफ़ी का उपयोग अब अच्छी तरह से स्थापित किया गया है और पहले से अधिक दस साल पहले 9 पेश किया गया। दरअसल, डिजिटल होलोग्रफ़ी और माइक्रोस्कोपी के संयोजन से सूक्ष्म उपकरणों की जांच कई अध्ययनों से 10, 11, 12, 13 में किया गया है। उच्च जुटना 14 और कम जुटना 15 स्रोतों के आधार पर कई सिस्टम के साथ ही ज्यामिति 13, 16 के विभिन्न प्रकार, 17 (लाइन में, अक्ष, आम रास्ता बंद ...) प्रस्तुत किया गया है। इसके अलावा, लाइन में डिजिटल होलोग्रफ़ी एमईएमएस डिवाइस 18, 19 के लक्षण वर्णन में पहले से इस्तेमाल किया गया है। हालांकि, उन प्रणालियों, आम तौर पर लागू करने के लिए मुश्किल और भारी हैं उन्हें औद्योगिक अनुप्रयोगों के लिए अनुपयुक्त बना रही है। इस अध्ययन में, हम दूर AXI पर आधारित एक कॉम्पैक्ट, सरल और लेंस मुक्त प्रणाली का प्रस्ताववास्तविक समय एमईएमएस निरीक्षण और लक्षण वर्णन के लिए डिजिटल होलोग्रफ़ी सक्षम है। कॉम्पैक्ट डिजिटल होलोग्राफिक माइक्रोस्कोप (CDHM) एक लेंस कम डिजिटल होलोग्राफिक प्रणाली विकसित की है और सूक्ष्म आकार specular वस्तुओं के 3 डी आकृति विज्ञान प्राप्त करने के लिए पेटेंट कराया है। हमारी प्रणाली, एक 10 मेगावाट, अत्यधिक स्थिर, तापमान नियंत्रित डायोड लेजर 638 एनएम पर काम कर रही एक मोनो मोड फाइबर में युग्मित है। के रूप में 3 चित्र में दिखाया, diverging बीम फाइबर से उत्पन्न एक संदर्भ और एक बीम फाड़नेवाला द्वारा एक वस्तु बीम में विभाजित है। संदर्भ किरण पथ एक झुका दर्पण बंद अक्ष ज्यामिति का एहसास करने के शामिल हैं। वस्तु बीम बिखरे हुए हैं और नमूना से परिलक्षित होता है। दो मुस्कराते हुए सीसीडी होलोग्राम देने पर हस्तक्षेप। हस्तक्षेप पैटर्न छवि पर अंकित एक स्थानिक वाहक कहा जाता है और केवल एक ही छवि के साथ मात्रात्मक चरण जानकारी की वसूली परमिट है। संख्यात्मक पुनर्निर्माण एक आम फूरियर और स्टेशन के रूप में कनवल्शनफ़िल्टर्स कलन विधि का उपयोग किया जाता हैटेड पहले। लेंस-कम विन्यास कई इसे आकर्षक बनाने के फायदे हैं। के रूप में कोई लेंस इस्तेमाल कर रहे हैं, इनपुट किरण अपसारी लहर एक प्राकृतिक ज्यामितीय बढ़ाई प्रदान करने और इस प्रकार प्रणाली संकल्प में सुधार है। इसके अलावा, यह ठेठ ऑप्टिकल सिस्टम में आई aberrations के लिए स्वतंत्र है। चित्रा 3 बी में देखा जा सकता है, इस प्रणाली कॉम्पैक्ट (55x75x125 3 मिमी), हल्के (400 ग्राम) बनाया जा सकता है, और इस तरह आसानी से औद्योगिक उत्पादन लाइनों में एकीकृत किया जा सकता है।
Subscription Required. Please recommend JoVE to your librarian.
Protocol
1. मापन की प्रारंभिक तैयारी
नोट: प्रयोग के लिए इस्तेमाल नमूना एक एमईएमएस इलेक्ट्रोड है। सोने इलेक्ट्रोड एक सिलिकॉन वेफर प्रक्रिया लिफ्ट बंद के प्रयोग पर गढ़े हैं। नमूना 1 मिमी की अवधि के साथ आवधिक संरचनाओं (इलेक्ट्रोड) के साथ एक 18 मिमी x 18 मिमी वेफर है
- प्रणाली का उपयोग करने से पहले लॉगबुक में प्रवेश करें।
- कंप्यूटर, लेजर और अनुवाद चरण बिजली चालू करें।
- एमईएमएस इलेक्ट्रोड / माइक्रो डायाफ्राम नमूना रखें।
- एक चिमटी से नोचना का उपयोग नमूना धारक के बीच में एमईएमएस नमूना रखें।
- किरण पथ में इलेक्ट्रोड की स्थिति के लिए नमूना धारक को समायोजित करें। देखने का अधिकतम माप क्षेत्र कैमरा सेंसर आकार से परिभाषित किया गया है। यह 2.3 मिमी x 1.8 मिमी की एक आयत है।
- ऊर्ध्वाधर दिशा मोटर चालित मंच का उपयोग, प्रणाली approximatively 1.5 सेमी नमूना से दूर ले जाते हैं।
2. सॉफ्टवेयर सेटिंग्स समायोजन
- 3DView खोलेंसॉफ्टवेयर। 3DView हमारे घर में सी ++ में विकसित कार्यक्रम है।
- प्रयोग के लिए उचित कैमरे का चयन करने के लिए इमेजिंग स्रोत बटन पर क्लिक करें। मोनोक्रोम सीसीडी कैमरा चुनें। इस सेटअप में एक रंग कैमरे से बचने के बाद से एक एक रंग लेजर डायोड प्रयोग किया जाता है। इसके अतिरिक्त, पिक्सल के एक ही नंबर के लिए, संकल्प कम जब रंग कैमरों का उपयोग किया जाएगा।
- डिवाइस सेटिंग्स टैब में, का चयन Y800 (1280 x 960) वीडियो प्रारूप और प्रति सेकंड 15 फ्रेम दर वीडियो।
- कैमरा शुरू करने के लिए पीले रंग खेलने के बटन पर क्लिक करें। अंकित फ्रिंज पैटर्न (होलोग्राम) के साथ वस्तु की एक छवि दिखाई देनी चाहिए।
- छवि के संतृप्ति से बचने के लिए अगर जरूरत इष्टतम लाभ और जोखिम के मापदंडों को समायोजित करें।
- लाइव वीडियो खिड़की कैमरा देखने का प्रयोग, नमूना पर जांच करने के लिए सटीक क्षेत्र का चयन करने के लिए नमूना स्थिति को समायोजित।
- ओपन सेटिंग टैब।
- विन्यास टैब में, सतह के प्रकार (चिंतनशील या पारदर्शी), ला के तरंग दैर्ध्य का चयनकैमरे की सेवा, और पिक्सेल आकार। लेजर एक डायोड लेजर 633 एनएम पर काम कर रहा है। कैमरे के पिक्सेल आकार 4,650 एनएम है। नमूना एक specular एमईएमएस इलेक्ट्रोड डिवाइस इसलिए चिंतनशील मोड का चयन किया जाना चाहिए है।
नोट: CDHM विन्यास केवल चिंतनशील सतहों मापा जा करने की अनुमति देता है। हालांकि, इस सॉफ्टवेयर को भी पारदर्शी नमूनों को मापने के लिए जब एक अलग डिजिटल होलोग्रफ़ी प्रणाली 13 प्रयोग किया जाता है के लिए इस्तेमाल किया जा सकता है। इस सेटिंग में बदलाव चरण से ऊंचाई गणना के फार्मूले में बदलाव किया। दरअसल, ऑप्टिकल पथ अंतर गणना पारदर्शी नमूने के लिए थोड़ा अलग रूप में यह वस्तु अपवर्तनांक भी शामिल है। - कनवल्शनफ़िल्टर्स पुनर्निर्माण एल्गोरिथ्म चुनें और शून्य करने के लिए पुनर्निर्माण दूरी निर्धारित किया है। 1 या 2 के पुनर्निर्माण कदम चुनें।
नोट: पुनर्निर्माण दूरी पैरामीटर बाद में तीव्रता छवि होलोग्राम से प्राप्त विचार और ऑटो फोकस के उपयोग से परिभाषित किया जा सकता है। पुनर्निर्माण के कदम की संख्या को परिभाषित करता हैFresnel अभिन्न को लागू करने और किरण प्रचार अनुकरण करने के लिए इस्तेमाल कदम। पहली विधि के अभिन्न अंग के रूप में एक बार ही फूरियर रूपांतरण का मूल्यांकन। 2 के एक कदम दो बार अभिन्न मूल्यांकन करेंगे। इस ग्रिड रिक्ति में और अधिक लचीलापन कहते हैं, लेकिन computationally कम कुशल 20 है। - पोस्ट प्रोसेसिंग टैब में, unwrapping एल्गोरिथ्म आवश्यक चयन अंतिम unwrapped छवि को पाने के लिए। गुणवत्ता का चयन एल्गोरिथ्म मैप किया।
नोट: सॉफ्टवेयर में, गोल्डस्टीन और गुणवत्ता के बीच चुनाव मैप एल्गोरिथ्म बनाया जा सकता है। बाद में unwrapping मजबूत और तेजी से स्थानिक चरण दिखाया गया है। गुणवत्ता मैप किया एल्गोरिथ्म निर्देशित चरण 21 में वर्णित के रूप में unwrapping पर आधारित है।
- विन्यास टैब में, सतह के प्रकार (चिंतनशील या पारदर्शी), ला के तरंग दैर्ध्य का चयनकैमरे की सेवा, और पिक्सेल आकार। लेजर एक डायोड लेजर 633 एनएम पर काम कर रहा है। कैमरे के पिक्सेल आकार 4,650 एनएम है। नमूना एक specular एमईएमएस इलेक्ट्रोड डिवाइस इसलिए चिंतनशील मोड का चयन किया जाना चाहिए है।
3. डाटा अधिग्रहण
- फूरियर फूरियर स्पेक्ट्रम विंडो खोलने के लिए आइकन प्रेस। एक 0 आदेश और दो +1, -1 के आदेश प्रकट करना चाहिए। यदि यह मामला नहीं है, जाँच करें कि नमूना सही स्थिति में है, और एक लाभ को समायोजितडी जोखिम समय फिर से।
- लाइव माप मोड बंद करो। फिल्टर उपकरण का उपयोग करके विवर्तित आदेश (सकारात्मक या नकारात्मक आवृत्ति) में से एक का चयन करें। चयनित क्षेत्र के लिए काफी बड़ी है, ताकि सभी आवृत्तियों चरण पुनर्प्राप्ति के लिए आवश्यक मौजूद हैं होना चाहिए। फिर से जीना मोड पर स्विच।
नोट: नकारात्मक आदेश के चुनाव अभी अंतिम परिणाम, यानी चरण के हस्ताक्षर को प्रभावित करेगा, अंतिम 3 डी छवि उलटा हो जाएगा। - चरण विंडो खोलें। जाँच करें कि unwrapped मोड सक्षम नहीं है। वस्तु लिपटे किनारे के साथ अंकित की ग्रे चरण की छवि दिखाई देनी चाहिए।
- मोटर खड़ी मंच का उपयोग चरण छवि में किनारे की संख्या को कम करने के लिए। केवल 1 या 2 किनारे छवि पर छोड़ दिया जाता है, जब मोटर चालित चरण बंद करो।
नोट: सिस्टम इंटरफेरोमेट्री पर आधारित है। इस प्रकार यह कंपन के प्रति संवेदनशील है। Z दिशा मोटर चालित चरण जाने के बाद, उपयोगकर्ता पहले लिपटे चरण की छवि agai प्रतीत होता है 1 या 2 सेकंड इंतजार करना चाहिएएन। यह भी एक स्थिर चरण छवि को पाने के लिए माप के दौरान कंपन से बचने के लिए महत्वपूर्ण है। - सबसे अच्छा पुनर्निर्माण दूरी लगाने के लिए ऑटो फोकस 22 बटन पर क्लिक करें। एक ऑटोफोकस कई बार इष्टतम पुनर्निर्माण दूरी दृष्टिकोण करने के लिए जब तक तीव्रता छवि तेज और स्पष्ट प्रतीत होता है का उपयोग करने की आवश्यकता हो सकती है। ऑटोफोकस 22 में वर्णित के रूप में एक कुशल और प्रभावी समय कोणीय स्पेक्ट्रम पद्धति पर आधारित है।
नोट: फोकस स्लाइडर पट्टी ठीक समायोजन के लिए इस्तेमाल किया जा सकता है। फिर, वर्तमान पुनर्निर्माण दूरी रिकॉर्ड करने के लिए केंद्र फोकस बटन पर क्लिक करें। यह कभी कभी लगता है कि सबसे अच्छा फोकस ऑटोफोकस विकल्प के साथ नहीं पाया जाता है। इस मामले में, मैन्युअल इनपुट पुनर्निर्माण दूरी सबसे अच्छा ध्यान लगाने के लिए। - unwrapping बटन पर क्लिक करके unwrapped चरण छवि को देखने के unwrapped मोड सक्षम करें।
4. डेटा दृश्य और विश्लेषण स्थिर माप के लिए
- 3 डी छवि विंडो खोलें अंतिम 3 डी देखने के लिएनमूना की छवि। उपलब्ध विकल्पों का उपयोग अंतिम परिणाम निरीक्षण करने के लिए (घुमाएगी, रंग नक्शे, पैमाने पर प्रदर्शन ...)।
- टाइल Windows बटन पर क्लिक करें रूप में गैर रखे विंडो की व्यवस्था है और सभी मापन खिड़कियों प्रदर्शित करने के लिए।
- unwrapped चरण छवि पर ब्याज की एक क्षेत्र पर एक पंक्ति आकर्षित करने के लिए लाइन शासक का प्रयोग करें। लाइन साजिश विंडो में, हित के क्षेत्र के एक क्रॉस अनुभागीय प्रोफ़ाइल साजिश मनाया जा सकता है। दो हरे रंग की लाइन मार्कर का उपयोग वस्तु (चित्रा 5) की एक अनुमानित ऊंचाई निकालने के लिए।
सतह खुरदरापन भी नमूने के फ्लैट शीर्ष भाग पर प्राप्त की जा सकती है। - .JPEG प्रारूप में अंतिम चरण में छवि को बचाने के लिए अन्य सॉफ्टवेयर के लिए यह आयात करने के लिए अगर जरूरत है।
5. नमूना और गतिशील माप के लिए डेटा विश्लेषण की तैयारी
- एक हीटिंग स्टेशन प्लेट पर सूक्ष्म डायाफ्राम रखें। नमूना थाली से नहीं हटाया जाएगा जब तक प्रयोग समाप्त होता है।
- माइकर के एक होलोग्राम रिकॉर्डओ डायाफ्राम प्रक्रिया धारा 2 और 3. यह विरूपण विश्लेषण के लिए एक संदर्भ के रूप में इस्तेमाल किया जाएगा में ऊपर वर्णित का पालन करके परिवेश के तापमान पर।
- कंप्यूटर पर चरण डेटा को बचाओ।
- प्रयोगशाला हीटिंग थाली चालू करें।
- तापमान घुंडी का प्रयोग, 300 डिग्री सेल्सियस से 50 डिग्री सेल्सियस से 50 डिग्री सेल्सियस के चरणों में तापमान बदलती हैं। प्रत्येक तापमान कदम के लिए, चरण नक्शा छवि .JPEG प्रारूप में बचाने के लिए।
- दूसरे चरण नक्शा विरूपण डेटा प्राप्त करने के लिए दर्ज की गई प्रारंभिक से परिवेश के तापमान चरण नक्शा घटाएँ।
नोट: इस पोस्ट प्रसंस्करण कदम साधारण matlab कोड के साथ महसूस किया जा सकता है। विभिन्न चरणों प्राप्त MATLAB में लोड कर रहे हैं और सरल मैट्रिक्स घटाव किया जाता है। फिर अलग अलग चरणों विरूपण के पार अनुभागीय भूखंडों प्राप्त किया जा सकता है।
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
ऊपर वर्णित प्रोटोकॉल का निरीक्षण किया और एमईएमएस और माइक्रो डिवाइसेस CDHM प्रणाली का उपयोग कर चिह्नित करने के लिए डिजाइन किया गया था। हमारी प्रणाली में, एक मोनो मोड फाइबर एक डायोड लेजर एक 633 एनएम तरंगदैर्ध्य पर परिचालन के लिए युग्मित है। diverging बीम विन्यास के कारण, यह आदेश एक होलोग्राम कि खंगाला जा सकता प्राप्त करने के लिए वस्तु बीम और संदर्भ किरण पथ मैच के लिए महत्वपूर्ण है। इस प्रणाली के संबंध में नमूने के सावधान ऊर्ध्वाधर स्थिति के माध्यम से हासिल की है। गणना लिपटे चरण छवि में, किनारे की संख्या प्रणाली ऊंचाई स्थिति बदलने से एक न्यूनतम करने के लिए कम है। यह सुनिश्चित करता है। कि ऑप्टिकल रास्तों मिलान कर रहे हैं चित्रा 4 परिणाम एक माप नमूना के समुचित अक्षीय स्थिति के बाद CDHM का उपयोग करने से प्राप्त चलता। डेटा एक ही छवि से वास्तविक समय में प्राप्त की है। इस प्रयोग में, एक USAF विभिन्न उतार-काल की झंझरी पैटर्न में मिलकर लक्ष्य एक नमूने के रूप में चुना है।जैसा कि ऊपर बताया गया है, चरण नक्शा (चित्रा -4 ए) एकल छवि होलोग्राम से निकाला जाता है। एक खास पैटर्न की एक पंक्ति साजिश चित्रा -4 ए में दिखाया गया है। पीले रंग की लाइन (चित्रा 4 ए) नमूना पर क्रॉस सेक्शन स्थान का प्रतिनिधित्व करता है। दो हरे रंग मार्कर लाइनों नमूना ऊंचाई के निरपेक्ष मूल्य का अनुमान किया जाता है। आदेश डिजिटल होलोग्राफिक प्रणाली के परिणामों को मान्य करने के लिए, नमूना के एक परमाणु बल सूक्ष्मदर्शी (AFM) जांच की जाती है। एक ही नमूना क्षेत्र के एक क्रॉस सेक्शन चित्रा 4 बी में दिखाया गया है। एक ही संरचना के लिए, 2.1 एनएम की ऊंचाई अंतर AFM और CDHM माप के बीच पाया जाता है। इस प्रकार, दो तरीकों के बीच तुलना को दर्शाता है CDHM की क्षमता।
विशेष रूप से एक एमईएमएस डिवाइस को चिह्नित करने के लिए, एक एमईएमएस इलेक्ट्रोड के 3 डी स्थिर जांच की जाती है। डिवाइस सोने इलेक्ट्रोड Patt के साथ सिलिकॉन से बना हैएक प्रक्रिया लिफ्ट बंद का उपयोग erned। आम तौर पर, सिलिकॉन आधारित एमईएमएस ऐसे नक़्क़ाशी के रूप में संवेदनशील तरीकों का उपयोग कर या प्रक्रिया लिफ्ट बंद गढ़े हैं। दोनों ही मामलों में, निर्माण की प्रक्रिया के दौरान नमूना आकृति विज्ञान के परिवर्तन यों की क्षमता बहुत महत्व का है। चित्रा 5 इस नमूने के लिए माप परिणाम से पता चलता। नमूने के पूर्ण 3 डी आकृति विज्ञान मनाया जा सकता है। एक क्रॉस सेक्शन लाइन (चित्रा 5 ए) साजिश गहराई नक्शा है कि निरीक्षण के लिए इस्तेमाल किया जा सकता है पता चलता है। चैनल की गहराई 632 एनएम हो पाया है और इलेक्ट्रोड के बीच पार्श्व दूरी भी दिखा रहा है कि यह नमूना की एक पूरी मात्रात्मक 3 डी विश्लेषण उपलब्ध कराने में सक्षम है CDH द्वारा प्रदान की जाती है। अन्य आयाम (चित्रा 5 ब) में एक भूखंड इलेक्ट्रोड साबित करना है कि CDHM भी खुरदरापन माप के लिए उपयुक्त है की सतह खुरदरापन को दर्शाती है।
एमईएमएस लक्षण वर्णन में स्टेटिक अनुप्रयोगों जी के हैंreat मूल्य है, लेकिन दिलचस्प प्रक्रियाओं के सबसे गतिशील निरीक्षण की आवश्यकता है। उपयुक्त रिकॉर्डिंग तरीकों का चयन करके, CDHM प्रणाली दोनों स्थिर और गतिशील स्थितियों के लिए निरीक्षण और लक्षण माइक्रो डिवाइसेस में सक्षम है। चित्रा 6 एक माइक्रो अलग तापमान पर प्राप्त डायाफ्राम के 3 डी डेटा की एक श्रृंखला से पता चलता है। डायाफ्राम एक सोइ (इन्सुलेटर पर सिलिकॉन) वेफर नमूना पर एक पतली प्लेट संबंध द्वारा निर्मित किया गया था। नमूना एक गर्म थाली पर रखा गया है। आदेश थर्मल विरूपण को मापने के लिए, तापमान 50 डिग्री सेल्सियस में विविध है 50 डिग्री सेल्सियस से शुरू और कदम 300 डिग्री सेल्सियस तक। होलोग्राम के संख्यात्मक पुनर्निर्माण प्रत्येक तापमान के लिए किया जाता है। परिवेश के तापमान पर होलोग्राम और चरण पहले से रिकॉर्ड किया गया है। यह एक संदर्भ चरण के रूप में प्रयोग किया जाता है। विकृत राज्य (थर्मल लोड) और संदर्भ राज्य (परिवेश तापमान) के घटाव विरूपण नक्शे देता है। इस प्रकार एक डी के थर्मल विरूपण से भरा क्षेत्र विश्लेषण iaphragm प्राप्त की है। चित्रा 6G अलग तापमान के लिए विरूपण प्रकाश डाला गया। इस मामले में, लाइन भूखंडों पता चलता है कि माप स्थिर माप के दौरान प्राप्त परिणामों की तुलना में महत्वपूर्ण खुरदरापन दिखा।

चित्रा 1. डिजिटल होलोग्रफ़ी रिकॉर्डिंग और पुनर्निर्माण प्रक्रिया योजना। यह आंकड़ा एक वस्तु के तीन आयामी छवि प्राप्त करने के लिए दो चरणों की प्रक्रिया का विस्तार से पता चलता है। रिकॉर्डिंग प्रक्रिया और उसके एवज में होलोग्राम के एक कार्टून में दिखाया गया है। होलोग्राम, वस्तु के आयाम और चरण (सापेक्ष 2π) से निकाले जाते हैं। चरण 2π अस्पष्टता को दूर करने के unwrapped है। 3 डी पुनर्निर्माण तब किया जाता है। यह आंकड़ा का एक बड़ा संस्करण देखने के लिए यहां क्लिक करें।
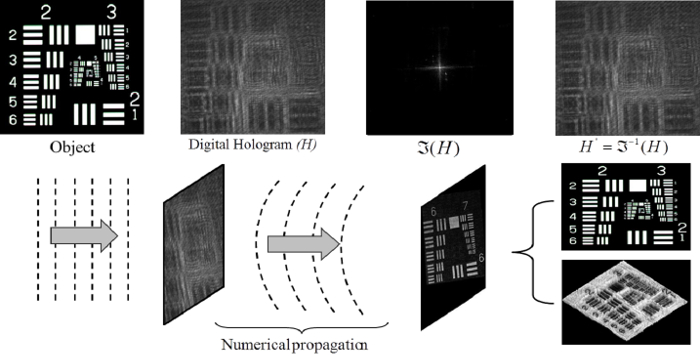
चित्रा 2 पुनर्निर्माण की प्रक्रिया की विस्तृत योजना। यह आंकड़ा पुनर्निर्माण की प्रक्रिया इस योजना का एक योजनाबद्ध दिखाता है। डिजिटल होलोग्राम दर्ज की गई है और फास्ट फूरियर रूपांतरण (FFT) की छवि को किया जाता है। स्पेक्ट्रम में उपयोगी जानकारी चयन करने के बाद, छवि फूरियर वापस तब्दील हो जाता है। तब संदर्भ बीम और होलोग्राम के प्रचार-प्रसार के संख्यात्मक पीढ़ी चरण और वस्तु के आयाम को पुनः प्राप्त करने के लिए स्वतंत्र रूप से। नकली है कृपया यहाँ यह आंकड़ा का एक बड़ा संस्करण देखने के लिए क्लिक करें।

चित्रा 3. CDHM सेटअप के योजनाबद्ध। यह आंकड़ा CDHM स्थापना के एक योजनाबद्ध प्रतिनिधित्व (पता चलता है

चित्रा 4. CDHM और परमाणु सेना माइक्रोस्कोप (AFM) एक अमेरिकी वायु सेना के लक्ष्य की ऊंचाई माप के बीच तुलना। यह आंकड़ा (एक अमेरिकी वायु सेना लक्ष्य सूक्ष्म संरचना CDHM (ए) और एक परमाणु बल सूक्ष्मदर्शी का उपयोग कर प्राप्त से लाइन भूखंडों से पता चलता AFM ) (बी)। यह आंकड़ा का एक बड़ा संस्करण देखने के लिए यहां क्लिक करें।

एक एमईएमएस एल के चित्रा 5. 3 डी प्रोफाइल और लाइन साजिश ectrode उपकरणों। एक सिलिकॉन एमईएमएस इलेक्ट्रोड CDHM का उपयोग कर डिवाइस के मापन का परिणाम है। एक्स दिशा (ए) में एक विशेष पार अनुभाग में नमूने की गहराई का अनुमान किया हरी मार्करों और y दिशा (बी) और पूरे क्षेत्र छवि 3 डी परिणाम (सी) दिखाने के साथ लाइन साजिश है। एक बड़ा देखने के लिए यहां क्लिक करें यह आंकड़ा का संस्करण।

चित्रा 6 थर्मल लोड के तहत एक माइक्रो डायाफ्राम के विकार का अध्ययन। चित्र थर्मल लोड (वायुसेना) और एक विशेष पार अनुभाग (G) पर विरूपण के विकास दिखा लाइन साजिश के तहत अलग से एक माइक्रो डायाफ्राम की 3 डी छवियों को दिखाने के विरूपण।टी = "_blank"> यह आंकड़ा का एक बड़ा संस्करण देखने के लिए यहां क्लिक करें।
Subscription Required. Please recommend JoVE to your librarian.
Discussion
इस समीक्षा में, हम सही ढंग से डिजिटल होलोग्रफ़ी पर भरोसा एक कॉम्पैक्ट प्रणाली का उपयोग करके विभिन्न एमईएमएस उपकरणों की मात्रात्मक आकृति विज्ञान की वसूली के लिए एक प्रोटोकॉल प्रदान करते हैं। दोनों स्थिर और गतिशील मोड में एमईएमएस लक्षण वर्णन प्रदर्शन किया है। एक माइक्रो चैनल एमईएमएस के मात्रात्मक 3 डी डेटा प्राप्त की है। आदेश में इस प्रणाली की सटीकता को मान्य करने के लिए, परिणाम CDHM और AFM के बीच तुलना की गई है। अच्छे समझौते जिसका अर्थ है कि डिजिटल होलोग्रफ़ी 3 डी इमेजिंग के लिए एक विश्वसनीय तकनीक हो सकता पाया जाता है। परिणाम से संकेत मिलता है कि इस प्रणाली के 10 एनएम गहराई संकल्प करने में सक्षम है। इसके अलावा, सूक्ष्म चैनल पर प्राप्त परिणाम बताते हैं कि प्रणाली एमईएमएस लक्षण वर्णन में इस्तेमाल किया जा सकता है के रूप में नमूना की आकृति विज्ञान एमईएमएस निर्माण की प्रक्रिया के दौरान नियंत्रित किया जा सकता है। इसके अतिरिक्त, बढ़ाई CDHM का उपयोग कर प्राप्त क्या एमईएमएस आकार (4.2X) के लिए इस्तेमाल किया जाना चाहिए के अनुरूप हैं। इस प्रणाली को भी पूरा क्षेत्र माप में सक्षम है। यह एक काफी संपत्ति है जब कॉमऐसे confocal माइक्रोस्कोपी के रूप में तकनीक को आम तौर पर एमईएमएस निरीक्षण के लिए प्रयोग किया जाता है, जो लंबे समय स्कैनिंग माप की आवश्यकता को तराशना। इसके अलावा, सिस्टम के पार्श्व संकल्प आसानी से हो सकता है एक यूवी लेजर के लिए लाल डायोड लेजर बदलकर में सुधार होगा। अन्त में, प्रणाली की उच्च संवेदनशीलता खुरदरापन माप सक्षम बनाता है।
एक माइक्रो डायाफ्राम पर गतिशील माप से पता चलता है कि CDHM एमईएमएस उपकरणों में विकृति का निरीक्षण करने के लिए जब थर्मल या बिजली के लोड हो रहा है लागू किया जाता है एक उपयुक्त उपकरण है। एक डबल जोखिम विधि का प्रयोग विरूपण नक्शा बनाने के लिए, एक माइक्रो डायाफ्राम के गतिशील विरूपण अध्ययन किया जाता है। एक देख सकते हैं कि डायाफ्राम आकार को ध्यान से वास्तविक समय में देखा जा सकता है। क्योंकि 3 डी आकृति विज्ञान केवल एक छवि का उपयोग पर गणना की है इस परिणाम के लिए संभव है। लेकिन क्या स्थिर माप के दौरान देखा गया था से अलग है, थर्मल लोड का उपयोग कर गतिशील माप एक असामान्य रूप से किसी न किसी प्रोफ़ाइल से पता चलता है। दरअसल, एक लाइन साजिश श विचार कर सकते हैंकिसी न किसी रूप में चित्रा 6G में ही जब स्थिर माप परिणाम की तुलना में। प्रणाली 10 एनएम के रूप में छोटे संरचना को हल कर सकते हैं, खुरदरापन वस्तु से आ रही हो प्रतीत नहीं होता है। एक संभावित व्याख्या यह हो सकती है कि गर्मी हीटिंग मंच द्वारा उत्पन्न दो तरंगों के बीच हस्तक्षेप perturbs और वस्तु लहर wavefront प्रभावित करता है। इसके अलावा, गतिशील पढ़ाई के विद्युत भार 12 का उपयोग कर एमईएमएस पर CDHM का उपयोग किया गया है और इस खुरदरापन दिखाई देने लगती नहीं है।
प्रोटोकॉल ऐसे नमूने ऊर्ध्वाधर स्थिति, पुनर्निर्माण दूरी की पसंद है, पुनर्निर्माण विधि, एक कंपन मुक्त वातावरण और सीसीडी पर किनारे की गुणवत्ता के रूप में कई महत्वपूर्ण कदम शामिल हैं। एक विश्वसनीय और स्थिर परिणाम सुनिश्चित करने के लिए इन सभी चरणों का सावधानी से किया जाना चाहिए। उदाहरण के लिए, वस्तु किरण पथ संदर्भ से एक है, उदाहरण के लिए के रूप में ही होने की जरूरत है, इस प्रणाली के लिए नमूना दूरी के लिए महत्वपूर्ण हैसीसीडी पर स्पष्ट फ्रिंज पैटर्न प्राप्त करने के लिए। इसके अलावा, संख्यात्मक पुनर्निर्माण दूरी अच्छी तरह से सुनिश्चित करने के लिए कि होलोग्राम छवि विमान में खंगाला है समायोजित किया जाना चाहिए। अन्त में, लेजर की तरंग दैर्ध्य के आधे से अधिक तेज संरचना के साथ एक नमूना अविश्वसनीय चरण परिणाम कारण होगा। दरअसल, एक चरण कूद unwrapping त्रुटियों चरण के कारण प्रकट हो सकते हैं।
इन परिणामों के CDHM की क्षमता एमईएमएस उपकरणों के 3 डी मात्रात्मक गहराई माप प्रदर्शन करने को दर्शाते हैं। दरअसल, परावर्तक सतह एमईएमएस और माइक्रोइलेक्ट्रॉनिक उद्योग में सामना करना पड़ा के रूप में के लिए, CDHM एक पोर्टेबल प्रणाली है कि निस्र्पक और माइक्रोसिस्टम उपकरणों का निरीक्षण करने के साथ ही सीटू प्रक्रिया माप में इस्तेमाल किया जा सकता है। एक मान्यता अध्ययन से पता चलता है कि इस प्रणाली से प्राप्त परिणामों के अत्यधिक विश्वसनीय हैं। CDHM एक बड़े क्षेत्र स्कैन शामिल किया गया है और वास्तविक समय माप किया जा सकता है। यह इस तरह के AFM या confocal माइक्रो के रूप में अन्य तकनीकों की तुलना में एक बड़ा फायदा हैप्रतिलिपि जो समय लगता स्कैनिंग की आवश्यकता है। परिणाम प्रस्तुत करने के लिए इसके अलावा, सिस्टम अन्य एमईएमएस प्रक्रियाओं में बहुमूल्य जानकारी दे सकते हैं। उदाहरण के लिए, यह एमईएमएस उपकरणों 11 में सुनाई देती है मोड निरीक्षण करने के लिए समय औसत और तीव्रता छवियों का उपयोग बहुत तेजी से प्रक्रियाओं को मापने में एक सिद्ध क्षमता है। भविष्य के काम इमेजिंग पर वास्तविक समय में बिजली के लोड के तहत एमईएमएस ब्रैकट के विक्षेपन परिवर्तन ध्यान देना होगा।
Subscription Required. Please recommend JoVE to your librarian.
Materials
| Name | Company | Catalog Number | Comments |
| 2 MP Camera | Imaging Source | DMX 41BU02 | used to record the hologram. 4.65 microns pixel size |
| Motorized X,Y,Z Translation Stage | Zaber Technology | TLS28-M | Holder for the system |
| Beam splitter | Edmund optics | 49-003 | Cube Beam splitter. Separate and recombine the object and reference beam |
| Laser | Micro Laser Systems, Inc. | SRT-F635S-20/OSYS | Diode laser |
| Mirror | Edmund Optics | #43-412-566 | 1" Dia. Protected Gold, λ/20 Flat Zerodur |
| monomode Fiber | Thorlabs | S405-XP | Single Mode Optical Fiber, 400 - 680 nm, Ø 125 µm Cladding |
| Sample holder | Edmund Optics | #39-930 | Ideal Positioning Platform, ±35 mm Travel in Both X and Y |
| Hotplate | Thermolyne Mirak hotplate | Barnstead International HP72935-60 | temperature range 40-370 °C |
| Holoscope Software | d'Optron Pte Ltd | software developed by the NTU researchers |
References
- Maluf, N. An introduction to Microelectromechanical Systems. , Artech House. Boston. (2002).
- Novak, E.
- Gabor, D.
- Schnars, U., Jüptner, W. Direct recording of holograms by a CCD target and numerical reconstruction. Appl. Opt. 33 (2), 179-181 (1994).
- Schnars, U., Jüptner, W. Digital recording and numerical reconstruction of holograms. Meas. Sci. Technol. 13 (9), 85-101 (2002).
- Pedrini, G., Schedin, S., Tiziani, H. Lensless digital holographic interferometry for the measurement of large objects. Opt. Commun. 171 (1-3), 29-36 (1999).
- Dubois, F., Joannes, L., Legros, J. C. Improved three-dimensional imaging with a digital holography microscope with a source of partial spatial coherence. Appl. Opt. 38 (34), 7085-7094 (1999).
- Lei, X., Xiaoyuan, P., Jianmin, M., Asundi, A. K. Studies of digital microscopic holography with applications to microstructure testing. Appl. Opt. 40 (28), 5046-5051 (2001).
- Cuche, E., Bevilacqua, F., Depeursinge, C. Digital holography for quantitative phase-contrast imaging. Opt. Lett. 24 (5), 291-293 (1999).
- Qu, W., Yu, Y., Chee Oi, C., Raj Singh, V., Asundi, A. Quasi-physical phase compensation in digital holographic microscopy. J. Opt. Soc. Am. 26 (9), 2005-2011 (2009).
- Schedin, S., Pedrini, G., Tiziani, H. J., Santoyo, F. M. Simultaneous three-dimensional dynamic deformation measurements with pulsed digital holography. Appl. Opt. 38 (34), 7056-7062 (1999).
- Lei, X., Xiaoyuan, P., Jianmin, M., Asundi, A. K. Development and validation of digital microholo interferometric system for micromechanical testing. Proc. SPIE. 4778, 11-20 (2002).
- Qu, W., Bhattacharya, K., Choo, C. O., Yu, Y., Asundi, A. Transmission digital holographic microscopy based on a beam-splitter cube interferometer. Appl. Opt. 48 (15), 2778-2783 (2009).
- Potcoava, M. C., Kim, M. K. Fingerprint biometry applications of digital holography and low-coherence interferography. Appl. Opt. 48 (34), 9-15 (2009).
- Kolman, P., Chmelìk, R.
- Lee, M., Yaglidere, O., Ozcan, A. Field-portable reflection and transmission microscopy based on lensless holography. Biomed. Opt. Express. 2 (9), 2721-2730 (2011).
- Mico, V., Zalevsky, Z., Garcìa, J. Common-path phase-shifting digital holographic microscopy: a way to quantitative phase imaging and superresolution. Opt. Commun. 281 (17), 4273-4281 (2008).
- Singh, V. R., Miao, J., Wang, Z., Hedge, G. M., Asundi, A. Dynamic characterization of MEMS diaphragm using time averaged in-line digital holography. Opt. Commun. 280 (2), 285-290 (2007).
- Singh, V. R., Anderi, A., Gorecki, C., Nieradko, L., Asundi, A. Characterization of MEMS cantilevers lensless digital holographic microscope. Proc. SPIE. 6995, 69950F-1 (2008).
- Schmidt, J. D. Numerical Simulation of Optical Wave Propagation with Examples in MATLAB. SPIE PRESS BOOK. , (2010).
- Zhao, M., Huang, L., Zhang, Q. C., Su, X. Y., Asundi, A., Qian, K. M. Quality-guided phase unwrapping technique: comparison of quality maps and guiding strategies. Appl. Opt. 50 (33), 6214-6224 (2011).
- Wang, Z., Qu, W., Yang, F., Wen, Y., Asundi, A. A new autofocus method based on angular spectrum method in digital holography. Proc. SPIE. 9449, 2-7 (2015).
