

Summary
Denna metod syftar till att lokalisera vertikala underskriftsfel. Här kopplar vi en laser med en rumslig lysmodulator och utlöser dess videoingång för att värma en provyta bestämt med två antifaserade modulerade linjer samtidigt som vi förvärvar högt upplösta termiska bilder. Felpositionen hämtas från utvärdering av termiska våginterferensminima.
Abstract
Den presenterade metoden används för att lokalisera underskriftsdefekter orienterade vinkelrätt mot ytan. För att uppnå detta skapar vi destruktivt störande termiska vågfält som störs av defekten. Denna effekt mäts och används för att lokalisera defekten. Vi bildar de destruktivt störande vågfälten genom att använda en modifierad projektor. Projektorns originalljusmotor är ersatt med en fiberkopplad högeffektdiodlaser. Dess stråle är formad och inriktad mot projektorns rumsliga ljusmodulator och optimerad för optimal optisk genomströmning och homogen projektion genom att först karakterisera strålprofilen och för det andra korrigera det mekaniskt och numeriskt. En högpresterande infraröd (IR) kamera ställs in i enlighet med den snäva geometriska situationen (inklusive korrigeringar av de geometriska bildförvrängningarna) och kravet på att detektera svaga temperaturoscillationer vid provytan. Datainsamling kan utföras en gång per synkRonisering mellan de enskilda termiska vågfältkällorna, scanningssteget och IR-kameran upprättas med hjälp av en dedikerad experimentell inställning som måste anpassas till det specifika materialet som undersöks. Under data efterbehandling extraheras relevant information om förekomsten av en defekt under provets yta. Den hämtas från den oscillerande delen av den förvärvade värmestrålningen som kommer från den så kallade utplåningslinjen på provytan. Den exakta lokaliseringen av defekten härleds från analysen av den spatiala temporala formen av dessa oscillationer i ett slutsteg. Metoden är referensfri och mycket känslig för förändringar inom värmevågfältet. Hittills har metoden testats med stålprover men gäller även olika material, särskilt temperaturkänsliga material.
Introduction
Den laserprojicerade fototermiska termografiprocessen (LPPT) används för att lokalisera underskriftsfel som är inbäddade i provprovets volym och orienterad övervägande vinkelrätt mot dess yta.
Metoden använder den destruktiva interferensen av två anti-fasade termiska vågfält med samma förlängning och frekvens som visas i figur 1b . I isotropa defektfria material neutraliserar termiska vågor destruktivt ( dvs noll temperaturoscillation) vid symmetriplanet genom koherent överlagring. Vid ett material med en underjordsfel utnyttjar metoden interaktionen mellan de laterala komponenterna ( dvs. i planet) mellan det transienta värmeflödet och denna defekt. Denna interaktion kan mätas i en återskapad oscillerande temperaturöjning vid symmetrilinjen på provytan. Nu är det defektsinnehållande provet skannat av det överliggande termiska vågfältet ochNivån av temperaturförlängning mäts i förhållande till provpositionen. På grund av symmetri är det destruktiva interferensförhållandet nöjd igen när defekten korsar symmetriplanet; Detta gör att vi kan lokalisera defekten mycket noggrant. Eftersom nivån på maximal störning av den destruktiva interferensen korrelerar med djupet hos defekten är det dessutom möjligt att bestämma dess djup genom att analysera temperatursökningen 1 .
LPPT kan tilldelas den aktiva termografiska metoden, en väletablerad icke destruktiv metod där transient uppvärmning genereras aktivt och den resulterande, även övergående temperaturfördelningen mäts via en termisk IR-kamera. I allmänhet är känsligheten av denna metod begränsad till defekter som är orienterade väsentligen vinkelrätt mot det transienta värmeflödet. Eftersom den styrande transienta värmeledningsekvationen är dessutom en parabolisk partiell differeNivelekvationen är värmeflödet i volymen kraftigt dämpat. Som en konsekvens begränsas undersökningsdjupet för den aktiva termografiska metoden till en närliggande region, vanligtvis i millimeterområdet. Två av de vanligaste aktiva termografiteknikerna är pulserad och inlåsningstermografi. De är snabba på grund av plan optisk belysning 2 , men leder till ett övergående värmeflöde vinkelrätt mot ytan. Därför är känsligheten av dessa tekniker begränsad till defekter som övervägande orienterade parallella ( t.ex. delaminationer eller hålrum) till den uppvärmda provytan. En empirisk regel för pulserad termografi säger att "raden av den minsta detekterbara defekten bör vara minst en till två gånger större än dess djup under ytan" 3 . För att öka det effektiva interaktionsområdet mellan en vinkelrätt orienterad defekt ( t.ex. en spricka) och värmeflödet måste värmeflödet riktasändrats. Lokal excitation, exempelvis genom att använda en fokuserad laser med en linjär eller cirkulär punkt, genererar ett värmeflöde med en inplan-komponent som effektivt kan interagera med den vinkelräta defekten 4 , 5 , 6 , 7 .
I den presenterade metoden använder vi också de laterala värmeflödeskomponenterna för att upptäcka underskriftsfel, men vi använder det faktum att termiska vågor kan läggas över, medan defekter, särskilt vertikalt orienterade, stör denna superposition. På så sätt liknar den presenterade metoden en referensfri, symmetrisk och mycket känslig metod, eftersom det är möjligt att detektera artificiella underskriftsfel vid ett bredd / djupförhållande långt under en 8 , 9 . Fram till nu var det svårt att skapa två anti-fasade termiska vågfält som gav tillräcklig energi. Vi uppnådde detta bY koppla en rumslig lysmodulator (SLM) till en högeffektsdiodlaser, vilket gjorde det möjligt för oss att slå samman den höga optiska effekten hos lasersystemet med den rumsliga och tidsmässiga upplösningen av SLM (se figur 2 ) i en kraftprojektor . Värmeböljfälten skapas nu genom fototermisk omvandling av två antifaserade sinusformigt modulerade linjemönster via pixelstyrkan hos den projicerade bilden (se figur 2 , figur 1a ). Detta leder till strukturerad uppvärmning av provytan och resulterar i väldefinierade destruktivt störande termiska vågfält. För att hitta en underjordisk defekt mäts störningen av den destruktiva inferensen som en temperaturoscillation vid ytan med hjälp av en IR-kamera.
Uttrycket termisk våg diskuteras kontroversiellt eftersom termiska vågor inte transporterar energi på grund av värmeförökningens diffusiva karaktär. Fortfarande är det vågliknande beteende när hea Ting med jämna mellanrum, så att vi kan använda likheter mellan verkliga vågor och diffusionsprocesser 10 , 11 , 12 . Således kan en termisk våg förstås som högdämpad i utbredningsriktningen men periodisk över tiden ( Figur Ib ). Den karakteristiska termiska diffusionslängden  Beskrivs härmed av dess materialegenskaper (värmeledningsförmåga k , värmekapacitet cp och densitet p ) och excitationsfrekvensen ƒ. Fastän den termiska vågan försvinner starkt, kan dess våg natur appliceras för att få insikt i provets egenskaper. Den första appliceringen av termisk våginterferens användes för att bestämma lagrets tjocklek. I motsats till vår metod användes störningseffekten i djupdimensionen ( dvs. vinkelrätt mot ytan) Ref "> 13. Förlängning av tanken på störning av en andra dimension genom att dela upp en laserstråle användes termisk våginterferens för att dimensionera underskriftsdefekterna 14. Fortfarande användes denna metod i överföringskonfiguration vilket innebär att den var begränsad av penetreringen Värmevågens djup. Eftersom endast en laserkälla har använts gäller denna metod konstruktiv interferens, vilket innebär att en defektfri referens behövs. Förutom ideen att använda termisk våginterferens, är det första tekniska tillvägagångssättet för rumsligt och Temporärt kontrollerad uppvärmning utfördes av Holtmann et al. Med användning av en omodifierad LCD-projektor med flytande kristall (LCD) -projektor med den inbyggda ljuskällan, som var allvarligt begränsad i sin optiska utgångseffekt 15. Ytterligare tillvägagångssätt av Pribe och Ravichandran, som syftar till att öka den optiska Utgångseffekt genom att även koppla en laser till en SLM 16 , S = "xref"> 17.
Beskrivs härmed av dess materialegenskaper (värmeledningsförmåga k , värmekapacitet cp och densitet p ) och excitationsfrekvensen ƒ. Fastän den termiska vågan försvinner starkt, kan dess våg natur appliceras för att få insikt i provets egenskaper. Den första appliceringen av termisk våginterferens användes för att bestämma lagrets tjocklek. I motsats till vår metod användes störningseffekten i djupdimensionen ( dvs. vinkelrätt mot ytan) Ref "> 13. Förlängning av tanken på störning av en andra dimension genom att dela upp en laserstråle användes termisk våginterferens för att dimensionera underskriftsdefekterna 14. Fortfarande användes denna metod i överföringskonfiguration vilket innebär att den var begränsad av penetreringen Värmevågens djup. Eftersom endast en laserkälla har använts gäller denna metod konstruktiv interferens, vilket innebär att en defektfri referens behövs. Förutom ideen att använda termisk våginterferens, är det första tekniska tillvägagångssättet för rumsligt och Temporärt kontrollerad uppvärmning utfördes av Holtmann et al. Med användning av en omodifierad LCD-projektor med flytande kristall (LCD) -projektor med den inbyggda ljuskällan, som var allvarligt begränsad i sin optiska utgångseffekt 15. Ytterligare tillvägagångssätt av Pribe och Ravichandran, som syftar till att öka den optiska Utgångseffekt genom att även koppla en laser till en SLM 16 , S = "xref"> 17.
Protokollet som presenteras här beskriver hur man applicerar LPPT-metoden för att lokalisera underskriftsdefekter orienterade vinkelrätt mot ytan av stålprover. Metoden är i ett tidigt skede, men ändå kraftfullt nog att validera det föreslagna tillvägagångssättet. Det är emellertid fortfarande begränsat med avseende på den uppnåbara optiska utmatningskraften i experimentuppsättningen. Eftersom ökningen av den optiska utgångseffekten fortfarande är en utmaning, appliceras den presenterade metoden på belagt stål innehållande konstgjorda elektriska urladdningsbearbetade skåror. Ändå håller de viktigaste och mest kritiska stegen i protokollet, som genererar en homogen strukturell belysning, mötesförutsättningar för destruktiv termisk våginterferens och lokalisering av defekten, fortfarande för mer krävande defekter. Eftersom den reglerade kvantiteten är den termiska diffusionslängden μ, kan LPPT-metoden appliceras på många olika material också.
nt ">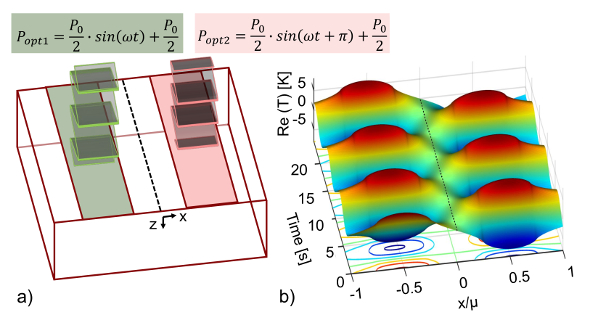
Figur 1: Princip för destruktiva interferenseffekter. ( A ) Schematisk av belysningsmönstret som användes under experiment. Provet upphettas rumligt och temporärt av två periodiskt upplysta mönster med fasförskjutning av π. Den streckade linjen representerar symmetrilinjen mellan båda mönstren. Denna linje kommer att användas för utvärdering som en "uttömningslinje". ( B ) Diagram över det rumsligt och tidsmässigt upplösta alternerande termiska resultatet som beräknat från den analoga lösningen av värmekärlledningsekvationen. Den visar de svarande termiska vågorna på belysningen av (a) med en bestrålning av de två mönstren med P opt 1 = 1,5 W sin (2π 0.125 Hz t ) + 1,5 W och P opt 2 = 1,5 W sin (2π 0,125 Hz t + Π) + 1,5 W för konstruktionsstål ρ cp = 461 J / (kg · K), k = 54 W / (m · K). Temperaturprofilen vid streckad linje visar ingen termisk oscillation för homogent, isotropt material. Vänligen klicka här för att se en större version av denna figur.

Figur 2: Schematisk av mätprincipen för strukturerad uppvärmning som används i aktiv termografi. En Gaussisk stråle som är homogeniserad till en topphattprofil appliceras på en rymdljusmodulator (SLM). SLM löser strålen spatialt av dess omkopplingsbara element och temporärt genom dess omkopplingshastighet. Varje element representerar en SLM-pixel. I detta experiment är SLM en digital mikrospegel-enhet (DMD). Genom att modulera bildens ljusstyrka A med en tidsdeterministisk styrprogramvara, provytanVärms upp på ett strukturerat sätt. Vid det presenterade experimentet modulerar vi två antifaserade linjer (faser: φ = 0, π), vilka är ursprunget till koherent störande termiska vågfält vid vinkelfrekvensen ω. Vågfälten interagerar med provets inre struktur och påverkar även temperaturfältet vid ytan. Detta mäts via sin termiska strålning med en infraröd kamera i mitten. Vänligen klicka här för att se en större version av denna figur.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
OBS! Varning: Var uppmärksam på lasersäkerheten eftersom installationen använder en klass 4-laser. Använd lämpliga skyddsglasögon och kläder. Hantera också pilotlasern försiktigt.
1. Koppla diodlasern till projektorns utvecklingssats (PDK)
- Förbered brödbrädet.
- Montera alla enheter i brödbrädet enligt bild 3 . Lägg brödbrädet med alla förmonterade enheter i ett laserlaboratorium.
- Placera laserfiberfästet på brödbrädet.
- Fäst fibern på laserfiberfästet ( se figur 3 ).
- Byt slutartid och lasertröskel för diodlasern. Genom att använda IR-sensorkortet med hög effekt kontrollerar du utmatningsdiametern (40 mm) på strålen. Stäng av laserskärmen och pilotlasern. Justera höjden på den optiska axeln vid laserfiberfästet till ingången till PDK genom att användaLabkontakten ( se figur 4a, 4d ).
- Flytta laserfiberfästet längs skenan. Beakta läget för pilotlasern på ett avstånd. Dess mittpunkt bör inte röra sig. Om det gör det, kontrollera monteringen mellan lab jack och laser fiber mount. Fixera laserfiberfästet efteråt.
OBS! Skenan är referens för optisk axel och bör anpassas parallellt med brödbrädet. Teleskoplinserna måste avlägsnas i förväg.
- Justera teleskopet.
- Använd teleskopet för att minska stråldiametern från 40 mm till 15 mm för att passa in i PDK: s ingång ( se figur 4a, 4d ). Använd en 200 mm och en 75 mm plano konvex lins som respektive respektive första lins. Använd pilotlasern och korshåren för att placera den första linsen ( se figur 4b ).
- Justera avståndet mellan båda linserna grovt med hjälp av stållinjen. Använd crosshairs igenAtt placera linsen på pilotlasern. Montera den andra linsen på ett xy-översättningssteg. Använd scenen för att kollidera strålen.
- Justera strålprovtagaren.
- Hit (med laserstrålen) strålprovtagaren i en vinkel på 45 °. Använd en andra räls vinkelrätt mot den första för att placera strålprovtagaren.
OBS! Det mesta av den optiska effekten kyls av med 500 W effektmätaren. Diodlaserns optiska utgång är stabilare vid full effekt, varför den optiska effekten är uppdelad. - Använd irisen i ett höjt ställe för att kontrollera den optiska vägen längs skenan ( se figur 4a ) med pilotlasern.
- Hit (med laserstrålen) strålprovtagaren i en vinkel på 45 °. Använd en andra räls vinkelrätt mot den första för att placera strålprovtagaren.
- Justera spegeln.
- Innan du justerar spegeln som visas i figur 4c , ta bort PDK och dess basplatta. Fixa en tredje räls vinkelrätt mot den andra. Återigen, kontrollera den optiska banan med iris.
OBS: Den optiska banan sSka vara inriktad på skenans orientering. Strålen bör kollimeras.
- Innan du justerar spegeln som visas i figur 4c , ta bort PDK och dess basplatta. Fixa en tredje räls vinkelrätt mot den andra. Återigen, kontrollera den optiska banan med iris.
- Demontera och placera PDK.
- Innan du placerar PDK 18 , ta bort originalljusmotorn.
OBS! Det fanns två tidigare linser som ursprungligen kollimerade LED-lamporna i PDK 19 ( se figur 4d , ingång). De limes och måste tas bort med aceton. - Rikta plattformen för PDK att vara parallell med den tredje rälsen och därmed till strålens optiska axel. Använd crosshairsna justerade till PDK: s ingång för att placera PDK i förhållande till strålen. Håll kontakten parallell. Stäng av pilotlasern, eftersom den är för svag för att passera PDK.
- Innan du placerar PDK 18 , ta bort originalljusmotorn.
- Projekt en vit bild för att kontrollera den optiska effekten.
- Se till att HDMI-kabeln och USB-kabeln på PDK samt datakällan (DAQ) -kortet är anslutna tillKontroll PC. Anslut portarna i laserkontrollboxen för "laserutlösare", "laser tröskel" och "laser på" till DAQ-kortet. Anslut kontrollpanelens "laserkontrollspänning" -port till DAQ-kortet.
- Starta PDK-kontrollprogrammet 20 och konfigurera det som en vanlig projektor som följer stegen i.1 till i.3 i figur 5b . Aktivera den andra skärmen och se till att det inte finns något fönster på den andra skärmen. Använd en vit skrivbordsbakgrund och kontrollera projektorns funktion med LED-blixtlampan som ingångsljuskälla.
OBS! Om en vit bild projiceras till bildplanet för PDK, fungerar enheten korrekt.
- Kontrollera optisk ingångseffekt.
- Sätt 30W-effektmätarkopet som är anslutet till effektmätarens kontrollenhet i den optiska vägen framför PDK ( se figur 4e - position 1). Byt diodlasernPå med LPPT-laserstyrningsprogrammet enligt steg i.1 till i.3 i figur 5a ) vid en låg effektnivå av steg i.1 = 0,5 V.
OBS! LPPT-laserspecifikationen byter DAQ-kortet som byter laserstyrningsutgångarna ( se 1.7.1). Överväg lasersäkerhet, använd glasögon och skyddskläder! - Kontrollera strömmätarens sensorposition med IR-sensorkortet med hög effekt. Håll IR-kortet i strålen och se det glöda. Match stråldiametern till effektmätarens sensorområde ( Figur 3 ).
- Kontrollera den maximala optiska ingångseffekten vid PDK: s ingång (följ sedan figur 5a ), steg i.1) med ett värde av 10 V.
OBS! Den optiska ingångseffekten vid PDK: s ingång ska vara högst omkring 22 W 21 . Vid denna konfiguration tolererades mätningstider upp till 5 minuter utan att förstöra SLM, vilket är om PDK realiseras som en digital mikromirroranordning (DMD). - Kontrollera den optiska utmatningen.
- Placera 30 W strömmätarehuvudet i ungefärligt avstånd från 60 mm till PDK med hjälp av af = 60 mm lins ansluten till PDK-målet ( se figur 4e ).
- Placera LED-blixtlampan vid projektorns ingång ( se Figur 4d ) och sätt på den. Finjustera strömmätarens huvud så att det samlar ljuset på den projicerade bilden som visas i Figur 4e . Ta bort LED-blixten efteråt.
- Starta LPPT-laserkontrollprogrammet. Ange "0,5 V" i fältet "Spänning" och klicka på "Laser On!" knapp. Läs den optiska effekten från effektmätarens kontrollenhet. Stoppa lasern genom att klicka på "Stop" -knappen. Upprepa dessa steg för 2 V, 6 V, 10 V ( jfr Figur 5a , I.1 till I.3).
OBS! Om en spänning på 10 V ger en optisk utgångseffekt på &# 62; 4 W, det ursprungliga testet är framgångsrikt. Annars måste den optiska inriktningen kontrolleras. Försök att maximera den optiska effekten genom att finjustera spegeln.
- Mät strålprofilen.
- Använd en fotodiod med förstärkare och pinhål för att mäta strålprofilen för den resulterande projicerade bilden ( se figur 4f ). Om en strålprofil är tillgänglig, använd den här enheten men försvaga strålen.
- Fäst fotodioden till ett översättningsstadium som är monterat i en konsol. Anslut också ett neutraltäthet (ND) 1 reflekterande filter och 1-mm pinhålet till dioden. Placera fotodioden ovanpå ett motoriserat översättningsstadium och labkontakten. För att få höjd, använd två brödskivor (100 mm x 100 mm).
- Använd av = 100 mm objektiv efter PDK-målet ( se Figur 4e ) och projektera en vit bild med LED-blixtlampan ( se steg 1.7). Flytta fotodioden till bildplanet ochSe till att fotodiodens intervall flyttar i översättningsstadiet ligger inom den projicerade bilden ( se figur 4f ).
- Anslut fotodioden till strömförsörjningen och DAQ-kortet. Använd 40 dB förstärkning för 6 V styrspänning för optisk laserkraft. Anslut rörelsekontrollenheten till det motoriserade översättningssteget till kontrolldatorn.
ANMÄRKNING: LPPT-intensitetsprogramvaran styr rörelsen hos den tappade fotodioden genom det upplysta området med en konstant hastighet av v = 0,1 mm / s och registrerar bilddiodsignalen vid 100 kHz. Lasern styrs även via programvara. - Använd mikrometerskruven i scenen i steg på 1 mm som visas i Figur 4f för att skanna bilden. Se resultat som visas i Figur 6a-6b .
- Beräkna korrektionsbilden.
- För att korrigera strålprofilens inhomogenitet beräkna en inverterad pixelmatris angående strålenprofil. Identifiera intervallet för den projicerade bilden med hjälp av en kantdetekteringsalgoritm.
- Förvandla tidinformation till rumslig information med hjälp av scenhastigheten. Transformera den rumsliga informationen till pixeldomen i PDK med x = 1,024 pixlar och y = 768 pixlar. Normalisera diodsignalen till det maximala värdet.
OBS! Referensnivån för korrigering valdes med medelvärdet av alla normaliserade bildvärden. Nivån på dämpning beräknas med:
P Pixel är den normaliserade diodintensiteten per pixel. Värdena på Pixel LC över 1 är inställda på 1. - Multiplicera korrigeringsmatrisen ( se figur 6c ) med en vit bild och mäta profilen igen för att kontrollera om korrigeringen var tillräcklig ( se figur 6e-6h ).
2. Förbered provet
- Sätt 30W-effektmätarkopet som är anslutet till effektmätarens kontrollenhet i den optiska vägen framför PDK ( se figur 4e - position 1). Byt diodlasernPå med LPPT-laserstyrningsprogrammet enligt steg i.1 till i.3 i figur 5a ) vid en låg effektnivå av steg i.1 = 0,5 V.
- Använd två kvarter med 100 mm x 100 mm x 40 mm konstruktionsstål St37 som provmaterial med en densitet av ρ = 7 850 kg m -3 , värmeledningsförmåga k = 54 W · m -1 · K -1 och värmekapacitet Av cp = 461 J · kg -1 · K- 1 .
- Sätt in konstgjorda defekter i två kvarter vid 0,25 mm, 0,5 mm, 0,7 mm, 1,25 mm och 1 mm, 1,5 mm, 1,75 mm, 2 mm genom elektrisk urladdning bearbetning under ytan som visas i figur 7 .
- Tappa defekterna med skyddsband. Sandblast toppytan för att ha homogen absorption. Tappa defekterna med skyddsband före beläggning. Avfett ytan med aceton.
- Belägga det upplysta området med grafit spray från 30 mm avstånd två gånger (0 ° och 90 °). Beläggningen lyckas om det finns en homogen yta. Om beläggningen inte är intakt, börja avfettning och rengöring igen och upprepaBeläggningssteget. Torka ytan ~ 2 h. Rör inte ytan, det kommer att förändras emissivitet.
- Ta bort bandet och se till att grafiten inte går in i undersidan defekten.

3. Förbered experimentet
- Förbered PDK och diodlaser.
- Projekt en vit bild som beskrivs i steg 1.7). Kontrollera PDK: s optiska ingångseffekt enligt beskrivningen i steg 1.8). Kontrollera PDK: ns optiska uteffekt enligt steg 1.9).
- Anslut 500 W strömmätarehuvudet till effektmätarens kontrollenhet och sätt strömmätaren till styrdatorn (PC) via en USB-kabel.
- Förbered motionskontrollen och placera provet.
- Anslut rörelsekontrollen till översättningssteget och till styrdatorn via en USB-kabel. Placera översättningssteget ortogonalt till den optiska axeln på ett avstånd av cirka 80 mm relativt PDK.
OBS: LPPT-mjukvaranE, som kör på kontrolldatorn styr rörelsekontrollen. - Fäst 100mm-linsen till PDK-målet. Använd LED-blixtlampan som ingångsljuskälla ( se figur 4d , crosshairs markera ingången) till PDK för att hitta projektorns bildplan.
- Placera ett vitt pappersark i ungefärligt avstånd av 100 mm framför objektivet och flytta det fram och tillbaka för att hitta planet för den skarpa upplysta rektangeln, som är bildplanet.
- Placera den belagda provytan i detta plan. Ställ in provets höjd med hjälp av labkontakten monterad på linjärt översättningssteg. Välj höjden så att toppen av den upplysta rektangeln träffar provets topp ( se figur 4g ). Placera felet att det ligger inom området för det upplysta området.
- Nollsträcka rörelsekontrollen genom att släcka enheten och slå på den igen.
- Anslut rörelsekontrollen till översättningssteget och till styrdatorn via en USB-kabel. Placera översättningssteget ortogonalt till den optiska axeln på ett avstånd av cirka 80 mm relativt PDK.
- Förbered kameran och placera guldspegeln.
- Använd LED-blixtlampan som ingångsljuskälla för projektorn för att projicera en vit bild till provet.
- Placera guldspegeln i en höjd så att den ser provets övre kant ( Figur 4g ). Ställ in spegeln i en vinkel på ca 35 ° som det visas i figur 3 . Placera guldspegeln så nära som möjligt till PDK-objektet men inte skugga projiceringen.
OBS! Spegeln är fäst på ett stolpe i en monterad stolpe. Höjden och positionen är fastsatta med klämmor. - Montera IR-kameran på stativet. Nivå IR-kameran med bullseye-nivån. Justera IR-kameran till höjden av PDK-målet. Placera den så att den ser den projicerade vita bilden över guldspegeln.
OBS: Det ungefärliga avståndet längs den optiska vägen är cirka 1 m. - Använd distansringen mellan IR-kamerans mål och IR-kameran. GöraSäkerställ att kamerans triggeringång är ansluten till mätdataupptagningskortet för att utlösa ramfånget. Anslut även IR-kamerans kontroll-dator till IR-kameran via LAN-kabeln.
- Slå på kameran och vänta åtminstone för uppvärmningstiden ( ca 30 min).
- Starta IR-kamerastyrningsprogram. Ändra menyradsposten till "Camera". Klicka på "Connect" -knappen för att ansluta IR-kameran ( se Figur 8a , steg i.1).
OBS! Kameran visar en levande bild av scenen. - Klicka på knappen "Fjärrkontroll" för att öppna panelen "Fjärrkontroll" ( se figur 8d , steg i.2). Välj kalibreringen "HF 100mm (-10 ° C - 60 ° C) 1140 μs". Se figur 8d , steg i.2.1.
OBS! Kalibreringsområdet bör vara så liten som möjligt för att minska ljudet. - Justera linsens fokusring manuellt för att fokusera IR-kameran på denE provplan.
OBS! Det är viktigt att kamerans synvinkel är lika stor som det maximala projicerade området för att få maximal rumsupplösning ( se figur 4g ). Man kan behöva byta position, höjd och orientering på IR-kameran. För att bestämma om en bild är skarp behöver man en temperaturkontrast i bildplanet. En stållinje kan användas för att generera en kontrast. Om IR-bilden fortfarande har låg kontrast kan man justera den med hjälp av urvalsverktyget ( se figur 8c , i.3) - Utför en ojämnhetskorrigering genom att klicka på knappen "NUC" ( se figur 8d , steg i.2.2). Täck över IR-kamerans mål och klicka på knappen "ok".
- Bestäm relationen mellan IR-kamerans pixeldomän och projektorkoordinater.
- Bestäm relationen mellan PDK pixel domänen, IR kamera pixel domänen och leNgth skala av provet genom att projicera en vit bild eller mönster till provytan ( se figur 4g, h ). Mät det projicerade området med hjälp av en stållinje som ger förhållandet mellan PDK-domänen och provets längdskala.
- Använd f = 100 mm-linsen kopplad till PDK-målet för att få ett upplyst område på 21,3 mm x 16 mm (4: 3).
OBS: Längdskalan i PDK-koordinater är: 1 projicerad pixel = 21,3 mm / 1,024 pixel - Hitta förhållandet mellan PDK och IR-kamera. Upprepa steg 1.9.3) för 10 V.
- Använd IR-kamerans programvara för att ändra menyradsposten till "Mät". Välj "Cross tool" från verktygsfältet "Mätområden" ( se Figur 8c ), steg i.4). Markera hörnen på den resulterande termiska bilden genom att vänster klicka på bilden som visas.
- Högerklicka på korset för att komma till fastighetsfönstret. Byt till "koordinater" och registrera dem förSenare omvandling av den termiska bilden till PDK-koordinatsystemet.
4. Implementera experimentet
- Förbered experimentet.
- Uppskattningsbelysningsområde i förhållande till provets längdskala.
- Använd f = 100 mm lins för att få ett upplyst område på 5,5 mm x 16 mm per mönster. Välj ett område på 5,5 mm x 16,5 mm mellan dem som inte är upplysta.
OBS: Den resulterande bestrålningen är ungefär 1,2 W / cm².
- Använd f = 100 mm lins för att få ett upplyst område på 5,5 mm x 16 mm per mönster. Välj ett område på 5,5 mm x 16,5 mm mellan dem som inte är upplysta.
- Uppskatta belysningsområdet i enheter i förhållande till PDK pixel domänen.
- Omvandla det upplysta mönstret till PDK: s pixeldomän (1,024 pixlar x 768 pixlar) med ekvationen i steg 3.4.2. Använd [(512, 1); (512, 768)] pixlar i PDK-domänen som uttömningslinjen, som är symmetrisk mellan båda mönstren.
- Beräkna totalt antal ramar, mättid och ramar peR period. Om man antar en hastighet på v = 0,05 mm / s, beräknas en stegsträcka av x = 10 mm och en PDK-bildhastighet ƒ r = 40 Hz, mättiden t via t = x / v = 200 s. Beräkna också antalet ramar nej ƒ = ƒ r • t = 8 000. Med en excitationsfrekvens på ƒ = 0.125 Hz, beräkna ramarna per period p med p = nej ƒ / t ƒ = 320 bilder / period.
Obs! Dessa värden kommer att användas för att generera de projicerade bilderna. - Kontrollera inställningen och kontrollera att lasersystemet, IR-kameran och (valfritt) temperaturkontrollen är ansluten till DAQ-kortet. Kontrollera om 500 W-effektmätaren, PDK och linjärt steg ansluts till kontrolldatorn.
- Uppskattningsbelysningsområde i förhållande till provets längdskala.
- Ställ in kamerans kontroll PC.
- Konfigurera IR-kamerans kontrollprogramvara för att ta en ram när IR-kameran tar emot en triggeringång. För detta sHäxa till panelen "Camera" och klicka på "Remote" knappen ( se Figur 8a , steg i.2) för att öppna fjärrkontrollpanelen. Välj "Process IO" i rullgardinsmenyn ( Figur 8d , steg i.2.3) och aktivera "Sync In" och "Gate" och stäng menyn.
- Öppna förvärvsmenyn genom att klicka längst ned till höger på fliken "Förvärvsparametrar" ( se figur 8a , i.5). Välj "Ext / Sync" från rullgardinsmenyn ( se Figur 8b , i.5.1). Mäta mätningen genom att ange fil- och mappnamn i "Mapp" -fältet (se Figur 8b , i.5.2).
- Ange det totala ramnummer som beräknats från steg 4.1.3 i fältet "räkna" ( se i.5.3). Stäng anskaffningsmenyn och klicka på "Record" -knappen för att starta IR-kamerainsamling ( se figur 8 , i.6).
NOTERA:Endast inspelningen kommer att ske om det finns en triggeringång från DAQ-kortet.
- Utför experimentet.
- Starta LPPT-styrprogrammet. Aktivera rörelsekontrollern genom att klicka på "Aktivera?" Knappen ( figur 9a , i.1). Ställ in reseparametrarna "StartPosition" = "-5 mm", "EndPosition" = "5 mm" och "Velocity" = "0.05 mm / s" genom att redigera motsvarande namngivna fält som visas i Figur 9a , i.1. Klicka på knappen "Startmätning" (se Figur 9a , i.2).
OBS: Om det är oklart där defekten finns, välj ett större färdsträcka vid högre hastighet. Var uppmärksam på PDK: s ökningstemperatur och mängd data skapad. Observera att ett användargränssnitt för att generera rambilderna kommer att visas ( se figur 9b ). - Generera de projicerade rambilderna. <ol>
- Vänsterklicka på fältet Välj områdefärg. Välj en färg för mönsterområdet från färgdialogen ( Figur 9 , i.3). Välj "rektangelverktyget" från ritverktygsfältet i övre vänstra hörnet.
- Rita en rektangel på bildområdet genom att vänster klicka och hålla medan du sträcker sig över bildområdet. Använd de transformerade mönsterkoordinaterna från steg 4.1.2) för att dimensionera rektangelkoordinaterna som visas i det nedre vänstra hörnet (i.4). Klicka på knappen "Definiera område" ( Figur 9b , i.5).
Obs! De beräknade pixelkoordinaterna i PDK-domänen för 5,5 mm mönsterstorlek är: Rektangel 1 (x1 = 116, y1 = 1; x2 = 380, y2 = 768), rektangel 2 (x1 = 644, y1 = 1; x2 = 908, y2 = 768). Efter att ha klickat på knappen "Definiera område" visas en dialogruta för inställning av mönsteregenskaperna.
- Starta LPPT-styrprogrammet. Aktivera rörelsekontrollern genom att klicka på "Aktivera?" Knappen ( figur 9a , i.1). Ställ in reseparametrarna "StartPosition" = "-5 mm", "EndPosition" = "5 mm" och "Velocity" = "0.05 mm / s" genom att redigera motsvarande namngivna fält som visas i Figur 9a , i.1. Klicka på knappen "Startmätning" (se Figur 9a , i.2).
- Ställ in mönsteregenskaperna ( Figur 9c , i.6).
- Välj "sinusvåg" frånRullgardinsmenyn genom att klicka på fältet "Signaltyp". Definiera oscillationsparametrarna genom att ställa in fälten "Phase Shift" till "0 °", "Frequency" till "0.125 Hz" och "Amplitude" till "127" (fasförskjutning av 0 för det första mönstret och en fasförskjutning av π för den andra).
- Ställ in laserspänningen till 10 V genom att sätta "10" i fältet "Spänning". Klistra in 320 i fältet "Bild / period" med värdet från steg 4.1.3). Tryck på "Nästa" knappen; Detta stänger panelen.
OBS! LPPT-styrprogrammet beräknar en periodisk bildström vid upplösningen av PDK. Som en vit pixel avses maximal optisk effekt och en svart pixel nollkraft, beräknas två oscillerande mönster. Det första mönstrets gråvärde beräknas med Pl = 127 sin (2π 0.125 Hz t ) + 127 och den andra med P2 = 127 sin (2π 0.125 Hz t+ Π) + 127 (se figur 2 , graf), medan tiden t diskretiseras till den valda bildhastigheten ( se steg 4.3.4).
- Skapa det andra projicerade mönstret.
- Upprepa steg 4.3.2) och 4.3.3) efter arbetsflödet i Figur 9 men med en annan färg och en annan "Fasskift" på "180 °". Klicka på "Beräkningsramar" -knappen för att beräkna de projicerade mönstren. Ställ in bildskärmsfrekvensen PDK och IR-kamera för att vara "40 Hz" i dialogrutan som dyker upp.
- Ladda korrigeringsbilden.
- Följ arbetsflödet i Figur 9b ), steg i.12. Välj panelen "Lastkorrigering" och ge filen för den beräknade bilden från steg 1.11). Ladda korrigeringsbilden genom att klicka på knappen.
- Starta mätningen genom att klicka på "Start" -knappen ( se Figur 9b , steg i.13).
OBS: Beräknade ramar projiceras på provet medan scenen rör sig. Ramarna kommer att förvärvas och räknas av IR-kamerans kontrollprogram. - Stoppa mätningen när alla ramar är inköpta (framdriftsfältet = 100%) genom att klicka på knappen "Stop Measurement" ( se Figur 9a , I.14).
OBS! Knappens etikett ändras om det klickas.
5. Efterbehandla datafilen
- Starta LPPT efterbehandlingsprogram. Klicka på "ladda" -knappen och välj mätfilen i fildialogrutan. Klicka på "OK" för att omvandla kameratatformatet till dataformat efter bearbetning ( se figur 10a ).
OBS: IR-kamerans data lagras på IR-kamerans kontroll-dator i ett inbyggt format. IR-kamerakontrollprogramvaruutvecklingspaketet används för att omvandla IR-kamerans sekvens till en tredimensionell matris (pixel X, pixel Y, ramnummer) och enRubrik inklusive en tidsvektor t. - Omvandla IR-kameradata till PDK-domänen ( se Figur 10b ) genom att sätta in koordinaterna för de fyra projektionspunkterna P1x till P4y från steg 3.4.3 och klicka på "Transform".
OBS! På grund av bildprojektionen via guldspegeln till IR-kameran ( se figur 4g ) förvrängs den resulterande IR-bilden. En affine geometrisk transformation utförs från IR-kamera domänen till PDK-domänen. Resultatet är en matris med storlek 1,024 x 768 x ramnummer. - Extrahera temperaturinformationen vid avloppsledningen ( se figur 10c ).
- Definiera uttömningslinjen med två punkter L1 och L2 genom att fylla i fälten L1x = Lx2 = "512" pixel som den redan valdes i steg 4.1.2). Välj y från L1y = "343" till L2y = "393". Se figur 10c .
OBS: På grund av omvandlingen i steg 5.2) kan data varaHämtas direkt, men biverkningar uppstår eftersom provet endast delvis är upplyst. Undersök därför inte mönstrets kantområden. Om ljudet fortfarande är för högt kan y-storleken ökas. - Ställ in experimentparametrarna för IR-kameran genom att fylla i följande fält: FrameRate som "40" Hz, frekvens som "0.125" Hz, hastighet v som "0.05" mm / s och startposition xStart som "-5" mm ( jfr. Figur 10c ). Ställ in parametrarna för data efterbehandling: "Fit Degree" = "7", "Smoothing" = "20" och "Hilbert" = "500" som i Figur 10c .
OBS: Data som extraheras vid uttömningslinjen är geometriskt medelvärdet. Därefter hämtas den alternerande temperaturtermen ΔT (se Figur 11a, b ) genom att utföra en polynomisk passform (Fit Degree). Den resulterande signalen mjukas av ett glidande medelfilter (utjämning).Slutligen appliceras en Hilbert-transformation för att hämta den momentana amplituden. Ett annat glidande medelfilter (Hilbert) appliceras för att minska resterande krusningar. Med hjälp av information om amplitudminimum erhålls läget för den dolda defekten. - Klicka på "Utvärdera" för att utföra dataanalysen. Läs felets beräknade position från fältet "CrackPosition [mm]". Felpositionen visas i fönstret i Figur 10d .
- Definiera uttömningslinjen med två punkter L1 och L2 genom att fylla i fälten L1x = Lx2 = "512" pixel som den redan valdes i steg 4.1.2). Välj y från L1y = "343" till L2y = "393". Se figur 10c .

Figur 3: Fotografi av experimentell inställning med markerad optisk väg (röd linje). Laserfiberfästet är fäst vid diodlaserns fiber. Strålen justeras av teleskopet till PDK: s ingångsdiameter. Innan du går in i PDK, delas strålen av stråleprovtagaren och övervakas av effektmätaren. Inuti PDK-strålen homogeniseras strålen aNd projiceras till en DMD. PDM, som styrs av LPPT-styrprogrammet, projekterar belysningsmönster till provet. Det projicerade ljuset är fototermiskt omvandlat och värmer upp provet. Temperaturen mäts av en IR-kamera via den termiska strålningen (orange linje) emitterad från provytan. Provet själv är placerat på det linjära translationssteget. Vänligen klicka här för att se en större version av denna figur.

Figur 4: Bildsekvens som visar justeringen av experimentinställningen. ( A ) Uppifrån av experimentuppställningen visar en översikt. B ) Justering av teleskopet: Korshåren används för att centrera linsen mot laserstrålens optiska axel. ( C ) Justera de optiska elementen: Ett stångsystem mounteD till den optiska bänken används för att rikta den optiska strålen relativt bänken. En höjdfixerad iris används för att hålla strålen parallell med bänken. ( D ) Bild av sidovy av kopplingspunkten mellan projektorn och strålen. Korshåren används för att rikta projektorn till strålen. ( E ) Bestämning av projektorns överföring: Effektmätaren används för att mäta optisk effekt före och efter projektorn. ( F ) Bestämning av strålprofilen: Pinhole och ND1 filter är monterade på dioden som flyttas via två linjära steg genom den projicerade bilden. Projektorn måste konfigureras för att projicera en vit bild. ( G ) Placering av den infraröda kameran i provet via en guldspegel: Provet måste placeras i projektorns bildplan. För att styra kraftdensiteten kan objektivet och tilläggslinserna kopplade till målet användas. ( H ) BestämningAv skalan mellan projicerad bild, IR-kamerabild och den verkliga längden av provet. Vänligen klicka här för att se en större version av denna figur.

Figur 5: Skärmdump för programvara. ( A ) Skärmdump av LPPT laserstyrningsprogram. ( B ) PDK-kontrollprogram: Steg i.1 till i.3 visar hur man konfigurerar PDK som en vanlig projektor. Vänligen klicka här för att se en större version av denna figur.

Figur 6: Korrigering av den inhomogena strålprofilen. ( A ) Strålprofil för den projicerade vita bilden (full belysning) tagen av a Fotodiod som flyttades genom profilen. Uppgifterna visar en inhomogen strålprofil med en framstående topp i mitten. ( B ) Tvärsnittslinjeprofilen som motsvarar den röda linjen i a). ( C ) Korrigeringsbild som överlagras på SLM med den projicerade vita bilden för att minska inhomogenitetsnivån. ( D ) Den motsvarande tvärsnittsprofilen för den röda linjen i c). ( E ) Resultatet av strålprofilen efter korrigering visar en profil närmare en topphattprofil. ( F ) Den motsvarande tvärsnittslinjeprofilen för den röda linjen i e). ( G ) Belysningsprofil av två korrigerade mönster. Mönstren kommer att moduleras med samma frekvens och amplitud men med motsatta faser som skapar en zon av destruktiv interferens mellan mönstren. ( H ) Den motsvarande tvärsnittslinjeprofilen för den röda linjen i g). Ve.com/files/ftp_upload/55733/55733fig6large.jpg "target =" _ blank "> Vänligen klicka här för att se en större version av denna figur.

Figur 7: Provberedning. ( A ) Fotografi av provytan som visar ett block av svart belagt strukturellt stål St37 (20 mm x 0,5 mm x 15 mm). ( B ) Transparent CAD-ritning av undersidan defekter. Defekterna ligger 40 mm från höger sida. C ) Sidovybilder av proven som visar idealiserade defekter vid olika djup under ytan (sida 1 = 0,25 mm, sida 2 = 0,5 mm, sida 3 = 0,7 mm, sida 4 = 1,25 mm). Provsidorna är obelagda för att minska värmeförlusterna. Det andra provet (ej visat) har underskriftsfel på: sida 1 = 1 mm, sida 2 = 1,5 mm, sida 3 = 1,75 mm, sida 4 = 2 mm.= "_ Blank"> Vänligen klicka här för att se en större version av denna figur.

Figur 8: Skärmbilder av IR-kamerans styrprogramvara. Stegen i.1 till i.5 visar hur du konfigurerar IR-kameran för datainsamling. ( A ) Skärmdump av "Kamera" -panel: IR-kameran kan anslutas till IR-kamerakontrollen via "Connect" -knappen. Kontrollpanelen "Fjärrkontroll" (b) och förvärvspanelen (d & e) kan nås härifrån. Dessutom kan mätningen startas via "Record" -knappen. ( B ) Skärmdump av "Acquisition" -panelen: IR-kameran måste konfigureras via "Ext / Sync" för att fånga en ram om den tar emot en 5 V TTL-trigger. ( C ) Skärmdump av "Mätning" -panelen: Datavisningsområdet kan justeras med "Selection" -knappen. Punkt- och linjeverktygAnvänds för att kalibrera IR kamera bilden till riktiga världskoordinater. ( D ) Skärmdump av "IR-kamerans fjärrkontroll" Kalibreringar "-panel. Ett litet mätområde (-10 till 60 ° C) måste väljas för att uppnå en hög känslighet. ( E ) IR-kamerans fjärrkontrollpanel: "Process-IO", "IN1" och "IN2" måste aktiveras för att utlösa IR-kameran. Vänligen klicka här för att se en större version av denna figur.

Figur 9: Skärmdumpar av LPPT-styrprogramvaran. Arbetsflödet för användarinteraktioner med mjukvaran markeras med steg i.1 till i.14. ( A ) Skärmdump av LPPT huvudpanel; "Aktiverad?" Är en booleskt typ och aktiverar scenen om den är sann. "Start-" och "EndPosi"Fältet "Hastighet" definieras i mm / s. "Startmätning" -knappen startar mätningar, öppnar dialogrutan som visas i panel (b) och stoppar mätningen om den är felaktig. ( B ) Skärmdump av användargränssnittet som används för att skapa de mönster som projiceras till provet. En färg är vald för att representera ett område med pixlar. Området väljs genom att rita rektanglar till bilden. Om knappen "define Area" trycks in, Panelen som visas i panel (c) kommer att dyka upp för att definiera områdets egenskaper. Efter att ha definierat alla områden, kommer knappen "calc Frames" att beräkna en uppsättning bilder. "Load Correction" kommer att ge en dialogruta för att ladda korrigeringen Bilden för att undvika en inhomogen strålprofil. Knappen "Start" startar mätningen. C ) Skärmdump av användargränssnittet som används för att ställa in egenskaperna hos ett mönster. Den övre ramen visar signaltyp (sinusvåg), fasskiftI grader och frekvens i Hz. Den nedre ramen visar ramar per period, amplitud från 1 till 127 och laserspänning (0 V till 10 V = 0 W till 500 W). Ramar per period är det värde som representerar hur fin en period diskretiseras. När knappen "Next" (vidare) har tryckts upp visas en dialogruta och frågar om kamerans bildfrekvens i Hz och ramkopplingshastighet i Hz. Vänligen klicka här för att se en större version av denna figur.

Figur 10: Skärmdumpar av LPPT efterbehandlingsprogram. ( A ) Ladda och transformera det infödda IR-kameraformatet. ( B ) Omforma rammatrisen till projektorns koordinatsystem genom att använda transformationspunkterna P1x till P4y. ( C ) L1x till L2y representerar pixelkoordinaterna för den utvärderade linjen. &# 34; v "," xStart "," FrameRate "och" Frequency "är experimentella parametrar." V "är hastigheten i mm / s," xStart "startpunkten för scenen i mm," FrameRate "och" Frequency "Anges i Hz." Fit Degree "," Smoothing "och" Hilbert "är utvärderingsparametrar. Fit Degree representerar graden av polynomisk passform." Utjämning "representerar antalet element för ett glidande medelfilter som används för att minska brus och "Hilbert" -parametern används för att ställa in jämnhetsnivå för att hitta minsta kurvan. ( D ) Skärmbild av resultatet som visar sprickpositionen som en vertikal streckad linje. Vänligen klicka här för att se en större version av denna figur.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Efter protokollet valdes sid 1 av stålprovet med en underskriftsdefekt vid ett djup av 0,25 mm för att generera representativa resultat. Defekten var initialt placerad ungefär i mitten av det upplysta området. Provet flyttades sedan från -5 mm till 5 mm via det linjära steget med en hastighet av 0,05 mm / s. Med hjälp av dessa parametrar visar figur 11a skanningsdata efter att ha extraherats från uttömningslinjen. I detta skede kan experimentets framgång uppskattas, eftersom de råa data är tillgängliga från IR-kamerans kontrollprogramvara som förhandsvisning (valfritt: Använd linjverktyget för att förhandsgranska data, se figur 8 , steg i.4) . Efter ytterligare signal efterbehandling visar figur 11b defektpositionen till minst Hilbertkurvan (blå) vid 0,3 mm.
För att validera experimentet bör kurvan hAve följande egenskaper: det ska vara symmetriskt, ha ett uttalat minimum vid symmetriplanet och två lika höga maxima till vänster och höger. Maxima uppstår eftersom värmeflödet från en av ledningskällorna dominerar över det andra på grund av ackumulering av värme vid defekten. Detta är speciellt fallet när defekten är placerad nära symmetriplanet. Defekten utgör en barriär för värmeflödet så att vi kan observera värmeströmmen hos den dominerande källan och dess reflektion från defekten. Om defekten är placerad symmetriskt i mitten splittras värmeflödet jämnt, vilket resulterar i minst 1 .
Effekten av skanningshastigheten visas i figur 11c . Här fördubblades scanhastigheten till 0,1 mm / s för att utvärdera samma defekt. I förväg skiftades provet något på scenen för att få en annan relativ position. Defektpositionen bestämdesAtt vara -2 mm. Nivån av förlängningen liknade de data som visas i Figur 11a , vilket visar god reproducerbarhet av experimentet, men med färre oscillationer. Eftersom maximal förlängning korrelerar med felets djup, kan information om position och djup bibehållas 1 .
Figur 11d visar en suboptimal dataset. Defekten var 1 mm under ytan, vilket är nästan vid detektionsgränsen för denna diffusionslängd och den tillgängliga optiska effekten. Även om felets placering fortfarande kan bestämmas är mätosäkerheten större eftersom nolloscillationsplatsen redan påverkas av brus. Ur detta beteende kan vi dra slutsatsen att de mest uppenbara tecknen på att defektdetekteringsexperimentet misslyckas är om uttömningslinjen försvinner helt eller om det finns ett starkt asymmetriskt beteende. Detta kan bero på folloVingsskäl: (i) IR-kamerans upplösning är inte tillräcklig och uttömningslinjen kan inte lösas ordentligt, (ii) kamerans brus är för högt jämfört med temperaturhöjningen, (iii) belysningsmönstret är Inhomogen och har inte korrigerats på rätt sätt, iv) den valda scenhastigheten är för hög jämfört med belysningsmönstrets modulationsfrekvens, och (v) termisk diffusionslängd (via moduleringsfrekvensen) inte är anpassad till defekten djup.

Figur 11: Representativ dataset från experiment för att lokalisera underskriftsfel. ( A ) Representativa experimentdata från St37-provet, sida 1 med en defekt vid ett djup av 0,25 mm. Den svarta linjen visar temperaturinformation över tiden (toppaxel). Genom att översätta scenen med en hastighet v = 0,05 mm / s är positionenHämtas (bottenaxeln). Den röda kurvan visar en polynomisk passform (7 : e grad) som används för att få den alternerande temperaturkomponenten. Den streckade röda linjen representerar underskriftsfelens position. ( B ) Den svarta kurvan visar den alternerande temperaturgrafen som erhållits genom att subtrahera polynompassningen från temperaturdata på panel (a). Den blå kurvan erhölls genom att använda Hilbert-transformation till den svarta kurvan och medelvärdet. C ) Representativa experimentdata på samma sida över ett intervall på -7 mm till 3 mm vid en hastighet av 0,1 mm / s. Frekvensen halveras men förlängningen liknar panel (a). ( D ) Suboptimal experimentell data som erhölls när undersidan defekten var på 1 mm djup. Vänligen klicka här för att se en större version av denna figur.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Det presenterade protokollet beskriver hur man lokaliserar artificiella underskriftsdefekter orienterade vinkelrätt mot ytan. Huvudideen med metoden är att skapa störande termiska vågfält som interagerar med undersidan defekten. De viktigaste stegen är att (i) kombinera en SLM med en diodlaser för att skapa två alternerande högeffektsbelysningsmönster vid provytan; Dessa mönster omvandlas fototermiskt till koherenta termiska vågfält, (ii) låta dem förstöra destruktivt medan de interagerar med en underjordsfel och (iii) lokalisera dessa defekter från en ytskanning av provytans dynamiska temperatur med hjälp av en termisk bildbehandling IR-kamera. Eftersom endast relativ oscillation av temperaturen kring ett långsamt varierande medelvärde och inte det absoluta temperaturvärdet behövs är detta tillvägagångssätt extremt känsligt för dolda defekter 1 .
Ett av de mest kritiska stegenInom protokollet är att fastställa tillräcklig homogenitet hos belysningsstrålprofilen när man använder en SLM-kopplad laserkälla för strukturerad uppvärmning (se steg 1.10). Diodlasern erbjuder hög strålning, men måste matas in i projektorn som innehåller SLM med rätt stråldiameter och riktning. På grund av små oundvikliga geometriska och spektrala misslängder med den proprietära optiska vägen inuti projektorn förvrängs den genererade bilden på provet. Därför utförs en numerisk korrigering av bildintensitetsvärdena som styr den projicerade bilden med en referensstrålprofilmätning. Ett andra kritiskt steg för ett framgångsrikt experiment är att uppnå en hög rumslig upplösning av IR-bilden (se stegen 3.3.7-3.3.8). Utarmningszonen måste vara tillräckligt rymdlös, annars ingen uttömning och därför kan ingen defektposition mätas.
De applicerade termiska vågornas natur är en diffusionsliknandeProcess som leder till en stark dämpning av deras amplitude över några millimeter enbart. Vi möter denna inneboende fysiska begränsning genom att använda en hög-effektdiodlaser som ljuskälla. Flaskhalsen i den nuvarande experimentella inställningen är SLM 21: s termiska spänningsgräns, vilket innebär att endast en bråkdel av den tillgängliga laserkraften kan appliceras. Vår nuvarande lösning är att belägga provytan med en svart grafitbeläggning. I framtiden förväntar vi oss inställningar med högre känslighet genom att använda optimerade ljusmotorer eller till och med byta direktdisplayer, såsom högkvalitets vertikala kavitetsytor (VCSEL) arrays 22 .
Huvudskillnaden mellan denna metod och den befintliga termiska bilden i icke-destruktiv testning är det faktum att vi använder den destruktiva interferensen av helt sammanhängande termiska vågfält. Vilket endast är möjligt efter att ha kontroll över amplituden och fasen hos en uppsättning individuella liGht källor på ett deterministiskt sätt. Inom de befintliga termografiska metoderna används antingen en plan ljuskälla, styrd i tidsdomänen eller en enda fokuserad laserpunkt, som styrs i den rumsliga domänen. Den stora fördelen med vårt tillvägagångssätt är hög känslighet för defekter som ligger vinkelrätt mot provytan.
Hittills har endast två individuella ljuskällor skapats. Med den laserkopplade SLM kan vi i princip generera och styra upp till en miljon enskilda ljuskällor - en miljon värmekällor - på provytan. Tydligen öppnar detta tillvägagångssätt möjligheterna till godtycklig termisk vågformning på lång sikt och överför tekniker från ultraljud eller radar till området för aktiv termografi, inom fysiska gränser. När bestrålningsutmaningen som nämnts ovan ( dvs optisk effekt per projicerad pixel) löses på ett tillfredsställande sätt, bör även mindre defekter som ligger djupare under ytan upptäckas. Än så länge,Stål har testats, men metoden är mycket lovande speciellt för plast, förening och andra känsliga material på grund av den låga värmestress som appliceras.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Författarna har ingenting att avslöja.
Acknowledgments
Vi vill tacka Taarna Studemund och Hagen Wendler för att ta fotografier av experimentuppställningen samt förbereda dem för figureringspublikation. Dessutom vill vi tacka Anne Hildebrandt för provberedningen och Sreedhar Unnikrishnakurup, Alexander Battig och Felix Fritzsche för korrekturläsning.
Materials
| Name | Company | Catalog Number | Comments |
| 500 W diode laser system, 940 nm | Laserline | LDM 500 - 20 | Pilot laser class 2 @ 650 nm, diode laser is a class 4 laser system --> special laboratory needed |
| Laser control box | Laserline | Laser control box LDM | Add on to the laser system, used to switch electronically, laser threshold, shutter, laser on 0 V..5 V TTL |
| Control box scanner | Laserline | Add on to the laser system, used to adjust the optical output power via analog signal from 0 V..10 V | |
| Fiber Laser Mount 2", f = 80 mm | Laserline | Add on to the laser system | |
| Multifunction Data Aquisition (DAQ) Device + BNC Terminal | National Instruments | NI-USB 6251 | The DAQ card is used to trigger the IR camera, the DLP Light Commander 5500, control Laser and diode PDA 36A |
| Standard - PC | Control PC - graphic card for two screens, at least 4 x USB, Windows based | ||
| BNC cabel | Standard cable | ||
| HDMI cable | Standard cable | ||
| Micro USB to USB cable | Standard cable | ||
| LabVIEW 2013 SP1 Development System | National Instruments | Development environment for device control | |
| LPPT control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT intensity software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT laser control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| Matlab 2016b | MathWorks | Postprocessing of the measurement data | |
| LPPT postprocessing software | BAM | Postprocessing of the measurement data | |
| IR camera control PC | InfraTec | Control PC is supplied by camera distributor | |
| IR camera control software | InfraTec | Irbis 3 Professional | |
| InfraTec SDK | InfraTec | Dynamic Link Library as interface between the native data aquisition format of Infratec and Matlab | |
| IR camera | InfraTec | Image IR 8300 | 640 x 512, cooled InSb detector, wavelength 2 µm..5.7 µm, noise = 20 mK + accessories (LAN cable, Digital in/out cable, space ring, power supply, case) |
| Tripod | Manfrotto | 161MK2B | |
| IR camera mount | Manfrotto | 405 | |
| Projector development kit (PDK) for digital light processing (DLP) technology (DLP Light Commander 5500) | Logic PD | DLP-LC-DLP5500-10R | DLP5500 Digital Micromirror Device from Texas Instruments included , light engine and case need to be disassembed |
| PDK control software | Logic PD | Included when delivered, DLP Light Commander control software | |
| Mechanical platform for the PDK | BAM | Self made (140 x 230 x 420) mm3 | |
| Power meter control unit | Ophir | Vega | USB Interface |
| 30 W power meter head | Ophir | 30(150)A-LP1-18 | Power meter head to determine Transmission of the projector system |
| 500 W power meter head | Ophir | FL500A | Power meter for process supervision |
| Motion controller | Newport | ESP301 | with USB Interface |
| Translation stage | Newport | M-ILS200CC | Connected to ESP301 |
| Photodiode with amplifier | Thorlabs | PDA 36A-EC | 1" mount |
| Reflective filter ND1 | Thorlabs | ND10A | to be mounted to the PDA 36A |
| Pinhole 1" | Thorlabs | P1000S | to be mounted to the PDA 36A |
| Optical aluminium breadboard | Thorlabs | MB60120/M | (1,200 mm x 900 mm) base |
| Plano Convex Lens f = 200 mm | Thorlabs | LA1979-B | Coated for IR, first telescope lens |
| Plano Convex Lens f = 75 mm | Thorlabs | LA1145-B | Coated for IR, second telescope lens |
| xy-translation stage | Newport | M401 | Used for adjusting the telecope |
| Beamsampler | Thorlabs | BSF20-B | Splits the optical output, used to reduce the optical input for the projector system |
| Mirror | Thorlabs | BB2-E03 | Mirror for coupling the beam to the DLP Light Commander |
| Heavy duty lab jack | Thorlabs | L490 | Used for the fiber mount and on top of the linear stage to position the sample (2x) |
| PDK-objective | Nikon | Nikon AF Nikkor 50 mm 1:1:8:D | Objective for DLP Light Commander, 50 mm |
| Plano Convex Lens f = 100 mm | Thorlabs | LA1050 -B | Lens is attached to the Nikon Objective |
| Bi-Convex Lens f = 60 mm | Thorlabs | LB1723 -B | Lens to be attached to the Nikon objective in order to determine the optical transmission with the 30 W measurement head |
| Square protected gold mirror | Thorlabs | PFSQ20-03-M01 | |
| High power IR sensor card | Newport | F-IRC-HP-M | Sensor card to check the optical pathway |
| 2" crosshairs | BAM | Self-made | |
| 1" crosshairs | BAM | Self-made | |
| Bullseye level | Thorlabs | LCL01 | |
| Translation Stage | Newport | M-UMR8.25 | Used for measuring the beam profile |
| Micrometer screw | Newport | DM17-25 | Used with translation stage M-UMR8.25 |
| Mounted Zero Aperture Iris | Thorlabs | ID75Z/M | used to check the optical pathway |
| Bases and Post Holders Essentials Kit, Metric and Universal Components | Thorlabs | ESK01/M | Basis |
| Posts & Accessories Essentials Kit, Metric and Universal Components | Thorlabs | ESK03/M | |
| M6 Cap Screw and Hardware Kit | Thorlabs | HW-KIT2/M | |
| Construction Rails | Thorlabs | XE25L700/M | |
| 1" Construction Cube | Thorlabs | RM1G | Used to mount construction rails |
| Electrical discharge machining | Sodick | AG60L | www.sodick.de |
| St37 block of steel (100 x 100 x 40) mm3 |
BAM | self-made, hidden defect with remaining wall thicknesses of 0.25 mm, 0.5 mm, 0.70 mm, 1.25 mm (shown in Figure 5) | |
| St37 block of steel (100 x 100 x 40) mm |
BAM | self-made, hidden defect with remaining wall thicknesses of 1 mm, 1.5 mm, 1.75 mm, 2 mm (shown in Figure 5) | |
| Graphite spray | CRC Industries Europe NV | GRAPHIT 33 | Ref. 20760, 200 mL aerosol (Kontakt-Chemie) |
| Protective tape | Tesa | tesakrepp 4348 | used to protect the hidden defects while coating |
References
- Thiel, E., Kreutzbruck, M., Ziegler, M. Laser-projected photothermal thermography using thermal wave field interference for subsurface defect characterization. Appl. Phys. Lett. 109 (12), 123504 (2016).
- Ibarra-Castanedo, C., Tarpani, J. R., Maldague, X. P. V. Nondestructive testing with thermography. Eur. J. Phys. 34 (6), 91-109 (2013).
- Maldague, X. P. Introduction to NDT by active infrared thermography. Mater. Eval. 60 (9), 1060-1073 (2002).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning pulsed laser spot thermography. Ndt&E Int. 44 (2), 216-225 (2011).
- Lugin, S. Detection of hidden defects by lateral thermal flows. Ndt&E Int. 56, 48-55 (2013).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning laser-line thermography and laser-spot thermography. Meas. Sci. Technol. 22 (3), (2011).
- Pech-May, N. W., Oleaga, A., Mendioroz, A., Salazar, A. Fast Characterization of the Width of Vertical Cracks Using Pulsed Laser Spot Infrared Thermography. Journal of Nondestructive Evaluation. 35 (2), 22 (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. SPIE 9761. Douglass, M. R., King, P. S., Lee, B. L. , Spie-Int Soc Optical Engineering. (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. WCNDT 2016. , 6 (2016).
- Mandelis, A. Diffusion-Wave Fields: mathematical methods and Green functions. , Springer-Verlag. (2001).
- Almond, D., Patel, P. Photothermal Science and Techniques. 10, Chapman & Hall. (1996).
- Salazar, A. Energy propagation of thermal waves. Eur. J. Phys. 27 (6), 1349-1355 (2006).
- Bennett, C. A., Patty, R. R. Thermal wave interferometry: a potential application of the photoacoustic effect. Appl. Opt. 21 (1), 49-54 (1982).
- Busse, G. Stereoscopic depth analysis by thermal wave transmission for nondestructive evaluation. Appl. Phys. Lett. 42 (4), 366 (1983).
- Holtmann, N., Artzt, K., Gleiter, A., Strunk, H. P., Busse, G. Iterative improvement of Lockin-thermography results by temporal and spatial adaption of optical excitation. Qirt J. 9 (2), 167-176 (2012).
- Pribe, J. D., Thandu, S. C., Yin, Z., Kinzel, E. C. Toward DMD illuminated spatial-temporal modulated thermography. Proc. SPIE 9861. , (2016).
- Ravichandran, A. Spatial and temporal modulation of heat source using light modulator for advanced thermography. , Missouri University of Science and Technology. (2015).
- DLP 0.55 XGA Series 450 DMD. , TexasInstruments. (2015).
- Application Note - DLP System Optics. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?baseLiteratureNumber=dlpa022&keyMatch=dlpa022&tisearch=Search-EN-Everything (2010).
- DLP LightCommander Control Software - User Manual. , LogicPD. Available from: https://support.logicpd.com/ProductDownloads/LegacyProducts/DLPLightCommander.aspx?_sw_csrfToken=318b0448 (2011).
- White Paper - Laser Power Handling for DMDs. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?literatureNumber=dlpa027&fileType=pdf (2012).
- Moench, H., et al. High-power VCSEL systems and applications. Proc. SPIE 9348. , (2015).
