

Summary
Denne metode sigter mod at lokalisere vertikale undergrundsfejl. Her kobler vi en laser med en rumlig lysmodulator og udløser dens videoindgang for at opvarme en prøveoverflade deterministisk med to anti-fasede modulerede linjer, samtidig med at man opnår højt solide termiske billeder. Defektpositionen hentes fra evaluering af termisk bølgeinterferensminima.
Abstract
Den fremlagte metode bruges til at lokalisere undergrundsdefekter orienteret vinkelret på overfladen. For at opnå dette skaber vi destruktivt forstyrrende termiske bølgefelter, der er forstyrret af defekten. Denne effekt måles og bruges til at lokalisere fejlen. Vi danner de ødelæggende forstyrrende bølgefelter ved at bruge en modificeret projektor. Projektorens originale lysmotor er udskiftet med en fiberkoblet kraftdiodelaser. Dens stråle er formet og justeret til projektorens rumlig lysmodulator og optimeret til optimal optisk gennemløb og homogen projektion ved først at karakterisere bjælkeprofilen og for det andet korrigere det mekanisk og numerisk. Et højtydende infrarødt (IR) kamera opstilles i henhold til den stramme geometriske situation (herunder korrektioner af de geometriske billedforvrængninger) og kravet om at detektere svage temperaturoscillationer på prøveoverfladen. Dataindsamling kan udføres en gang en synkroniseringRonisering mellem de enkelte termiske bølgefeltkilder, scanningstrinnet og IR-kameraet etableres ved hjælp af en dedikeret eksperimentel opsætning, som skal indstilles til det specifikke materiale, der undersøges. Under data efterbehandling udvindes de relevante oplysninger om tilstedeværelsen af en defekt under prøveens overflade. Den hentes fra den oscillerende del af den overtagne termiske stråling, der kommer fra den såkaldte udtømningslinie på prøveoverfladen. Den præcise placering af defekten er udledt af analysen af den rumlige-temporale form af disse svingninger i et sidste trin. Metoden er referencefri og meget følsom for ændringer inden for termisk bølgefelt. Indtil videre har metoden været testet med stålprøver, men det gælder også forskellige materialer, især temperaturfølsomme materialer.
Introduction
Den laserprojicerede fototermiske termografi (LPPT) -metode bruges til at lokalisere undergrundsdefekter, som er indlejret i prøvenes volumen og orienteret overvejende vinkelret på dens overflade.
Metoden anvender den destruktive interferens af to anti-fasede termiske bølgefelter med den samme forlængelse og frekvens som vist i figur 1b . I isotrope defektfrie materialer neutraliserer de termiske bølger destruktivt ( dvs. nul temperaturoscillation) ved symmetriplanet ved sammenhængende overlejring. I tilfælde af et materiale med en undergrundsfejl udnytter metoden interaktionen mellem de laterale komponenter ( dvs. i plan) mellem den forbigående varmeflow og denne defekt. Denne interaktion kan måles i en genskabt oscillerende temperaturforlængelse ved symmetrilinjen på prøveoverfladen. Nu scannes den defekt indeholdende prøve af det overlejrede termiske bølgefelt ogNiveauet af temperaturforlængelse måles i forhold til prøvepositionen. På grund af symmetri er den destruktive interferens betingelse igen opfyldt, når defekten krydser symmetriplanet; Dette gør det muligt for os at lokalisere defekten meget følsomt. Da niveauet for maksimal forstyrrelse af den ødelæggende interferens korrelerer med fejlens dybde, er det desuden muligt at bestemme dens dybde ved at analysere temperaturscanning 1 .
LPPT kan tildeles den aktive termografimetode, en veletableret ikke-destruktiv metode, hvor forbigående opvarmning genereres aktivt, og den resulterende, også forbigående temperaturfordeling måles via et termisk IR-kamera. Generelt er følsomheden af denne metode begrænset til defekter, som er orienteret i det væsentlige vinkelret på den forbigående varmeflow. Da den styrende forbigående varmeledningsligning er desuden en parabolisk partiel differeNtial ligning, varmemængden i volumen er stærkt dæmpet. Som en følge heraf er sonderingsdybden af den aktive termografimetode begrænset til et nærliggende område, sædvanligvis i millimeterområdet. To af de mest almindelige aktive termografiteknikker er pulset og indlåsningstermografi. De er hurtige på grund af plan optisk belysning 2 , men fører til en forbigående varmestrøm vinkelret på overfladen. Derfor er følsomheden af disse teknikker begrænset til defekter, der overvejende orienteres parallelt ( fx delaminationer eller hulrum) til den opvarmede prøveoverflade. En empirisk regel for pulserende termografi siger, at "radiusen af den mindste detekterbare defekt skal være mindst en til to gange større end dens dybde under overfladen" 3 . For at øge det effektive interaktionsområde mellem en vinkelret orienteret defekt ( f.eks. En revne) og varmestrømmen skal retningen af varmestrømmen væreændret. Lokal excitation ved at bruge en fokuseret laser med et lineært eller cirkulært punkt for eksempel genererer et varmestrøm med en in-plan komponent, som er i stand til effektivt at interagere med den vinkelrette defekt 4 , 5 , 6 , 7 .
I den præsenterede metode bruger vi også de laterale varmestrømskomponenter til at detektere undergrundsdefekter, men vi bruger det faktum, at termiske bølger kan overlejres, mens fejl, især vertikalt orienterede, forstyrrer denne overlejring. På denne måde ligner den fremlagte metode en referencefri, symmetrisk og meget følsom metode, da det er muligt at detektere kunstige undergrundsdefekter med et bredde / dybdeforhold langt under en 8 , 9 . Indtil nu var det svært at skabe to anti-fasede termiske bølgefelter, der leverede tilstrækkelig energi. Vi opnåede denne bY kobler en rumlig lysmodulator (SLM) til en høj-effektdiode laser, som gjorde det muligt for os at fusionere lasersystemets høje optiske effekt med SLM's rumlige og tidsmæssige opløsning (se figur 2 ) i en høj-power projektor . De termiske bølgefelter er nu oprettet ved fototermisk konvertering af to anti-fasede sinusformet modulerede liniemønstre via pixellysstyrken af det projicerede billede (se figur 2 , figur 1a ). Dette fører til struktureret opvarmning af prøveoverfladen og resulterer i veldefinerede destruktivt forstyrrende termiske bølgefelter. For at finde en undergrundsdefekt måles forstyrrelsen af den destruktive indledning som en temperaturoscillation ved overfladen ved hjælp af et IR-kamera.
Udtrykket termisk bølge diskuteres kontroversielt, fordi termiske bølger ikke transporterer energi på grund af varmeudbredelsens diffusive karakter. Alligevel er der bølge-lignende opførsel, når hea Ting med jævne mellemrum tillader os at anvende ligheder mellem reelle bølger og diffusionsprocesser 10 , 11 , 12 . Således kan en termisk bølge forstås som stærkt dæmpet i udbredelsesretningen men periodisk over tid ( figur 1b ). Den karakteristiske termiske diffusionslængde  Beskrives hermed af dets materialegenskaber (termisk ledningsevne k , varmekapacitet cp og densitet p ) og excitationsfrekvensen ƒ. Selvom den termiske bølge er stærkt forfaldende, kan dens bølge natur anvendes til at få indblik i egenskaberne af prøven. Den første anvendelse af termisk bølgeinterferens blev brugt til at bestemme lagtykkelsen. I modsætning til vores metode blev interferensvirkningen anvendt i dybdimensionen ( dvs. vinkelret på overfladen) Ref "> 13. Udvidelsen af ideen om interferens med en anden dimension ved at opdele en laserstråle blev termisk bølgeinterferens brugt til størrelsen af undergrundsdefekter 14. Denne metode blev stadig anvendt i transmissionskonfiguration, hvilket betyder, at den var begrænset af penetrationen Dybden af den termiske bølge.Derudover fordi kun en laser kilde er blevet anvendt, anvendes denne metode konstruktiv interferens, hvilket betyder, at der mangler en defektfri reference. Bortset fra ideen om at anvende termisk bølgeinterferens, er den første tekniske tilgang til rumligt og Temporalt styret opvarmning blev udført af Holtmann et al. Ved anvendelse af en umodificeret LCD-projektor med LCD-projektor med den indbyggede lyskilde, som var stærkt begrænset i sin optiske udgangseffekt 15. Yderligere tilgange af Pribe og Ravichandran med det formål at forøge den optiske Udgangseffekt ved også at forbinde en laser til en SLM 16 , S = "xref"> 17.
Beskrives hermed af dets materialegenskaber (termisk ledningsevne k , varmekapacitet cp og densitet p ) og excitationsfrekvensen ƒ. Selvom den termiske bølge er stærkt forfaldende, kan dens bølge natur anvendes til at få indblik i egenskaberne af prøven. Den første anvendelse af termisk bølgeinterferens blev brugt til at bestemme lagtykkelsen. I modsætning til vores metode blev interferensvirkningen anvendt i dybdimensionen ( dvs. vinkelret på overfladen) Ref "> 13. Udvidelsen af ideen om interferens med en anden dimension ved at opdele en laserstråle blev termisk bølgeinterferens brugt til størrelsen af undergrundsdefekter 14. Denne metode blev stadig anvendt i transmissionskonfiguration, hvilket betyder, at den var begrænset af penetrationen Dybden af den termiske bølge.Derudover fordi kun en laser kilde er blevet anvendt, anvendes denne metode konstruktiv interferens, hvilket betyder, at der mangler en defektfri reference. Bortset fra ideen om at anvende termisk bølgeinterferens, er den første tekniske tilgang til rumligt og Temporalt styret opvarmning blev udført af Holtmann et al. Ved anvendelse af en umodificeret LCD-projektor med LCD-projektor med den indbyggede lyskilde, som var stærkt begrænset i sin optiske udgangseffekt 15. Yderligere tilgange af Pribe og Ravichandran med det formål at forøge den optiske Udgangseffekt ved også at forbinde en laser til en SLM 16 , S = "xref"> 17.
Protokollen, der præsenteres her, beskriver, hvordan man anvender LPPT-metoden til at lokalisere undergrundsdefekter orienteret vinkelret på overfladen af stålprøver. Metoden er på et tidligt stadium, men alligevel kraftigt nok til at validere den foreslåede tilgang Det er dog stadig begrænset med hensyn til den opnåelige optiske udgangseffekt af den eksperimentelle opsætning. Da stigningen i den optiske udgangseffekt forbliver en udfordring, anvendes den fremlagte metode på overtrukket stål indeholdende kunstige elektrisk udladningsbearbejdede hak. Ikke desto mindre er de vigtigste og mest kritiske trin i protokollen, der frembringer en homogen struktureret belysning, opfylder forudsætningerne for destruktiv termisk bølgeinterferens og lokalisering af defekten, stadigvæk ved flere krævende defekter. Da den regulerende mængde er termisk diffusionslængde μ, kan LPPT-metoden også anvendes på mange forskellige materialer.
nt ">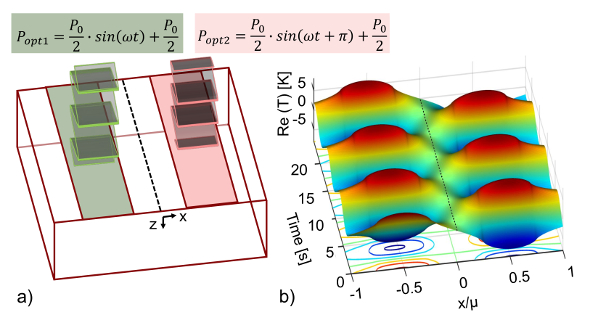
Figur 1: Princippet om destruktiv interferens effekt. ( A ) Skematisk af belysningsmønsteret anvendt under eksperimenter. Prøven opvarmes rumligt og temporært ved to periodisk belyste mønstre med en faseforskydning på π. Den stiplede linje repræsenterer symmetri linjen mellem begge mønstre. Denne linje vil blive brugt til evaluering som en "udtømningslinje". ( B ) Diagram af det rumligt og tidsmæssigt løst alternerende termiske resultat som beregnet ud fra den analytiske opløsning af termisk varmeledningsligning. Den viser de reaktive termiske bølger til belysningen af (a) med en bestråling af de to mønstre med P opt 1 = 1,5 W sin (2π 0.125 Hz t ) + 1,5 W og P opt 2 = 1,5 W sin (2π 0.125 Hz t + Π) + 1,5 W for konstruktionsstål ρ c p = 461 J / (kg · K), k = 54 W / (m · K). Temperaturprofilen på den punkterede linje viser ingen termisk oscillation for homogent, isotropt materiale. Klik her for at se en større version af denne figur.

Figur 2: Skematisk af måleprincippet for struktureret opvarmning, der anvendes i aktiv termografi. En Gaussisk stråle, der er homogeniseret til en top hat profil, anvendes til en rumlig lysmodulator (SLM). SLM løser strålen rumligt ved hjælp af dens omskiftelige elementer og tidsmæssigt ved dens omskiftningshastighed. Hvert element repræsenterer en SLM pixel. I dette eksperiment er SLM en digital mikrospiegel enhed (DMD). Ved at modulere pixellysstyrken A med en tidsdeterministisk styringssoftware, er prøveoverfladenOpvarmes på en struktureret måde. I tilfælde af det præsenterede eksperiment modulerer vi to anti-fasede linjer (faser: φ = 0, π), som er årsagen til kohærent interfererende termiske bølgefelter ved vinkelfrekvensen ω. Bølgefelterne interagerer med prøveens indre struktur og påvirker også temperaturfeltet ved overfladen. Dette måles via sin termiske stråling ved hjælp af et midtbølget infrarødt kamera. Klik her for at se en større version af denne figur.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
BEMÆRK: Forsigtig: Vær opmærksom på lasersikkerhed, fordi opsætningen bruger en klasse 4 laser. Brug venligst de rigtige beskyttelsesbriller og tøj. Håndter også pilotlaseren omhyggeligt.
1. Parodi diodelaser til projektorudviklingssæt (PDK)
- Forbered brødbrættet.
- Monter alle enheder til brødbrættet som vist i figur 3 . Sæt brødbrættet med alle præassemblede enheder i et laserlaboratorium.
- Placer laserfibremonteringen på brødbrættet.
- Fastgør fiberen til laserfibermonteringen ( jf. Figur 3 ).
- Skift lukkertid og laser tærskel for diodelaser. Ved brug af IR-sensorkortet med høj effekt skal du kontrollere udgangsdiameteren (40 mm) af strålen. Sluk for laser tærsklen og piloten på. Juster højden på den optiske akse ved laserfibermonteringen til indgangen til PDK'en ved hjælp afLab jack ( se figur 4a, 4d ).
- Flyt laserfibermonteringen langs skinnen. Overhold pilarlasers position i en afstand. Dets midtpunkt bør ikke bevæge sig. Hvis det gør det, skal du kontrollere monteringen mellem lab jack og laser fiber mount. Fastgør laserfibermonteringen bagefter.
BEMÆRK: Skinnen er referencen til den optiske akse og skal justeres parallelt med brødbrættet. Teleskoplinserne skal fjernes på forhånd.
- Juster teleskopet.
- Brug teleskopet til at reducere strålediameteren fra 40 mm til 15 mm for at passe ind i PDK's indgang ( jf. Figur 4a, 4d ). Brug en 200 mm og en 75 mm plano konvekse linse som henholdsvis henholdsvis første og anden linse. Brug pilotlaseren og tværhårene til at placere den første linse ( jf. Figur 4b ).
- Juster afstanden mellem begge linser groft med stållinien. Brug crosshairs igenAt placere linsen på pilotlaseren. Monter den anden linse på et xy-oversættelsestrin. Brug scenen til at kollimere strålen.
- Juster stråleprøven.
- Hit (med laserstrålen) stråleprøven i en vinkel på 45 °. Brug en anden skinne vinkelret på den første til at placere stråle sampler.
BEMÆRK: Det meste af den optiske effekt afkøles af 500 W effektmåleren. Diodelaserens optiske udgang er mere stabil ved fuld effekt, hvorfor den optiske effekt er opdelt. - Brug irisene i et højdefelt indlæg for at kontrollere den optiske vej langs skinnen ( jf. Figur 4a ) med pilotlaseren.
- Hit (med laserstrålen) stråleprøven i en vinkel på 45 °. Brug en anden skinne vinkelret på den første til at placere stråle sampler.
- Juster spejlet.
- Før du justerer spejlet som vist i figur 4c , skal du fjerne PDK og dens bundplade. Fix en tredje skinne vinkelret på den anden. Kontroller igen den optiske vej gennem iris.
BEMÆRK: Den optiske sti sSkal tilpasses til skinneorienteringen. Strålen skal kollimeres.
- Før du justerer spejlet som vist i figur 4c , skal du fjerne PDK og dens bundplade. Fix en tredje skinne vinkelret på den anden. Kontroller igen den optiske vej gennem iris.
- Demonter og position PDK.
- Før du placerer PDK 18 , skal du fjerne den originale lysmotor.
BEMÆRK: Der var to tidligere linser, der oprindeligt kollimerede LED'erne i PDK 19 ( jf. Figur 4d , indgang). De limes og skal fjernes ved brug af acetone. - Indstil PDK'ens platform til at være parallel med den tredje skinne og dermed til den optiske akse af strålen. Brug crosshairs indstillet til PDK's indgang for at placere PDK i forhold til strålen. Bliv justeret parallelt. Sluk pilotlaseren, fordi den er for svag til at passere PDK.
- Før du placerer PDK 18 , skal du fjerne den originale lysmotor.
- Projekt et hvidt billede for at kontrollere den optiske effekt.
- Sørg for, at PDK'ens HDMI-kabel og USB-kabel samt datakøbet (DAQ) -kortet er sluttet tilKontrol pc. Tilslut portene i laser kontrolboksen til "laser lukker", "laser tærskel" og "laser på" til DAQ kortet. Tilslut "Laser Control Spænding" -porten på kontrolboksen scanneren til DAQ-kortet.
- Start PDK-styringssoftwaren 20 og konfigurer den som en almindelig projektor som følge af trinene i.1 til i.3 i figur 5b . Aktivér den anden skærm og sørg for, at der ikke er noget vindue inden for den anden skærm. Brug en hvid desktop baggrund og kontroller projektorens funktion med LED flash-lampen som input lyskilde.
BEMÆRK: Hvis et hvidt billede projiceres til billedplanet for PDK, virker enheden korrekt.
- Kontroller optisk indgangseffekt.
- Anbring 30 W strømmålerhovedet, der er fastgjort til effektmålerens styreenhed i den optiske vej foran PDK'en ( jf. Figur 4e - position 1). Skift diodelaserPå med LPPT-laserstyringssoftwaren efter trin i.1 til i.3 i figur 5a ) ved et lavt strømniveau i trin i.1 = 0,5 V.
BEMÆRK: LPPT-laserstyringssoftwaren skifter DAQ-kortet, der skifter laserstyringsudgange ( jf. 1.7.1). Overvej lasersikkerhed, brug briller og beskyttende tøj! - Kontroller strømmålerens sensorposition med IR-sensorkortet med høj effekt. Hold IR-kortet ind i strålen og se det gløde. Match strålediameteren til effektmålerens sensorområde ( Figur 3 ).
- Kontroller den maksimale optiske indgangseffekt ved indgangen til PDK (igen følg figur 5a ), trin i.1) med en værdi på 10 V.
BEMÆRK: Den optiske indgangseffekt ved indgangen til PDK bør være maksimalt ca. 22 W 21 . Ved denne konfiguration blev målingstider op til 5 minutter tolereret uden at ødelægge SLM, hvilket er tilfældet, hvis PDK blev realiseret som en digital mikromirroranordning (DMD). - Kontroller den optiske udgangseffekt.
- Placer 30 W strømmålerhovedet i en omtrentlig afstand på 60 mm til PDK'en ved hjælp af af = 60 mm objektiv fastgjort til PDK-målet ( jf. Figur 4e ).
- Placer LED-blitzen ved projektorens indgang ( se figur 4d ) og tænd den. Finjustér positionen af effektmålerehovedet, så det samler lyset af det projicerede billede som vist i figur 4e . Fjern LED-blitzlyset bagefter.
- Start LPPT-laserstyringssoftwaren. Indtast '0,5 V' i feltet 'spænding' og klik på 'Laser On!' knap. Læs den optiske effekt fra effektmålerens styreenhed. Stop laseren ved at klikke på "Stop" knappen. Gentag disse trin for 2 V, 6 V, 10 V ( jf. Figur 5a , i.1 til i.3).
BEMÆRK: Hvis en spænding på 10 V giver en optisk udgangseffekt på &# 62; 4 W, den indledende test er vellykket. Ellers skal den optiske justering kontrolleres. Prøv at maksimere den optiske udgangseffekt ved fint at justere spejlet.
- Mål stråleprofilen.
- Brug en fotodiode med forstærker og pinhole til at måle bjælkeprofilen for det resulterende projicerede billede ( jf. Figur 4f ). Hvis en bjælkeprofil er tilgængelig, skal du bruge denne enhed, men svække bjælken.
- Fastgør fotodioden til et oversættelsestrin, som selv er monteret på en beslag. Tilslut også et neutraltæthed (ND) 1 reflekterende filter og 1 mm pinhul til dioden. Placer fotodioden oven på et motoriseret oversættelsestrin og lab jack. For at opnå højde, brug to brødbræt (100 mm x 100 mm).
- Brug af = 100 mm objektiv efter PDK-målet ( jf. Figur 4e ) og projekt et hvidt billede ved hjælp af LED-blitzen ( se trin 1.7). Flyt fotodioden til billedplanet ogSørg for, at fotodiodens rækkevidde, der bevæger sig i oversættelsestrinn, ligger inden for det projicerede billede ( jf. Figur 4f ).
- Tilslut fotodioden til strømforsyningen og DAQ-kortet. Brug 40 dB forstærkning til 6 V styrespænding til optisk laser effekt. Tilslut bevægelsesstyringen til det motoriserede oversættelsestrin til kontrol pc'en.
BEMÆRK: LPPT-intensitetssoftwaren styrer bevægelsen af den pinholede fotodiode gennem det belyste område ved en konstant hastighed på v = 0,1 mm / s og optager foto diodesignalet ved 100 kHz. Laseren styres også via software. - Brug mikrometerskruen på scenen i trin på 1 mm som vist i figur 4f for at scanne billedet. Se resultater vist i figur 6a-6b .
- Beregn korrektionsbilledet.
- For at korrigere stråleprofilens inhomogenitet beregner du en inverteret pixelmatrix angående strålenprofil. Identificer rækkevidden af det projicerede billede ved hjælp af en kantdetekteringsalgoritme.
- Transform tid information til rumlige oplysninger ved hjælp af scenens hastighed. Omdanne den rumlige information til pixel-domænet i PDK'et med x = 1.024 pixel og y = 768 pixel. Normaliser diodesignalet til den maksimale værdi.
BEMÆRK: Referenceniveauet for korrektion blev valgt med gennemsnittet af alle normaliserede billedværdier. Dæmpningsniveauet beregnes med:
P Pixel er den normaliserede diodeintensitet pr pixel. Værdierne af Pixel LC over 1 er sat til 1. - Multiplicér korrektionsmatrixen ( jf. Figur 6c ) med et hvidt billede og mål profilen igen for at kontrollere om korrektionen var tilstrækkelig ( jf. Figur 6e-6h ).
2. Forbered prøven
- Anbring 30 W strømmålerhovedet, der er fastgjort til effektmålerens styreenhed i den optiske vej foran PDK'en ( jf. Figur 4e - position 1). Skift diodelaserPå med LPPT-laserstyringssoftwaren efter trin i.1 til i.3 i figur 5a ) ved et lavt strømniveau i trin i.1 = 0,5 V.
- Brug to blokke på 100 mm x 100 mm x 40 mm konstruktionstål St37 som prøveemne med en tæthed på ρ = 7.850 kg m -3 , varmeledningsevne k = 54 W · m -1 · K -1 og varmekapacitet Af c p = 461 J · kg -1 · K -1 .
- Indsæt kunstige defekter i to blokke ved 0,25 mm, 0,5 mm, 0,7 mm, 1,25 mm og 1 mm, 1,5 mm, 1,75 mm, 2 mm ved elektrisk udladning bearbejdning under overfladen som vist i figur 7 .
- Tape defekterne med beskyttelsestape. Sandblast den øverste overflade for at få homogen absorption. Tape defekterne med beskyttende tape før belægning. Affedt overfladen ved hjælp af acetone.
- Belæg det oplyste område med grafitspray fra 30 mm afstand to gange (0 ° og 90 °). Belægningen er vellykket, hvis der er en homogen overflade. Hvis belægningen ikke er intakt, skal du begynde affedtning og rengøring igen og gentageBelægningstrinnet. Tør overfladen ~ 2 timer. Rør ikke overfladen, det vil ændre emissiviteten.
- Fjern båndet, og sørg for, at grafit ikke kommer ind i undergrundsdefekten.

3. Forbered eksperimentet
- Forbered PDK og diode laser.
- Projekt et hvidt billede som beskrevet i trin 1.7). Kontroller den optiske indgangseffekt af PDK'en som beskrevet i trin 1.8). Kontroller den optiske udgangseffekt af PDK som vist i trin 1.9).
- Tilslut 500 W strømmålerhovedet til effektmålerens styreenhed, og tilslut strømmåleren til styreenheden (pc) via et USB-kabel.
- Klargør bevægelsesstyringen og placer prøven.
- Tilslut bevægelsesstyringen til oversættelsestrinnet og til styreenheden via et USB-kabel. Placer translationstrinet ortogonalt til den optiske akse i en afstand på omkring 80 mm i forhold til PDK.
BEMÆRK: LPPT-softwarenE, der kører på kontrolcomputeren styrer bevægelsesstyringen. - Fastgør f = 100 mm objektiv til PDK-målet. Brug LED-blitzlyset som input lyskilde ( jf. Figur 4d , krydset mærker indgangen) til PDK for at finde projektorens billedplan.
- Placér et hvidt ark papir i en omtrentlig afstand på 100 mm foran målet og bevæg det frem og tilbage for at finde det skarpe belyste rektangels plan, hvilket er billedplanet.
- Placer den overtrukne prøveoverflade på dette plan. Indstil højden af prøven ved hjælp af lab jack monteret til den lineære translations fase. Vælg højden således, at toppen af det belyste rektangel rammer prøvenes top ( jf. Figur 4g ). Angiv fejlen, at den ligger inden for det belysede område.
- Nul bevægelsesstyringen ved at slukke og tænde enheden igen.
- Tilslut bevægelsesstyringen til oversættelsestrinnet og til styreenheden via et USB-kabel. Placer translationstrinet ortogonalt til den optiske akse i en afstand på omkring 80 mm i forhold til PDK.
- Klargør kameraet og placer guldspeilet.
- Brug LED-blitzlyset som input lyskilde til projektoren til at projicere et hvidt billede til prøven.
- Placer guldspejlet i en højde, så den ser øvre kant af prøven ( figur 4g ). Sæt spejlet i en vinkel på ca. 35 ° som det er vist i figur 3 . Placer guldspejlet så tæt som muligt på PDK-målet, men ikke skygge fremspringet.
BEMÆRK: Spejlet er fastgjort til et indlæg i en monteret stolpe. Højden og positionen er fastgjort af klemmer. - Monter IR-kameraet på stativet. Niveau IR kameraet med Bullseye niveau. Juster IR-kameraet til højden af PDK-målet. Placer det sådan, at det ser det projicerede hvide billede over guldspejlet.
BEMÆRK: Den omtrentlige afstand langs den optiske vej er omkring 1 m. - Brug afstandsringen mellem IR-kameraets mål og IR-kameraet. LaveSørg for, at kameraets triggerindgang er forbundet til måledatakøbskortet for at udløse rammen. Tilslut også IR-kameraets styre-pc til IR-kameraet via LAN-kablet.
- Tænd for kameraet og vent mindst for opvarmningstiden ( ca. 30 min).
- Start IR kamera kontrol software. Skift menubjælkeelementet til "Kamera". Klik på knappen "Connect" for at forbinde IR-kameraet ( se figur 8a , trin i.1).
BEMÆRK: Kameraet viser et levende billede af scenen. - Klik på knappen "Fjern" for at åbne panelet "Fjernbetjening" ( jf. Figur 8d , trin i.2). Vælg kalibrering "HF 100mm (-10 ° C - 60 ° C) 1140 μs". Se figur 8d , trin i.2.1.
BEMÆRK: Kalibreringsområdet skal være så lille som muligt for at reducere støj. - Juster objektivfokusringen manuelt for at fokusere IR-kameraet til thE prøveplan.
BEMÆRK: Det er vigtigt, at kameraets synsfelt er så stort som det maksimale projicerede område for at få den maksimale rumlige opløsning ( jf. Figur 4g ). Man må muligvis ændre position, højde og orientering af IR-kameraet. For at afgøre, om et billede er skarpt, behøver man en temperaturkontrast på billedplanet. En stållinie kan bruges til at generere en kontrast. Hvis IR-billedet stadig har lav kontrast, kan man justere det ved hjælp af markeringsværktøjet ( se figur 8c , i.3) - Udfør en ikke-ensartethedskorrektion ved at klikke på knappen "NUC" ( jf. Figur 8d , trin i.2.2). Dæk IR-kameraets mål og klik på knappen "ok".
- Bestem forholdet mellem IR-kameraets pixeldomæne og projektorkoordinater.
- Bestem forholdet mellem PDK pixel domæne, IR kamera pixel domæne og leNgth skala af prøven ved at projicere et hvidt billede eller mønster til prøveoverfladen ( jf. Figur 4 g, h ). Mål det projicerede område ved hjælp af en stållinie, der giver forholdet mellem PDK-domænet og prøveens længde skala.
- Brug f = 100 mm objektiv fastgjort til PDK-objektivet for at få et oplyst område på 21,3 mm x 16 mm (4: 3).
BEMÆRK: Længde skalaen i PDK koordinater er: 1 projiceret pixel = 21,3 mm / 1,024 pixel - Find forholdet mellem PDK og IR kamera. Gentag trin 1.9.3) for 10 V.
- Brug IR-kameraets software til at ændre menulinjenheden til "Mål". Vælg "Krydsværktøj" fra værktøjslinjen "Målområder" ( jf. Figur 8c ), trin i.4). Marker hjørnerne af det resulterende termiske billede ved at venstre klikke på den viste ramme.
- Højreklik på korset for at komme til ejendomsvinduet. Skift til "koordinater" og optag dem forSenere transformation af det termiske billede til PDK koordinatsystemet.
4. Gennemfør eksperimentet
- Forbered eksperimentet.
- Estimatbelysningsareal i forhold til prøveens længde skala.
- Brug f = 100 mm objektiv for at opnå et belyset område på 5,5 mm x 16 mm pr. Mønster. Vælg et område på 5,5 mm x 16,5 mm imellem dem, der ikke lyser.
BEMÆRK: Den resulterende bestråling er ca. 1,2 W / cm2.
- Brug f = 100 mm objektiv for at opnå et belyset område på 5,5 mm x 16 mm pr. Mønster. Vælg et område på 5,5 mm x 16,5 mm imellem dem, der ikke lyser.
- Estimatbelysningsareal i enheder i forhold til PDK pixel domænet.
- Transformér den belyste mønsterposition til PDKs pixeldomæne (1.024 pixels x 768 pixels) ved hjælp af ligningen i trin 3.4.2). Brug [(512, 1); (512, 768)] pixel i PDK-domænet som udtømningslinjen, som er symmetrisk mellem begge mønstre.
- Beregn totalt antal rammer, målingstid og rammer peR periode. Hvis man antager en hastighed på v = 0,05 mm / s, beregnes en trinafstand på x = 10 mm og en PDK-rammehastighed ƒ r = 40 Hz, beregningstiden t via t = x / v = 200 s. Beregn også antallet af rammer nej ƒ = ƒ r • t = 8.000. Med en eksitationsfrekvens på ƒ = 0.125 Hz beregner du rammerne per periode p med p = nej ƒ / t ƒ = 320 rammer / periode.
Bemærk: Disse værdier bruges til at generere de projekterede billeder. - Kontroller opsætningen og sørg for, at lasersystemet, IR-kameraet og (eventuelt) temperaturstyringen er tilsluttet til DAQ-kortet. Kontroller, om 500 W strømmåler, PDK og lineær fase er tilsluttet til styre-pc'en.
- Estimatbelysningsareal i forhold til prøveens længde skala.
- Indstil kameraets kontrol pc.
- Konfigurer IR kamerastyringssoftwaren til at gribe en ramme, når IR-kameraet modtager en triggerindgang. For dette sHeks til panelet "Kamera" og klik på knappen "Fjern" ( se figur 8a , trin i.2) for at åbne fjernbetjeningspanelet. Vælg "Process IO" i rullemenuen ( Figur 8d , trin i.2.3) og aktiver "Sync In" og "Gate" og lukk menuen.
- Åbn opkøbsmenuen ved at klikke i nederste højre hjørne af fanen "Acquisition parameters" ( se figur 8a , i.5). Vælg "Ext / Sync" fra rullemenuen ( se figur 8b , i.5.1). Navngiv målingen ved at indtaste fil- og mappenavne i feltet "Mappe" (se figur 8b , i.5.2).
- Indtast det samlede rammenummer beregnet fra trin 4.1.3 i feltet "count" ( jf. I.5.3). Luk opkøbsmenuen, og klik på "Optag" -knappen for at starte IR-kameraets dataindsamling ( jf. Figur 8 , i.6).
BEMÆRK:Kun optagelsen finder sted, hvis der er en triggerindgang fra DAQ-kortet.
- Udfør eksperimentet.
- Start LPPT-styringssoftwaren. Aktivér bevægelsesstyringen ved at klikke på "Aktiver?" Knappen ( figur 9a , i.1). Indstil de rejseparametre "StartPosition" = "-5 mm", "EndPosition" = "5 mm" og "Velocity" = "0.05 mm / s" ved at redigere de tilsvarende navngivne felter som vist i Figur 9a , i.1. Klik på knappen "Startmåling" (se figur 9a , i.2).
BEMÆRK: Hvis det er uklart, hvor defekten er placeret, skal du vælge en større rejseafstand ved en højere hastighed. Vær opmærksom på stigningen i temperaturen på PDK, og mængden af data skabt. Bemærk, at en brugergrænseflade til generering af rammebillederne vises ( se figur 9b ). - Generer de projicerede frame billeder. <ol>
- Venstre klik på feltet "Vælg område farve". Vælg en farve for mønsterområdet fra farvedialogen ( Figur 9 , i.3). Vælg værktøjet 'rektangel' fra tegneværktøjslinjen øverst i venstre hjørne.
- Tegn et rektangel på billedområdet ved at venstre klikke og holde mens du strækker sig over billedområdet. Brug de transformerede mønsterkoordinater fra trin 4.1.2) til at dimensionere rektangelkoordinaterne vist i venstre nederste hjørne (i.4). Klik på knappen "Definer område" ( figur 9b , i.5).
BEMÆRK: De beregnede pixelkoordinater i PDK-domænet for 5,5 mm mønsterstørrelse er: Rektangel 1 (x1 = 116, y1 = 1; x2 = 380, y2 = 768), rektangel 2 (x1 = 644, y1 = 1; x2 = 908, y2 = 768). Når du har klikket på knappen "Definer område", vises en dialog for indstilling af mønsteregenskaberne.
- Start LPPT-styringssoftwaren. Aktivér bevægelsesstyringen ved at klikke på "Aktiver?" Knappen ( figur 9a , i.1). Indstil de rejseparametre "StartPosition" = "-5 mm", "EndPosition" = "5 mm" og "Velocity" = "0.05 mm / s" ved at redigere de tilsvarende navngivne felter som vist i Figur 9a , i.1. Klik på knappen "Startmåling" (se figur 9a , i.2).
- Indstil mønsteregenskaberne ( figur 9c , i.6).
- Vælg "sinusbølge" fraDrop down menu ved venstre klik på feltet "Signal Type". Definer oscillationsparametrene ved at indstille felterne "Phase Shift" til "0 °", "Frekvens" til "0.125 Hz" og "Amplitude" til "127" (faseforskydning 0 for det første mønster og en faseforskydning af π for Sekundet).
- Indstil laserspændingen til 10 V ved at indsætte "10" til feltet "Spænding". Indsæt 320 i feltet "Billeder / periode" ved hjælp af værdien fra trin 4.1.3). Tryk på "Næste" knappen; Dette lukker panelet.
BEMÆRK: LPPT-styringssoftwaren beregner en periodisk billedstrøm ved opløsningen af PDK. Som en hvid pixel betyder maksimal optisk effekt og en nulpunkt i sort pixel, beregnes to oscillerende mønstre. Den grå værdi af det første mønster beregnes med P1 = 127 sin (2π 0.125 Hz t ) + 127 og den for den anden med P2 = 127 sin (2π 0.125 Hz t+ Π) + 127 (se figur 2 , graf), mens tiden t diskretiseres til den valgte billedhastighed ( jf. Trin 4.3.4).
- Opret det andet projicerede mønster.
- Gentag trin 4.3.2) og 4.3.3) efter arbejdsgangen i Figur 9, men med en anden farve og en anden "Faseskift" på "180 °". Klik på knappen "Beregn rammer" for at beregne de projicerede mønstre. Indstil PDK- og IR-kameraets billedhastighed til at være "40 Hz" i dialogboksen, der dukker op.
- Indlæse korrektionsbilledet.
- Følg arbejdsgangen i figur 9b ), trin i.12. Vælg panelet "load correction", og giv filen til det beregnede billede fra trin 1.11). Indsæt korrektionsbilledet ved at klikke på knappen.
- Start målingen ved at klikke på knappen "Start" ( se figur 9b , trin i.13).
BEMÆRK: De beregnede rammer bliver projiceret på prøven, mens scenen bevæger sig. Rammerne vil blive erhvervet og talt af IR-kameraets styringssoftware. - Stop målingen, når alle rammer opkøbes (fremdriftslinje = 100%) ved at klikke på knappen "Stop Measurement" ( se figur 9a , i.14).
BEMÆRK: Knappen på knappen ændres, hvis den klikkes.
5. Efterbehandle datafilen
- Start LPPT-efterbehandlingssoftwaren. Klik på "load" knappen og vælg målefilen i fildialogboksen. Klik på "OK" for at omdanne kameraformatformatet til postbehandlingsdataformat ( jf. Figur 10a ).
BEMÆRK: IR-kameraets data gemmes på IR-kameraets kontrol-pc i et oprindeligt format. IR-kameraets styringssoftwareudviklingssæt bruges til at konvertere IR-kamerasekvensen til en 3-dimensionel matrix (pixel X, pixel Y, rammenummer) og enHeader inklusive en timing vektor t. - Transform IR-kamera data til PDK-domænet ( se figur 10b ) ved at indsætte koordinaterne for de fire projektionspunkter P1x til P4y fra trin 3.4.3) og klikke på "Transform".
BEMÆRK: På grund af billedfremspring via guldspeilet til IR-kameraet ( jf. Figur 4g ) forvrides det resulterende IR-billede. En affine geometrisk transformation udføres fra IR kamera domænet til PDK domænet. Resultatet er en matrix med størrelse 1.024 x 768 x rammenummer. - Udtræk temperaturinformation ved udtømningsledningen ( jf. Figur 10c ).
- Definer udtømningslinjen med to punkter L1 og L2 ved at udfylde felterne L1x = Lx2 = "512" pixel som det allerede var valgt i trin 4.1.2). Vælg y fra L1y = "343" til L2y = "393". Se figur 10c .
BEMÆRK: På grund af transformationen i trin 5.2) kan dataene væreHentes med det samme, men bivirkninger opstår, fordi prøven kun er delvis belyst. Derfor må du ikke evaluere kanten af mønstrene. Hvis lyden stadig er for høj, kan størrelsen på y øges. - Indstil eksperimentelle parametre for IR-kameraet ved at udfylde følgende felter: FrameRate som "40" Hz, frekvens som "0.125" Hz, hastighed v som "0.05" mm / s og startposition xStart som "-5" mm ( jf. Figur 10c ). Indstil parametrene til data efterbehandling: "Fit Degree" = "7", "Smoothing" = "20" og "Hilbert" = "500" som i figur 10c .
BEMÆRK: De data, der udvindes ved udtømningslinjen, er geometriske gennemsnitlige. Derefter hentes den vekslende temperatur termen Δ T (se figur 11a, b ) ved at udføre en polynomisk pasform (Fit Degree). Det resulterende signal glattes af et glidende gennemsnitsfilter (udjævning).Endelig påføres en Hilbert-transformation for at hente den øjeblikkelige amplitude. Et andet glidende gennemsnitsfilter (Hilbert) påføres for at reducere resterende krusninger. Ved hjælp af oplysninger om amplitudeminimum opnås den skjulte defekts position. - Klik på "Evaluer" for at udføre dataanalysen. Læs den beregnede position af defekten fra feltet "CrackPosition [mm]". Fejlpositionen vises i vinduet i Figur 10d .
- Definer udtømningslinjen med to punkter L1 og L2 ved at udfylde felterne L1x = Lx2 = "512" pixel som det allerede var valgt i trin 4.1.2). Vælg y fra L1y = "343" til L2y = "393". Se figur 10c .

Figur 3: Fotografi af den eksperimentelle opsætning med fremhævet optisk sti (rød linje). Laserfibermonteringen er fastgjort til diodenlasers fiber. Bjælken justeres af teleskopet til PDK's indgangsdiameter. Før du går ind i PDK'en, deles strålen af stråleprøven og overvåges af effektmåleren. Inde i PDK'en er strålen homogeniseret aNd projiceret til en DMD. PDM'et, der styres af LPPT-styringssoftwaren, projekterer belysningsmønstre til prøven. Det projicerede lys er fototermisk omdannet og opvarmer prøven. Temperaturen måles af et IR-kamera via den termiske stråling (orange linje), der udsendes fra prøveoverfladen. Selve prøven er placeret på den lineære translationsstrin. Klik her for at se en større version af denne figur.

Figur 4: Fotosekvens, der viser justeringen af eksperimentets opsætning. ( A ) Set ovenfra af den eksperimentelle opsætning viser et overblik. ( B ) Justering af teleskopet: Tværhårene bruges til at centrere linsen til laserstrålens optiske akse. ( C ) Justering af de optiske elementer: Et stangsystem mounteD til den optiske bænk bruges til at justere den optiske stråle i forhold til bænken. En højdefast iris bruges til at holde strålen parallelt med bænken. ( D ) Billede af sidebillede af koblingspunktet mellem projektor og stråle. Tværhårene bruges til at justere projektoren til bjælken. ( E ) Bestemmelse af projektorsystemets transmission: Effektmåleren bruges til at måle den optiske effekt før og efter projektoren. ( F ) Bestemmelse af bjælkeprofilen: Pinhole- og ND1-filteret er monteret på dioden, som bevæges via to lineære trin gennem det projicerede billede. Projektoren skal konfigureres til at projicere et hvidt billede. ( G ) Placering af det infrarøde kamera til prøven via et guldspejl: Prøven skal placeres i projektorens billedplan. For at styre strømtætheden kan objektivet og yderligere linser, der er knyttet til målet, anvendes. ( H ) BestemmelseAf skalaen mellem projiceret billede, IR kamera billede og den faktiske længde af prøven. Klik her for at se en større version af denne figur.

Figur 5: Software screenshots. ( A ) Skærmbillede af LPPT-laserstyringssoftware. ( B ) PDK-styringssoftware: Trin i.1 til i.3 viser, hvordan man konfigurerer PDK som en almindelig projektor. Klik her for at se en større version af denne figur.

Figur 6: Korrektion af den inhomogene stråleprofil. ( A ) Bjælkeprofil for det projicerede hvide billede (fuld belysning) taget af a Fotodiode, der blev flyttet gennem profilen. Dataene viser en inhomogen stråleprofil med en fremtrædende top i midten. ( B ) Tværsnitslinjeprofilen svarer til den røde linje i a). ( C ) Korrektionsbillede, som overlejres på SLM med det projicerede hvide billede for at reducere niveauet af inhomogenitet. ( D ) Den tilsvarende tværsnitslinieprofil for den røde linje i c). ( E ) Resultatstråleprofil efter korrektion, der viser en profil tættere på en top hat profil. ( F ) Den tilsvarende tværsnitslinieprofil for den røde linje i e). ( G ) Belysningsprofil for to korrigerede mønstre. Mønstrene vil blive moduleret med samme frekvens og amplitude, men med modstridende faser, der skaber en zone med destruktiv interferens mellem mønstrene. ( H ) Den tilsvarende tværsnitslinieprofil for den røde linje i g). Ve.com/files/ftp_upload/55733/55733fig6large.jpg "target =" _ blank "> Venligst klik her for at se en større version af denne figur.

Figur 7: Prøveforberedelse. ( A ) Foto af prøveoverfladen, der viser en blok af svagt belagt strukturstål St37 (20 mm x 0,5 mm x 15 mm). ( B ) Gennemsigtig CAD tegning af undergrundsfejlene. Manglerne er placeret 40 mm fra højre side. C ) Sidebilleder af prøverne, der viser de idealiserede defekter på forskellige dybder under overfladen (side 1 = 0,25 mm, side 2 = 0,5 mm, side 3 = 0,7 mm, side 4 = 1,25 mm). Prøvesiderne er ikke overtrukket for at reducere varmetab. Den anden prøve (ikke vist) har dens underfladefejl ved: side 1 = 1 mm, side 2 = 1,5 mm, side 3 = 1,75 mm, side 4 = 2 mm.= "_ Blank"> Venligst klik her for at se en større version af denne figur.

Figur 8: Skærmbilleder af IR-kameraets styringssoftware. Trin I.1 til I.5 viser, hvordan du konfigurerer IR-kameraet til dataindsamling. ( A ) Skærmbillede af "Kamera" -panel: IR-kameraet kan sluttes til IR-kameraets styre-pc via "Connect" -knappen. Fjernbetjeningspanelet (b) og opkøbspanelet (d & e) kan nås herfra. Endvidere kan målingerne startes via "Record" -knappen. ( B ) Skærmbillede af panelet "Acquisition": IR-kameraet skal konfigureres via "Ext / Sync" for at optage en ramme, hvis den modtager en 5 V TTL-trigger. ( C ) Skærmbillede af "Mål" panel: Data displayområdet kan justeres med "Selection" knappen. Punkt- og linjeværktøjerBruges til at kalibrere IR kamera billedet til virkelige verdenskoordinater. ( D ) Skærmbillede af IR kamera fjernbetjening "Kalibreringer" panel. Et lille målområde (-10 til 60 ° C) skal vælges for at opnå høj følsomhed. ( E ) IR-kameraets fjernbetjeningspanel: "Process-IO", "IN1" og "IN2" skal aktiveres for at udløse IR-kameraet. Klik her for at se en større version af denne figur.

Figur 9: Skærmbilleder af LPPT-styringssoftwaren. Workflow for brugerinteraktioner med softwaren er markeret med trin i.1 til i.14. ( A ) Skærmbillede af LPPT hovedpanelet; "Aktiveret?" Er en boolsk type og aktiverer scenen hvis den er sand. "Start-" og "EndPosiFeltet "Hastighed" er defineret i mm / s. "Startmåling" -knappen begynder at måle, åbner dialogboksen vist i panel (b) og stopper målingen hvis den er falsk. ( B ) Skærmbillede af brugergrænsefladen, der bruges til at oprette mønstre projiceret til prøven. En farve er valgt til at repræsentere et område af pixels. Området vælges ved at tegne rektangler til billedet. Hvis knappen "definer område" trykkes, Panelet, der vises i panelet (c), kommer op for at definere områdets egenskaber. Når alle områder er defineret, beregner knappen "calc Frames" et sæt billeder. "Load Correction" vil give en dialogboks for at indlæse korrektionen Billede for at undgå en inhomogen stråleprofil. Knappen "Start" vil starte målingen ( c ) Skærmbillede af brugergrænsefladen, der bruges til at indstille egenskaberne for et mønster. Den øverste ramme viser signaltype (sinusbølge), faseskiftI grader og frekvens i Hz. Den nederste ramme viser rammer pr. Periode, amplitude fra 1 til 127 og laserspænding (0 V til 10 V = 0 W til 500 W). Rammer pr. Periode er den værdi, der repræsenterer, hvor fint en periode er diskretiseret. Når knappen "Næste" (længere) er skubbet op, fremkommer en dialogboks og beder om kameraframmebelastning i Hz og rammeomskiftningshastighed i Hz. Klik her for at se en større version af denne figur.

Figur 10: Skærmbilleder af LPPT efterbehandlingssoftware. ( A ) Indlæs og transformer det native IR-kameraformatformat. ( B ) Transformér rammatrixen til projektorens koordinatsystem ved at bruge transformationspunkterne P1x til P4y. ( C ) L1x til L2y repræsenterer pixelkoordinaterne for den evaluerede linje. &# 34; v "," xStart "," FrameRate "og" Frequency "er eksperimentelle parametre." V "er hastigheden i mm / s," xStart "startpunktet for scenen i mm," FrameRate "og" Frequency "Er angivet i Hz." Fit Degree "," Smoothing "og" Hilbert "er evalueringsparametre. Fit Degree repræsenterer graden af polynomisk pasform." Udglatning "repræsenterer antallet af elementer til et glidende gennemsnitsfilter, der bruges til at reducere støj og Parameteren "Hilbert" bruges til at indstille niveauet af udglatning for at finde minimum af kurven. ( D ) Skærmbillede af resultatet, der viser sprængpositionen som en lodret stiplede linje. Klik venligst her for at se en større version af denne figur.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Efter protokollen blev side 1 af stålprøven med en undergrundsdefekt i en dybde på 0,25 mm valgt for at generere repræsentative resultater. Defekten blev oprindeligt anbragt ca. i midten af det belyste område. Prøven blev derefter flyttet fra -5 mm til 5 mm via det lineære trin med en hastighed på 0,05 mm / s. Ved hjælp af disse parametre viser figur 11a scanningsdataene efter ekstraktion af dem fra udtømningslinjen. På dette stadium kan eksperimentets succes estimeres, da de rå data er tilgængelige fra IR-kameraets kontrolsoftware som et eksempel (valgfrit: Brug linjeværktøjet til at forhåndsvise dataene, jf. Figur 8 , trin i.4) . Efter yderligere signal efterbehandling viser figur 11b defektpositionen i det mindste af Hilbert-kurven (blå) ved 0,3 mm.
For at validere eksperimentet skal kurven hAve følgende egenskaber: den skal være symmetrisk, have et udtalt minimum ved symmetriplanet og to lige store maxima til venstre og højre. Maxima opstår, fordi varmestrømmen fra en af linjekilderne dominerer over den anden på grund af varmeens akkumulering ved defekten. Dette er især tilfældet, når defekten er placeret tæt på symmetriplanet. Defekten danner en barriere for varmestrømmen, så vi kan observere varmestrømmen af den dominerende kilde og dens refleksion fra defekten. Hvis defekten er placeret symmetrisk i midten, opdeles varmeflowet ens, hvilket resulterer i et minimum på 1 .
Effekten af scanningshastigheden er vist i figur 11c . Her blev scanningshastigheden fordoblet til 0,1 mm / s for at vurdere den samme fejl. Først blev prøven forskudt let på scenen for at opnå en anden relativ position. Defektpositionen blev bestemtAt være -2 mm. Forlængelsesniveauet lignede de data, der er vist i figur 11a , hvilket demonstrerer god reproducerbarhed af eksperimentet, men med færre oscillationer. Da den maksimale forlængelse korrelerer med fejlens dybde, kan oplysninger om position og dybde også opretholdes 1 .
Figur 11d viser et suboptimal datasæt. Defekten var 1 mm under overfladen, hvilket er næsten ved detektionsgrænsen for denne diffusionslængde og den tilgængelige optiske effekt. Selv om fejlens placering stadig kan bestemmes, er måleusikkerheden større, fordi placeringen af nuloscillationen allerede er påvirket af støj. Fra denne adfærd kan vi konkludere, at de mest oplagte tegn på fejl i detektionseksperimentet er, hvis udtømningslinjen forsvinder fuldstændigt, eller hvis der er en stærk asymmetrisk adfærd. Dette kan skyldes folloFløjsårsager: (i) IR-kameraets rumlige opløsning er ikke tilstrækkelig, og udløbsledningen kan ikke løses ordentligt, (ii) støj fra kameraet er for høj i forhold til temperaturstigningen, (iii) belysningsmønsteret er Inhomogen og ikke korrigeret korrekt, (iv) den valgte scenehastighed er for høj i sammenligning med modulationsfrekvensen af belysningsmønstret, og (v) termisk diffusionslængde (via modulationsfrekvensen) ikke er tilpasset defekten dybde.

Figur 11: Repræsentativt datasæt fra eksperimenter for at lokalisere undergrundsdefekter. ( A ) Repræsentative eksperimentelle data fra St37-prøven, side 1 med en defekt på en dybde på 0,25 mm. Den sorte linje viser temperaturinformation over tid (øverste akse). Ved at oversætte scenen med hastigheden v = 0,05 mm / s er positionenHentet (nederste akse). Den røde kurve viser en polynomisk pasform (7. grad), der bruges til at opnå den vekslende temperaturkomponent. Den stiplede røde linje repræsenterer positionen af undergrundsdefekten. ( B ) Den sorte kurve viser den alternerende temperaturgraf opnået ved at trække polynomisk pasform fra temperaturdataene på panelet (a). Den blå kurve blev opnået ved at anvende Hilbert-transformation til den sorte kurve og middelværdi. ( C ) Repræsentative eksperimentelle data på samme side over et interval på -7 mm til 3 mm ved en hastighed på 0,1 mm / s. Frekvensen er halveret, men forlængelsen svarer til panelet (a). ( D ) Suboptimale eksperimentelle data, der blev erhvervet, når undergrundsdefekten var i en dybde på 1 mm. Klik her for at se en større version af denne figur.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Den præsenterede protokol beskriver hvordan man lokaliserer kunstige undergrundsdefekter orienteret vinkelret på overfladen. Hovedformålet med metoden er at skabe interfererende termiske bølgefelter, der interagerer med undergrundsdefekten. De vigtigste trin er (i) at kombinere en SLM med en diodelaser for at skabe to alternerende høj effektbelysningsmønstre på prøveoverfladen; Disse mønstre omdannes fototermisk til kohærente termiske bølgefelter, (ii) at lade dem ødelægge destruktivt, mens de interagerer med en undergrundsdefekt, og (iii) at lokalisere disse defekter fra en overfladeskanning af prøveoverfladens dynamiske temperatur ved hjælp af en termisk billeddannelse IR kamera. Da kun den relative oscillation af temperaturen omkring en langsomt varierende middelværdi og ikke den absolutte temperaturværdi er nødvendig, er denne fremgangsmåde yderst følsom overfor skjulte defekter 1 .
Et af de mest kritiske trinInden for protokollen er at etablere tilstrækkelig homogenitet af belysningsstråleprofilen, når der anvendes en SLM-koblet laserkilde til struktureret opvarmning (se trin 1.10). Diode laseren giver en høj bestråling, men skal føres ind i projektoren indeholdende SLM med den korrekte strålediameter og retningsstyrke. På grund af mindre uundgåelige geometriske og spektrale fejlparametre med den proprietære optiske sti inden for projektoren forvrides det genererede billede på prøven. Derfor udføres en numerisk korrektion af billedintensitetsværdierne, der styrer det projicerede billede, med en referencestråleprofilmåling. Et andet kritisk trin for et vellykket eksperiment er at opnå en høj rumlig opløsning af IR-billedet (se trin 3.3.7-3.3.8). Udtømningszonen skal være tilstrækkeligt rumligt opløst, ellers ingen udtømning, og derfor kan ingen defektposition måles.
De anvendte termiske bølges karakter er en diffusionsagtigProces, der fører til en stærk dæmpning af deres amplitude over nogle få millimeter. Vi opfylder denne fysiske begrænsning ved at bruge en høj-effektdiode laser som lyskilde. Flaskehalsen i den nuværende eksperimentelle opsætning er SLM 21 's termiske spændingsgrænse, hvilket betyder, at kun en brøkdel af den tilgængelige laserkraft kan anvendes. Vores nuværende løsning er at belægge prøveoverfladen med en sort grafitbelægning. I fremtiden forventer vi opsætninger med højere følsomhed ved hjælp af optimerede lysmotorer eller endda omskiftelige direkte laserarrayer, såsom højtydende vertikale hulrumsoverfladeemitterende laser (VCSEL) arrays 22 .
Den væsentligste forskel mellem denne metode og den eksisterende termiske billeddannelse ved ikke-destruktiv testning er, at vi bruger den destruktive interferens af fuldt sammenhængende termiske bølgefelter; Hvilket kun er muligt efter at have kontrol over amplitude og fase af et sæt individuel liKilder på en deterministisk måde. Inden for de eksisterende termografiske metoder anvendes enten en plan lyskilde styret i tidsdomænet eller et enkelt fokuseret laserpunkt, der styres i det rumlige domæne. Den største fordel ved vores tilgang er høj følsomhed over for defekter liggende vinkelret på prøveoverfladen.
Hidtil er der kun skabt to individuelle lyskilder. Med den laserkoblede SLM kan vi i princippet generere og styre op til en million individuelle lyskilder - en million varmekilder - på prøveoverfladen. Det er klart, at denne tilgang åbner mulighederne for vilkårlig termisk bølgeformgivning på lang sigt og overfører teknikker fra ultralyd eller radar til aktivitetstermografien inden for fysiske grænser. Når udstødningsudfordringen som angivet ovenfor ( dvs. optisk effekt pr. Projiceret pixel) er tilfredsstillende løst, skal endnu mindre defekter placeret dybere under overfladen blive detekterbare. Indtil nu,Stål er blevet testet, men metoden er meget lovende især for plast, sammensatte materialer og andre følsomme materialer på grund af den lave termiske belastning påført.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Forfatterne har intet at afsløre.
Acknowledgments
Vi vil gerne takke Taarna Studemund og Hagen Wendler for at tage fotografier af den eksperimentelle opsætning samt at forberede dem til figurudgivelse. Desuden vil vi gerne takke Anne Hildebrandt for prøveudarbejdelsen og Sreedhar Unnikrishnakurup, Alexander Battig og Felix Fritzsche til korrekturlæsning.
Materials
| Name | Company | Catalog Number | Comments |
| 500 W diode laser system, 940 nm | Laserline | LDM 500 - 20 | Pilot laser class 2 @ 650 nm, diode laser is a class 4 laser system --> special laboratory needed |
| Laser control box | Laserline | Laser control box LDM | Add on to the laser system, used to switch electronically, laser threshold, shutter, laser on 0 V..5 V TTL |
| Control box scanner | Laserline | Add on to the laser system, used to adjust the optical output power via analog signal from 0 V..10 V | |
| Fiber Laser Mount 2", f = 80 mm | Laserline | Add on to the laser system | |
| Multifunction Data Aquisition (DAQ) Device + BNC Terminal | National Instruments | NI-USB 6251 | The DAQ card is used to trigger the IR camera, the DLP Light Commander 5500, control Laser and diode PDA 36A |
| Standard - PC | Control PC - graphic card for two screens, at least 4 x USB, Windows based | ||
| BNC cabel | Standard cable | ||
| HDMI cable | Standard cable | ||
| Micro USB to USB cable | Standard cable | ||
| LabVIEW 2013 SP1 Development System | National Instruments | Development environment for device control | |
| LPPT control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT intensity software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT laser control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| Matlab 2016b | MathWorks | Postprocessing of the measurement data | |
| LPPT postprocessing software | BAM | Postprocessing of the measurement data | |
| IR camera control PC | InfraTec | Control PC is supplied by camera distributor | |
| IR camera control software | InfraTec | Irbis 3 Professional | |
| InfraTec SDK | InfraTec | Dynamic Link Library as interface between the native data aquisition format of Infratec and Matlab | |
| IR camera | InfraTec | Image IR 8300 | 640 x 512, cooled InSb detector, wavelength 2 µm..5.7 µm, noise = 20 mK + accessories (LAN cable, Digital in/out cable, space ring, power supply, case) |
| Tripod | Manfrotto | 161MK2B | |
| IR camera mount | Manfrotto | 405 | |
| Projector development kit (PDK) for digital light processing (DLP) technology (DLP Light Commander 5500) | Logic PD | DLP-LC-DLP5500-10R | DLP5500 Digital Micromirror Device from Texas Instruments included , light engine and case need to be disassembed |
| PDK control software | Logic PD | Included when delivered, DLP Light Commander control software | |
| Mechanical platform for the PDK | BAM | Self made (140 x 230 x 420) mm3 | |
| Power meter control unit | Ophir | Vega | USB Interface |
| 30 W power meter head | Ophir | 30(150)A-LP1-18 | Power meter head to determine Transmission of the projector system |
| 500 W power meter head | Ophir | FL500A | Power meter for process supervision |
| Motion controller | Newport | ESP301 | with USB Interface |
| Translation stage | Newport | M-ILS200CC | Connected to ESP301 |
| Photodiode with amplifier | Thorlabs | PDA 36A-EC | 1" mount |
| Reflective filter ND1 | Thorlabs | ND10A | to be mounted to the PDA 36A |
| Pinhole 1" | Thorlabs | P1000S | to be mounted to the PDA 36A |
| Optical aluminium breadboard | Thorlabs | MB60120/M | (1,200 mm x 900 mm) base |
| Plano Convex Lens f = 200 mm | Thorlabs | LA1979-B | Coated for IR, first telescope lens |
| Plano Convex Lens f = 75 mm | Thorlabs | LA1145-B | Coated for IR, second telescope lens |
| xy-translation stage | Newport | M401 | Used for adjusting the telecope |
| Beamsampler | Thorlabs | BSF20-B | Splits the optical output, used to reduce the optical input for the projector system |
| Mirror | Thorlabs | BB2-E03 | Mirror for coupling the beam to the DLP Light Commander |
| Heavy duty lab jack | Thorlabs | L490 | Used for the fiber mount and on top of the linear stage to position the sample (2x) |
| PDK-objective | Nikon | Nikon AF Nikkor 50 mm 1:1:8:D | Objective for DLP Light Commander, 50 mm |
| Plano Convex Lens f = 100 mm | Thorlabs | LA1050 -B | Lens is attached to the Nikon Objective |
| Bi-Convex Lens f = 60 mm | Thorlabs | LB1723 -B | Lens to be attached to the Nikon objective in order to determine the optical transmission with the 30 W measurement head |
| Square protected gold mirror | Thorlabs | PFSQ20-03-M01 | |
| High power IR sensor card | Newport | F-IRC-HP-M | Sensor card to check the optical pathway |
| 2" crosshairs | BAM | Self-made | |
| 1" crosshairs | BAM | Self-made | |
| Bullseye level | Thorlabs | LCL01 | |
| Translation Stage | Newport | M-UMR8.25 | Used for measuring the beam profile |
| Micrometer screw | Newport | DM17-25 | Used with translation stage M-UMR8.25 |
| Mounted Zero Aperture Iris | Thorlabs | ID75Z/M | used to check the optical pathway |
| Bases and Post Holders Essentials Kit, Metric and Universal Components | Thorlabs | ESK01/M | Basis |
| Posts & Accessories Essentials Kit, Metric and Universal Components | Thorlabs | ESK03/M | |
| M6 Cap Screw and Hardware Kit | Thorlabs | HW-KIT2/M | |
| Construction Rails | Thorlabs | XE25L700/M | |
| 1" Construction Cube | Thorlabs | RM1G | Used to mount construction rails |
| Electrical discharge machining | Sodick | AG60L | www.sodick.de |
| St37 block of steel (100 x 100 x 40) mm3 |
BAM | self-made, hidden defect with remaining wall thicknesses of 0.25 mm, 0.5 mm, 0.70 mm, 1.25 mm (shown in Figure 5) | |
| St37 block of steel (100 x 100 x 40) mm |
BAM | self-made, hidden defect with remaining wall thicknesses of 1 mm, 1.5 mm, 1.75 mm, 2 mm (shown in Figure 5) | |
| Graphite spray | CRC Industries Europe NV | GRAPHIT 33 | Ref. 20760, 200 mL aerosol (Kontakt-Chemie) |
| Protective tape | Tesa | tesakrepp 4348 | used to protect the hidden defects while coating |
References
- Thiel, E., Kreutzbruck, M., Ziegler, M. Laser-projected photothermal thermography using thermal wave field interference for subsurface defect characterization. Appl. Phys. Lett. 109 (12), 123504 (2016).
- Ibarra-Castanedo, C., Tarpani, J. R., Maldague, X. P. V. Nondestructive testing with thermography. Eur. J. Phys. 34 (6), 91-109 (2013).
- Maldague, X. P. Introduction to NDT by active infrared thermography. Mater. Eval. 60 (9), 1060-1073 (2002).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning pulsed laser spot thermography. Ndt&E Int. 44 (2), 216-225 (2011).
- Lugin, S. Detection of hidden defects by lateral thermal flows. Ndt&E Int. 56, 48-55 (2013).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning laser-line thermography and laser-spot thermography. Meas. Sci. Technol. 22 (3), (2011).
- Pech-May, N. W., Oleaga, A., Mendioroz, A., Salazar, A. Fast Characterization of the Width of Vertical Cracks Using Pulsed Laser Spot Infrared Thermography. Journal of Nondestructive Evaluation. 35 (2), 22 (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. SPIE 9761. Douglass, M. R., King, P. S., Lee, B. L. , Spie-Int Soc Optical Engineering. (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. WCNDT 2016. , 6 (2016).
- Mandelis, A. Diffusion-Wave Fields: mathematical methods and Green functions. , Springer-Verlag. (2001).
- Almond, D., Patel, P. Photothermal Science and Techniques. 10, Chapman & Hall. (1996).
- Salazar, A. Energy propagation of thermal waves. Eur. J. Phys. 27 (6), 1349-1355 (2006).
- Bennett, C. A., Patty, R. R. Thermal wave interferometry: a potential application of the photoacoustic effect. Appl. Opt. 21 (1), 49-54 (1982).
- Busse, G. Stereoscopic depth analysis by thermal wave transmission for nondestructive evaluation. Appl. Phys. Lett. 42 (4), 366 (1983).
- Holtmann, N., Artzt, K., Gleiter, A., Strunk, H. P., Busse, G. Iterative improvement of Lockin-thermography results by temporal and spatial adaption of optical excitation. Qirt J. 9 (2), 167-176 (2012).
- Pribe, J. D., Thandu, S. C., Yin, Z., Kinzel, E. C. Toward DMD illuminated spatial-temporal modulated thermography. Proc. SPIE 9861. , (2016).
- Ravichandran, A. Spatial and temporal modulation of heat source using light modulator for advanced thermography. , Missouri University of Science and Technology. (2015).
- DLP 0.55 XGA Series 450 DMD. , TexasInstruments. (2015).
- Application Note - DLP System Optics. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?baseLiteratureNumber=dlpa022&keyMatch=dlpa022&tisearch=Search-EN-Everything (2010).
- DLP LightCommander Control Software - User Manual. , LogicPD. Available from: https://support.logicpd.com/ProductDownloads/LegacyProducts/DLPLightCommander.aspx?_sw_csrfToken=318b0448 (2011).
- White Paper - Laser Power Handling for DMDs. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?literatureNumber=dlpa027&fileType=pdf (2012).
- Moench, H., et al. High-power VCSEL systems and applications. Proc. SPIE 9348. , (2015).
