

Abstract
摩擦和磨损是不利的工程系统。当两个滑动表面之间的界面被振动在高于声范围(20千赫)的频率的超声波的润滑得以实现。作为一个固态技术,超声波润滑可以用在常规的润滑剂是不可行或不希望的。此外,超声波润滑允许两个滑动表面之间的有效摩擦系数的电调制。此属性可允许修改其摩擦状态和相关的动态响应的经营条件的变化自适应系统。面磨损,也可以通过超声波润滑降低。我们开发的协议,调查减少摩擦力的依赖,并减少磨损对超声波润滑表面之间的线性滑动速度。的销 - 盘摩擦计建其不同于商业单位中的压电堆用于振动该销22在千赫垂直于旋转盘的表面。摩擦和磨损指标,包括有效摩擦力,体积损失,和表面粗糙度测量不具有和具有超声波振动以1至4兆帕和三种不同的滑动速度恒定的压力:20.3,40.6,和87毫米/秒。光学轮廓被利用到耐磨表面表征。有效摩擦力是由62%的在20.3毫米/秒减小。始终与现有理论的超声波润滑,在摩擦力减小%的减少而增加的速度,下降到减少29%的摩擦力在87毫米/秒。磨损减少基本保持恒定(49%),在考虑的三个速度。
Introduction
摩擦存在于两个接触表面的界面,当他们滑动或相对于彼此滚动。摩擦通常发生随着磨料或粘附磨损。1超声波的背后是高频现象的科学,也就是说,波行进以上频率的声范围(20千赫)。超声波的领域包括两种根本不同的制度。一种机制包括象在成像过程使用,例如医疗超声或结构的非破坏性检查低强度波。另一种是,其中高能量波被用于执行或帮助工程过程,如塑料和金属焊接的高功率制度。它已被证明在两个表面的界面,后一种超声波振动的应用在滑动接触减少有效摩擦力在界面处。这种现象被称为超声润滑。
实现两个滑动对象之间的超声波的润滑,以超声波频率相对振动,必须在它们之间建立。振动通常施加到两个对象中的一个,无论是在纵向,横向,或垂直的方向相对于滑动速度。在这项研究中,一个摩擦计的销装配有压电致动器,使得其尖端垂直振动的方向与摩擦计的旋转盘。压电材料是一类“智能”的材料变形时,接触到的电场,振动在相同的频率作为激励场。压电材料可在频率以及振动到MHz范围内。被叠加到宏观速度,超声振动具有交替的瞬时摩擦力的方向与所述表面之间的接触,这在组合导致减少的有效摩擦力和表面磨损的效果。 超声波摩擦减少已被证明在实用的制造系统。例如,此技术已被用于降低刀具和工件在金属加工和成形,例如钻孔,冲压,轧制片,和拉丝过程之间的力。好处包括改善表面光洁度2和昂贵的和有害环境的洗涤剂减少需要从最终产物中除去润滑剂。有在其他区域的超声波润滑潜在应用程序。例如,超声波润滑可通过省去了润滑剂或涂层基本上提高个人保健品的用户体验。在汽车应用中,摩擦调制可以提高球窝接头的性能,而车辆座椅和轨之间的摩擦减少有助于座椅移动,节省空间和质量,否则将通过传统的组件和mechani被占用短信。超声波的润滑也有助于提高燃料效率通过减少摩擦在动力总成和悬挂系统。3在空间应用中,传统的润滑剂不能使用,超声波润滑可以用于减少磨损,显着延长的关键部件的寿命。
通过超声波润滑减摩实验室演示多不胜数。摩擦减少被量化为没有超声波润滑和施加超声振动的摩擦力测量的摩擦力之间的差别。在两种情况下,摩擦力直接测量与力传感器。利特曼等人4-5连接的压电驱动致动器到一个滑动件,在其上的力传感器和一帧被安装用于测量摩擦力和施加正常负载。气动致动器被用来将滑动件一起沿导轨致动器推动。 UltrasoniÇ振动进行的方向上施加纵向的滑动速度。巴拉德瓦和Dapino 6-7进行使用连接到一个锥形波导在堆叠的任一端的压电致动器叠层类似的实验。触点锥体的球形边缘和导轨的表面之间发生了。系统参数,例如接触刚度,正常负载,和整体刚度的影响进行了研究。 Kumar和哈钦斯8安装在其通过超声换能器激励的超声波发生器的销。分别产生并传送到销,将其放置成与工具钢表面接触的超声波振动。法向力是由一个气压缸施加和由测力传感器测得。销和盘之间的相对运动是由一个往复表创建。
Pohlman和Lehfeldt 9还实施了销-盘试验。不像其他的研究中,他们使用了一个magnetostrict香港专业教育学院换能器产生超声波振动。为了研究最佳方向超声波减小摩擦,换能器小心地对准,使得所述振动方向为纵向,横向,并垂直于宏观速度。他们研究了干燥和润滑表面超声波减少摩擦。波波夫等人10利用带锥形波导的致动器。致动器被放置在与旋转底板接触。取得九材料的各种硬度锥被采纳,研究材料的硬度对超声波摩擦减小的影响。洞和Dapino 11月13日使用的压电换能器以产生并传送超声波振动的棱柱波导具有圆边。纵向振动引起的垂直振动,由于泊松效应。采用了弧形顶部的滑盖划归在接触波导。一个框架的建立是为了应用法向力在接触界面。 Ť他滑块被手动拉动围绕波导的中心区域;摩擦力是通过被连接到所述滑动件的负载传感器测量的。
超声波诱导降低磨损进行了研究和论证。容积损失,体重减轻,以及表面粗糙度的改变被用来量化wear.Chowdhury的严重程度和Helali 14中的销-盘设置振动的旋转盘。由位于旋转盘下两个平行的板的支撑结构中产生的振动。顶板具有球形球安装偏离中心在底表面上,滑动在被刻在底板的上表面,一个槽。槽被加工具有周期性可变深度,使得顶板旋转期间上下移动。频率按照旋转速度大约100赫兹不等。
科比和约克15-16研究对W微振动的影响耳下降。它们通过一个保持器插入一个碳圆筒一端休息纺丝钢盘,并连接到一个线圈弹簧的另一端上。在一种情况下,该圆筒紧贴装配在支架中,使有振动没有空间。在另一些情况下,间隙被留,以允许微振动气缸而气缸是在与纺丝盘接触。重量损失气缸测定来计算磨损率。结果表明,在自生的微振动得益于高达50%的减少磨损。
后藤和芦田17-18还通过销-盘试验。它们经由一锥形锥和一个喇叭连接销样品的换能器。销垂直于盘表面振动的方向。一团是连接到换能器在其顶部施加正常负载。摩擦力从被施加到转动盘上的扭矩被翻译。磨损被认定为粘接剂,因为这两个碳钢针和盘发了言。磨损率计算从量损耗测量。
它已经显示,线性速度起着超声波润滑中起重要作用。这项研究的实验部分侧重于摩擦和磨损减少对线速度的依赖性。
Subscription Required. Please recommend JoVE to your librarian.
Protocol
1.开发改性摩擦磨损试验机
- 安装卡盘电机子系统。
- 等级隔振表。放置在桌子上的直流电动机;平电机垫片,并用struts和螺栓固定。将电机周围支撑架。
- 花键轴连接到使用密钥电机轴。把支承板与花键轴经历在板孔中的框架上。集推力针滚子轴承在支撑板和周围的花键轴。润滑轴承,切削液。
- 通过适配器板,其具有在一侧具有花键轴连接,而在另一侧的卡盘的螺栓图案连接花键轴到卡盘。在这一点上,卡盘支持通过推力轴承的帧并且连接到通过适配器板的马达。
- 安装gymbal组装。
- 构建使用U型支柱,支架支撑框架,和螺栓。使用四长支柱的支柱,并使用三个短的如横梁。
- 使用固定支架和螺钉的四大支柱,以隔振表。该gymbal组装连接用螺栓和螺母中间横梁。
- 安装在gymbal装配一个水平取向的负载传感器;刚性地连接的负载传感器的gymbal组件的框架的一侧,而另一侧连接到gymbal臂用钢丝。
- 组装压电促动器。
- 插入3在长,通过在压电叠层的孔全螺纹杆;放一个垫圈和一个螺母在堆栈的每一端;留下约1/8的线程一个螺母的端部突出的。
- 拧紧螺母两端用来在堆叠的预压。使用连接螺母和垫圈长,外露螺纹的gymbal手臂。螺纹橡子螺母上,在卡盘压电致动器和插入盘的另一端(本橡子螺母和光盘用于建立的目的,不用于测试)。
- 调整gymbal组件的高度,使橡子螺母是在与盘的顶部接触和gymbal臂处于水平状态。
- 调整gymbal组件的位置,以使橡子螺母和圆盘之间的接触点为约25毫米远离光盘的旋转中心。拧紧所有螺栓的设置,以确保稳定。
- 设置信号产生,信号放大,和数据采集子系统。
- 数据采集系统连接到一个实验室计算机。信号发生器的输出连接到电源放大器的输入。连接放大器的输出与压电堆的输入线。放大器显示器连接到所述数据采集系统。
- 测力传感器连接到信号调节器,然后将信号调节器的输出端连接到数据采集系统。
- 其他的设置。
- 连接空气软管铺空气。固定软管到框架的端部,使得在所述压电致动器的出口点。胶带热电偶的尖端向压电致动器。连接热电偶导线读者;挂读者在框架上。
2.预试验前的准备
- 校准马达的旋转速度。
- 连接磁铁到卡盘的边缘。代替霍尔效应探头靠近卡盘。连接霍尔效应探头的输出,以高斯计,其连接到数据采集系统。
- 打开数据采集软件,并开始数据采集。转动电机上;转动电机控制器的速度旋钮10(最低转速的马达提供)。之后,电机转动10圈,关闭电机。结束数据采集。
- 分析所保存的数据;从高斯计的输出信号的两个峰值之间的时间是时间为电机腐烂吃了一整圈。
- 转动旋钮从10到100(最高转速的马达提供)以10为增量;重复步骤2.1.2至2.1.3。
- 放置负荷传感器垫橡子螺母和盘之间以测量在界面上的法向力。精细机使用车床测试盘的表面上。
- 清洁橡子螺母和光盘进行测试之前,立即进行测试。
- 戴上塑料手套,面对mask.Prepare个实验室湿巾;它们折叠成1平方英寸。喷在组织广场乙醇;轻轻擦拭橡子螺母和光盘与他们的表面。
- 安装干净的橡子螺母和光盘。
- 螺纹橡子螺母到压电致动器,具有开口扳手拧紧。插入在卡盘盘;调整位置,以确保橡子螺母的前端与所述磁盘表面接触。
- 对准盘和gymbal臂的顶表面上。拧紧卡盘等等该盘被牢固地保持。
- 测量盘旋转的跳动。
- 在夹具安装激光位移传感器,并放置旁边的摩擦计夹具。调整传感器的高度和角度,使该盘是在传感器的范围内,并且所述激光束是垂直于盘。
- 传感器的输出连接到数据采集系统。启动数据采集。打开电机和旋转盘10圈;关闭电机。结束数据采集。
3.执行测试
- 试验的超声波振动。
- 杭2 N重上一个钩连接到gymbal臂通过电线和两个滑轮。重量被用于应用橡子螺母和盘之间的正常负载。
- 挂起另一2N的重量上,连接到gymbal臂,以提供一个水平预紧称重传感器的其它钩。
- 设置信号发电机以提供连续的正弦信号的DC的3伏偏置,的3伏幅度,和22千赫(压电致动器的谐振频率)的频率。需要注意的是3伏偏置被用来防止张力在压电致动器。
- 开始数据采集(减少摩擦力)。打开放大器并转动增益旋钮15,其对应于4.67的实际增益(该增益旋钮数字是任意的)。
- 转动电机上;设定的旋转速度,以6.67的转速,以提供20.3毫米/秒的线速度。运行测试4小时。
- 关闭电机和驱动器,然后停止数据采集。取出测试橡子螺母和光盘从设置向上;重复步骤2.3至2.5,安装新的橡子螺母和光盘。
- 重复步骤3.1.1至3.1.6。在步骤3.1.5,设置转速13.3转速和28.7的转速,以提供40.6毫米/秒,87毫米/秒,分别线速度;运行测试2和0.94小时correspondingly。
- 测试没有超声波振动。
- 重复步骤3.1.6改变橡子坚果和光盘。重复步骤3.1.1至3.1.6与信号发生器和信号放大器关闭(测得的摩擦是内在的摩擦)。
4.光学轮廓测量
- 测量准备
- 立即用2.3步测量前清洗光盘。使周围的盘的轮缘8均匀分布的标记。打开轮廓软件。
- 提高透镜,以便有透镜和样品平台之间有足够的间隙。级的样品平台。将一块实验室擦拭平台上。
- 轻轻地放在试样上朝向轮廓的前八个标记之一的组织的顶部。
- 测量设置。
- 选择VSI(立式扫描干涉)为处理类型。选择5X镜头大视场和整体造型。通过2.4毫米挑0.55X倍率为1.8毫米的扫描区域。
- 选择1X扫描速度。设定扫描范围为-100米到100米。向下把镜头对着样品,直到在屏幕上的图像模糊。调整透镜的高度,直到该图像清晰。
- 选择2作为扫描的数量来平均每个测量。点击测量按钮。
- 后测量程序。
- 使用软件中的纠正原始图像为整个样本的倾斜所定义的视觉配方。打开分析工具箱中的软件。
- 从“基本统计”项目获得测量粗糙度值。从“卷”项得到的扫描区域内的磨损伤痕的测量体积损失。
- 减的1D轮廓的图像在x和y方向的二维轮廓,所述三维轮廓,以及粗糙度值表。顺时针旋转样品,直到第Ë下一个标记所面临的轮廓的前面。
- 重复步骤4.2至4.3的其余7痕迹。
- 重复步骤4.1。 4.4对所有六个光盘。
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
这里提出的代表性的测量是从图 1中所示的改进摩擦计获得的。所述压电致动器产生振动与为2.5μm振幅在22千赫的频率。来研究摩擦的依赖性和磨损减少的线速度,三种不同的速度(20.3,40.6,和87毫米/秒)通过改变电动机的旋转速度被施加到盘。对所有三个组,盘片的转数和销的行进距离被选为1600和292.5米分别。标称旋转直径为50毫米。其他参数,诸如法向力,振动频率和振动振幅保持相同的所有测试( 表1)。
摩擦力进行取样,在400赫兹利用2秒采样窗口的频率。 图2示出了典型的数据从单个采样窗口。观察到的fluctuatioN的摩擦力归因于粘滑。分别计算的摩擦力的平均值和作图在图3中针的旅行距离。内在摩擦力由在图中的点表示,而摩擦力与超声波振动,只显示“×”标记。绿色,蓝色和红色分别用于测试数据在20.3毫米/秒40.6毫米/秒,87毫米/秒。从每个试验摩擦力几乎保持恒定一次稳态操作得以实现。
盘跳动使从销和gymbal组件的垂直运动,这导致的正常力变化惯性加速度。其结果是,所测量的摩擦力波动,如图3。需要强调的是 ,在图2中观察到的波动是由于粘滑。考虑到系统后的摩擦力的平均值已经达到稳定状态操作中, 图图3示出,该摩擦力是更高以更高线速度,超声波振动是否被施加到系统。这一结果与先前的研究显示,力-速度曲线具有正斜率为低的线性速度19-21一致。
摩擦减少的百分比被定义为
1。 
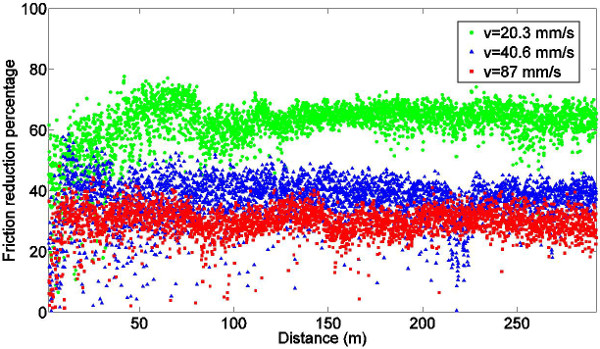
其中是内在摩擦力(力而不超声波振动,在步骤3.2测量),是通过超声波的振动(在步骤3.1.4测定)的摩擦力。在每个线速度减少的百分比作图由销在图4中移动的距离。超声波振动降低的稳态摩擦力为所有三种测试的线速度,然而,这个比例随着线速度增加。
测得的稳态摩擦力,稳定化的距离,并且摩擦减少率列于表2。超声波振动促进打破氧化物层和形成所述销和盘,这导致更短的距离的摩擦力达到稳定之间稳定的接触的过程中当超声波振动状态存在。
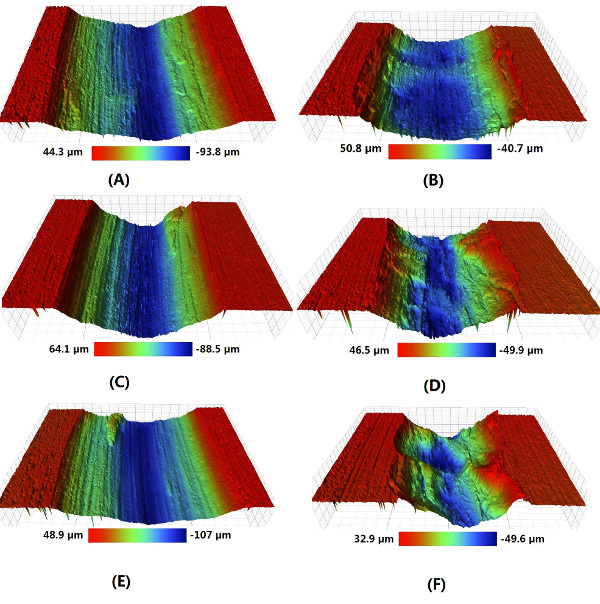
磨损发生材料具有不同的硬度的表面上之间。22由于在不锈钢硬度的差(700〜950公斤/毫米2)和铝(45至50公斤/毫米2),磨损被标识为磨料在这项研究中。在盘片上穿槽如图 5所示的图像的A,C,E对应于与超声波振动测试,而图像B,D,F是不振动的数据。由此可以看出,槽显得更不均匀并且当施加超声波振动的非反射性的。
三维profiles,表面粗糙度值,和槽的体积损失从光度仪扫描得到的。凹槽通过超声波的振动的3-D剖面( 图6中B,D,F)的出现窄,欠光滑,以及比那些浅无振动(图6 的A,C,E),这表明,超声波振动引起的磨损减少。
量化的磨损减少的程度,磨损率定义为
2。 
其中以mm 3盘体积损失(在步骤4.3.2测量),是通过销以米(表1)行进的距离。类似于摩擦减少率时,磨损减少的百分比被定义为
3。 
其中是内在磨损率(未经超声振动),并且是磨损率与超声波振动应用。表3的数据表明,磨损率和表面粗糙度参数时,超声振动的存在,这是减少磨损的指标较小。在降低磨损率几乎保持恒定的速度增加。





内页=“总是”> 
图1实验装置:(A)整体的摩擦磨损试验机;(二)机动车;(三)支持框架;(四)具体gymbal总成;(E)压电致动器; 和(F)系统原理图。 (这个数字已经被修改13。)

从一个采样窗口图2.典型的数据。(这个数字已经被修改13。) 点击此处查看该图的放大版本。
931fig3.jpg“/>
图3.摩擦力有和没有超声波振动以不同的速度。(这个数字已经被修改13) 点击此处查看该图的放大版本。

由公式计算出的图4.测得的摩擦减少。 (1),(这个数字已经被修改13)请点击这里看到这个图的放大版本。

超声波vibr获得图5.磨损沟。不一致(A,C和E)和未经超声波振动(B,D和F)的每列对应于一个线性速度:20.3毫米/秒(A,B); 40.6毫米/秒(C,D);和87毫米/秒(E,F)。 (这个数字已经被修改13)

。没有超声波振动(A,C和E)得到的磨损沟和通过超声波的振动(B,D和F)的每一行代表一个线速图6. 3D轮廓 20.3毫米/秒(A,B); 40.6毫米/秒(C,D);和87毫米/秒(E,F)。 (这个数字已经被修改13)请点击这里看到这个图的放大版本。
| 参数 | 值 | ||
| 团 | 1 | 2 | 3 |
| 线速度(毫米/秒) | 20.3 | 40.6 | 87 |
| 运行时间(小时) | 4 | 2 | 0.93 |
| 距离由脚走过(M) | 292.5 | ||
| 革命 | 1600 | ||
| 引脚材料 | 不锈钢316 | ||
| 光盘材料 | 铝2024 | ||
| 标称法向力(N) | 3 | ||
| 光盘用完(毫米) | 0.0286 | ||
| 美国频率(KHz) | 22 | ||
| 美国振幅(微米) | 2.5 | ||
| 标称槽直径(mm) 50 | |||
| 额定温度(℃) | 21±1 | ||
| 标称致动器的温度(℃) | 31±1 | ||
| 环境 | 实验室空气 | ||
| 采样频率(Hz) | 400 | ||
表1中的参数摩擦计试验使用(该表已经被修改13)
| 线速度(毫米/秒) | 美国 | 稳态摩擦(N) | 距离达到稳定状态(M) | 摩擦减少(%) |
| 20.3 | 否 | 1.024±0.063 | 4.17 | 62.22 |
| 对 | 0.379±0.041 | 2.78 | ||
| 40.6 | 否 | 1.201±0.055 | 11.61 | 36.11 |
| 对 | 0.748±0.035 | 7.21 | ||
| 87 | 否 | 1.472±0.064 | 8.94 | 29.32 |
| 对 | 1.041±0.056 | 4.64 |
表2.稳态摩擦力,距离为了达到稳定状态,并减少摩擦。(该表已被修改,从13)
| 线速度(毫米/秒) | 美国 | R A(微米) | R Q(微米) | - [R T(微米) | 磨损率(毫米3 / M) | 触点数量 | |
| 20.3 | 否 | 18.829 | 21.421 | 124.35 | 2.237×10 -2 | 45.76 | |
| 对 | 17.238 | 18.975 | 87.011 | 1.214×10 -2 | 3.17×10 8 | ||
| 40.6 | 否 | 21.647 | 22.673 | 109.28 | 2.581×10 -2 | 48.18 | |
| 对 | 17.289 | 19.922 | 106.42 | 1.338×10 -2 | 1.58×10 8 | ||
| 87 | 否 | 19.825 | 21.921 | 130.52 | 2.43×10 -2 | 48.63 | |
| 对 | 17.606 | 111.25 | 1.248×10 -2 | 7.39×10 8 |
表3的磨损率,接触的数目,和表面粗糙度参数的比较(算术平均;均方根;轮廓最大高度)(此表已经被修改13)。
Subscription Required. Please recommend JoVE to your librarian.
Discussion
实验使用该协议来研究线性速度对超声波摩擦和磨损减少的效果进行。的测量结果表明,超声波振动有效地减少摩擦和磨损,在三个线性速度。符合现有的观察,摩擦减小的量从62.2%在20.3毫米/秒减小到29.3%,在87毫米/秒。磨损减少是微不足道的不断变化的线速度(45.8%至48.6%)。
材料特性如杨氏模量和屈服强度可能当超声波穿过材料发射发生变化。这通常被称为超声软化23。在这项研究中,由于在压电致动器和的设定上其它部件之间的刚度差,由致动器产生的22千赫的振动没有传递到的实验装置的另一部分,尽管所振动模式结构大约100赫兹很兴奋,当超声波VIB口粮被应用。在销和盘之间的界面,超声波振动引起的发热,这将导致温度上升的接口。然而,基于由董和Dapino进行的实验中,温度上升的范围内,导致可忽略的改变材料性质。
该实验中的一个限制是,没有机制来消除光盘的摆动,这可能会导致所述销的垂直运动,gymbal臂和重量。在实际的正常力变化的移动质量的结果的加速度施加在界面处,因此摩擦力测量。因此,关键是要保证电机轴,花键轴,卡盘,和光盘是水平。实验可变性时摆动的量最小化减少。
同样重要的是,以牢固地拧紧螺母橡子到压电致动器,使得橡子螺母不会在测试过程中变松。超声波振动是无效的,以减小摩擦力,如果振动不被发送到接口。如果摩擦力突然跳转到一个更高的水平在测试过程中,这是因为橡子螺母和执行器之间的连接松动的可能性非常大。这个问题是伴随着蜂鸣声,因此它可以容易地检测。
的电动压电致动器产生的热量能够迅速增加其温度,如果没有冷却采用。重要的是要调整空气流到适当的水平以除去热量,并保持致动器的温度恒定。即使当压电致动器被关闭了测试,没有超声波振动中,相同的空气流仍然应该施加使试验条件保持相同的所有测试。
相比于现有的工作,这个协议的研究摩擦和磨损同时,在相同的测试,这是没有系统先前完成的。该gymbal组件使得一个更直接的方法来测量摩擦力在比它或者从测量致动力或从其他物理参数,例如变形或扭矩推导摩擦其它方法的接口。该盘片保持器设计和制造这些测试允许测试样品与各种尺寸,材料,和表面粗糙度方便变化。该光学轮廓提供诸如三维轮廓和表面粗糙度来研究磨损减少,这提供了磨痕更详细的了解不是体积损失或重量损失测量。具有这些优点,该协议可以用于调查超声波摩擦的依赖性和磨损减少在许多其他的参数,如正应力,材料的硬度,表面粗糙度,和振动振幅。
Subscription Required. Please recommend JoVE to your librarian.
Acknowledgments
作者要感谢蒂姆·克兰茨来自美国宇航局格伦和杜安Detwiler本田研发的技术支持和实物捐助。由智能汽车概念中心(www.SmartVehicleCenter.org)的成员组织提供的这项研究的财政支持,国家科学基金会工业/大学合作研究中心(I / UCRC)。 SD由一个智能汽车概念研究生奖学金和大学奖学金俄亥俄州立大学研究生院的支持。
Materials
| Name | Company | Catalog Number | Comments |
| DC Motor | Minarik | SL14 | |
| Electrical amplifier | AE Techron | LVC5050 | |
| Signal conditioner | Vishay Measurements Group | 2310 | |
| Signal generator | Agilent | 33120A | |
| Piezoelectric stack | EDO corporation | EP200-62 | |
| Load cell | Transducer Techniques | MLP-50 | |
| Load sensor pad | FlexiForce | A201 | |
| Laser meter | Keyence corporation | LK-G32 | |
| Hall-effect probe and gaussmeter | Walker Scientific, Inc. | MG-4D | |
| Data acquisition module | Data Physics | Quattro | |
| Data acquisition software | Data Physics | SignalCalc Ace | |
| Thermocouple reader | Omega | HH22 | |
| Optical profilometer | Bruker | Contour GT | |
| Profilometer operation software | Bruker | Vision 64 |
References
- Bhushan, B. Introduction to tribology. , John Wiley & Sons. New York. (2002).
- Severdenko, V., Klubovich, V., Stepanenko, A. Ultrasonic rolling and drawing of metals. , Consultants Bureau. New York and London. (1972).
- Taylor, R., Coy, R. Improved fuel efficiency by lubricant design: a review. Proc. Instit. Mech. Eng., Part J: J Eng. Tribol. 214 (1), 1-15 (2000).
- Littmann, W., Storck, H., Wallaschek, J. Sliding friction in the presence of ultrasonic oscillations: superposition of longitudinal oscillations. Arch. Appl. Mech. 71 (8), 549-554 (2001).
- Littmann, W., Storck, H., Wallaschek, J. Reduction in friction using piezoelectrically excited ultrasonic vibrations. Proc. SPIE. 4331, (2001).
- Bharadwaj, S., Dapino, M. J. Friction control in automotive seat belt systems by piezoelectrically generated ultrasonic vibrations. Proc. SPIE. 7645, 7645E (2010).
- Bharadwaj, S., Dapino, M. J. Effect of load on active friction control using ultrasonic vibrations. Proc. SPIE. 7290, 7290G (2010).
- Kumar, V., Hutchings, I. Reduction of the sliding friction of metals by the application of longitudinal or transverse ultrasonic vibration. Tribol. Int. 37 (10), 833-840 (2004).
- Pohlman, R., Lehfeldt, E. Influence of ultrasonic vibration on metallic friction. Ultrasonics. 4 (4), 178-185 (1966).
- Popov, V., Starcevic, J., Filippov, A. Influence of Ultrasonic In-Plane Oscillations on Static and Sliding Friction and Intrinsic Length Scale of Dry Friction Processes. Tribol. Lett. 39 (1), 25-30 (2010).
- Dong, S., Dapino, M. J. Piezoelectrically-induced ultrasonic lubrication by way of Poisson effect. Proc. SPIE. 8343, 83430L (2012).
- Dong, S., Dapino, M. J. Elastic-plastic cube model for ultrasonic friction reduction via Poisson effect. Ultrasonics. 54 (1), 343-350 (2014).
- Dong, S., Dapino, M. J. Wear Reduction Through Piezoelectrically-Assisted Ultrasonic Lubrication. Smart. Mater. Struct. 23 (10), 104005 (2014).
- Chowdhury, M., Helali, M. The effect of frequency of vibration and humidity on the wear rate. Wear. 262 (1-2), 198-203 (2014).
- Bryant, M., Tewari, A., York, D. Effect of Micro (rocking) vibrations and surface waviness on wear and wear debris. Wear. 216 (1), 60-69 (1998).
- Bryant, M., York, D. Measurements and correlations of slider vibrations and wear. J. Tribol. 122 (1), 374-380 (2000).
- Goto, H., Ashida, M., Terauchi, Y. Effect of ultrasonic vibration on the wear characteristics of a carbon steel: analysis of the wear mechanism. Wear. 94, 13-27 (1984).
- Goto, H., Ashida, M., Terauchi, Y. Wear behaviour of a carbon steel subjected to an ultrasonic vibration effect superimposed on a static contact load. Wear. 110 (2), 169-181 (1986).
- Robinowicz, E. The friction and wear of materials. , Wiley. New Jersey. (1965).
- Bowden, F., Freitag, E. The friction of solids at very high speeds. Proc. R. Soc. A. 248 (1254), 350-367 (1985).
- Burwell, J., Rabinowicz, E.
- Cocks, M.
- Rusinko, A. Ultrasound and Irrecoverable Deformation in Metals. , LAP Lambert Academic Publishing. Saarbrücken. (2012).

{kind=link}
{kind=link}