

Abstract
Atrito e desgaste são prejudiciais para sistemas de engenharia. Lubrificação ultra-som é conseguido quando a interface entre duas superfícies de deslizamento é feito vibrar a uma frequência acima da gama acústica (20 kHz). Como uma tecnologia de estado sólido, a lubrificação de ultra-sons podem ser utilizados onde os lubrificantes convencionais são impraticáveis ou indesejável. Além disso, a lubrificação de ultra-sons permite a modulação eléctrica do coeficiente de atrito eficaz entre duas superfícies deslizantes. Esta propriedade permite que os sistemas adaptativos que modificam seu estado de atrito e resposta dinâmica associada como a mudança condições de funcionamento. Desgaste da superfície pode também ser reduzido através de lubrificação de ultra-som. Nós desenvolvemos um protocolo para investigar a dependência da redução da força de atrito e desgaste redução na velocidade de deslizamento linear entre superfícies ultra-som lubrificadas. Trib�etro pino-no-disco foi construído a partir de unidades que difere comerciais em que uma pilha piezoeléctrica é utilizado para vibrar o pino a 22kHz normal à superfície do disco rotativo. O atrito eo desgaste métricas incluindo a força efectiva de atrito, perda de volume, e a rugosidade da superfície são medidos com e sem vibrações ultra-sónicas a uma pressão constante de 1 a 4 MPa e três velocidades de deslizamento diferentes: 20.3, 40.6, e 87 mm / seg. Um perfilometria óptica é utilizada para caracterizar as superfícies de desgaste. A força de atrito eficaz é reduzida em 62% a 20,3 mm / seg. De forma consistente com as teorias existentes para lubrificação de ultra-som, a redução percentual na força de atrito diminui com o aumento da velocidade, até 29% de redução de força de atrito a 87 mm / sec. Redução do desgaste permanece essencialmente constante (49%) com as três velocidades consideradas.
Introduction
Existe atrito na interface de duas superfícies de contacto quando elas deslizam ou rolo em relação à outra. Friction geralmente ocorre junto com o desgaste abrasivo ou adesivo. 1 Ultrasonics é a ciência por trás dos fenômenos de alta freqüência, ou seja, as ondas viajando em frequências superiores a faixa acústica (20 kHz). O campo de ultra-som abrange dois regimes fundamentalmente diferentes. Um regime envolve ondas de baixa intensidade, como os utilizados em processos de imagem, como ultra-som médico ou inspeção não destrutiva de estruturas. O outro é um regime de alta energia em que as ondas de alta energia são utilizados para executar ou auxiliar processos de engenharia, tais como solda de plásticos e metais. Tem sido demonstrado que a aplicação deste último tipo de vibrações ultra-sónicas na interface das duas superfícies em contacto deslizante reduz a força de atrito na interface eficaz. Este fenômeno é conhecido como lubrificação de ultra-som.
Alcançarlubrificação de ultra-som entre dois objetos de correr, de vibração em relação a freqüências ultra-sônicas deve ser estabelecida entre eles. As vibrações são tipicamente aplicados a um dos dois objectos, quer nas direcções longitudinal, transversal, ou direcção perpendicular em relação à velocidade de deslizamento. Neste estudo, um pino de tribômetro está equipado com um actuador piezoeléctrico, de modo que a sua ponta vibra na direcção perpendicular ao disco rotativo da tribômetro. Materiais piezoelétricos são uma classe de materiais "inteligentes" que deformam quando expostos a campos elétricos, vibrando na mesma freqüência que o campo de excitação. Materiais piezoelétricos podem vibrar em frequências bem para a faixa de MHz. Sendo sobreposta à velocidade macroscópica, vibrações ultra-sónicas têm o efeito de alternando o sentido da força de atrito e instantânea do contacto entre as superfícies que, em combinação conduz a uma redução da força de atrito e de desgaste de superfície efectiva. Redução de atrito de ultra-sons tem sido demonstrada em sistemas de fabrico práticas. Por exemplo, esta tecnologia tem sido utilizada para diminuir a força entre a ferramenta ea peça de trabalho em metais e processos tais como a perfuração, prensagem, a folha de laminação, e de trefilação de arame de formação. Os benefícios incluem melhor acabamento de superfície 2 e uma menor necessidade de detergentes caros e ambientalmente prejudiciais para remover lubrificantes a partir do produto final. Há potenciais aplicações de lubrificação de ultra-sons em outras áreas também. Por exemplo, lubrificação de ultra-som pode melhorar substancialmente a experiência do usuário em produtos de cuidados de saúde pessoais, eliminando a necessidade de lubrificantes ou revestimentos. Em aplicações automotivas, a modulação atrito pode melhorar o desempenho das juntas de bola que a redução de atrito entre assentos de veículos e trilhos facilita o movimento do assento, economizando espaço e massa que poderiam ser ocupados por componentes e meca tradicionaisSMS. Lubrificação ultra-som pode também ajudar a melhorar a eficiência do combustível, reduzindo o atrito no sistema de motorização e de suspensão. 3 em aplicações espaciais, onde os lubrificantes tradicionais não podem ser utilizados, de lubrificação de ultra-sons podem ser utilizados para reduzir o desgaste e dramaticamente prolongar a vida de componentes críticos.
Demonstrações laboratoriais de redução de atrito através de lubrificação de ultra-som são numerosos. Redução de atrito é quantificada como a diferença entre a força de atrito medido sem lubrificação de ultra-sons e a força de atrito, com vibraes ultra-sicas aplicadas. Em ambos os casos, a força de atrito é medido directamente com sensores de força. Littmann et al. 4-5 ligado um atuador piezoelectricamente-driven a um slider, em que um sensor de força e um quadro foram instalados para medir forças de atrito e aplicação de cargas normais. Um actuador pneumático foi empregado para empurrar o cursor em conjunto com o actuador ao longo de um trilho de guia. Ultrasonaresvibrações c foram aplicada no sentido longitudinal para a velocidade de deslizamento. Bharadwaj Dapino 6-7 e realizou experiências semelhantes usando um actuador piezoeléctrico pilha ligada a um guia de ondas cónica em cada extremidade da pilha. Contactos entre as extremidades esféricas dos cones e a superfície do carril de guia. Foram estudados os efeitos de parâmetros do sistema, tais como contato rigidez, carga normal, e rigidez global. Kumar e Hutchings 8 instalado um pino em um sonotrode que foi energizado por um transdutor de ultra-som. Vibrações ultra-sónicas foram gerados e transmitidos para o pino, que foi colocado em contacto com uma superfície de aço da ferramenta. Força normal foi aplicada por um cilindro pneumático e medidos por uma célula de carga. O movimento relativo entre o pino e o disco foi criado por uma mesa de movimento alternativo.
Pohlman e Lehfeldt 9 também implementou um experimento pin-on-disco. Ao contrário de outros estudos, empregaram um magnetostrictive transdutor para gerar vibrações ultra-sônicas. Para estudar a direcção óptima para redução de atrito de ultra-sons, o transdutor foi cuidadosamente alinhados de modo que a direcção de vibração foi longitudinal, transversal e vertical para a velocidade macroscópica. Eles estudaram redução de atrito ultra-som em ambas as superfícies secas e lubrificadas. Popov et al. 10 utilizaram um actuador com guias de onda cônicos. O actuador foi colocado em contacto com uma placa de base rotativa. Foram adotadas cones feitos de nove materiais com diferentes durezas para estudar a influência da dureza do material em redução de atrito ultra-sônica. Dong e Dapino 11-13 utilizado um transdutor piezoeléctrico para gerar e transmitir vibrações ultra-sónicas a uma guia de onda prismático com bordos arredondados. A vibração longitudinal provoca vibração vertical devido ao efeito de Poisson. Um controle deslizante com um topo curvo foi colocado sob e em contacto guia de ondas. Um quadro foi construído para aplicar forças normais na interface de contato. Tele deslizante foi puxada manualmente em torno da área central da guia de onda; a força de atrito foi medido por uma célula de carga que foi conectado ao cursor.
Redução desgaste induzido por ultra-sons também foi investigado e demonstrado. Perda de volume, perda de peso, e a rugosidade da superfície mudanças são utilizadas para quantificar a gravidade da wear.Chowdhury e Helali 14 vibrado um disco rotativo numa configuração de pino-no-disco. As vibrações foram gerados por uma estrutura de suporte de duas placas paralelas localizadas sob o disco rotativo. A placa de topo tem uma bola esférica instalada fora do centro na superfície inferior, que desliza numa ranhura que foi gravada na superfície superior da placa de fundo. A ranhura foi maquinada com uma profundidade variável periodicamente de modo que a placa de topo move-se verticalmente durante a rotação. As freqüências variou em torno de 100 Hz de acordo com a velocidade de rotação.
Bryant e Iorque 15-16 estudaram o efeito de micro-vibrações em wredução da orelha. Eles inserido um cilindro de carbono através de um suporte com uma extremidade repousava sobre um disco de aço de fiação e a outra extremidade ligada a uma mola em espiral. Em um caso, o cilindro foi confortável montado no suporte de modo que não há espaço para vibração. Em outros casos, as folgas foram deixados para permitir que as micro-vibrações do cilindro, enquanto o cilindro foi em contacto com o disco rotativo. A perda de peso do cilindro foi medida para calcular a taxa de desgaste. Foi demonstrado que as auto-gerado micro-vibrações ajudou a reduzir o desgaste em até 50%.
Goto e Ashida 17-18 aprovou também um experimento de pin-on-disco. Eles conectado amostras pino com um transdutor através de um cone cônico e um chifre. O pino vibrado na direcção perpendicular à superfície do disco. A massa foi ligado ao transdutor na sua parte superior para a aplicação de cargas normais. Forças de fricção foram traduzidas a partir dos binários que foi aplicado para rodar o disco. Desgaste foi identificado como adesivo, porque ambospin e disco foram feitas de aço carbono. Taxas de desgaste foram calculados a partir de medições de perda de volume.
Demonstrou-se que a velocidade linear desempenha um papel importante na lubrificação de ultra-sons. O componente experimental desta pesquisa centra-se na dependência de redução de atrito e desgaste em velocidade linear.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
1. Desenvolvimento do tribômetro Modificado
- Instale subsistema chuck-motor.
- Nível mesa de isolamento de vibração. Coloque motor DC sobre a mesa; nivelar o motor com calços e corrigi-lo com suportes e parafusos. Coloque estrutura de suporte em torno do motor.
- Conecte eixo estriado ao eixo do motor usando uma chave. Colocar a placa de suporte na estrutura com o eixo estriado indo através do orifício na placa. Set empurrou rolamento de agulha-rolo na placa de apoio e em torno do eixo estriado. Lubrificar o rolamento com fluidos de corte.
- Ligue o eixo estriado ao mandril por meio de uma placa de adaptação, que tem um eixo estriado de acoplamento de um lado e do padrão de parafuso do mandril, por outro lado. Neste ponto, o mandril é suportada pelo quadro através do rolamento de impulso e ligado ao motor através da placa de adaptador.
- Instale o conjunto gymbal.
- Construir a estrutura de suporte usando struts U-canal, suportes, eparafusos. Use quatro struts longas como pilares, e utilizar três mais curtos como vigas transversais.
- Prenda os quatro pilares para a tabela de isolamento de vibração usando suportes e parafusos. Conecte o conjunto gymbal à travessa meio usando parafusos e porcas.
- Instalar uma célula de carga orientada a horizontalmente na montagem gymbal; rigidamente ligar um lado da célula de carga para a estrutura de montagem gymbal, quando se ligar o outro lado para o braço gymbal com um fio.
- Monte o atuador piezoelétrico.
- Insira 3 em haste longa, totalmente-threaded através do furo da pilha piezoelétrico; colocar uma lavadora e uma porca em cada extremidade da pilha; deixar cerca de 1/8 de segmento em que sobressai da extremidade de uma porca.
- Apertar as porcas em ambas as extremidades para criar uma pré-carga na pilha. Ligue os longos, roscas expostas ao braço gymbal usando porcas e anilhas. Porca de bolota rosca na outra extremidade do disco piezo-actuador e inserção no mandril (esta porca bolotae disco são utilizados para fins de set-up, não para o teste).
- Ajustar a altura do conjunto gymbal de modo que a porca de bolota está em contacto com a parte superior do disco e o braço é gymbal nível.
- Ajustar a posição do conjunto gymbal de modo que o ponto de contacto entre a porca de bolota e o disco é cerca de 25 mm de distância do centro de rotação do disco. Aperte todos os parafusos no set-up para garantir a estabilidade.
- Configure geração de sinal, amplificação de sinal, e os subsistemas de aquisição de dados.
- Conecte sistema de aquisição de dados para um computador do laboratório. Ligue a saída do gerador de sinal para a entrada de um amplificador eléctrico. Ligar a saída do amplificador de entrada com os fios de a pilha piezoeléctrica. Ligue os monitores amplificadores para o sistema de aquisição de dados.
- Conecte-se a célula de carga para um condicionador de sinal, e em seguida, conecte a saída do condicionador de sinal para o sistema de aquisição de dados.
- Set-up adicional.
- Ligue a mangueira de ar do ar para fazer compras. Fixar a extremidade da mangueira para o quadro de tal modo que os seus pontos de saída do actuador piezo. Tape o ponta do termopar ao actuador piezo. Conecte os cabos de termopares para leitor; pendurar o leitor sobre o quadro.
2. Preparação de Pré-ensaio
- Calibrar a velocidade de rotação do motor.
- Anexar íman para a borda do mandril. Lugar sonda de efeito Hall perto do chuck. Ligue a saída da sonda de efeito de Hall para gaussmeter que está ligado ao sistema de aquisição de dados.
- Abra o software de aquisição de dados e começar a aquisição de dados. Ligue o motor; gire o botão de velocidade do controlador do motor a 10 (a mais baixa velocidade de rotação do motor fornece). Depois que o motor gira em 10 rotações, desligue o motor. Termine de aquisição de dados.
- Analisar os dados guardados; o tempo entre dois picos do sinal de saída a partir do gaussmeter é o tempo para o motor a apodrecerComeram uma revolução completa.
- Rode o botão de 10 a 100 (a mais alta velocidade de rotação do motor fornece) em incrementos de 10; repita os passos 2.1.2 a 2.1.3.
- Coloque almofada sensor de carga entre a porca de bolota e o disco para medir a força normal na interface. Máquina finamente superfície de discos de teste usando um torno mecânico.
- Limpe a porca de bolota e do disco a ser testado imediatamente antes do teste.
- Colocar luvas de plástico e enfrentar mask.Prepare peças de toalhetes de laboratório; dobrá-los em 1 polegada quadrada. Spray de etanol sobre os quadrados de tecido; limpe a superfície da porca de bolota e disco com eles.
- Instale a porca bolota limpo e disco.
- Passe a porca de bolota para o piezo-atuador, aperte-a com uma chave de boca. Insira o disco no mandril; ajustar a posição para assegurar que a ponta da porca de bolota está em contacto com a superfície do disco.
- Alinhar a superfície superior do disco e o braço gymbal. Aperte o mandril de modoque o disco é mantido firmemente.
- Meça a excentricidade da rotação do disco.
- Instale sensor de deslocamento a laser em um dispositivo elétrico, e coloque a fixação junto à tribômetro. Ajustar a altura e o ângulo do sensor, de modo que o disco está dentro do alcance do sensor e o feixe de raios laser é perpendicular ao disco.
- Ligue a saída do sensor para o sistema de aquisição de dados. Iniciar a aquisição de dados. Ligue o motor e rode o disco de 10 rotações; desligar o motor. Termine de aquisição de dados.
3. Execute Testing
- Testes com vibrações ultra-sônicas.
- Cair 2 N em peso de um gancho que se conecta ao braço gymbal através do fio e duas polias. O peso é utilizada para aplicar uma carga normal entre a porca de bolota e o disco.
- Pendurar outra peso 2 N no outro gancho que se conecta ao braço gymbal para fornecer uma pretensão horizontal para a célula de carga.
- Defina o sinalgerador para fornecer um sinal sinusoidal contínuo com DC offset, de 3 V, amplitude de 3 V, e frequência de 22 kHz (a frequência de ressonância do piezo-atuador). Note-se que o 3 V de deslocamento é utilizado para evitar a tensão no actuador piezo.
- Comece aquisição de dados (reduzida força de atrito). Ligue o amplificador e gire o botão de ganho para 15, o que corresponde a um ganho real de 4,67 (os números sobre o botão de ganho são arbitrários).
- Ligue o motor; definir a velocidade de rotação de 6,67 rpm, para proporcionar uma velocidade linear de 20,3 mm / seg. Executar o ensaio durante 4 h.
- Desligue o motor e amplificador, e, em seguida, parar a aquisição de dados. Remova a porca de bolota testado e disco a partir do set-up; Repita os passos 2.3 a 2.5 para instalar a nova porca de bolota e disco.
- Repita os passos 3.1.1 a 3.1.6. No passo 3.1.5, ajustar a velocidade de rotação de 13.3 rpm e 28,7 rpm para proporcionar velocidades lineares de 40,6 mm / s e 87 mm / s, respectivamente; executar os testes para 2 e 0,94 hr correspondingly.
- Ensaios sem vibrações ultra-sônicas.
- Repita o passo 3.1.6 para mudar porcas de bolota e discos. Repita os passos 3.1.1 a 3.1.6 com o amplificador e gerador de sinal de sinal de desligado (o atrito é medido atrito intrínseco).
4. Medidas Optical profilômetro
- Preparação de Medição
- Limpe os discos imediatamente antes de uma medição com o passo 2.3. Faça oito marcas distribuídas uniformemente ao redor da borda do disco. Abra o software profilometer.
- Elevar o cristalino, de modo que há uma folga suficiente entre a plataforma e lentes amostra. Nivelar a plataforma amostra. Coloque um pedaço de laboratório limpe na plataforma.
- Com cuidado, colocar a amostra no topo do tecido com uma das oito marcas voltados para a frente do perfilómetro.
- Configurações de medição.
- Escolha VSI (Vertical-Scanning Interferometria) como o tipo de processamento. Selecione lente 5X paragrande campo de visão e forma global. Escolha 0.55X ampliação para uma área de digitalização de 1,8 mm por 2,4 mm.
- Escolha 1X velocidade de verificação. Definir faixa de varredura para -100 m para 100 m. Traga a lente para baixo em direcção a amostra até que haja uma imagem desfocada na tela. Ajuste a altura da lente até que a imagem é clara.
- Escolha 2 como o número de varrimentos para calcular a média para cada medição. Clique no botão de medição.
- Procedimentos pós-medição.
- Use a receita visão que definido no software para corrigir a imagem crua para a inclinação de toda a amostra. Abrir a caixa de ferramentas de análise no software.
- Obter os valores de rugosidade medidos a partir do "Estatísticas Básicas" item. Obter a perda de volume medido da marca de desgaste dentro da área de digitalização a partir do item "Volume".
- Guardar as imagens dos perfis 1D em X e Y instruções, o perfil 2D, o perfil 3D, bem como a tabela de valores de rugosidade. Rode o amostra até the próxima marca voltada para a frente do profilometer.
- Repita os passos de 4,2-4,3 para os restantes 7 marcas.
- Repita os passos 4.1. para 4,4 em todos os seis discos.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
As medições representativas aqui apresentados foram obtidos a partir do tribômetro modificado, apresentado na Figura 1. O actuador piezoeléctrico gera vibrações com amplitude de 2,5 um a uma frequência de 22 kHz. Para estudar a dependência de atrito e desgaste redução na velocidade linear, três velocidades diferentes (20,3, 40,6, e 87 mm / seg) foram aplicados ao disco, alterando a velocidade de rotação do motor. Para todos os três grupos, o número de rotações do disco e a distância do curso do pino foram escolhidos como 1,600 m e 292,5, respectivamente. O diâmetro nominal de rotação foi de 50 mm. Outros parâmetros, tais como a força normal, a frequência da vibração, amplitude da vibração e permaneceu o mesmo para todos os testes (Tabela 1).
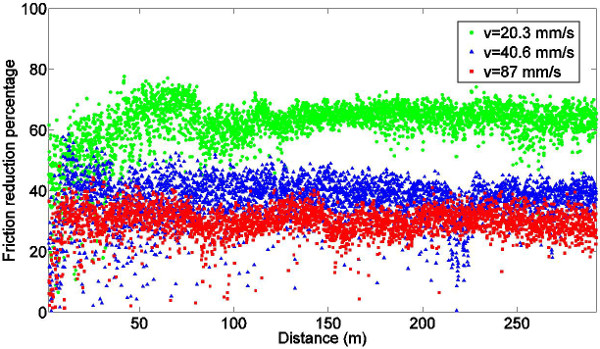
Foi amostrado a força de atrito com uma frequência de 400 Hz utilizando janelas de amostragem de 2 seg. A Figura 2 mostra dados típicos de uma janela de amostragem simples. O fluctuatio observadon na força de atrito é atribuída a stick-slip. Os valores médios da força de atrito foram calculados e representados graficamente contra a distância do curso do pino na Figura 3. Intrínsecos forças de atrito estão representados por pontos na figura, enquanto as forças de fricção com vibrações ultra-sónicas são mostrados marcadores com "X". Verde, azul e vermelho, respectivamente, são usados para os dados de teste a 20,3 mm / seg, 40,6 mm / s, e de 87 mm / seg. Força de atrito de cada teste permanece praticamente constante, uma vez operação de estado estacionário é alcançado.
Disco excentricidade faz com que a aceleração inércia do movimento vertical do pino de montagem e gymbal, o que resulta na variação da força normal. Como resultado, a força de atrito medido flutua como mostrado na Figura 3. Salienta-se que a variação observada na Figura 2 é devido a ficar-derrapante. Considerando-se o valor médio da força de atrito após o sistema ter alcançado o estado estacionário de operação, a figura3 mostra que a força de atrito é mais elevada a velocidades lineares mais elevadas, com ou sem vibrações ultra-sónicas são aplicadas ao sistema. Este resultado é consistente com estudos anteriores que mostraram que a curva de força-velocidade tem uma inclinação positiva para as baixas velocidades lineares 19-21.
A percentagem de redução de atrito é definido como
1. 
onde está a força intrínseca de atrito (força sem vibrações ultra-sônicas, medida no passo 3.2) e é a força de atrito com vibrações ultra-sônicas (medida no passo 3.1.4). A percentagem de redução em cada velocidade linear é traçada contra a distância percorrida pelo pino na Figura 4. Vibrações ultra-sónicas a reduzir a força de atrito no estado estacionário para as três velocidades lineares testados, no entanto, a percentagem decresce à medida que a velocidade aumenta lineares.
Medido atrito no estado estacionárioforças, distância de estabilização, e percentagem de redução de fricção estão listados na Tabela 2. vibrações ultra-sónicas facilitar o processo de quebrar a camada de óxido e formação de contactos estacionários entre o pino e o disco, o que leva a uma distância mais curta para a força de atrito para alcançar constante estado quando vibrações ultra-sônicas estão presentes.
O desgaste abrasivo tem lugar entre na superfície de materiais com diferentes durezas. 22, devido à diferença na dureza do aço inoxidável (700 a 950 kg / mm 2) e de alumínio (45 a 50 kg / mm 2), o desgaste é identificado como abrasivo neste estudo. Visto ranhuras nos discos são mostrados na Figura 5. As imagens A, C, E correspondem aos testes com vibrações ultra-sónicas, enquanto as imagens B, D, F são os dados sem vibrações. Pode ser visto que aparecem mais ranhuras irregulares e não reflectora quando vibrações ultra-sónicas são aplicadas.
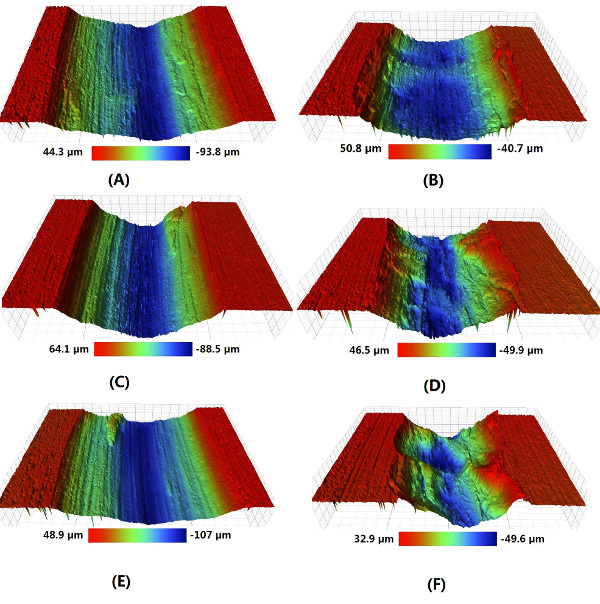
Tridimensional profiles, rugosidade da superfície, e as perdas de volume de sulcos são obtidos a partir de scans profilometer. Perfis 3-D dos sulcos com vibrações de ultra-sons (Figura 6 B, D, F) aparecer mais estreito, menos suave, e uma profundidade menor que aqueles sem vibrações (Figura 6 A, C, E), o que sugere que as vibrações ultra-sónicas causar redução do desgaste .
Para quantificar o grau de redução do desgaste, o desgaste é definida como a taxa
2. 
em que é um disco de perda de volume em mm3 (medida no passo 4.3.2) e é a distância percorrida pelo pino em metros (Tabela 1). Semelhante à percentagem de redução de atrito, a percentagem de redução do desgaste é definida como
3. 
onde representa a taxa de desgaste intrínseca (sem vibrações de ultra-sons) e é com a taxa de desgastevibrações ultrassónicas aplicadas. Os dados da Tabela 3 mostra que as taxas de desgaste e parâmetros de rugosidade de superfície são menores quando vibrações ultra-sónicas estão presentes, o que é um indicador de redução do desgaste. A percentagem de redução do desgaste permanece virtualmente constante à medida que a velocidade aumenta.





dentro-page = "always"> 
Figura 1. Experimental set-up: (A) tribômetro geral; (B) motor; (C) estrutura de suporte; (D) montagem gymbal detalhada; (E) atuador piezoelétrico; e (F) esquemática do sistema. (Esta figura foi modificado a partir de 13).

Figura 2. Dados típicos de uma janela de amostragem. (Esta figura foi modificada a partir de 13.) Por favor, clique aqui para ver uma versão maior desta figura.
931fig3.jpg "/>
Figura 3. Forças de atrito com e sem vibrações ultra-sônicas em várias velocidades. (Esta figura foi modificada a partir de 13) Clique aqui para ver uma versão maior desta figura.

Figura 4. Medido redução de atrito calculado a partir da Eq. (1). (Esta figura foi modificado a partir do 13) Por favor clique aqui para ver uma versão maior desta figura.

Figura 5. sulcos de desgaste obtido com vibr ultra-sônica. ções (A, C, e E) e sem vibrações ultra-sónicas (B, D, e F) Cada coluna corresponde a uma velocidade linear: 20,3 mm / s (A, B); 40,6 mm / s (C, D); e 87 mm / s (E, F). (Este valor foi modificado a partir do 13)

Figura 6. perfis 3D de sulcos de desgaste obtidos sem vibrações ultra-sônicas (A, C, e E) e com vibrações ultra-sônicas (B, D e F) Cada linha representa uma velocidade linear:. 20,3 milímetros / s (A, B); 40,6 mm / s (C, D); e 87 mm / s (E, F). (Este valor foi modificado a partir do 13) Por favor clique aqui para ver uma versão maior desta figura.
| Parâmetro | Valor | ||
| Grupo | 1 | 2 | 3 |
| Velocidade linear (mm / s) | 20,3 | 40,6 | 87 |
| O tempo de funcionamento (h) | 4 | 2 | 0.93 |
| Distância percorrida pelo pino (m) | 292,5 | ||
| Revolutions | 1600 | ||
| Material Pin | Aço inoxidável 316 | ||
| Material de disco | Alumínio 2024 | ||
| Força normal nominal (N) | 3 | ||
| Disco correr para fora (mm) | 0,0286 | ||
| Frequência dos EUA (kHz) | 22 | ||
| Amplitude dos EUA (uM) | 2.5 | ||
| Diâmetro do Groove nominal (mm) 50 | |||
| Temperatura nominal (° C) | 21 ± 1 | ||
| Temperatura nominal actuador (° C) | 31 ± 1 | ||
| Ambiente | Ar do laboratório | ||
| Frequência de amostragem (Hz) | 400 | ||
Tabela 1. Os parâmetros utilizados nos testes tribômetro. (Este quadro foi modificado a partir do 13)
| Velocidade linear (mm / s) | EU | Fricção constante estado (N) | Distância para atingir o estado estacionário (m) | Redução de atrito (%) |
| 20,3 | Não | 1,024 ± 0,063 | 4.17 | 62,22 |
| sim | 0,379 ±0,041 | 2.78 | ||
| 40,6 | Não | 1,201 ± 0,055 | 11,61 | 36.11 |
| sim | 0,748 ± 0,035 | 7,21 | ||
| 87 | Não | 1,472 ± 0,064 | 8,94 | 29.32 |
| sim | 1,041 ± 0,056 | 4,64 |
Tabela 2. forças de atrito no estado de equilíbrio, as distâncias para atingir o estado estacionário, e redução de atrito. (Este quadro foi modificado a partir do 13)
| Velocidade linear (mm / s) | EU | R-A (mm) | R q (um) | Rt (mm) | Taxa de desgaste (mm 3 / m) | Número de contactos | |
| 20,3 | Não | 18,829 | 21,421 | 124,35 | 2,237 x 10 -2 | 45,76 | |
| sim | 17,238 | 18,975 | 87,011 | 1,214 x 10 -2 | 3,17 x 10 8 | ||
| 40,6 | Não | 21,647 | 22,673 | 109,28 | 2,581 x 10 -2 | 48,18 | |
| sim | 17,289 | 19,922 | 106,42 | 1,338 x 10 -2 | 1,58 x 10 8 | ||
| 87 | Não | 19,825 | 21,921 | 130,52 | 2,43 x 10 -2 | 48,63 | |
| sim | 17,606 | 111,25 | 1,248 x 10 -2 | 7,39 x 10 8 |
Tabela 3. Comparação da taxa de desgaste, número de contatos, e os parâmetros de rugosidade superficial (média aritmética; raiz quadrado médio; altura máxima do perfil) (Este quadro foi modificado a partir do 13).
Subscription Required. Please recommend JoVE to your librarian.
Discussion
As experiências foram realizadas usando este protocolo para estudar o efeito da velocidade linear na redução de atrito e desgaste de ultra-sons. As medições mostram que vibrações ultra-sônicas efetivamente reduzir o atrito eo desgaste em três velocidades lineares. Consistente com as observações anteriores, a quantidade de redução de atrito diminui de 62,2% a 20,3 mm / s a 29,3% a 87 mm / seg. Redução do desgaste é desprezível com a mudança de velocidade linear (45,8% para 48,6%).
As propriedades dos materiais, tais como módulo e rendimento de força de Young pode mudar quando ondas ultra-sônicas são transmitidas através do material. Este é muitas vezes referida como ultra-sons 23 de amolecimento. Neste estudo, devido à diferença de rigidez entre o piezo-atuador e outras partes do set-up, as vibrações de 22 kHz criadas pelo atuador não transmite à outra parte experimental set-up, embora de um modo de vibração estrutura em torno de 100 Hz estava animado quando vib ultra-sônicarações foram aplicados. Na interface entre o pino e o disco, vibrações ultra-sónicas causar a geração de calor o que irá provocar o aumento da temperatura na interface. No entanto, com base em experiências realizadas por Dong e Dapino, a elevação de temperatura se situa num intervalo que provoca alterações insignificantes para as propriedades do material.
Uma limitação desta experiência é de que não existe um mecanismo para eliminar a oscilação do disco, o que pode causar o movimento vertical do pino, gymbal braço, e peso. Aceleração da massa em movimento resultados em variações da força normal efectivo aplicado na interface, por conseguinte, as forças de atrito medido. Portanto, é fundamental para garantir que o eixo do motor, eixo estriado, mandril, e disco são de nível. Variabilidade experimental pode ser reduzida quando a quantidade de oscilação é minimizado.
Também é fundamental para apertar firmemente a porca de bolota para o atuador piezoelétrico de modo que a porca de bolota não se soltarem durante o teste. Extremistavibrações sonoras são ineficazes para reduzir a força de atrito se as vibrações não são transmitidos para a interface. Se a força de atrito de repente, salta para um nível mais elevado durante o teste, é altamente provável por causa de uma conexão solta entre a porca de bolota e do atuador. Esta edição é acompanhada por um zumbido para que possa ser facilmente detectado.
Um atuador piezo-elétrico-motorizado gera calor que pode aumentar sua temperatura rapidamente se nenhum arrefecimento é empregado. É essencial para ajustar o fluxo de ar a um nível adequado para remover o calor e manter a temperatura constante do actuador. Mesmo quando o actuador piezo-se desligado durante os testes sem vibrações ultra-sónicas, o mesmo fluxo de ar deve ainda ser aplicada de modo que as condições de teste permanecem as mesmas para todos os testes.
Em comparação com o trabalho anterior, este atrito e desgaste estudos protocolo simultaneamente, no mesmo ensaio, o que não foi feito anteriormente sistematicamente. O gymbalmontagem permite uma abordagem mais directa para medir as forças de atrito na interface do que outros métodos que derivam tanto de atrito a partir de uma força de actuação ou de medição de outros parâmetros físicos, tais como a deformação ou torção. O titular disco projetado e construído para estes testes permite a mudança conveniente de amostras de teste com várias dimensões, materiais e rugosidade da superfície. O profilometer óptica fornece informações como perfis 3D e rugosidade da superfície para estudar a redução de desgaste, o que proporciona uma compreensão mais detalhada de cicatrizes desgaste do que a perda de volume ou perda de peso medições. Com estas vantagens, este protocolo pode ser utilizado para investigar a dependência da fricção de ultra-sons e redução de desgaste em muitos outros parâmetros, tais como a tensão normal, a dureza do material, aspereza de superfície, e a amplitude de vibração.
Subscription Required. Please recommend JoVE to your librarian.
Acknowledgments
Os autores gostariam de agradecer Tim Krantz da NASA Glenn e Duane Detwiler da Honda R & D para o seu apoio técnico e contribuições em espécie. O apoio financeiro para esta pesquisa foi fornecido pelas organizações membros da Conceitos Centro Inteligente de Veículos (www.SmartVehicleCenter.org), um Science Foundation Indústria / Universidade Cooperativa Centro Nacional de Pesquisa (I / UCRC). SD é suportado por um Smart Veículos Conceitos Graduate Fellowship e uma bolsa de estudo da Universidade de The Graduate School da Universidade Estadual de Ohio.
Materials
| Name | Company | Catalog Number | Comments |
| DC Motor | Minarik | SL14 | |
| Electrical amplifier | AE Techron | LVC5050 | |
| Signal conditioner | Vishay Measurements Group | 2310 | |
| Signal generator | Agilent | 33120A | |
| Piezoelectric stack | EDO corporation | EP200-62 | |
| Load cell | Transducer Techniques | MLP-50 | |
| Load sensor pad | FlexiForce | A201 | |
| Laser meter | Keyence corporation | LK-G32 | |
| Hall-effect probe and gaussmeter | Walker Scientific, Inc. | MG-4D | |
| Data acquisition module | Data Physics | Quattro | |
| Data acquisition software | Data Physics | SignalCalc Ace | |
| Thermocouple reader | Omega | HH22 | |
| Optical profilometer | Bruker | Contour GT | |
| Profilometer operation software | Bruker | Vision 64 |
References
- Bhushan, B. Introduction to tribology. , John Wiley & Sons. New York. (2002).
- Severdenko, V., Klubovich, V., Stepanenko, A. Ultrasonic rolling and drawing of metals. , Consultants Bureau. New York and London. (1972).
- Taylor, R., Coy, R. Improved fuel efficiency by lubricant design: a review. Proc. Instit. Mech. Eng., Part J: J Eng. Tribol. 214 (1), 1-15 (2000).
- Littmann, W., Storck, H., Wallaschek, J. Sliding friction in the presence of ultrasonic oscillations: superposition of longitudinal oscillations. Arch. Appl. Mech. 71 (8), 549-554 (2001).
- Littmann, W., Storck, H., Wallaschek, J. Reduction in friction using piezoelectrically excited ultrasonic vibrations. Proc. SPIE. 4331, (2001).
- Bharadwaj, S., Dapino, M. J. Friction control in automotive seat belt systems by piezoelectrically generated ultrasonic vibrations. Proc. SPIE. 7645, 7645E (2010).
- Bharadwaj, S., Dapino, M. J. Effect of load on active friction control using ultrasonic vibrations. Proc. SPIE. 7290, 7290G (2010).
- Kumar, V., Hutchings, I. Reduction of the sliding friction of metals by the application of longitudinal or transverse ultrasonic vibration. Tribol. Int. 37 (10), 833-840 (2004).
- Pohlman, R., Lehfeldt, E. Influence of ultrasonic vibration on metallic friction. Ultrasonics. 4 (4), 178-185 (1966).
- Popov, V., Starcevic, J., Filippov, A. Influence of Ultrasonic In-Plane Oscillations on Static and Sliding Friction and Intrinsic Length Scale of Dry Friction Processes. Tribol. Lett. 39 (1), 25-30 (2010).
- Dong, S., Dapino, M. J. Piezoelectrically-induced ultrasonic lubrication by way of Poisson effect. Proc. SPIE. 8343, 83430L (2012).
- Dong, S., Dapino, M. J. Elastic-plastic cube model for ultrasonic friction reduction via Poisson effect. Ultrasonics. 54 (1), 343-350 (2014).
- Dong, S., Dapino, M. J. Wear Reduction Through Piezoelectrically-Assisted Ultrasonic Lubrication. Smart. Mater. Struct. 23 (10), 104005 (2014).
- Chowdhury, M., Helali, M. The effect of frequency of vibration and humidity on the wear rate. Wear. 262 (1-2), 198-203 (2014).
- Bryant, M., Tewari, A., York, D. Effect of Micro (rocking) vibrations and surface waviness on wear and wear debris. Wear. 216 (1), 60-69 (1998).
- Bryant, M., York, D. Measurements and correlations of slider vibrations and wear. J. Tribol. 122 (1), 374-380 (2000).
- Goto, H., Ashida, M., Terauchi, Y. Effect of ultrasonic vibration on the wear characteristics of a carbon steel: analysis of the wear mechanism. Wear. 94, 13-27 (1984).
- Goto, H., Ashida, M., Terauchi, Y. Wear behaviour of a carbon steel subjected to an ultrasonic vibration effect superimposed on a static contact load. Wear. 110 (2), 169-181 (1986).
- Robinowicz, E. The friction and wear of materials. , Wiley. New Jersey. (1965).
- Bowden, F., Freitag, E. The friction of solids at very high speeds. Proc. R. Soc. A. 248 (1254), 350-367 (1985).
- Burwell, J., Rabinowicz, E.
- Cocks, M.
- Rusinko, A. Ultrasound and Irrecoverable Deformation in Metals. , LAP Lambert Academic Publishing. Saarbrücken. (2012).

{kind=link}
{kind=link}