

Abstract
घर्षण और पहनने इंजीनियर प्रणालियों के लिए हानिकारक हैं। दो रपट सतहों के बीच इंटरफेस ध्वनिक सीमा (20 किलो हर्ट्ज) के ऊपर एक आवृत्ति पर स्फूर्त है जब अल्ट्रासोनिक स्नेहन हासिल की है। पारंपरिक स्नेहक अव्यावहारिक या अवांछनीय हैं, जहां एक ठोस राज्य प्रौद्योगिकी के रूप में, अल्ट्रासोनिक स्नेहन के लिए इस्तेमाल किया जा सकता है। इसके अलावा, अल्ट्रासोनिक स्नेहन दो रपट सतहों के बीच प्रभावी घर्षण गुणांक के बिजली के मॉडुलन के लिए अनुमति देता है। यह संपत्ति उनकी घर्षण राज्य और परिचालन की स्थिति बदलने के रूप में जुड़े गतिशील प्रतिक्रिया को संशोधित कि अनुकूली सिस्टम सक्षम बनाता है। सतह पहनने भी अल्ट्रासोनिक स्नेहन के माध्यम से कम किया जा सकता है। हम घर्षण बल में कमी की निर्भरता की जांच और ultrasonically lubricated सतहों के बीच रैखिक रपट वेग पर कमी पहनने के लिए एक प्रोटोकॉल विकसित की है। एक पिन-ऑन-डिस्क tribometer एक पीजोइलेक्ट्रिक ढेर 22 पर पिन कंपन करने के लिए प्रयोग किया जाता है कि में वाणिज्यिक इकाइयों से अलग है जो बनाया गया थाघूर्णन डिस्क की सतह के लिए सामान्य किलोहर्ट्ज़। 20.3, 40.6, और 87 मिमी / सेकंड: प्रभावी घर्षण बल, मात्रा घटाने, और सतह खुरदरापन सहित घर्षण और पहनने मेट्रिक्स के बिना और 4 एमपीए और तीन अलग अलग रपट वेग के लिए 1 के एक लगातार दबाव में अल्ट्रासोनिक कंपन के साथ मापा जाता है। एक ऑप्टिकल profilometer पहनने सतहों को चिह्नित करने के लिए उपयोग किया जाता है। प्रभावी घर्षण बल 20.3 मिमी / सेकंड में 62% से कम है। लगातार अल्ट्रासोनिक स्नेहन के लिए मौजूदा सिद्धांतों के साथ, घर्षण बल में प्रतिशत की कटौती की 87 मिमी / सेकंड में नीचे 29% घर्षण बल में कमी करने के लिए, गति बढ़ाने के साथ घटता है। पहनें कमी माना तीन गति पर (49%) अनिवार्य रूप से स्थिर बनी हुई है।
Introduction
वे एक दूसरे से रोल रिश्तेदार स्लाइड या जब घर्षण दो से संपर्क सतहों के इंटरफेस में मौजूद है। घर्षण आमतौर पर घर्षण या चिपकने पहनने के साथ-साथ होता है। 1 Ultrasonics वह यह है कि उच्च आवृत्ति घटना के पीछे का विज्ञान है, लहरों ध्वनिक सीमा (20 किलो हर्ट्ज) के ऊपर आवृत्तियों पर यात्रा। ultrasonics के क्षेत्र में दो मौलिक रूप से अलग व्यवस्थाओं शामिल हैं। एक व्यवस्था ऐसी चिकित्सा अल्ट्रासाउंड या संरचनाओं की गैर विनाशकारी निरीक्षण के रूप में इमेजिंग प्रक्रियाओं में उपयोग उन लोगों की तरह कम तीव्रता तरंगों शामिल है। अन्य उच्च ऊर्जा तरंगों पर अमल या इस तरह के प्लास्टिक और धातु की वेल्डिंग के रूप में इंजीनियरिंग प्रक्रियाओं की सहायता के लिए उपयोग किया जाता है, जिसमें एक उच्च शक्ति शासन है। संपर्क रपट इंटरफेस में प्रभावी घर्षण बल को कम कर देता में यह दो सतहों के इंटरफेस में अल्ट्रासोनिक कंपन के उत्तरार्द्ध तरह का है कि आवेदन दिखाया गया है। इस घटना अल्ट्रासोनिक स्नेहन के रूप में जाना जाता है।
प्राप्त करने के लिएदो रपट वस्तुओं के बीच अल्ट्रासोनिक स्नेहन, अल्ट्रासोनिक आवृत्तियों पर रिश्तेदार कंपन उन दोनों के बीच स्थापित किया जाना चाहिए। कंपन आम तौर पर अनुदैर्ध्य, अनुप्रस्थ, या रपट वेग के सापेक्ष सीधा दिशा में, या तो दो वस्तुओं में से एक को लागू कर रहे हैं। इसकी टिप tribometer के घूर्णन डिस्क को सीधा दिशा में कंपन करती है, ताकि इस अध्ययन में, एक tribometer की पिन एक piezoelectric actuator के साथ फिट है। Piezoelectric सामग्री उत्तेजना क्षेत्र के रूप में एक ही आवृत्ति पर हिल, बिजली क्षेत्र के संपर्क में जब ख़राब है कि 'स्मार्ट' सामग्री के एक वर्ग के हैं। Piezoelectric सामग्री मेगाहर्ट्ज रेंज में अच्छी तरह से आवृत्तियों पर कांपना कर सकते हैं। स्थूल वेग के लिए आरोपित किया जा रहा है, अल्ट्रासोनिक कंपन तात्कालिक घर्षण बल की दिशा और संयोजन में प्रभावी घर्षण बल और सतह पहनने की कमी आती है जो सतहों के बीच संपर्क, बारी का प्रभाव है। अल्ट्रासोनिक घर्षण कमी व्यावहारिक विनिर्माण सिस्टम में प्रदर्शन किया गया है। उदाहरण के लिए, इस तकनीक के उपकरण और धातु मशीनिंग में काम टुकड़ा है और इस तरह से ड्रिलिंग, दबाव, चादर रोलिंग, और तार खींचने के रूप में प्रक्रियाओं के गठन के बीच बल को कम करने के लिए उपयोग किया गया है। लाभ सतह खत्म 2 और अंतिम उत्पाद से स्नेहक दूर करने के लिए महंगा है और पर्यावरण की दृष्टि से हानिकारक डिटर्जेंट के लिए एक कम आवश्यकता में सुधार शामिल हैं। संभावित अन्य क्षेत्रों में अल्ट्रासोनिक स्नेहन के अनुप्रयोगों के रूप में अच्छी तरह से कर रहे हैं। उदाहरण के लिए, अल्ट्रासोनिक स्नेहन काफी स्नेहक या कोटिंग्स के लिए आवश्यकता को नष्ट करने से व्यक्तिगत स्वास्थ्य देखभाल उत्पादों में उपयोगकर्ता के अनुभव बढ़ा सकते हैं। वाहन सीटें और पटरियों के बीच घर्षण कम करने अन्यथा पारंपरिक घटकों और mechani के कब्जे में किया जाएगा कि सीट आंदोलन, अंतरिक्ष की बचत और जन की सुविधा है, जबकि ऑटोमोबाइल अनुप्रयोगों में, घर्षण मॉडुलन गेंद जोड़ों के प्रदर्शन में सुधार कर सकते हैंएसएमएस। अल्ट्रासोनिक स्नेहन भी पावरट्रेन और सस्पेंशन सिस्टम में घर्षण को कम करके ईंधन दक्षता में सुधार करने में मदद कर सकते हैं। 3 पारंपरिक स्नेहक इस्तेमाल नहीं किया जा सकता है, जहां अंतरिक्ष अनुप्रयोग, में, अल्ट्रासोनिक स्नेहन पहनने को कम करने और नाटकीय रूप से महत्वपूर्ण घटक के जीवन का विस्तार करने के लिए नियोजित किया जा सकता है।
अल्ट्रासोनिक स्नेहन के माध्यम से घर्षण कम करने की प्रयोगशाला प्रदर्शनों कई हैं। घर्षण कम करने अल्ट्रासोनिक स्नेहन और लागू अल्ट्रासोनिक कंपन के साथ घर्षण बल के बिना मापा घर्षण बल के बीच अंतर के रूप में मात्रा निर्धारित है। या तो मामले में, घर्षण बल सीधे बल सेंसर के साथ मापा जाता है। Littmann एट अल। 4-5 एक बल सेंसर और एक फ्रेम घर्षण बलों को मापने और सामान्य भार को लागू करने के लिए स्थापित किया गया है, जिस पर एक स्लाइडर, एक piezoelectrically संचालित क्रियाकारक जुड़ा हुआ है। एक वायवीय actuator एक गाइड रेल के साथ actuator के साथ एक साथ स्लाइडर पुश करने के लिए नियुक्त किया गया था। Ultrasoniसी कंपन अनुदैर्ध्य रपट वेग करने के लिए दिशा में लागू किया गया। भारद्वाज और Dapino 6-7 ढेर के दोनों छोर पर एक शंक्वाकार waveguide से जुड़ा एक पीजोइलेक्ट्रिक ढेर क्रियाकारक का उपयोग करते हुए इसी तरह के प्रयोगों का आयोजन किया। संपर्क शंकु की गोलाकार किनारों और गाइड रेल की सतह के बीच जगह ले ली। इस तरह के संपर्क कठोरता, सामान्य लोड, और वैश्विक कठोरता के रूप में प्रणाली मानकों के प्रभाव का अध्ययन किया गया। कुमार और हचइंग्स 8 एक अल्ट्रासोनिक transducer द्वारा सक्रिय किया गया था, जो एक sonotrode पर एक पिन स्थापित किया। अल्ट्रासोनिक कंपन उत्पन्न होता है और एक उपकरण स्टील सतह के साथ संपर्क में रखा गया था जो पिन, को प्रेषित किया गया। सामान्य बल एक वायवीय सिलेंडर से आवेदन किया है और एक लोड सेल द्वारा मापा गया था। पिन और डिस्क के बीच सापेक्ष गति एक घूमकर तालिका द्वारा बनाया गया था।
Pohlman और Lehfeldt 9 भी एक पिन-ऑन-डिस्क प्रयोग लागू किया है। अन्य अध्ययनों के विपरीत, वे एक magnetostrict कार्यरतअल्ट्रासोनिक कंपन उत्पन्न करने के लिए ट्रांसड्यूसर ive। अल्ट्रासोनिक घर्षण कम करने के लिए इष्टतम दिशा का अध्ययन करने के लिए, ट्रांसड्यूसर ध्यान से गठबंधन किया गया था इसलिए कंपन दिशा स्थूल वेग को, अनुदैर्ध्य अनुप्रस्थ, और ऊर्ध्वाधर था। वे सूखी और चिकनाई दोनों सतहों पर अल्ट्रासोनिक घर्षण कमी का अध्ययन किया। पोपोव एट अल। 10 शंक्वाकार waveguides के साथ एक actuator का उपयोग किया। क्रियाकारक एक घूर्णन बेस प्लेट के साथ संपर्क में रखा गया था। विभिन्न hardnesses के साथ नौ सामग्री से बना कोन अल्ट्रासोनिक घर्षण कम करने पर सामग्री कठोरता के प्रभाव का अध्ययन करने के लिए अपनाया गया था। दांग और Dapino 11-13 पैदा करते हैं और गोल किनारों के साथ एक प्रिज्मीय waveguide के लिए अल्ट्रासोनिक कंपन संचारित करने के लिए एक पीजोइलेक्ट्रिक ट्रांसड्यूसर इस्तेमाल किया। अनुदैर्ध्य कंपन के कारण प्वासों प्रभाव के लिए खड़ी कंपन का कारण बनता है। एक घुमावदार शीर्ष के साथ एक स्लाइडर waveguide के तहत और संपर्क में रखा गया था। एक फ्रेम संपर्क इंटरफेस में सामान्य बलों लागू करने के लिए बनाया गया था। टीवह स्लाइडर waveguide के केंद्र क्षेत्र के आसपास मैन्युअल खींच लिया था; घर्षण बल स्लाइडर से जुड़ा था कि एक लोड सेल द्वारा मापा गया था।
Ultrasonically प्रेरित पहनने कमी भी जांच की और प्रदर्शन किया गया। मात्रा घटाने, वजन घटाने, और सतह खुरदरापन परिवर्तन wear.Chowdhury की गंभीरता को यों के लिए कार्यरत हैं और Helali 14 एक पिन-ऑन-डिस्क सेटअप में एक घूर्णन डिस्क स्फूर्त। कंपन घूर्णन डिस्क के अंतर्गत स्थित दो समानांतर प्लेटों की एक समर्थन संरचना द्वारा उत्पन्न किया गया। शीर्ष प्लेट नीचे प्लेट के ऊपर की सतह पर उत्कीर्ण किया गया था कि एक स्लॉट में स्लाइड जो बंद केंद्र नीचे की सतह पर स्थापित एक गोलाकार गेंद है। ऊपर थाली रोटेशन के दौरान खड़ी चलता है कि इतनी स्लॉट एक समय समय पर चर गहराई के साथ machined किया गया था। आवृत्तियों घूर्णन गति के अनुसार 100 हर्ट्ज के आसपास बताया गया।
ब्रायंट और न्यूयॉर्क 15-16 डब्ल्यू पर सूक्ष्म कंपन के प्रभाव का अध्ययनकान में कमी। एक छोर एक कताई इस्पात डिस्क और एक तार वसंत से जुड़ा दूसरे छोर पर विश्राम के साथ वे एक धारक के माध्यम से एक कार्बन सिलेंडर डाला। कंपन के लिए कोई जगह नहीं थी कि इतना एक मामले में, सिलेंडर सुखद धारक में लगाया गया था। अन्य मामलों में, मंजूरी सिलेंडर कताई डिस्क के साथ संपर्क में था, जबकि सिलेंडर की सूक्ष्म कंपन की अनुमति के लिए छोड़ दिया गया। सिलेंडर का वजन कम पहनने दर की गणना करने के लिए मापा गया था। यह स्वयं उत्पन्न सूक्ष्म कंपन करने के लिए 50% से पहनने को कम करने में मदद मिली है कि दिखाया गया था।
गोटो और Ashida 17-18 भी एक पिन-ऑन-डिस्क प्रयोग अपनाया। वे एक पतला शंकु और एक सींग के माध्यम से एक ट्रांसड्यूसर के साथ पिन नमूने जुड़ा हुआ है। पिन डिस्क की सतह के लिए सीधा दिशा में स्फूर्त। एक बड़े पैमाने पर सामान्य भार को लागू करने के लिए अपने शीर्ष पर ट्रांसड्यूसर से जुड़ा था। घर्षण बलों डिस्क को घुमाने के लिए लागू किया गया था कि टोक़ से अनुवाद किया गया। पहनें क्योंकि दोनों चिपकने के रूप में पहचान की गई थीपिन और डिस्क कार्बन स्टील के बने थे। पहनें दरों की मात्रा घटाने माप से गणना की गई।
यह रेखीय गति अल्ट्रासोनिक स्नेहन में एक महत्वपूर्ण भूमिका निभाता है कि दिखाया गया है। इस शोध के प्रयोगात्मक घटक रेखीय गति पर घर्षण और पहनने में कमी की निर्भरता पर केंद्रित है।
Subscription Required. Please recommend JoVE to your librarian.
Protocol
संशोधित Tribometer 1. विकास
- चक-मोटर सब-सिस्टम स्थापित करें।
- लेवल कंपन अलगाव तालिका। मेज पर डीसी मोटर की जगह; shims के साथ मोटर के स्तर और struts और बोल्ट के साथ यह तय कर लो। मोटर के आसपास समर्थन फ्रेम रखें।
- एक कुंजी का उपयोग मोटर शाफ्ट को splined शाफ्ट कनेक्ट करें। Splined शाफ्ट थाली में छेद के माध्यम से जाने के साथ सीमा पर समर्थन थाली रखो। सेट का समर्थन प्लेट पर और splined शाफ्ट के आसपास सुई रोलर असर जोर दिया। तरल पदार्थ को काटने के साथ असर चिकना।
- एक splined एक तरफ शाफ्ट युग्मन और दूसरी तरफ चक बोल्ट पैटर्न है, जो एक एडाप्टर थाली, के माध्यम से चक splined शाफ्ट कनेक्ट करें। इस बिंदु पर, चक जोर असर के माध्यम से फ्रेम के द्वारा समर्थित है और अनुकूलक प्लेट के माध्यम से मोटर से जुड़े।
- Gymbal विधानसभा स्थापित करें।
- यू-चैनल struts, कोष्ठक का उपयोग समर्थन फ्रेम निर्माण, औरबोल्ट। खंभे के रूप में चार लंबे struts प्रयोग करें, और क्रॉस बीम के रूप में तीन छोटे कद के लोगों का उपयोग करें।
- कोष्ठक और बोल्ट का उपयोग कंपन अलगाव की मेज पर चार स्तंभों सुरक्षित। बोल्ट और पागल का उपयोग कर बीच क्रॉस बीम को gymbal विधानसभा कनेक्ट करें।
- Gymbal विधानसभा में एक क्षैतिज उन्मुख लोड सेल स्थापित करें; एक तार के साथ gymbal हाथ करने के लिए दूसरे पक्ष को जोड़ने जबकि सख्ती से, gymbal विधानसभा के फ्रेम करने के लिए लोड सेल के एक तरफ से कनेक्ट।
- पीजोइलेक्ट्रिक क्रियाकारक इकट्ठे।
- पीजोइलेक्ट्रिक ढेर के छेद के माध्यम से लंबे समय तक, पूरी तरह से पिरोया रॉड में 3 डालें; एक वॉशर और ढेर के प्रत्येक के अंत में एक अखरोट डाल; के बारे में 1/8 एक अखरोट के अंत से फैला हुआ धागे की में छोड़ दें।
- दोनों के ढेर में एक प्रीलोड बनाने के लिए समाप्त हो जाती है पर नट कस। नट और वाशर का उपयोग gymbal हाथ करने के लिए लंबे समय तक, खुले धागे कनेक्ट करें। चक में पीजो actuator और डालने डिस्क के दूसरे छोर पर धागा बलूत का फल अखरोट (इस बलूत का फल अखरोटऔर डिस्क) नहीं परीक्षण के लिए, सेट-अप प्रयोजनों के लिए उपयोग किया जाता है।
- बलूत का फल अखरोट डिस्क के शीर्ष के साथ संपर्क में है और gymbal हाथ स्तर इतना है कि gymbal विधानसभा की ऊंचाई को समायोजित करें।
- बलूत का फल अखरोट और डिस्क के बीच संपर्क बिंदु के बारे में 25 मिमी दूर डिस्क की घूर्णी केंद्र से इतना है कि gymbal विधानसभा की स्थिति को समायोजित करें। स्थिरता सुनिश्चित करने के लिए सेट-अप में सभी बोल्ट कस।
- संकेत पीढ़ी, संकेत प्रवर्धन, और डाटा अधिग्रहण उप-प्रणालियों की स्थापना की।
- एक प्रयोगशाला कंप्यूटर से डाटा अधिग्रहण प्रणाली कनेक्ट करें। एक बिजली एम्पलीफायर के इनपुट के लिए संकेत जनरेटर के उत्पादन में कनेक्ट करें। पीजोइलेक्ट्रिक ढेर के इनपुट तारों के साथ एम्पलीफायर उत्पादन कनेक्ट करें। डाटा अधिग्रहण प्रणाली से एम्पलीफायर पर नज़र रखता कनेक्ट करें।
- एक संकेत कंडीशनर करने के लिए लोड सेल कनेक्ट, और फिर डाटा अधिग्रहण प्रणाली से संकेत कंडीशनर का उत्पादन कनेक्ट।
- अतिरिक्त सेट-अप।
- हवा की दुकान के लिए हवा नली कनेक्ट करें। ऐसे पीजो क्रियाकारक में अपने आउटलेट अंक कि फ्रेम करने के लिए नली के अंत को ठीक करें। पीजो actuator के लिए thermocouple के टिप टेप। पाठक को thermocouple सुराग कनेक्ट; सीमा पर पाठक लटका।
2. पूर्व परीक्षा की तैयारी
- मोटर की घूर्णन गति जांचना।
- चक के रिम के लिए चुंबक देते हैं। चक के करीब प्लेस हॉल प्रभाव की जांच। कि डाटा अधिग्रहण प्रणाली से जुड़ा है gaussmeter करने के लिए हॉल प्रभाव की जांच के उत्पादन में कनेक्ट।
- डाटा अधिग्रहण सॉफ्टवेयर खोलें और डाटा अधिग्रहण शुरू करते हैं। मोटर चालू करें; 10 (मोटर प्रदान करता है सबसे कम घूर्णन गति) को मोटर नियंत्रक की गति घुंडी बारी है। मोटर 10 क्रांतियों के लिए घूमता है, के बाद मोटर बंद कर देते हैं। डाटा अधिग्रहण खत्म होता है।
- सहेजे गए डेटा का विश्लेषण करें; gaussmeter से उत्पादन में संकेत की दो चोटियों के बीच समय मोटर सड़ने के लिए समय हैएक पूर्ण क्रांति खा लिया।
- 10 की वेतन वृद्धि में 10 से 100 (उच्चतम घूर्णन गति मोटर प्रदान करता है) से घुंडी बारी; दोहराने 2.1.3 के लिए 2.1.2 कदम।
- इंटरफेस में सामान्य बल को मापने के लिए बलूत का फल अखरोट और डिस्क के बीच लोड सेंसर पैड रखें। पतले मशीन एक खराद का उपयोग कर परीक्षण डिस्क की सतह।
- साफ बलूत का फल अखरोट और डिस्क परीक्षण से ठीक पहले परीक्षण किया जाना है।
- प्लास्टिक के दस्ताने पर रखो और प्रयोगशाला पोंछे के mask.Prepare टुकड़े का सामना करना; 1 इंच वर्गों में उन्हें गुना। ऊतक वर्गों पर इथेनॉल स्प्रे; धीरे उनके साथ बलूत का फल अखरोट और डिस्क की सतह पोंछे।
- स्वच्छ बलूत का फल अखरोट और डिस्क स्थापित करें।
- , पीजो क्रियाकारक पर बलूत का फल अखरोट धागा एक खुले अंत रिंच के साथ यह कस लें। चक में डिस्क डालें; यकीन बलूत का फल अखरोट की नोक डिस्क की सतह के साथ संपर्क में है बनाने के लिए स्थिति को समायोजित।
- डिस्क और gymbal हाथ के ऊपर की सतह संरेखित करें। इसलिए चक कसोडिस्क मजबूती से आयोजित किया जाता है कि।
- डिस्क रोटेशन की ठहरना उपाय।
- एक स्थिरता में लेजर विस्थापन सेंसर स्थापित करें, और tribometer के बगल में स्थिरता जगह है। डिस्क सेंसर की सीमा के भीतर है और लेजर बीम डिस्क के लिए सामान्य है तो यह है कि सेंसर की ऊंचाई और कोण समायोजित करें।
- डाटा अधिग्रहण प्रणाली के लिए संवेदक के उत्पादन में कनेक्ट करें। डाटा अधिग्रहण शुरू करो। मोटर चालू करें और 10 क्रांतियों के लिए डिस्क बारी बारी से; मोटर बंद कर देते हैं। डाटा अधिग्रहण खत्म होता है।
3. परीक्षण
- अल्ट्रासोनिक कंपन के साथ टेस्ट।
- तार और दो पुली के माध्यम से gymbal बांह को जोड़ता है कि एक हुक पर लटका 2 एन वजन। वजन बलूत का फल अखरोट और डिस्क के बीच एक सामान्य लोड लागू करने के लिए प्रयोग किया जाता है।
- लोड सेल के लिए एक क्षैतिज गुमान प्रदान करने के लिए gymbal बांह को जोड़ता है कि अन्य हुक पर एक और 2 एन वजन रखती।
- संकेत सेटडीसी के साथ एक सतत sinusoidal संकेत प्रदान करने के लिए जनरेटर, 3 वी के 3 वी के आयाम ऑफसेट, और 22 किलोहर्ट्ज़ (पीजो actuator के अनुनाद आवृत्ति) की आवृत्ति। ऑफसेट 3 वी पीजो actuator में तनाव को रोकने के लिए प्रयोग किया जाता है कि ध्यान दें।
- डाटा अधिग्रहण (कम घर्षण बल) की शुरुआत करें। एम्पलीफायर पर मुड़ें और 4.67 की एक वास्तविक लाभ (लाभ घुंडी पर संख्या मनमानी कर रहे हैं) से मेल खाती है, जिसमें से 15 लाभ घुंडी बारी है।
- मोटर चालू करें; 20.3 मिमी / सेकंड की एक रेखीय वेग प्रदान करने के लिए 6.67 rpm के लिए घूर्णन गति निर्धारित किया है। 4 घंटे के लिए परीक्षण चलाएँ।
- मोटर और एम्पलीफायर को बंद कर दें, और उसके बाद डाटा अधिग्रहण बंद करो। सेट-अप से परीक्षण किया बलूत का फल अखरोट और डिस्क निकालें; दोहराएँ नई बलूत का फल अखरोट और डिस्क स्थापित करने के लिए 2.3-2.5 कदम।
- दोहराएँ 3.1.6 के लिए 3.1.1 कदम। कदम 3.1.5 में, 13.3 rpm और क्रमश: 40.6 मिमी / सेकंड और 87 मिमी / सेकंड की रेखीय वेग प्रदान करने के लिए 28.7 rpm के लिए घूर्णन गति सेट; 2 और 0.94 घंटा CORRESP के लिए परीक्षण चलानेondingly।
- अल्ट्रासोनिक कंपन के बिना टेस्ट।
- दोहराएँ कदम 3.1.6 बलूत नट और डिस्क बदलने के लिए। दोहराएँ संकेत जनरेटर और संकेत एम्पलीफायर बंद (मापा घर्षण आंतरिक घर्षण है) के साथ 3.1.6 के लिए 3.1.1 कदम।
4. ऑप्टिकल profilometer माप
- मापन तैयारी
- 2.3 कदम का उपयोग कर माप से पहले तुरंत डिस्क को साफ करें। डिस्क के रिम के आसपास आठ समान रूप से वितरित निशान बना। Profilometer सॉफ्टवेयर खोलें।
- लेंस और नमूना मंच के बीच पर्याप्त निकासी इतना है कि वहाँ लेंस उठाएँ। नमूना मंच के स्तर। मंच पर पोंछे प्रयोगशाला का एक टुकड़ा रखें।
- धीरे profilometer के सामने का सामना करना पड़ आठ निशान से एक के साथ ऊतक के शीर्ष पर नमूना रखें।
- मापन सेटिंग्स।
- प्रसंस्करण के प्रकार के रूप में VSI (कार्यक्षेत्र-स्कैन इंटरफेरोमेट्री) चुनें। के लिए 5X लेंस का चयन करेंदेखें और समग्र आकार के बड़े क्षेत्र। 2.4 मिमी से 1.8 मिमी की एक स्कैन क्षेत्र के लिए 0.55x बढ़ाई उठाओ।
- 1X स्कैन गति चुनें। -100 मीटर से 100 मीटर करने के लिए स्कैन सीमा निर्धारित करें। स्क्रीन पर एक धुंधली छवि नहीं है जब तक नमूना ओर नीचे लेंस लाओ। छवि साफ है जब तक लेंस की ऊंचाई को समायोजित करें।
- स्कैन की संख्या प्रत्येक माप के लिए औसत के रूप में 2 चुनें। माप बटन पर क्लिक करें।
- पोस्ट-माप प्रक्रियाओं।
- पूरे नमूना के झुकाव के लिए कच्चे छवि को दूर करने के लिए सॉफ्टवेयर में परिभाषित किया है कि दृष्टि नुस्खा का प्रयोग करें। सॉफ्टवेयर में विश्लेषण उपकरण बॉक्स खोलें।
- "मूल आँकड़े" मद से मापा खुरदरापन मूल्यों को प्राप्त। "वॉल्यूम" मद से स्कैन क्षेत्र के भीतर पहनने के निशान से मापा मात्रा घटाने प्राप्त करते हैं।
- एक्स और वाई दिशाओं में 1 डी प्रोफाइल की छवियों को बचाने के लिए, 2 डी प्रोफ़ाइल, 3 डी प्रोफ़ाइल, साथ ही खुरदरापन मूल्यों की मेज। वीं तक नमूना दक्षिणावर्त बारीई अगले निशान profilometer के सामने चेहरे।
- दोहराएँ 4.2 शेष 7 के निशान के लिए 4.3 कदम।
- दोहराएँ 4.1 कदम। सभी छह डिस्क पर 4.4।
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
यहाँ प्रस्तुत प्रतिनिधि माप चित्र 1 में दिखाया संशोधित tribometer से प्राप्त किया गया। पीजोइलेक्ट्रिक क्रियाकारक 22 किलोहर्ट्ज़ की एक आवृत्ति पर 2.5 माइक्रोन के आयाम के साथ कंपन उत्पन्न करता है। घर्षण की निर्भरता का अध्ययन करने और रेखीय वेग पर कमी पहनने के लिए, तीन अलग अलग गति (20.3, 40.6, और 87 मिमी / सेकंड) मोटर की घूर्णन गति बदलकर डिस्क के लिए लागू किया गया। सभी तीन समूहों के लिए, डिस्क क्रांतियों की संख्या और पिन की यात्रा की दूरी क्रमश: 1,600 और 292.5 मीटर है, के रूप में चुने गए हैं। नाममात्र रोटेशन व्यास 50 मिमी था। इस तरह के सामान्य बल, कंपन आवृत्ति, और कंपन आयाम के रूप में अन्य मापदंडों सभी परीक्षण (तालिका 1) के लिए ही बने रहे।
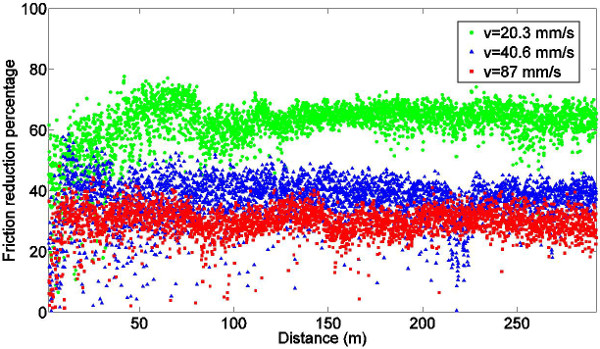
घर्षण बल 2 सेकंड नमूना खिड़कियों का उपयोग 400 हर्ट्ज की एक आवृत्ति पर नमूना था। 2 एक भी नमूना खिड़की से ठेठ डेटा से पता चलता है। मनाया fluctuatioघर्षण बल में n छड़ी पर्ची करने के लिए जिम्मेदार ठहराया है। घर्षण बल का मतलब मूल्यों की गणना की और चित्रा 3 में पिन यात्रा की दूरी के खिलाफ साजिश रची थे। अल्ट्रासोनिक कंपन के साथ घर्षण बलों "एक्स" मार्कर के साथ दिखाया जाता है, जबकि आंतरिक घर्षण बलों, आकृति में डॉट्स द्वारा प्रतिनिधित्व कर रहे हैं। हरे, नीले और लाल 20.3 मिमी / सेकंड, 40.6 मिमी / सेकंड, और 87 मिमी / सेकंड में परीक्षण के आंकड़ों के लिए क्रमश: उपयोग किया जाता है। प्रत्येक परीक्षा से घर्षण बल स्थिर राज्य आपरेशन हासिल की है एक बार लगभग स्थिर बनी हुई है।
डिस्क ठहरना सामान्य बल की विभिन्नता में जो परिणाम पिन और gymbal विधानसभा की ऊर्ध्वाधर गति से जड़त्वीय त्वरण का कारण बनता है। 3 चित्र में दिखाया गया है एक परिणाम के रूप में, मापा घर्षण बल उतार चढ़ाव होता रहता। यह चित्रा 2 में मनाया अस्थिरता छड़ी पर्ची की वजह से है कि बल दिया है। प्रणाली के बाद घर्षण बल का मतलब मूल्य को ध्यान में रखते लगातार राज्य संचालन, चित्रा तक पहुँच गया है3 घर्षण बल अल्ट्रासोनिक कंपन प्रणाली को लागू कर रहे हैं या नहीं, उच्च रैखिक गति पर अधिक है कि पता चलता है। इस परिणाम के बल गति वक्र कम रेखीय गति 19-21 के लिए एक सकारात्मक ढलान दिखा रहा है कि पिछले अध्ययनों के अनुरूप है।
घर्षण कम प्रतिशत के रूप में परिभाषित किया गया है
1। 
जहां (अल्ट्रासोनिक कंपन के बिना बल, 3.2 चरण में मापा) आंतरिक घर्षण बल है और (कदम 3.1.4 में मापा) अल्ट्रासोनिक कंपन के साथ घर्षण बल है। प्रत्येक रेखीय गति में कमी प्रतिशत चित्रा 4 में पिन से कूच दूरी के खिलाफ साजिश रची है। अल्ट्रासोनिक कंपन परीक्षण सभी तीन रेखीय गति के लिए स्थिर राज्य घर्षण बल को कम करने, तथापि, प्रतिशत रेखीय वेग बढ़ जाती है के रूप में कम हो जाती है।
मापा स्थिर राज्य घर्षणबलों, स्थिरीकरण दूरी, और घर्षण कमी प्रतिशत 2 टेबल में सूचीबद्ध हैं। अल्ट्रासोनिक कंपन ऑक्साइड परत टूट और स्थिर तक पहुंचने के लिए घर्षण बल के लिए एक कम दूरी की ओर जाता है जो पिन और डिस्क के बीच स्थिर संपर्कों के गठन की प्रक्रिया की सुविधा राज्य अल्ट्रासोनिक कंपन मौजूद हैं।
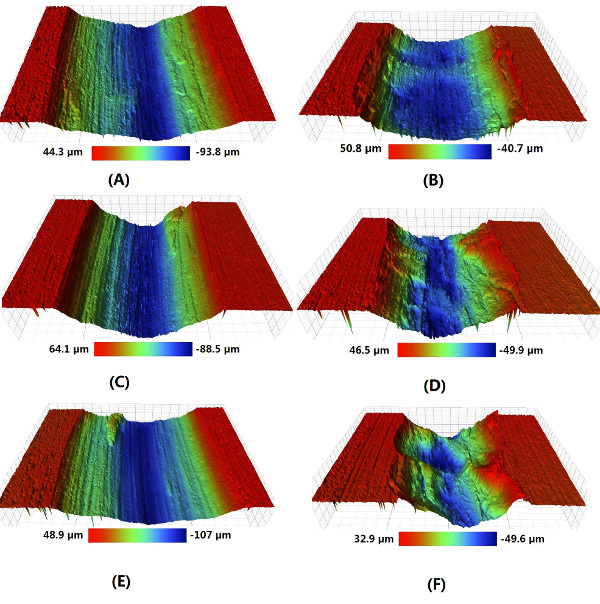
घर्षण पहनते अलग hardnesses के साथ सामग्री की सतह पर बीच होता है। 22 कारण स्टेनलेस स्टील की कठोरता में अंतर करने के लिए (700-950 किलो / 2 मिमी) और एल्यूमीनियम (45 से 50 किलो / 2 मिमी), पहनने के घर्षण के रूप में पहचाना जाता है इस अध्ययन में। डिस्क पर पहनें खांचे छवियों बी, डी, एफ कंपन के बिना डेटा कर रहे हैं, जबकि 5. छवियाँ ए, सी, ई, अल्ट्रासोनिक कंपन के साथ परीक्षण के अनुरूप चित्र में दिखाए जाते हैं। यह खांचे अधिक असमान और अल्ट्रासोनिक कंपन लागू कर रहे हैं, जब गैर चिंतनशील दिखाई देते हैं कि देखा जा सकता है।
तीन आयामी पीrofiles, सतह खुरदरापन मूल्यों, और खांचे की मात्रा घाटा profilometer स्कैन से प्राप्त कर रहे हैं। अल्ट्रासोनिक कंपन के साथ खांचे के 3-डी प्रोफाइल (चित्रा 6 बी, डी, एफ) अल्ट्रासोनिक कंपन पहनने कमी का कारण पता चलता है कि, जो कंपन (चित्रा 6 ए, सी, ई) के बिना, संकरा कम चिकनी, और लोगों की तुलना में उथले दिखाई ।
दर के रूप में परिभाषित किया गया है पहनते हैं, पहनने कमी की मात्रा को जानने
2। 
जहां मिमी 3 में डिस्क मात्रा घटाने (कदम 4.3.2 में मापा जाता है) है और मीटर (1 टेबल) में पिन से यात्रा की दूरी है। घर्षण कम प्रतिशत के लिए इसी प्रकार, पहनने कमी प्रतिशत के रूप में परिभाषित किया गया है
3। 
जहां (अल्ट्रासोनिक कंपन के बिना) आंतरिक पहनने दर है और साथ पहनने दर हैअल्ट्रासोनिक कंपन लागू होता है। दरों में और सतह खुरदरापन मानकों को पहनना है कि तालिका में डेटा 3 से पता चलता अल्ट्रासोनिक कंपन पहनने कमी का सूचक है, जो मौजूद हैं जब छोटे होते हैं। पहनने कमी प्रतिशत वेग बढ़ जाती है के रूप में लगभग निरंतर बनी हुई है।





"हमेशा" =>-पृष्ठ के भीतर 
चित्रा 1. प्रायोगिक सेट-अप: (ए) कुल मिलाकर tribometer, (बी) मोटर, (सी) का समर्थन फ्रेम, (घ) विस्तृत gymbal विधानसभा, (ई) पीजोइलेक्ट्रिक क्रियाकारक; और (एफ) प्रणाली योजनाबद्ध। (यह आंकड़ा 13 से संशोधित किया गया है।)

एक नमूना खिड़की से 2. विशिष्ट डेटा चित्रा। (यह आंकड़ा 13 से संशोधित किया गया है।) यह आंकड़ा का एक बड़ा संस्करण देखने के लिए यहां क्लिक करें।
931fig3.jpg "/>
साथ और विभिन्न गति पर अल्ट्रासोनिक कंपन के बिना चित्रा 3. घर्षण बलों। (यह आंकड़ा 13 से संशोधित किया गया है) यह आंकड़ा का एक बड़ा संस्करण देखने के लिए यहां क्लिक करें।

Eq से गणना की चित्रा 4. मापा घर्षण कमी। (1)। (यह आंकड़ा 13 से संशोधित किया गया है) कृपया यहाँ क्लिक करें यह आंकड़ा का एक बड़ा संस्करण देखने के लिए।

चित्रा 5. पहनें खांचे अल्ट्रासोनिक देने वाला के साथ प्राप्त। ations (ए, सी और ई) और अल्ट्रासोनिक कंपन के बिना (बी, डी, और एफ) प्रत्येक स्तंभ एक रेखीय गति से मेल खाती है: 20.3 मिमी / सेकंड (ए, बी); 40.6 मिमी / सेकंड (सी, डी); और 87 मिमी / सेकंड (ई, एफ)। (यह आंकड़ा 13 से संशोधित किया गया है)

। अल्ट्रासोनिक कंपन (ए, सी और ई) के बिना प्राप्त पहनने खांचे की और अल्ट्रासोनिक कंपन (बी, डी, और एफ) प्रत्येक पंक्ति एक रेखीय गति का प्रतिनिधित्व करता है के साथ चित्रा 6. 3 डी प्रोफाइल: 20.3 मिमी / सेकंड (ए, बी); 40.6 मिमी / सेकंड (सी, डी); और 87 मिमी / सेकंड (ई, एफ)। (यह आंकड़ा 13 से संशोधित किया गया है) कृपया यहाँ क्लिक करें यह आंकड़ा का एक बड़ा संस्करण देखने के लिए।
| पैरामीटर | मूल्य | ||
| समूह | 1 | 2 | 3 |
| रेखीय गति (मिमी / सेकंड) | 20.3 | 40.6 | 87 |
| समय चल रहा है (मानव संसाधन) | 4 | 2 | 0.93 |
| पिन से कूच दूरी (एम) | 292.5 | ||
| क्रांतियों | 1600 | ||
| पिन सामग्री | स्टेनलेस स्टील 316 | ||
| डिस्क सामग्री | एल्यूमिनियम 2024 | ||
| नाममात्र सामान्य बल (एन) | 3 | ||
| डिस्क बाहर चला (मिमी) | 0.0286 | ||
| अमेरिका आवृत्ति (KHz) | 22 | ||
| अमेरिका आयाम (माइक्रोन) | 2.5 | ||
| नाममात्र नाली व्यास (मिमी) 50 | |||
| नाममात्र तापमान (डिग्री सेल्सियस) | 21 ± 1 | ||
| नाममात्र क्रियाकारक तापमान (डिग्री सेल्सियस) | 31 ± 1 | ||
| वातावरण | प्रयोगशाला हवा | ||
| नमूने आवृत्ति (हर्ट्ज) | 400 | ||
Tribometer परीक्षण में उपयोग तालिका 1. पैरामीटर। (इस तालिका में 13 से संशोधित किया गया है)
| रेखीय गति (मिमी / सेकंड) | अमेरिका | संभल राज्य घर्षण (एन) | दूरी स्थिर राज्य (एम) को प्राप्त करने के लिए | घर्षण कमी (%) |
| 20.3 | नहीं | 1.024 ± 0.063 | 4.17 | 62.22 |
| हाँ | 0.379 ±0.041 | 2.78 | ||
| 40.6 | नहीं | 1.201 ± 0.055 | 11.61 | 36.11 |
| हाँ | 0.748 ± 0.035 | 7.21 | ||
| 87 | नहीं | 1.472 ± 0.064 | 8.94 | 29.32 |
| हाँ | 1.041 ± 0.056 | 4.64 |
तालिका 2 संभल राज्य घर्षण बलों, राज्य स्थिर, और घर्षण कमी को प्राप्त करने के लिए दूरी। (इस तालिका में 13 से संशोधित किया गया है)
| रेखीय गति (मिमी / सेकंड) | अमेरिका | आर ए (माइक्रोन) | आर क्यू (माइक्रोन) | आर टी (माइक्रोन) | दर पहनने (मिमी 3 / मी) | संपर्कों की संख्या | |
| 20.3 | नहीं | 18.829 | 21.421 | 124.35 | 2.237 × 10 -2 | 45.76 | |
| हाँ | 17.238 | 18.975 | 87.011 | 1.214 × 10 -2 | 3.17 × 10 8 | ||
| 40.6 | नहीं | 21.647 | 22.673 | 109.28 | 2.581 × 10 -2 | 48.18 | |
| हाँ | 17.289 | 19.922 | 106.42 | 1.338 × 10 -2 | 1.58 × 10 8 | ||
| 87 | नहीं | 19.825 | 21.921 | 130.52 | 2.43 × 10 -2 | 48.63 | |
| हाँ | 17.606 | 111.25 | 1.248 × 10 -2 | 7.39 × 10 8 |
पहनने दर, संपर्कों की संख्या, और सतह खुरदरापन मापदंडों की तालिका 3. तुलना (गणित औसत; जड़ चुकता मतलब है, प्रोफ़ाइल की अधिकतम ऊंचाई) (इस तालिका में 13 से संशोधित किया गया है)।
Subscription Required. Please recommend JoVE to your librarian.
Discussion
प्रयोगों अल्ट्रासोनिक घर्षण और पहनने में कमी पर रेखीय गति के प्रभाव का अध्ययन करने के लिए इस प्रोटोकॉल का उपयोग किया गया। माप अल्ट्रासोनिक कंपन को प्रभावी ढंग से घर्षण को कम करने और तीन रेखीय गति पर पहनने कि दिखा। पूर्व टिप्पणियों के अनुरूप, घर्षण कमी की राशि 87 मिमी / सेकंड में 29.3% से 20.3 मिमी / सेकंड में 62.2% से कम हो जाती है। पहनें कमी रेखीय गति (48.6% से 45.8%) बदलने के साथ नगण्य है।
अल्ट्रासोनिक तरंगों सामग्री के माध्यम से प्रेषित कर रहे हैं जब इस तरह के यंग मापांक और उपज ताकत के रूप में सामग्री गुण बदल सकते हैं। इस बार के रूप में अल्ट्रासोनिक नरमी 23 में जाना जाता है। इस अध्ययन में, पीजो actuator और सेट-अप के अन्य भागों के बीच कठोरता अंतर के कारण, प्रवर्तक द्वारा बनाई गई 22 किलोहर्ट्ज़ कंपन, प्रयोगात्मक सेट अप के अन्य भाग को हस्तांतरित नहीं किया था की एक कंपन मोड हालांकि करीब 100 हर्ट्ज पर संरचना उत्साहित थी जब अल्ट्रासोनिक VIBराशन लागू किया गया। पिन और डिस्क के बीच इंटरफेस में, अल्ट्रासोनिक कंपन इंटरफेस में तापमान वृद्धि के कारण होगा जो गर्मी पीढ़ी का कारण। हालांकि, दांग और Dapino द्वारा किए गए प्रयोगों के आधार पर तापमान वृद्धि के गुण सामग्री को नगण्य परिवर्तन का कारण बनता है कि एक रेंज में है।
इस प्रयोग की एक सीमा है पिन की ऊर्ध्वाधर गति, gymbal हाथ, और वजन का कारण बन सकता है, जो डिस्क लड़खड़ा, समाप्त करने के लिए कोई व्यवस्था नहीं है कि है। वास्तविक सामान्य बल के रूपांतरों में चलती जन परिणामों के त्वरण इसलिए घर्षण बलों मापा जाता है, इंटरफेस में लागू होता है। इसलिए, यह मोटर शाफ्ट, splined शाफ्ट, चक, और डिस्क स्तर हैं कि यह सुनिश्चित करने के लिए महत्वपूर्ण है। लड़खड़ा की राशि कम से कम है जब प्रयोगात्मक परिवर्तनशीलता को कम किया जा सकता है।
बलूत का फल अखरोट परीक्षण के दौरान ढीला नहीं हो जाता है, तो यह भी मजबूती से पीजोइलेक्ट्रिक actuator के लिए बलूत का फल अखरोट कस के लिए महत्वपूर्ण है। अत्यंतकंपन इंटरफेस को प्रेषित नहीं कर रहे हैं, तो ध्वनि कंपन घर्षण बल को कम करने के लिए अप्रभावी कर रहे हैं। घर्षण बल अचानक परीक्षण के दौरान एक उच्च स्तर के लिए कूदता है, तो इसकी वजह यह बलूत का फल अखरोट और actuator के बीच एक ढीला कनेक्शन की बहुत संभावना है। यह आसानी से पता लगाया जा सकता है तो यह समस्या एक गूंज शोर के साथ है।
एक विद्युत चालित पीजो क्रियाकारक कोई ठंडा कार्यरत है, तो तेजी से अपनी तापमान में वृद्धि कर सकते हैं कि गर्मी उत्पन्न करता है। यह गर्मी को दूर और actuator निरंतर का तापमान बनाए रखने के लिए एक उचित स्तर के लिए हवा का प्रवाह समायोजित करने के लिए आवश्यक है। पीजो क्रियाकारक अल्ट्रासोनिक कंपन के बिना परीक्षण के लिए बंद कर दिया जाता है कि जब भी परीक्षण की स्थिति सभी परीक्षणों के लिए ही रहते हैं, ताकि एक ही हवा का प्रवाह अब भी लागू किया जाना चाहिए।
पहले काम की तुलना में, इस प्रोटोकॉल के अध्ययन के घर्षण और व्यवस्थित पहले से नहीं किया गया था, जो एक ही परीक्षा में, एक साथ पहनते हैं। gymbalविधानसभा एक मापा प्रवर्तन बल से या ऐसी विकृति या टोक़ के रूप में अन्य शारीरिक मापदंडों से घर्षण निकाले जाते हैं, जो या तो अन्य तरीकों से इंटरफेस में घर्षण बलों को मापने के लिए एक और अधिक प्रत्यक्ष दृष्टिकोण में सक्षम बनाता है। इन परीक्षणों के लिए डिजाइन और निर्मित डिस्क धारक विभिन्न आयामों, सामग्री, और सतह roughnesses के साथ परीक्षण के नमूने की सुविधाजनक परिवर्तन की अनुमति देता है। ऑप्टिकल profilometer ऐसी मात्रा घटाने या वजन घटाने माप की तुलना में पहनने के निशान से अधिक विस्तृत समझ प्रदान करता है जो पहनने में कमी, अध्ययन करने के लिए 3 डी प्रोफाइल और सतह खुरदरापन के रूप में जानकारी प्रदान करता है। इन फायदों के साथ, इस प्रोटोकॉल अल्ट्रासोनिक घर्षण की निर्भरता की जांच और इस तरह के सामान्य तनाव, सामग्री कठोरता, सतह खुरदरापन, और कंपन आयाम के रूप में कई अन्य मानकों पर कमी पहनने के लिए उपयोग किया जा सकता है।
Subscription Required. Please recommend JoVE to your librarian.
Acknowledgments
लेखकों योगदान उनकी तकनीकी सहायता के लिए और खास तरह का होंडा आर एंड डी से नासा ग्लेन और Duane Detwiler से टिम Krantz स्वीकार करना चाहते हैं। इस शोध के लिए वित्तीय सहायता स्मार्ट वाहन अवधारणाओं केंद्र (www.SmartVehicleCenter.org) के सदस्य संगठनों द्वारा प्रदान किया गया था, एक राष्ट्रीय विज्ञान फाउंडेशन उद्योग / विश्वविद्यालय सहकारी अनुसंधान केंद्र (मैं / UCRC)। एसडी एक स्मार्ट वाहन अवधारणाओं ग्रेजुएट फैलोशिप और ओहियो राज्य विश्वविद्यालय के ग्रेजुएट स्कूल से एक विश्वविद्यालय फैलोशिप द्वारा समर्थित है।
Materials
| Name | Company | Catalog Number | Comments |
| DC Motor | Minarik | SL14 | |
| Electrical amplifier | AE Techron | LVC5050 | |
| Signal conditioner | Vishay Measurements Group | 2310 | |
| Signal generator | Agilent | 33120A | |
| Piezoelectric stack | EDO corporation | EP200-62 | |
| Load cell | Transducer Techniques | MLP-50 | |
| Load sensor pad | FlexiForce | A201 | |
| Laser meter | Keyence corporation | LK-G32 | |
| Hall-effect probe and gaussmeter | Walker Scientific, Inc. | MG-4D | |
| Data acquisition module | Data Physics | Quattro | |
| Data acquisition software | Data Physics | SignalCalc Ace | |
| Thermocouple reader | Omega | HH22 | |
| Optical profilometer | Bruker | Contour GT | |
| Profilometer operation software | Bruker | Vision 64 |
References
- Bhushan, B. Introduction to tribology. , John Wiley & Sons. New York. (2002).
- Severdenko, V., Klubovich, V., Stepanenko, A. Ultrasonic rolling and drawing of metals. , Consultants Bureau. New York and London. (1972).
- Taylor, R., Coy, R. Improved fuel efficiency by lubricant design: a review. Proc. Instit. Mech. Eng., Part J: J Eng. Tribol. 214 (1), 1-15 (2000).
- Littmann, W., Storck, H., Wallaschek, J. Sliding friction in the presence of ultrasonic oscillations: superposition of longitudinal oscillations. Arch. Appl. Mech. 71 (8), 549-554 (2001).
- Littmann, W., Storck, H., Wallaschek, J. Reduction in friction using piezoelectrically excited ultrasonic vibrations. Proc. SPIE. 4331, (2001).
- Bharadwaj, S., Dapino, M. J. Friction control in automotive seat belt systems by piezoelectrically generated ultrasonic vibrations. Proc. SPIE. 7645, 7645E (2010).
- Bharadwaj, S., Dapino, M. J. Effect of load on active friction control using ultrasonic vibrations. Proc. SPIE. 7290, 7290G (2010).
- Kumar, V., Hutchings, I. Reduction of the sliding friction of metals by the application of longitudinal or transverse ultrasonic vibration. Tribol. Int. 37 (10), 833-840 (2004).
- Pohlman, R., Lehfeldt, E. Influence of ultrasonic vibration on metallic friction. Ultrasonics. 4 (4), 178-185 (1966).
- Popov, V., Starcevic, J., Filippov, A. Influence of Ultrasonic In-Plane Oscillations on Static and Sliding Friction and Intrinsic Length Scale of Dry Friction Processes. Tribol. Lett. 39 (1), 25-30 (2010).
- Dong, S., Dapino, M. J. Piezoelectrically-induced ultrasonic lubrication by way of Poisson effect. Proc. SPIE. 8343, 83430L (2012).
- Dong, S., Dapino, M. J. Elastic-plastic cube model for ultrasonic friction reduction via Poisson effect. Ultrasonics. 54 (1), 343-350 (2014).
- Dong, S., Dapino, M. J. Wear Reduction Through Piezoelectrically-Assisted Ultrasonic Lubrication. Smart. Mater. Struct. 23 (10), 104005 (2014).
- Chowdhury, M., Helali, M. The effect of frequency of vibration and humidity on the wear rate. Wear. 262 (1-2), 198-203 (2014).
- Bryant, M., Tewari, A., York, D. Effect of Micro (rocking) vibrations and surface waviness on wear and wear debris. Wear. 216 (1), 60-69 (1998).
- Bryant, M., York, D. Measurements and correlations of slider vibrations and wear. J. Tribol. 122 (1), 374-380 (2000).
- Goto, H., Ashida, M., Terauchi, Y. Effect of ultrasonic vibration on the wear characteristics of a carbon steel: analysis of the wear mechanism. Wear. 94, 13-27 (1984).
- Goto, H., Ashida, M., Terauchi, Y. Wear behaviour of a carbon steel subjected to an ultrasonic vibration effect superimposed on a static contact load. Wear. 110 (2), 169-181 (1986).
- Robinowicz, E. The friction and wear of materials. , Wiley. New Jersey. (1965).
- Bowden, F., Freitag, E. The friction of solids at very high speeds. Proc. R. Soc. A. 248 (1254), 350-367 (1985).
- Burwell, J., Rabinowicz, E.
- Cocks, M.
- Rusinko, A. Ultrasound and Irrecoverable Deformation in Metals. , LAP Lambert Academic Publishing. Saarbrücken. (2012).

{kind=link}
{kind=link}