Two experiments are presented here. For both experiments, the data used were randomly sampled from a dataset that contains over 100,000 objects.
The first experiment shows the ability of the proposed classifier to accurately classify different species/sexes of insects. As the classification accuracy depends on the insects to be classified, a single absolute value for classification accuracy will not give the reader a good intuition about the performance of the system. Instead, rather than reporting the classifier’s accuracy on a fixed set of insects, the classifier was applied to datasets with an incrementally increasing number of species, and therefore increasing classification difficulty.
The dataset began with just 2 species of insects; then at each step, one more species (or a single sex of a sexually dimorphic species) was added and the classifier was used to classify the increased number of species (the new dataset). A total of ten classes of insects (different sexes from the same species counting as different classes) were considered, with 5,000 exemplars in each class.
The classifier used both insect-sound (frequency spectrum) and time-of-intercept for classification. Table 1 shows the classification accuracy measured at each step and the relevant class added at that step.
According to Table 1, the classifier achieves more than 96% accuracy when classifying no more than 5 species of insects, significantly higher than the default rate of 20% accuracy. Even when the number of classes considered increases to 10, the classification accuracy is never lower than 79%, again significantly higher than the default rate of 10%. Note that the ten classes are not easy to separate, even by human inspection. Among the ten species, eight of them are mosquitoes, with six of them being from the same genus.
The second experiment is to show how accurately the system can sex flying insects, specifically, to distinguish male Ae. aegypti mosquitoes from females. For the first part of the experiment, assume that the “misclassification cost” of misclassifying males as females is the same as the cost of misclassifying females as males. With this assumption, the classification results are shown in Table 2.I. The classification accuracy to sex Ae. aegypti is about 99.4%.
For the second part of experiment, assume the cost is not asymmetric, i.e., misclassification of females as males is much more costly than the reverse. With this assumption, the decision threshold of the classifier was changed to reduce the number of high-cost misclassifications. With the threshold properly adjusted, the classification results in Table 2.II were achieved. Of 2,000 insects in the experiment, twenty-two males, and zero females were misclassified.
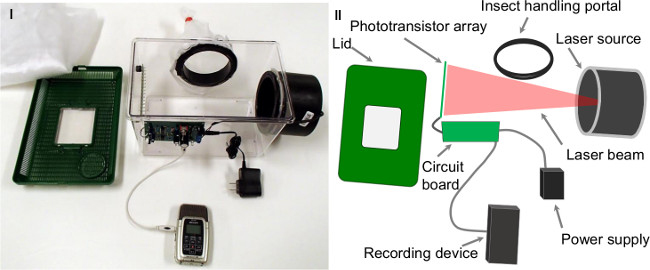
Figure 1. (I) One of the experimental cages used to gather the data. (II) A logical version of the sensor setup with the components annotated. Please click here to view a larger version of this figure.
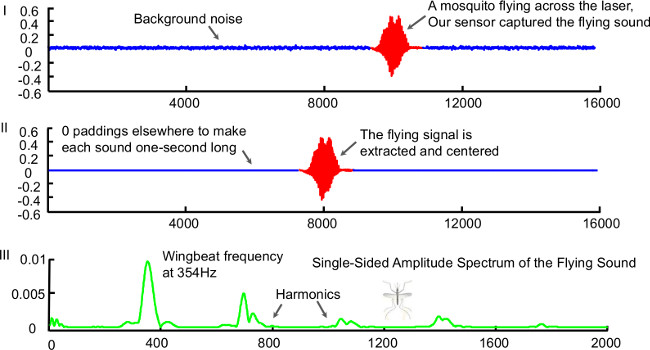
Figure 2. (I) An example of a 1 sec audio clip containing a “flying insect sound” generated by the sensor. The sound was produced by a female Cx. stigmatosoma. The insect sound is highlighted in red/bold. (II) The “insect sound”, which has been cleaned and saved into a 1-sec long audio clip by centering the insect signal and padding with 0s elsewhere. (III) The frequency spectrum of the insect sound, obtained using Discrete Fourier Transform. Please click here to view a larger version of this figure.

Figure 3. A Bayesian network that uses a single feature for classification.

Figure 4. A Bayesian network that uses two independent features for classification

Figure 5. The circadian rhythms of Cx. stigmatosoma (female), Cx. tarsalis (male), and Ae. aegypti (female), learned based on observations generated by the sensor that were collected over 1 month duration. Please click here to view a larger version of this figure.

Figure 6. A Bayesian network that uses three independent features for classification.
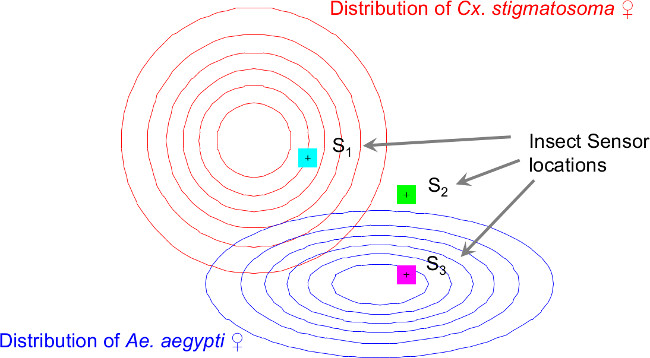
Figure 7. The assumptions of the geographic distributions of each insect species and sensor locations in the simulation to demonstrate the effectiveness of using location-of-intercept feature in classification. Please click here to view a larger version of this figure.
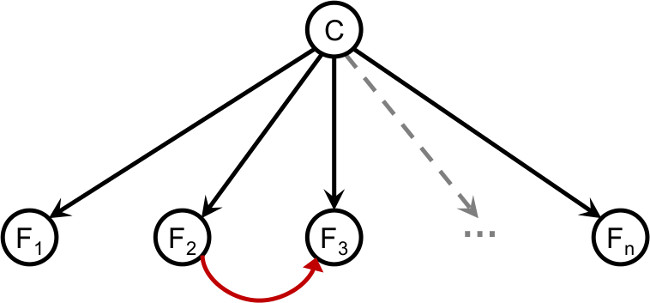
Figure 8. The general Bayesian network that uses n features for classification, where n is a positive integer. Please click here to view a larger version of this figure.
| Step | Species Added | Classification Accuracy | Step | Species Added | Classification Accuracy | |
| 1 | Ae. aegypti ♂ | N/A | 6 | Cx. quinquefasciatus ♂ | 92.69% | |
| 2 | Musca domestica | 98.99% | 7 | Cx. stigmatosoma ♀ | 89.66% | |
| 3 | Ae. aegypti ♀ | 98.27% | 8 | Cx. tarsalis ♂ | 83.54% | |
| 4 | Cx. stigmatosoma ♂ | 97.31% | 9 | Cx. quinquefasciatus ♀ | 81.04% | |
| 5 | Cx. tarsalis ♀ | 96.10% | 10 | Drosophila simulans | 79.44% |
Table 1. Classification accuracy with increasing number of classes.
| Predicted class | Predicted class | |||||||
| I (Symmetric cost) | female | male | II (Asymmetric cost) | female | male | |||
| Actual class | female | 993 | 7 | Actual class | female | 1,000 | 0 | |
| male | 5 | 995 | male | 22 | 978 | |||
Table 2. (I) The confusion matrix for sex discrimination of Ae. aegypti mosquitoes with the decision threshold for females is set at 0.5 (i.e., same cost assumption). (II) The confusion matrix of sex the same mosquitoes, with the decision threshold for females set at 0.1.
