

Introduction
Con l'aumento dell'obesità globale durante l'ultima parte del 20 ° secolo, c'è un rinnovato attenzione sui meccanismi alla base di alimentazione 1, 2, 3, 4. Tipicamente, l'assunzione di cibo viene pesato manualmente 5, o con sistemi di alimentazione disponibili in commercio. sistemi commerciali sono eccellenti, ma forniscono la flessibilità limitata nel modificare i loro disegni o codice. Qui, descriviamo il dispositivo di alimentazione Sperimentazione (FED): un sistema di alimentazione open-source per la misura l'assunzione di cibo con fine risoluzione temporale e il minimo intervento umano 6. FED è alimentato a batteria e completamente contenuto all'interno di una custodia in 3D stampata che può andare bene all'interno di standard di ingabbiamento cremagliera colonia o di altre apparecchiature scientifiche.
Nel suo stato stazionario, FED opera in modalità a basso consumo con un alimento a pellet di riposo nella sua food bene. La presenza del pellet viene monitorato tramite un raggio a infrarossi. Quando un mouse rimuove una pastiglia, un sensore Photointerrupter invia un segnale al microcontrollore e il time-stamp è connesso al (SD) card bordo sicuro digitale. Contemporaneamente, una uscita logica transistor-transistor (TTL) fornisce un'uscita in tempo reale di recupero pellet. Immediatamente dopo questo evento, il motore ruota ad erogare un'altra pellet, e il sistema ritorna alla sua modalità basso consumo. Grazie alla sua natura open-source, FED può essere modificato e migliorato per soddisfare le esigenze specifiche di ricerca. Ad esempio, il codice può essere facilmente modificato per limitare somministrazione ai momenti specifici della giornata, o per interrompere l'erogazione quando è stato raggiunto un numero di pellets, senza richiedere interferenza umana.
Qui, si delineano le istruzioni passo-passo per la costruzione, la convalida e l'uso di FED per misurare l'assunzione di cibo nei topi. Forniamo un elenco di tutti i componenti per la costruzione di un sistema. È importante sottolineare che nessun ex primarienza in elettronica è necessaria per costruire FED.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
NOTA: Questo protocollo è stato scritto per i componenti specificamente indicati nella tabella dei materiali. Mentre una funzionalità simile può essere realizzato utilizzando altro hardware, FED è stato programmato per il microcontrollore Arduino Pro (d'ora in poi chiamato: microcontrollore) e accessori elencati. Altri microcontrollori possono funzionare altrettanto bene, ma richiederà all'utente di modificare il codice di sostenerli. l'analisi dei dati in linea è stato codificato utilizzando il linguaggio di programmazione Python.
1. Preparazione e installazione del software
- Procurarsi i componenti elettronici necessari per costruire FED (vedi Tabella 1 andFed Github BoM.xlxs a: https://github.com/KravitzLab/FED/tree/master/doc).
NOTA: i fornitori alternativi possono essere usati per molte parti su questo tavolo, a condizione che abbiano specifiche equivalenti. - Stampa tutti i componenti 3D progettati (figura 1, disponibili presso: https://github.com/KravitzLab/FED/wiki/3D-Printed-Components). stampanti 3D con 200 micronrisoluzione dovrebbe essere in grado di stampare FED.
- Scaricare e installare la piattaforma Integrated Development Environment (IDE) per programmare il microcontrollore.
- Scaricare e installare librerie aggiuntive per attivare la funzionalità di scudo motore e data logger (disponibile all'indirizzo: https://github.com/KravitzLab/fed/tree/master/fed-arduino).
- Procurarsi gli strumenti necessari per il montaggio (ad esempio, un saldatore, pistola termica, saldatura, spellafili, pinze a naso, ed entrambi a testa piatta e cacciaviti).
2. Componenti elettrici di saldatura
NOTA: utilizzare il calore tubo termoretraibile per proteggere tutti i giunti saldati. Prima di connessioni di saldatura, far scorrere un pezzo di tubo termoretraibile (circa 2 cm) tubi attorno ad uno dei fili. Dopo aver saldato il collegamento, centrare il tubo sul punto di connessione e utilizzare una pistola di calore per riscaldare restringere il tubo.
- Connettori Preparazione (Figura 2A)
- Preparare quattro coppie di connettori JST 2 pin eetichettare sia maschili che femminili lati "A", "B", "C" e "D", rispettivamente. Rimuovere il filo rosso da entrambi i lati della coppia di connettori "D".
- Preparare una coppia di connettori JST a 3 pin ed etichettare entrambe le parti maschili e femminili "E".
- Microcontrollori e impilabili scudi (Figura 2B)
- Saldare intestazioni impilabili femminili con prese sul lato superiore del microcontrollore. Clip sporgenti filo dal intestazioni sul fondo del microcontrollore.
- Saldare femminile intestazioni impilabili con prese sul lato superiore dello scudo registrazione dei dati SD. Lasciare sporgenti cavi nella parte inferiore dello scudo.
- Saldare connettori maschio sullo scudo motore con perni sporgenti dal fondo.
- Inserire una batteria a bottone nello slot di scudo SD per fornire alimentazione al modulo orologio in tempo reale.
- Pulsante di accensione esterno (Figura 2C)
NOTA: Un aggancio in metallo pulsante ettaris cinque connessioni: potenza, a terra, normalmente chiuso (NC1), normalmente aperto (NO1) e comune (C1).- Saldare il connettore a 2 pin maschile "A" per C1 (filo rosso uso) e la terra (usare filo nero). Termoretraibile tutte le connessioni.
- Saldare il 2-pin connettore maschio "B" a + (filo rosso uso) e NO1 (usare filo nero). Termoretraibile tutte le connessioni.
- Fotointerruttori (Figura 2D)
- Saldare Fotointerruttori (la parte nera) a bordo di sblocco.
- Saldare una resistenza 4.7K verso la parte anteriore della scheda di breakout.
- Saldare il maschio a 3 pin connettore "E" per il posteriore della scheda di breakout: filo rosso al PWR, filo verde a GND, e il filo bianco al SGL.
- Tagliare i fili sciolti sul retro della Photointerrupter uscire bordo.
- Bordo Boost (Figura 2E)
- Saldare il 2-pin connettore femmina "A" a 5V e terra pin sulla scheda di spinta.
- Saldare il filo nero da MAConnettore le "D" al pin aggiuntivi GND sulla scheda boost.
- Cavo di uscita BNC (opzionale: Figura 2F)
- Saldare il 2-pin connettore "C" per i terminali di un cavo BNC (filo rosso al perno centrale, filo nero al pin esterno).
NOTA: Per il montaggio, il connettore a 2 pin deve passare attraverso il dado sul connettore BNC. Usiamo un connettore più piccolo, o la barba verso il basso il connettore JST con una lama di rasoio per adattarlo.
- Saldare il 2-pin connettore "C" per i terminali di un cavo BNC (filo rosso al perno centrale, filo nero al pin esterno).
- Motor Shield (Figura 2G)
- Intrecciare i fili rosso e nero del connettore femmina "B" insieme e saldare a V a.
- Saldare il filo nero del connettore femmina "C" al pin terra accanto al Aref, e il filo rosso di questo connettore al piedino 3.
- Saldare il filo nero del connettore femmina "D" al pin terra accanto al V a.
- Saldare il filo verde del connettore femmina "E" al pin terraaccanto a 5V, il filo rosso di questo connettore a 5 V, e il filo bianco di questo connettore a pin 2.
3. Software Upload
- Collegare il breakout board FTDI ai pin di programmazione del microcontrollore, e quindi collegare breakout board FTDI al computer tramite cavo micro USB.
- Aprire il programma IDE (ambiente di sviluppo integrato).
- Selezionare la scheda microcontrollore corretto per il caricamento del software attraverso Strumenti> menu a discesa Consiglio.
- Selezionare ATMega 328 (5V, 16MHz) attraverso il> menu Strumenti del processore.
- Selezionare la porta che il microcontrollore è collegato al attraverso strumenti> Port> COM # (può variare a seconda di quale porta è attualmente in uso).
- Fare clic sul pulsante "upload" per caricare il disegno FED alla scheda (disponibile all'indirizzo: https://github.com/KravitzLab/fed/tree/master/fed-arduino).
4. Hardware di assemblaggio
- Motore passo-passo e motor scudo (Figure 1C e 3A e 3B)
- Fissare il motore passo-passo 5V sul 3D stampato supporto motore con due # 6 x ¼ "viti di lamiera (Figure 1C e 3A).
- Inserire disco rotante in supporto motore e spingere verso il basso per fissare saldamente all'albero motore passo-passo (Figura 3B).
- Twist in 3D cibo stampato silo sul supporto motore assicurandosi che il braccio di pellet livellatore è sopra il foro nel supporto motore.
- Twist su pezzi collegati da sopra (punti 4.1.1 - 4.1.3) alla parte superiore della base stampata, con il motore passo-passo posizionata verso la parte posteriore della base e il foro posizionato nella parte anteriore.
- Tagliare il connettore a 5 pin dai fili del motore passo-passo e strip ~ 2 mm dalla fine di ciascun filo.
- Collegare i fili da motore passo-passo ai connettori morsettiera sul scudo motore: rosso a terra, arancio e rosa per una porta del motore (ad esempio, M1), e blu e giallo per l'altra motor porta (ad esempio, M2).
- Pulsante di accensione esterno
- Rimuovere il dado dal tasto di accensione e inserire il tasto di alimentazione nel foro nel lato destro della base. Pulsante sicuro in posizione con dado esagonale.
- Fotointerruttori (Figura 3C)
- Posizionare il Photointerrupter nella sua sede stampati 3D.
NOTA: usare una pistola di calore per riscaldare l'alloggiamento se la Photointerrupter non sedile fino in fondo. - String il 3-pin connettore maschio "E" dalla Fotointerruttori (PWR, GND, e SGL) attraverso il foro centrale anteriore della base stampata in 3D.
- Fissare l'alloggiamento nella base FED con due viti 1 "in nylon e dadi corrispondenti.
- Posizionare il Photointerrupter nella sua sede stampati 3D.
- Cavo di uscita BNC (opzionale)
- Inserire il connettore BNC nel foro sul lato sinistro della base FED. Fissare in posizione con il dado.
- Se connettore BNC non viene utilizzato, Foro con spina 3D stampata.
- Batteria e scheda di spinta (Figura 3D)
- Collegare pacco batterie 3.7 V al modulo convertitore boost DC / DC tramite la JST collegamento a 2 poli. Il LED sul bordo Boost blu si accende se la batteria è carica.
- Schede di montaggio all'interno di abitazioni (Figura 3E)
- Monte microcontrollore interno della base con collegamenti FTDI di fronte l'interruttore di alimentazione, utilizzando # 4 x ¼ "viti per lamiera d'acciaio.
- Stack scudo motore e scudo registrazione dei dati sulla parte superiore del microcontroler.
- Avvitare la scheda Boost nel caso utilizzando # 2 x ¼ "viti per lamiera d'acciaio. Monte Boost con lo slot micro-SD rivolta verso il basso. FED può essere ricaricato attraverso questa porta senza aprire il caso.
- Collegare i cinque connettori, "A" maschile "A" femminile, "B" maschio a femmina "B", ecc
- Posizionare la batteria all'interno della base stampata in 3D e vicino facendo scorrere il coperchio posteriore. Far scorrere sulla piastra faccia 3D stampata.
5. Convalida e acquisizione dati
NOTA: Prima di accendere un sistema FED, assicurare una scheda SD è inserita sullo scudo SD, altrimenti FED non eroga pellet. Inoltre, assicurarsi ponticello potere sullo scudo del motore (appena sopra il blocco di potere) è a posto.
- Accendere il sistema FED con la funzionalità pulsante di alimentazione e dispositivo di test.
- Riempire silo cibo con 20 palline di cibo mg prima di accendere.
NOTA: L'interruttore di alimentazione dovrebbe accendersi, come dovrebbe LED sul microcontrollore, scudo SD, e lo scudo del motore. Se non c'è pellet nel pozzo, si dovrebbe dispensare. - Rimuovere manualmente 5 - 10 pellet dal cibo ben e confermare che la sostituzione pellet sono dispensati.
- Riempire silo cibo con 20 palline di cibo mg prima di accendere.
- Rimuovere la scheda SD e verificare che i dati è stato registrato correttamente. I dati devono essere acquisiti in valori separati da virgole (CSV) che viene denominato in base al vaFILENAME riable nel codice.
- Posizionare unità FED all'interno impostazione sperimentale, accensione, e assicurarsi che una pallina viene erogato nel cibo bene.
- Nel corso di acquisizione dei dati, controllare quotidianamente FED per verificare che funzioni correttamente confermando che la luce del LED l'interruttore è acceso (questo indica che la batteria ha carica sufficiente) e un pellet è seduto il cibo ben (indica che non vi sono problemi con pellet di erogazione).
- Dopo l'acquisizione dei dati, recuperare scheda SD e l'accesso ai file .csv.
NOTA: gli script di analisi per i pasti e modelli di alimentazione sono disponibili presso: https://github.com/KravitzLab/fed.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
test di validazione che prevedono l'uso di animali sono stati esaminati e approvati dal Comitato di cura e l'uso di animali presso il National Institute of Diabetes e Digestiva e Malattie renali. Per dimostrare l'uso di FED per la misurazione della casa gabbia alimentazione, femmina adulta C57BL topi / 6 (n = 4) sono stati alloggiati individualmente con ad libitum accesso all'acqua e chow standard di laboratorio nell'ambito di un ciclo di 12/12 h luce / buio (si accende a 5:00). Dopo un periodo di adattamento di una settimana, la tramoggia cibo è stato rimosso e sostituito con un FED per cinque giorni di test di validazione. Alla fine del periodo di prova, FED sono stati rimossi dalle gabbie e dati di alimentazione da ciascuna scheda SD è stata analizzata usando personalizzato, script liberamente disponibili e un foglio elettronico. Come mostrato nella Figura 4A, il recupero pellet per i singoli topi (pannello superiore; raster indicano eventi singolo pellet di recupero) e il recupero medio pellet in tutti i topi in 30 min bidoni (boPannello ttom; linea indica media ± SEM) mostrano l'alimentazione continua in tutto il periodo di test di validazione, con ritmicità circadiana chiaramente visualizzato. Per quantificare la precisione di capacità di registrazione dei dati della FED, ogni sistema FED è stato dato 1000 pellet per il periodo di test di validazione e le restanti pellet sono state contate e confrontate con i dati registrati sulla scheda SD manualmente. FED registrato 95.35 ± 1,25% di pellet che sono stati dispensati alla scheda SD (Figura 4B).

Figura 1: 3D Progettato FED componenti. (A) Misure di assemblato FED. (B) Vista esplosa dei componenti 3D stampati in un FED assemblato. (C) Esploso di montaggio serbatoio pellet completa (a sinistra), il montaggio del motore passo-passo su disco (al centro) a rotazione, e l'assemblaggio di silos cibo a disco rotante (restra). (D) Progettazione di cibo ben con le armi per garantire la Photointerrupter per il rilevamento pellet. (E) Fotografia di completamente montato FED. Clicca qui per vedere una versione più grande di questa figura.

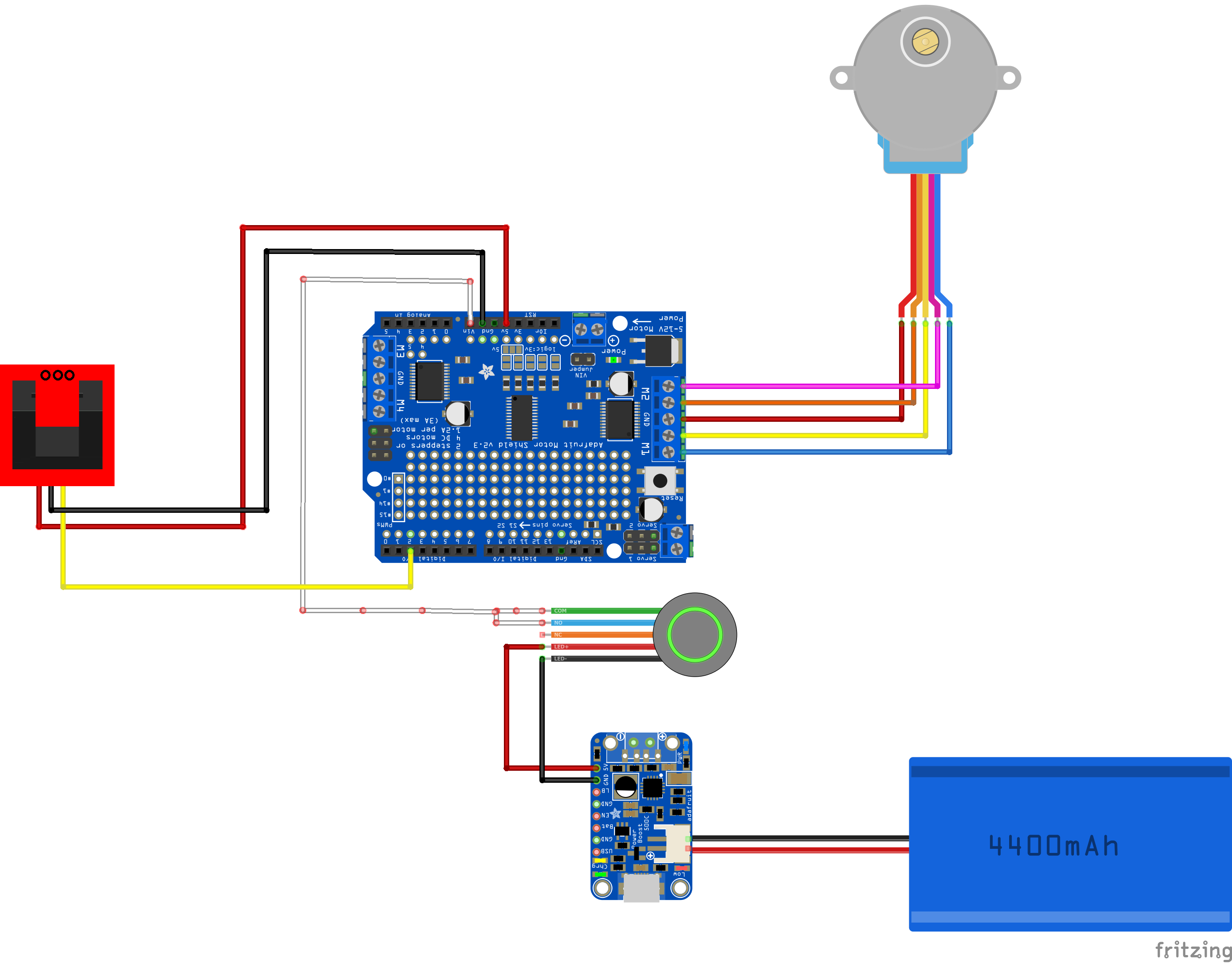
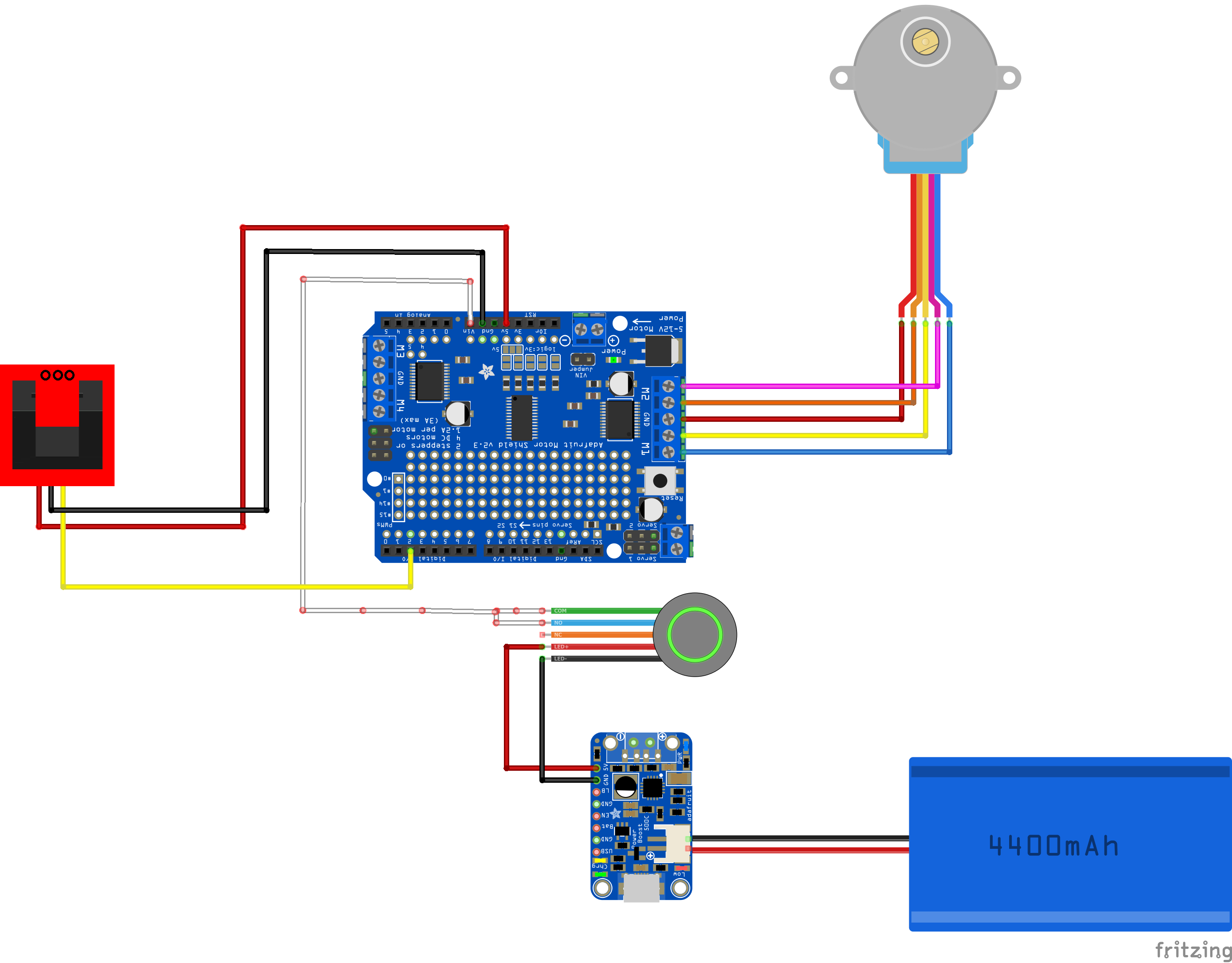
Figura 2: Cablaggio della FED componenti elettrici. Cablaggio e montaggio di (A) Connettori (B) Microcontroller, scudo dati di registrazione / SD, scudo del motore, (C) Pulsante di alimentazione, (D) Fotointerruttori, (E) bordo Boost, cavo di uscita (F) BNC, (G) Cablaggio di scudo motore. Clicca qui per vedere una versione più grandequesta figura.

Figura 3: Assemblaggio della FED hardware. (A) di montaggio motore passo-passo (a sinistra) nel supporto motore e il fissaggio del disco pellet (a destra). (B) del motore elettrico passo-passo per scudo motore. (C) Inserimento Photointerrupter in 3D stampato abitazioni. (D) Inserimento della batteria per amplificare il bordo. (E) le commissioni assemblati all'interno dell'alloggiamento FED. Clicca qui per vedere una versione più grande di questa figura.

Figura 4: Rappresentante assunzione di cibo Dati raccolti tramite FED. Dati Assunzione di cibo (A) raccolti tramite FED e visualizzati utilizzando script di analisi open-source. Pannello superiore: i singoli raster indicano eventi singoli pellet di recupero, con file che contengono i singoli topi. Base: linea indica media ± SEM di assunzione di cibo in tutto topi (n = 4). (B) Precisione delle singole unità FED di registrazione erogato pellet. I colori corrispondono a raster in figura 3A. Clicca qui per vedere una versione più grande di questa figura.

Figura 5: usi modificati per FED. (A) montati esternamente FED riduce lo spazio piano in gabbie di roditori. (B) Modifica della configurazione front-face permette l'aggiunta di due porte naso Poke per la formazione operante.ve.com/files/ftp_upload/55098/55098fig5large.jpg "target =" _ blank "> Clicca qui per vedere una versione più grande di questa figura.
Supplementare File 1: Hardware schematica. schematico grafico che mostra le connessioni elettroniche di FED. Clicca qui per scaricare il file.
Supplementare File 2: Esempio di codice di uscita. file CSV di esempio che mostra il codice di uscita dalla FED. Clicca qui per scaricare il file.
Supplemental Files 3-6: script di analisi. Quattro script di analisi sono forniti per l'analisi dei dati FED: eating_rate.py, meals.py, meal_bars.py, e plotmice.py. I parametri di input e descrizione è fornired in sezioni commentate nella parte superiore di ogni script. Clicca qui per scaricare il file.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Il dispositivo di alimentazione Sperimentazione (FED) è un sistema flessibile di controllo l'assunzione di cibo. Qui, descriviamo le istruzioni dettagliate su fabbricazione e risoluzione dei problemi del dispositivo, tra cui l'assemblaggio di hardware 3D stampata, la saldatura di componenti elettrici, e il caricamento di schizzi sui microcontrollori. Anche se è importante seguire tutti i passaggi indicati nel protocollo con attenzione, ci sono passaggi critici che meritano attenzione in più in ogni sezione al fine di garantire un prodotto finale di successo. Il 3D stampato disco rotante dovrebbe andare bene comodamente sull'albero motore passo-passo ed essere in grado di ruotare con resistenza minima dalle parti vicine. Quando la saldatura connessioni dei pin, assicurarsi che il giunto di saldatura è sicuro senza eccesso di stagno. Assicurarsi che tutte le librerie aggiuntive installate devono trovarsi nella directory corretta prima di caricare lo script sul microcontrollore. Il processo di assemblaggio FED comporta compiti che sono facilmente raggiungibili, anche senza preventivaesperienza nella stampa 3D o elettronica.
Ci sono alcune limitazioni con FED. In primo luogo, ogni FED utilizza una scheda SD interna per registrare e memorizzare i dati. Le schede SD possono essere un mezzo ingombrante per tenere traccia e memorizzare i dati provenienti da molti FED. Stiamo esplorando il trasferimento dei dati wireless per alleviare questo problema, ma l'iterazione corrente della FED, si affida al storage locale su schede SD. In secondo luogo, ~ 5% del tempo FED eroga due palline invece di uno. Mentre marmellate pellet non si sono verificati nelle nostre mani con sufficiente frequenza per contare, questa possibilità dovrebbe essere strettamente monitorato come non possiamo escludere completamente. Gli utenti non dovrebbero mai lasciare topi con FED come loro unica fonte di cibo senza controllare la funzionalità della FED quotidiana. Nonostante questi limiti, riteniamo che il tasso di errore del FED è accettabile per la maggior parte degli studi di ricerca. Detto questo, nel lavoro futuro si cercherà di ridurre ulteriormente questi errori. Infine, la tolleranza della stampa 3D può variare a seconda della specifica stampante 3D e materiale. Cometali, i file di progettazione 3D che forniamo possono avere bisogno di essere ottimizzato per la stampa su altri modelli di stampante 3D, o con altri materiali. Come un suggerimento utile, abbiamo trovato che una pistola di calore può essere utilizzato dopo la stampa per ammorbidire parti stampate in 3D per piccoli aggiustamenti.
Un singolo FED può essere montato per circa $ 350. Di questo prezzo, si stima ~ $ 200 per la stampa 3D commerciale di materiale PLA, e ~ $ 150 per l'acquisto di componenti elettronici. i costi di stampa 3D variano notevolmente a seconda della qualità e del materiale. È possibile ridurre questo costo notevolmente se un utente stampa loro parte. FED potrebbe anche essere stampato o lavorato su materiali più durevoli come acciaio inossidabile o alluminio, anche se questo sarebbe costoso.
Abbiamo scelto di costruire FED con un microcontrollore su un circuito programmabile con una piattaforma open-source. Per questo, abbiamo scelto il microcontrollore open source (vedi Tabella dei Materiali), in quanto ha unabasso assorbimento di potenza. Tuttavia, il codice dovrebbe funzionare su qualsiasi scheda che ha sufficienti piedini di ingresso / uscita. Cambiare schede a microcontrollore probabilmente richiederà piccole modifiche al codice. Forniamo tutti i file di progetto e il codice in linea, e il nostro progetto è open-source per fornire ai ricercatori la flessibilità di modificare FED per soddisfare le loro esigenze, compreso l'uso di altre schede a microcontrollore.
Vi è una crescente tendenza verso l'hardware open-source per la ricerca scientifica. Vari gruppi hanno reso i dispositivi open-source per la ricerca delle neuroscienze, tra cui OpenControl, un software per il video di monitoraggio degli animali durante le attività comportamentali 7; ROBucket, una camera operante Arduino-based per la consegna esito liquido 8; ELOPTA, un dispositivo operante PICmicro-based per la consegna del pellet esito 9; e BEEtag, un sistema di monitoraggio basato su immagini per bombi 10. FED integra questi con il suo fattore di forma unica e lcosto OW. Uno degli obiettivi principali per la FED è stato quello di rendere open-source. hardware libero permette ai ricercatori di effettuare modifiche minori ai disegni (per esempio per modificare le dimensioni), ma è particolarmente potente quando gli utenti eseguono importanti modifiche per espandere le funzionalità dell'hardware. Ad esempio, è abbastanza semplice modificare il disegno della FED per montaggio esterno su una gabbia, che sia protegge FED e aumenta spazio all'interno della gabbia (Figura 5A). Inoltre, abbiamo progettato FED di avere spazio per naso-poke su ogni lato della alimentazione e per la formazione operante, ed abbiamo implementato con successo questi con le modifiche di progettazione minori (Figura 5B). Noi pubblicheremo tali sviluppi sul nostro sito web (https://github.com/KravitzLab/fed), dove abbiamo anche lieti di ospitare altri tali miglioramenti da parte della comunità di ricerca.
Subscription Required. Please recommend JoVE to your librarian.
Acknowledgments
Questo lavoro è stato sostenuto dal Programma Intramural Research del National Institutes of Health (NIH), l'Istituto nazionale di diabete e Digestiva e Malattie renali (NIDDK). Ringraziamo la sezione NIH sulla strumentazione e la Biblioteca NIH per l'assistenza con la stampa 3D.
Materials
| Name | Company | Catalog Number | Comments |
| Electronics | |||
| Adafruit Motor/Stepper/Servo Shield for Arduino v2 Kit - v2.3 | Adafruit | 1438 | Use of other motor shields has not been tested and will require changes to the code |
| Adafruit Assembled Data Logging shield for Arduino | Adafruit | 1141 | Use of other data logging shields has not been tested and will require changes to the code |
| PowerBoost 500 Charger | Adafruit | 1944 | Other voltge regulator boards have not been tested, but should work if they have similar specifications |
| FTDI Friend + extras - v1.0 | Adafruit | 284 | Any FTDI-USB connection will work |
| Small Reduction Stepper Motor - 5VDC 32-Step 1/16 Gearing | Adafruit | 858 | Use of other stepper motors has not been tested |
| Arduino Pro 328 - 5V/16MHz | SparkFun | DEV-10915 | Other Arduino boards should work, although may require changes to the code |
| Photo Interrupter - GP1A57HRJ00F | SparkFun | SEN-09299 | Other photointerrupters will work, but may require changes to the 3D design |
| SparkFun Photo Interrupter Breakout Board - GP1A57HRJ00F | SparkFun | BOB-09322 | Other photointerrupters will work, but may require changes to the 3D design |
| Connectors, screws, and miscellaneous items | |||
| Shield stacking headers for Arduino (R3 Compatible) | Adafruit | 85 | Any stacking header that says Arduiono R3 compatible will work |
| Multi-Colored Heat Shrink Pack - 3/32" + 1/8" + 3/16" | Adafruit | 1649 | Any heatshrink will work |
| Hook-up Wire Spool Set - 22AWG Solid Core - 6x25ft | Adafruit | 1311 | Any wire will work |
| Lithium Ion Battery Pack - 3.7V 4400 mAh | Adafruit | 354 | Any 3.7 V Lithium battery with a JST connector will work |
| SD/MicroSD Memory Card (8GB SDHC) | Adafruit | 1294 | Any SD card will work |
| 50 Ohm BNC Bulkhead Jack (3/8" D-Hole) | L-com | BAC70A | Any BNC bulkhead will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 6 size, 1/4" Length | McMaster-Carr | 90184A120 | Any screws of this specification will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 2 size, 1/4" Length | McMaster-Carr | 91735A102 | Any screws of this specification will work |
| Nylon 100 Degree Flat Head Slotted Machine Screw, 4-40 Thread, 1" Length | McMaster-Carr | 90241A253 | Any screws of this specification will work |
| Nylon Hex Nut, 4-40 Thread Size | McMaster-Carr | 94812A200 | Any nut of this specification will work |
| 2 Pin JST M F Connector 200 mm 22AWG Wire Cable | NewEgg | 9SIA27C3FY2876 | Any 2 pin connector will work for this connection |
| Metal Pushbutton - Latching (16 mm, Red) | SparkFun | COM-11971 | Any push button or switch will work |
| Resistor Kit - 1/4 W | SparkFun | COM-10969 | Any 1/4 W resistors will work |
References
- Ellacott, K. L., Morton, G. J., Woods, S. C., Tso, P., Schwartz, M. W. Assessment of feeding behavior in laboratory mice. Cell Metab. 12 (1), 10-17 (2010).
- Betley, J. N., et al. Neurons for hunger and thirst transmit a negative-valence teaching signal. Nature. 521 (7551), 180-185 (2015).
- van den Heuvel, J. K., et al. Neuropeptide Y activity in the nucleus accumbens modulates feeding behavior and neuronal activity. Biol Psychiatry. 77 (7), 633-641 (2015).
- Cone, J. J., Roitman, J. D., Roitman, M. F. Ghrelin regulates phasic dopamine and nucleus accumbens signaling evoked by food-predictive stimuli. J Neurochem. 133 (6), 844-856 (2015).
- Ulman, E. A., Compton, D., Kochanek, J. Measuring food and water intake in rats and mice. ALN Mag. , 17-20 (2008).
- Nguyen, K. P., O'Neal, T. J., Bolonduro, O. A., White, E., Kravitz, A. V. Feeding Experimentation Device (FED): A flexible open-source device for measuring feeding behavior. J Neurosci Methods. 267, 108-114 (2016).
- Aguiar, P., Mendonca, L., Galhardo, V. OpenControl: a free opensource software for video tracking and automated control of behavioral mazes. J Neurosci Methods. 166 (1), 66-72 (2007).
- Devarakonda, K., Nguyen, K. P., Kravitz, A. V. ROBucket: A low cost operant chamber based on the Arduino microcontroller. Behav Res Methods. 48 (2), 503-509 (2016).
- Hoffman, A. M., Song, J., Tuttle, E. M. ELOPTA: a novel microcontroller-based operant device. Behav Res Methods. 39 (4), 776-782 (2007).
- Crall, J. D., Gravish, N., Mountcastle, A. M., Combes, S. A. BEEtag: A Low-Cost, Image-Based Tracking System for the Study of Animal Behavior and Locomotion. PLoS One. 10 (9), (2015).

{kind=link}
{kind=link}