

Introduction
Met de opkomst van de wereldwijde obesitas over de tweede helft van de 20e eeuw, is er hernieuwde aandacht op de mechanismen die ten grondslag liggen aan het voeden van 1, 2, 3, 4. Typisch wordt voedselinname handmatig gewogen 5 of met commercieel verkrijgbare voersystemen. Commerciële systemen zijn uitstekend, maar bieden beperkte flexibiliteit in het wijzigen van hun ontwerpen of code. Hier beschrijven we de Feeding Experimentation Device (FED): een open-source voersysteem voor het meten van de voedselinname met fijne tijdsresolutie en minimale menselijke tussenkomst 6. FED is op batterijen en volledig opgenomen in een 3D geprint koffer die passen binnen standaard kolonie rack kooien of andere wetenschappelijke apparatuur.
In de stationaire toestand, FED opereert in een low-power mode met een voedsel pellet rusten in de food goed. De aanwezigheid van de pellet wordt via een infraroodstraal. Wanneer een muis een pellet verwijdert, een foto-onderbreker sensor stuurt een signaal naar de microcontroller en de tijd-stempel is aangemeld op de onboard Secure Digital (SD) kaart. Tegelijkertijd, een transistor-transistor logica (TTL) uitgang biedt een real-time productie van pellets retrieval. Onmiddellijk na deze gebeurtenis, de motor draait op een andere pellet af te geven, en het systeem keert terug naar de low power mode. Door zijn open-source karakter, kan FED worden aangepast en verbeterd om specifiek onderzoek behoeften. Bijvoorbeeld kan de code eenvoudig veranderd om voeding te beperken tot bepaalde tijden van de dag of stoppen afgeven wanneer verschillende pellets bereikt worden, zonder menselijke tussenkomst.
Hier, schetsen we de stap-voor-stap instructies voor de bouw, de validatie, en het gebruik van de FED voor het meten van voedselinname bij muizen. Wij bieden een overzicht van alle componenten om een systeem te bouwen. Belangrijk is dat geen voorafgaande exvaring in de elektronica nodig te bouwen FED.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
LET OP: Dit protocol is geschreven voor componenten met name in de tabel van Materialen genoemd. Terwijl vergelijkbare functionaliteit kan worden bereikt met andere hardware, werd FED geprogrammeerd voor de Arduino Pro microcontroller (voortaan genoemd: microcontroller) en beursgenoteerde accessoires. Andere microcontrollers kan even goed werken, maar zal de gebruiker vereisen om de code om hen te steunen aan te passen. Offline data-analyse werd gecodeerd met behulp van de programmeertaal Python.
1. Voorbereiding en software-installatie
- Procure elektronische componenten die nodig zijn om te bouwen FED (zie tabel 1 andFed Github BoM.xlxs op: https://github.com/KravitzLab/FED/tree/master/doc).
LET OP: alternatieve leveranciers kan worden gebruikt voor veel onderdelen op deze lijst, op voorwaarde dat zij gelijkwaardige specificaties. - Druk alle 3D ontworpen onderdelen (figuur 1, beschikbaar op: https://github.com/KravitzLab/FED/wiki/3D-Printed-Components). 3D printers met een 200 micronresolutie moet in staat zijn af te drukken FED zijn.
- Download en installeer de Integrated Development Environment (IDE) platform om de microcontroller te programmeren.
- Download en installeer extra bibliotheken om de functionaliteit van de motor schild en datalogger (beschikbaar op: https://github.com/KravitzLab/fed/tree/master/fed-arduino) mogelijk te maken.
- Procure tools die nodig zijn voor de montage (bijvoorbeeld een soldeerbout, heat gun, soldeer, draad strippers, naald-nosed tang, en beide platte kop en schroevendraaiers).
2. solderen elektrische componenten
OPMERKING: Gebruik krimpkous om alle soldeerverbindingen beschermen. Vóór soldeerverbindingen Schuif een stukje krimpkous buis (~ 2 cm) buis rond een van de draden. Na het solderen van de verbinding, centreren de slang op de aansluiting en het gebruik van een warmte kanon te verwarmen krimpen de slang.
- Voorbereiden van aansluitingen (Figuur 2A)
- Bereid vier 2-pin connector JST paren enlabel zowel mannelijke als vrouwelijke zijden "A", "B", "C" en "D", respectievelijk. Verwijder de rode draad van beide kanten van de aansluiting pair "D".
- Bereid een 3-pins connector JST pair en label zowel mannelijke als vrouwelijke kanten "E".
- Microcontroller en stapelbaar schilden (figuur 2B)
- Soldeer vrouwelijke stapelbare koppen met aansluitingen aan de bovenzijde van de microcontroller. Clip uitsteekt draad van headers aan de onderkant van de microcontroller.
- Solder vrouwelijke stapelbare koppen met aansluitingen aan de bovenkant van de SD data logging schild. Laat uitstekende draden aan de onderkant van het schild.
- Soldeer mannelijke headers op de motor schild met pennen die uitsteken vanaf de bodem.
- Plaats een knoopcel batterij in de sleuf van de SD-schild om stroom te leveren aan de real-time klok module.
- Externe uit-knop (figuur 2C)
LET OP: Een vergrendeling metalen drukknop has vijf verbindingen: macht, grond, normaal gesloten (NC1), normaal open (NO1), en vaak (C1).- Soldeer de 2-polige stekker "A" naar C1 (gebruik rode draad) en de grond (gebruik zwarte draad). Warmte-shrink alle aansluitingen.
- Soldeer de 2-pins mannelijke connector "B" naar + (gebruik rode draad) en NO1 (gebruik zwarte draad). Warmte-shrink alle aansluitingen.
- Photointerrupter (Figuur 2D)
- Solder foto-onderbreker (het zwarte gedeelte) aan boord breakout.
- Soldeer een 4.7K weerstand aan de voorkant van de breakout board.
- Soldeer de male 3-pins connector "E" op de achterkant van de breakout bord: rode draad op de PWR, groene draad aan GND en witte draad aan SGL.
- Trim losse draden aan de achterkant van de foto-onderbreker breken boord.
- Boost board (figuur 2E)
- Soldeer de 2-pin female connector "A" naar 5V en Ground pinnen op de boost boord.
- Soldeer de zwarte draad van male connector "D" om de extra GND pin op de boost boord.
- BNC-uitgang kabel (optioneel: figuur 2F)
- Soldeer de 2-pin connector "C" om de aansluitingen van een BNC-kabel (rode draad op de centrale pin, zwarte draad naar buiten pin).
LET OP: Voor de montage, moet de 2-pin connector passen door de moer op de BNC-stekker. We maken gebruik van een kleinere connector, of scheren langs de JST connector met een scheermesje om het te laten passen.
- Soldeer de 2-pin connector "C" om de aansluitingen van een BNC-kabel (rode draad op de centrale pin, zwarte draad naar buiten pin).
- Motor Shield (figuur 2G)
- Draai de rode en zwarte draden van de vrouwelijke connector "B" bij elkaar en soldeer V in.
- Soldeer de zwarte draad van de vrouwelijke connector "C" naar de grond pin naast AREF, en de rode draad van deze connector aan pin 3.
- Soldeer de zwarte draad van de vrouwelijke connector "D" naar de grond pin naast V in.
- Soldeer de groene draad van de vrouwelijke connector "E" naar de grond pinnaast de 5V, de rode draad van deze connector naar 5V, en de witte draad van deze connector aan pin 2.
3. Software Upload
- Sluit de FTDI breakout bord om de programmering pinnen van de microcontroller en sluit FTDI breakout board computer via een micro-USB-kabel.
- Open het programma IDE (integrated development environment).
- Selecteer de juiste microcontroller board voor software-upload via Extra> Board dropdown menu.
- Selecteer ATMega 328 (5V, 16MHz) via de Extra> Processor menu.
- Selecteer de poort die de microcontroller is verbonden door middel van Extra> Port> COM # (zal variëren afhankelijk van welke poort is momenteel in gebruik).
- Klik op de "upload" knop om de FED schets tot de raad van bestuur (beschikbaar op: https://github.com/KravitzLab/fed/tree/master/fed-arduino) uploaden.
4. Hardware Assembly
- Stappenmotor en motor schild (Figuren 1C en 3A en 3B)
- Zet de 5V stappenmotor op de 3D-gedrukte motorsteun met twee # 6 x ¼ "plaatwerk schroeven (figuren 1C en 3A).
- Plaats roterende schijf in de motor te monteren en duw om veilig te hechten aan stappenmotor as (Figuur 3B).
- Twist over 3D geprint voedsel silo op de motor te monteren zorg ervoor dat de pellet leveler arm is over het gat in de motor mount.
- Draai de aangesloten delen van hierboven (stappen 4.1.1 - 4.1.3) aan de bovenkant van de gedrukte base, de stappenmotor gepositioneerd aan de achterkant van de basis en het gat gepositioneerd aan de voorkant.
- Snijd de 5-polige stekker van de stappenmotor draden of strippen ~ 2 mm van het uiteinde van elke draad.
- Sluit de draden van de stappenmotor naar de terminal blok connectors op de motor schild: rood aan de grond, oranje en roze tot één motor poort (bijvoorbeeld M1) en blauw en geel aan de andere motor-poort (bijv M2).
- Externe uit-knop
- Verwijder de moer van de power-knop en plaats de knop in het gat in de rechterkant van de basis. Secure-knop in plaats met hex moer.
- Photointerrupter (Figuur 3C)
- Plaats de foto-onderbreker in zijn 3D geprint behuizing.
LET OP: gebruik een warmte kanon te warmen de behuizing als de foto-onderbreker helemaal in niet stoel. - String de 3-polige stekker "E" van de foto-onderbreker (PWR, GND, en SGL) door het voorste middelste gat van de 3D gedrukte basis.
- Bevestig de behuizing in de FED basis met twee 1 "nylon schroeven en de bijbehorende moeren.
- Plaats de foto-onderbreker in zijn 3D geprint behuizing.
- BNC-uitgang kabel (optioneel)
- Steek BNC connector in het gat aan de linkerkant van de FED basis. Vast te zetten met moer.
- Als BNC connector niet gebruikt wordt, sluit gat met 3D geprint stekker.
- Batterij en boost board (figuur 3D)
- Sluit de 3,7 V batterij aan op de DC / DC boost converter module via de JST 2-pins aansluiting. De blauwe LED op de Boost boord gaat branden als de batterij wordt opgeladen.
- Montage planken binnenkant van de behuizing (figuur 3E)
- Mount microcontroller binnenkant van de voet met FTDI verbindingen met uitzicht op de schakelaar, met behulp van # 4 x ¼ "stalen plaatwerk schroeven.
- Stapel motor schild en data logging schild op de top van de microcontroler.
- Schroef de Boost board in de behuizing met behulp van # 2 x ¼ "stalen plaatwerk schroeven. Mount Boost met de micro-SD-sleuf naar beneden wijst. FED kan worden opgeladen via deze poort zonder het openen van de zaak.
- Sluit de vijf connectors, "A" male naar "A" female, "B" male naar "B" female, etc.
- Plaats de batterij in de 3D-gedrukte basis en in de buurt door het schuiven van de achterklep. Schuif op de 3D geprint voorplaat.
5. Validatie en Data Acquisition
NB: Voorafgaand aan het inschakelen van een FED-systeem, zorgen voor een SD-kaart op de SD schild geplaatst, anders FED zal niet pellets af te geven. Bovendien zorgen de macht jumper op de motor schild (net boven het machtsblok) op zijn plaats.
- Schakel FED-systeem met de kracht drukknop en testapparaat functionaliteit.
- Voedsel vul silo met 20 mg voedsel pellets voor het inschakelen.
Attentie: de schakelaar moet gaan branden, evenals LED's op de microcontroller, SD schild, en de motor schild. Als er geen pellet in de put moet men afzien. - Handmatig verwijderen 5-10 pellets van het eten goed en controleer of vervanging pellets worden afgegeven.
- Voedsel vul silo met 20 mg voedsel pellets voor het inschakelen.
- Verwijder de SD-kaart en controleer of de gegevens correct werd geregistreerd. De gegevens moeten in een door komma's gescheiden waarden (CSV) met de naam worden verkregen op basis van de variabele FILENAME in de code.
- Plaats FED unit binnen experimentele setting, macht op, en ervoor te zorgen dat een pellet wordt afgegeven in het eten goed.
- In de loop van data-acquisitie, check FED dagelijks om te controleren of deze goed werkt door te bevestigen dat de LED-lampje op de schakelaar op (dit geeft aan dat de batterij voldoende lading) en een pellet zit in het eten goed (geeft dat er geen problemen pellet afgifte).
- Na de overname van gegevens, op te halen SD-kaart en de toegang CSV-bestand.
LET OP: Analyse scripts voor de maaltijden en de patronen van het voeden zijn beschikbaar op: https://github.com/KravitzLab/fed.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Valideringsproeven die het gebruik van dieren werden beoordeeld en goedgekeurd door de Animal Care en gebruik Comite van het National Institute of Diabetes en spijsvertering en Kidney Diseases goedgekeurd. Om het gebruik van de FED te tonen voor het meten van kooi voeden, volwassen vrouwelijke C57BL / 6 muizen (n = 4) werden individueel gehuisvest met ad libitum toegang tot water en standaard laboratorium chow onder een 12/12 uur licht / donker-cyclus (lichten aan om 05:00). Na een week gewenningsperiode werd het eten trechter verwijderd en vervangen door een FED vijf dagen na validatie testen. Aan het einde van de testperiode werden FEDs verwijderd uit de kooien en voeden gegevens van elke SD-kaart werd geanalyseerd met behulp van aangepaste, vrij verkrijgbare scripts en een spreadsheetprogramma. Zoals weergegeven in figuur 4A, pellet retrieval voor individuele muizen (bovenste paneel; rasters geven enkele pellet retrieval evenementen) en de gemiddelde pellet ophalen in alle muizen in 30 minuten bakken (bottom panel; lijn geeft gemiddelde ± SEM) tonen continue toevoer over de validatie testen periode, met duidelijk zichtbaar circadiane ritmiek. Om de nauwkeurigheid van de FED data logging capaciteit te kwantificeren, werd elke FED systeem gegeven 1.000 pellets voor de validatie testen periode en de resterende pellets werden met de hand geteld en vergeleken met gelogde gegevens op de SD-kaart. FED ingelogd 95,35 ± 1,25% van de pellets die werden verstrekt op de SD-kaart (Figuur 4B).

Figuur 1: 3D Ontworpen FED Components. (A) Afmetingen van geassembleerde FED. (B) Exploded view 3D gedrukte elementen in een samengestelde FED. (C) explosieaanzicht van volledige pellettrechter samenstel (links), samenvoegen van stappenmotor draaiende schijf (midden), en assemblage van voedsel silo draaiende schijf (rechts). (D) Het ontwerpen van eten goed met wapens om de foto-onderbreker voor pellet detectie te beveiligen. (E) Foto van volledig geassembleerde FED. Klik hier om een grotere versie van deze figuur te bekijken.

Figuur 2: Bezetting van de FED elektrische componenten. Bedrading en montage van (A) Connectors (B) Microcontroller, Data logging / SD schild, Motor schild, (C) uit-knop, (D) Photointerrupter, (E) Boost board, (F) BNC-uitgang kabel, (G) bedrading van de motor schild. Klik hier om een grotere versie te bekijkendit figuur.

Figuur 3: Assemblage van FED Hardware. (A) Montage stappenmotor (links) in de motor mount en het bevestigen van pellet schijf (rechts). (B) bedrading stepper motor motor schild. (C) Invoegen foto-onderbreker in 3D geprint behuizing. (D) bevestigen batterij boord Boost. (E) Boards gemonteerd binnen FED behuizing. Klik hier om een grotere versie van deze figuur te bekijken.

Figuur 4: Vertegenwoordiger voedselinname gegevens verzameld via FED. (A) De inname van voedsel gegevens via FED verzameld en gevisualiseerd met behulp van open-source analyse scripts. Top panel: individuele rasters geven enkele pellet retrieval evenementen, met rijen met individuele muizen. Onderkant: lijn geeft gemiddelde ± SEM van de voedselinname over muizen (n = 4). (B) Nauwkeurigheid van afzonderlijke FED-eenheden in te loggen afgegeven pellets. Kleuren benaderen rasters in figuur 3A. Klik hier om een grotere versie van deze figuur te bekijken.

Figuur 5: Gewijzigde toepassingen voor FED. (A) Extern gemonteerde FED verlaagt vloeroppervlak in knaagdieren kooien. (B) Het veranderen van de front-gezicht configuratie zorgt voor de toevoeging van twee neus poke-poorten voor operant training.ve.com/files/ftp_upload/55098/55098fig5large.jpg "target =" _ blank "> Klik hier om een grotere versie van deze figuur te bekijken.
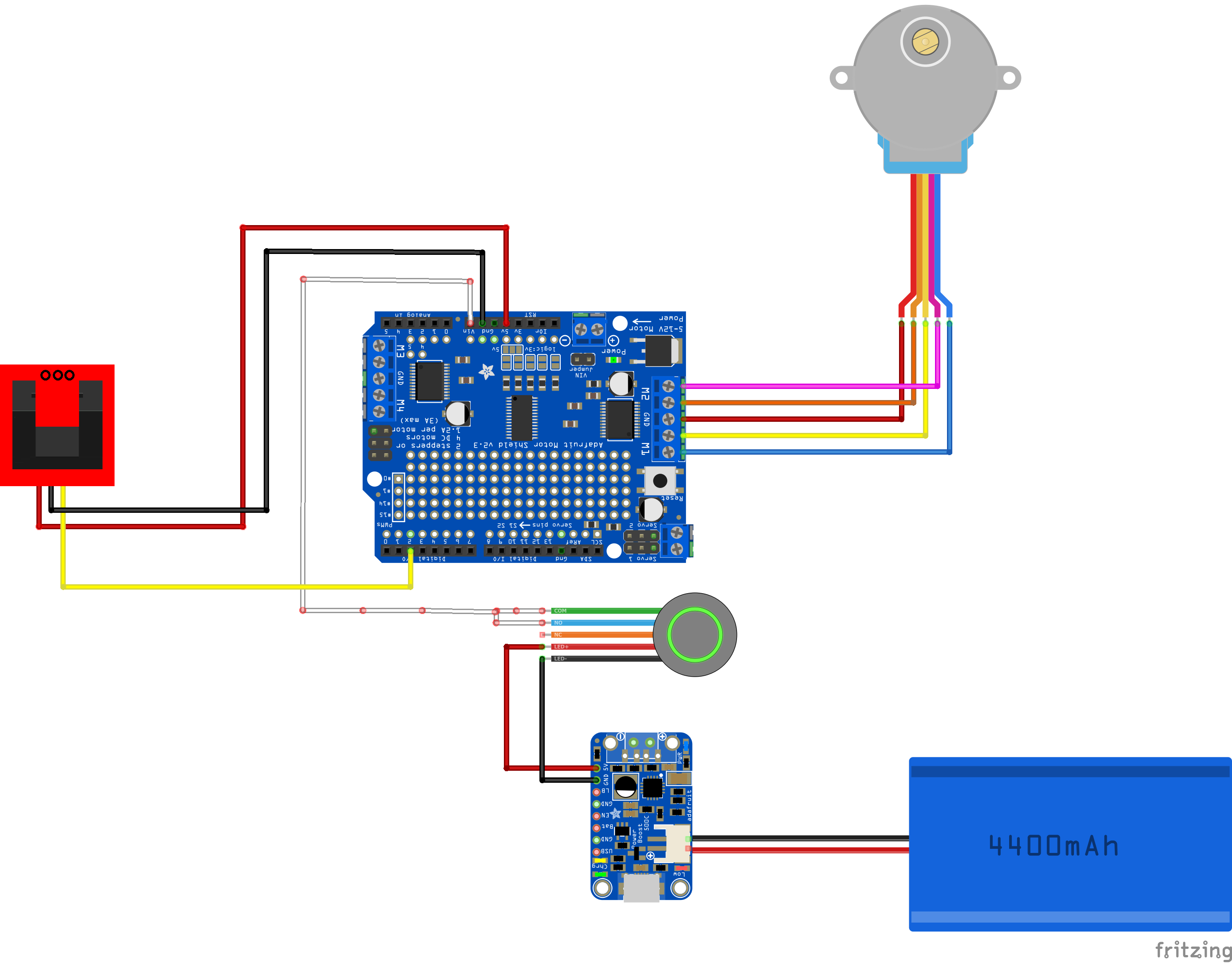
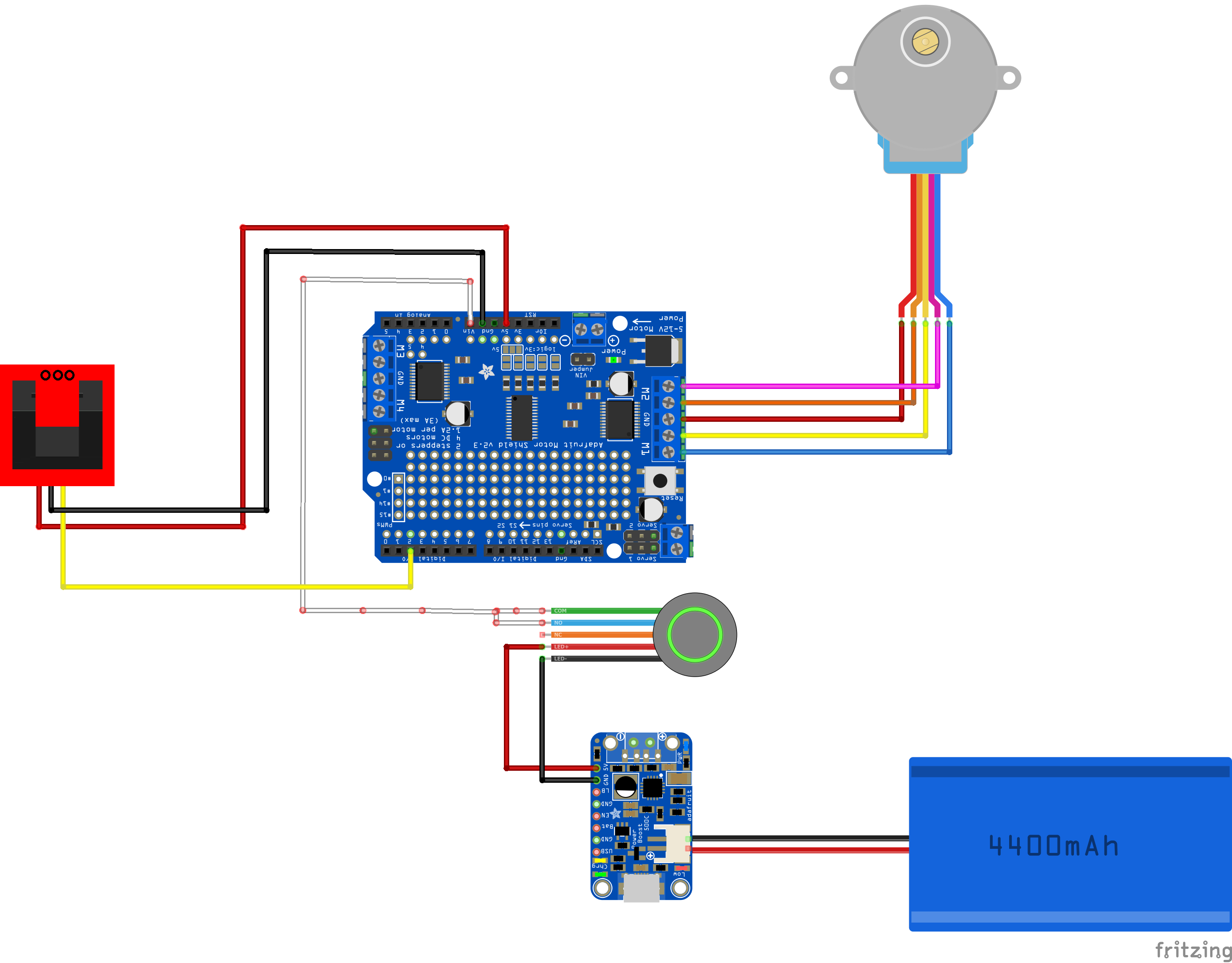
Aanvullende File 1: Hardware Schematische. Graphic schematische weergave van de elektronische verbindingen van de FED. Klik hier om dit bestand te downloaden.
Aanvullende File 2: Sample Output Code. Monster CSV-bestand tonen uitgang code van FED. Klik hier om dit bestand te downloaden.
Aanvullende Files 3-6: Analyse Scripts. Vier analyse scripts zijn bedoeld voor het analyseren van FED gegevens: eating_rate.py, meals.py, meal_bars.py en plotmice.py. Input parameters en beschrijving is voorziend in het commentaar secties bovenaan elk script. Klik hier om dit bestand te downloaden.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
De Feeding Experimentation Device (FED) is een flexibele voedselinname bewakingssysteem. We beschrijven hier gedetailleerde instructies voor het vervaardigen en oplossen van problemen met het apparaat, met inbegrip van de assemblage van 3D geprint hardware, solderen van elektrische onderdelen, en het uploaden van sketches op de microcontrollers. Hoewel het belangrijk om alle stappen in het protocol nauwgezet te volgen, zijn er kritische stappen die extra aandacht verdienen in elke sectie tot een goed einde product. De 3D-gedrukte roterende schijf moet goed passen op de stappenmotor as en in staat zijn om te draaien met een minimale weerstand van naburige onderdelen. Bij het solderen pin aansluitingen, zorg ervoor dat de soldeerverbinding veilig is zonder overtollige soldeer. Zorg ervoor dat alle extra bibliotheken geïnstalleerd moeten zich in de juiste directory voor het uploaden van het script op de microcontroller. Werkwijze voor het samenstellen FED betreft taken die gemakkelijk bereikbaar zijn, zelfs zonder voorafgaandeervaring in 3D printing of elektronica.
Er zijn maar weinig beperkingen met FED. Ten eerste, elk FED gebruikt een interne SD-kaart om gegevens op te slaan en te loggen. SD-kaarten kan een omslachtige manier om bij te houden en opslaan van gegevens uit vele FEDs. We zijn het verkennen van draadloze gegevensoverdracht naar dit probleem te verlichten, maar de huidige iteratie van FED is gebaseerd op de lokale opslag op SD-kaarten. Anderzijds ~ 5% van de tijd FED afgeeft twee pellets in plaats van één. Terwijl pellet jams hebben niet plaatsgevonden in onze handen met voldoende frequentie te tellen, moet deze mogelijkheid streng gecontroleerd worden als we kunnen ze niet helemaal uit te sluiten. Gebruikers moeten nooit muizen met FED te verlaten als hun enige bron van voedsel, zonder de dagelijkse controle van de functionaliteit FED. Ondanks deze beperkingen, zijn wij van mening FED foutenpercentage is aanvaardbaar voor de meeste onderzoeken. Dat gezegd hebbende, in de toekomstige werkzaamheden zullen we proberen om deze fouten verder te verlagen. Tenslotte kan de tolerantie van 3D printing variëren naargelang de specifieke 3D printer en materiaal. Alszodanig 3D ontwerpbestanden wij moeten mogelijk worden afgesteld voor het afdrukken op andere modellen van 3D printer of met andere materialen. Als een goede tip hebben wij gevonden dat een warmtepistool kan worden gebruikt na het afdrukken op 3D geprint onderdelen voor kleine aanpassingen verzachten.
Eén FED kan worden geassembleerd ongeveer $ 350. Van deze prijs, we schatten ~ $ 200 voor commerciële 3D-printen van PLA materiaal en ~ $ 150 voor de aanschaf van de elektronische componenten. 3D printing kosten variëren sterk, afhankelijk van de kwaliteit en het materiaal. Het is mogelijk om deze kosten aanzienlijk toe wanneer een gebruiker zijn eigen onderdelen afgedrukt verminderen. FED kan ook worden afgedrukt of gefreesd uit een duurzamer materiaal, zoals roestvrij staal of aluminium, hoewel dit duurder zou zijn.
We kozen ervoor om FED te bouwen met een microcontroller op een programmeerbare printplaat met een open-source platform. Hiervoor kozen we de open source microcontroller (zie tabel of Materials), want het heeft eenlaag stroomverbruik. Toch moet onze code werken op elk bord dat voldoende input / output pinnen heeft. Het veranderen van microcontroller boards zal waarschijnlijk vereisen kleine wijzigingen in de code. Wij bieden alle ontwerp bestanden en code online, en ons ontwerp is open-source voor onderzoekers flexibiliteit te bieden om FED passen aan hun behoeften, inclusief het gebruik van andere microcontroller boards.
Er is een groeiende trend naar open-source hardware voor wetenschappelijk onderzoek. Verschillende groepen hebben open-source-apparaten gemaakt voor neurowetenschappelijk onderzoek, met inbegrip van OpenControl, een software voor video-tracking dieren tijdens gedragstaken 7; ROBucket, een Arduino-gebaseerde operante kamer voor uitkomst aflevering 8 vloeistof; ELOPTA, een PICmicro gebaseerde operante apparaat voor pellet uitkomst aflevering 9; en BEEtag, een image-based volgsysteem voor hommels 10. FED vult deze met zijn unieke form factor en low kosten. Een belangrijke doelstelling voor de FED was om het open-source te maken. Openhardware Onderzoekers kunnen kleine aanpassingen uit te voeren om ontwerpen (bijvoorbeeld de afmetingen aanpassen), maar is bijzonder krachtig wanneer gebruikers voeren belangrijke wijzigingen in de functionaliteit van de hardware vergroten. Zo is het vrij gemakkelijk om het ontwerp van FED voor de aanbouw aan een kooi, dat zowel beschermt FED en verhoogt vloerruimte binnen de kooi (figuur 5A) te wijzigen. Bovendien ontwierpen we FED ruimte voor neus-bemoeit aan beide zijden van de toevoertransporteur goed voor operante opleiding en met succes uitgevoerd met deze kleine ontwerpwijzigingen (Figuur 5B). We zullen deze ontwikkelingen op onze website (https://github.com/KravitzLab/fed), waar we ook uitkijken naar het hosten van andere dergelijke verbeteringen van de onderzoeksgemeenschap te posten.
Subscription Required. Please recommend JoVE to your librarian.
Acknowledgments
Dit werk werd ondersteund door de Intramurale Research Program van de National Institutes of Health (NIH), het National Institute of Diabetes en spijsvertering en Kidney Diseases (NIDDK). Wij danken de NIH Sectie op Instrumentatie en de NIH bibliotheek voor hulp bij het 3D-printen.
Materials
| Name | Company | Catalog Number | Comments |
| Electronics | |||
| Adafruit Motor/Stepper/Servo Shield for Arduino v2 Kit - v2.3 | Adafruit | 1438 | Use of other motor shields has not been tested and will require changes to the code |
| Adafruit Assembled Data Logging shield for Arduino | Adafruit | 1141 | Use of other data logging shields has not been tested and will require changes to the code |
| PowerBoost 500 Charger | Adafruit | 1944 | Other voltge regulator boards have not been tested, but should work if they have similar specifications |
| FTDI Friend + extras - v1.0 | Adafruit | 284 | Any FTDI-USB connection will work |
| Small Reduction Stepper Motor - 5VDC 32-Step 1/16 Gearing | Adafruit | 858 | Use of other stepper motors has not been tested |
| Arduino Pro 328 - 5V/16MHz | SparkFun | DEV-10915 | Other Arduino boards should work, although may require changes to the code |
| Photo Interrupter - GP1A57HRJ00F | SparkFun | SEN-09299 | Other photointerrupters will work, but may require changes to the 3D design |
| SparkFun Photo Interrupter Breakout Board - GP1A57HRJ00F | SparkFun | BOB-09322 | Other photointerrupters will work, but may require changes to the 3D design |
| Connectors, screws, and miscellaneous items | |||
| Shield stacking headers for Arduino (R3 Compatible) | Adafruit | 85 | Any stacking header that says Arduiono R3 compatible will work |
| Multi-Colored Heat Shrink Pack - 3/32" + 1/8" + 3/16" | Adafruit | 1649 | Any heatshrink will work |
| Hook-up Wire Spool Set - 22AWG Solid Core - 6x25ft | Adafruit | 1311 | Any wire will work |
| Lithium Ion Battery Pack - 3.7V 4400 mAh | Adafruit | 354 | Any 3.7 V Lithium battery with a JST connector will work |
| SD/MicroSD Memory Card (8GB SDHC) | Adafruit | 1294 | Any SD card will work |
| 50 Ohm BNC Bulkhead Jack (3/8" D-Hole) | L-com | BAC70A | Any BNC bulkhead will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 6 size, 1/4" Length | McMaster-Carr | 90184A120 | Any screws of this specification will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 2 size, 1/4" Length | McMaster-Carr | 91735A102 | Any screws of this specification will work |
| Nylon 100 Degree Flat Head Slotted Machine Screw, 4-40 Thread, 1" Length | McMaster-Carr | 90241A253 | Any screws of this specification will work |
| Nylon Hex Nut, 4-40 Thread Size | McMaster-Carr | 94812A200 | Any nut of this specification will work |
| 2 Pin JST M F Connector 200 mm 22AWG Wire Cable | NewEgg | 9SIA27C3FY2876 | Any 2 pin connector will work for this connection |
| Metal Pushbutton - Latching (16 mm, Red) | SparkFun | COM-11971 | Any push button or switch will work |
| Resistor Kit - 1/4 W | SparkFun | COM-10969 | Any 1/4 W resistors will work |
References
- Ellacott, K. L., Morton, G. J., Woods, S. C., Tso, P., Schwartz, M. W. Assessment of feeding behavior in laboratory mice. Cell Metab. 12 (1), 10-17 (2010).
- Betley, J. N., et al. Neurons for hunger and thirst transmit a negative-valence teaching signal. Nature. 521 (7551), 180-185 (2015).
- van den Heuvel, J. K., et al. Neuropeptide Y activity in the nucleus accumbens modulates feeding behavior and neuronal activity. Biol Psychiatry. 77 (7), 633-641 (2015).
- Cone, J. J., Roitman, J. D., Roitman, M. F. Ghrelin regulates phasic dopamine and nucleus accumbens signaling evoked by food-predictive stimuli. J Neurochem. 133 (6), 844-856 (2015).
- Ulman, E. A., Compton, D., Kochanek, J. Measuring food and water intake in rats and mice. ALN Mag. , 17-20 (2008).
- Nguyen, K. P., O'Neal, T. J., Bolonduro, O. A., White, E., Kravitz, A. V. Feeding Experimentation Device (FED): A flexible open-source device for measuring feeding behavior. J Neurosci Methods. 267, 108-114 (2016).
- Aguiar, P., Mendonca, L., Galhardo, V. OpenControl: a free opensource software for video tracking and automated control of behavioral mazes. J Neurosci Methods. 166 (1), 66-72 (2007).
- Devarakonda, K., Nguyen, K. P., Kravitz, A. V. ROBucket: A low cost operant chamber based on the Arduino microcontroller. Behav Res Methods. 48 (2), 503-509 (2016).
- Hoffman, A. M., Song, J., Tuttle, E. M. ELOPTA: a novel microcontroller-based operant device. Behav Res Methods. 39 (4), 776-782 (2007).
- Crall, J. D., Gravish, N., Mountcastle, A. M., Combes, S. A. BEEtag: A Low-Cost, Image-Based Tracking System for the Study of Animal Behavior and Locomotion. PLoS One. 10 (9), (2015).

{kind=link}
{kind=link}