

Introduction
Mit dem Anstieg der globalen Fettleibigkeit über den letzten Teil des 20. Jahrhunderts wird die Aufmerksamkeit zugrunde liegenden auf die Mechanismen erneuert 1 Fütterung, 2, 3, 4. Typischerweise wird die Nahrungsaufnahme manuell 5, oder mit handelsüblichen Zuführsysteme gewogen. Kommerzielle Systeme sind ausgezeichnet, aber bieten eine begrenzte Flexibilität, ihre Entwürfe oder Code zu modifizieren. Hier beschreiben wir die Fütterung Experimentation Gerät (FED): eine Open-Source - Zufuhrsystem zur Messung der Nahrungsaufnahme mit feiner zeitlicher Auflösung und minimale menschliche Eingriffe 6. FED ist batteriebetrieben und vollständig innerhalb eines 3D-Druckgehäuse enthalten, die in der Standard-Kolonie-Rack Caging oder andere wissenschaftliche Geräte passen.
In seinem stationären Zustand arbeitet FED in einem Low-Power-Modus mit einem Futterpellet ruht in seiner food gut. Das Vorhandensein des Pellets wird über einen Infrarotstrahl überwacht. Wenn eine Maus ein Pellet entfernt, sendet ein Lichtschrankensensor ein Signal an den Mikrocontroller und die Zeit-Stempel auf dem Bord Secure Digital (SD) Karte protokolliert. Gleichzeitig bietet ein Transistor-Transistor-Logik (TTL) Ausgang ein Echtzeit-Ausgabe des Pellet Retrieval. Unmittelbar nach diesem Fall dreht sich der Motor weiteren Pellets zu verzichten, und das System kehrt zu seinem Niedrigleistungsmodus. Aufgrund seiner Open-Source-Natur kann FED geändert und passen den spezifischen Forschungsbedarf verbessert werden. Beispielsweise kann der Code leicht verändert werden Fütterung zu bestimmten Zeiten des Tages zu begrenzen oder Abgabe zu stoppen, wenn eine Anzahl von Pellets wurde erreicht, ohne menschliche Eingriffe erfordern.
Hier erläutern wir den Schritt-für-Schritt-Anleitungen für den Bau, die Validierung und Anwendung von FED zur Messung der Nahrungsaufnahme bei Mäusen. Wir bieten Ihnen eine Liste aller Komponenten ein System zu konstruieren. Wichtig ist, dass keine vorherige Experience in der Elektronik benötigt FED zu konstruieren.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
Hinweis: Dieses Protokoll für Komponenten speziell in der Tabelle der Materialien genannt geschrieben wird. Während ähnliche Funktionalität kann unter Verwendung anderer Hardware erreicht werden kann, wurde FED für den Arduino Pro Mikrocontroller programmiert (im Folgenden bezeichnet: Mikrocontroller) gehandelt werden und Zubehör. Andere Mikrocontroller kann ebenso gut funktionieren, aber den Anwender auffordert, den Code zu ändern, um sie zu unterstützen. Offline-Datenanalyse wurde mit der Programmiersprache Python codiert werden.
1. Vorbereitung und Installation der Software
- Procure elektronische Bauteile benötigt , um FED konstruieren (siehe Tabelle 1 andFed Github BoM.xlxs an: https://github.com/KravitzLab/FED/tree/master/doc).
HINWEIS: Alternativ Lieferanten können für viele Teile auf dieser Tabelle verwendet werden, sofern sie zu vergleichbaren Spezifikationen aufweisen. - Drucken Sie alle 3D konstruiert sind (siehe Abbildung 1, abrufbar unter: https://github.com/KravitzLab/FED/wiki/3D-Printed-Components). 3D-Drucker mit einem 200 MikronAuflösung sollte der Druck FED fähig sein.
- Herunterladen und Installieren der Integrated Development Environment (IDE) Plattform, um den Mikrocontroller zu programmieren.
- Downloaden und installieren Sie zusätzliche Bibliotheken zu ermöglichen Funktionalität von Motorschild und Datenlogger (verfügbar unter: https://github.com/KravitzLab/fed/tree/master/fed-arduino).
- Beschaffen Sie Werkzeuge für die Montage benötigt (zB ein Lötkolben, Heißluftpistole, löten, Abisolierzange, Spitzzange, und beide Flachkopf und Schraubendreher).
2. Löten Elektrische Komponenten
HINWEIS: Verwenden Sie Schrumpfschlauch alle Lötverbindungen zu schützen. Vor der Lötverbindungen, schieben ein Stück Schrumpffolienschlauch (~ 2 cm) Schlauch um einen der Drähte. Nach dem Anschluss Löten, zentriert um den Schlauch auf den Anschlusspunkt und einer Heißluftpistole den Schlauch schrumpfen zu erwärmen verwenden.
- Vorbereitung Anschlüsse (2A)
- Bereiten Sie vier 2-poligen JST-Stecker Paare undbeschriften sowohl männliche als auch weibliche Seite "A", "B", "C" und "D" bezeichnet. Entfernen Sie den roten Draht von beiden Seiten des Verbinderpaar "D".
- Bereiten Sie einen 3-poligen JST Steckerpaar und beschriften sowohl männliche als auch weibliche Seite "E".
- Mikrocontroller und stapelbar Schilde (2B)
- Löten weibliche stapelbar Header mit Buchsen auf der Oberseite des Mikrocontrollers. Clip abstehenden Draht von Header auf der Unterseite des Mikrocontrollers.
- Solder weibliche stapelbar Header mit Buchsen auf der Oberseite der SD-Datenprotokollierung Schild. Lassen Sie Drähte an Boden der Abschirmung vorsteht.
- Löten Stiftleisten auf dem Motorschild mit Stiften aus dem Boden ragen.
- Legen Sie eine Knopfzellenbatterie in den Schlitz des SD Schild Macht der Echtzeit-Uhr-Modul zur Verfügung zu stellen.
- Externe Netzschalter (Abbildung 2C)
HINWEIS: Ein Rastmetalltaster has fünf Anschlüsse: Leistung, Masse normalerweise geschlossen (NC1), Schließer (NO1) und gemeinsame (C1).- Löten Sie den 2-poligen Stecker "A" bis C1 (Verwendung roter Draht) und Boden (Verwendung schwarzer Draht). Schrumpf alle Verbindungen.
- Löten Sie den 2-poligen Stecker "B" + (Verwendung roter Draht) und NO1 (Verwendung schwarzer Draht). Schrumpf alle Verbindungen.
- Photointerrupter (2D)
- Solder Photounterbrechers (der schwarze Teil) Breakout Board.
- Dazu wird ein 4.7K Widerstand an der Vorderseite des Breakout-Board.
- Löten Sie den Stecker 3-poliger Stecker "E" auf der Rückseite des Breakout-Board: rote Kabel an PWR, grünen Draht an GND und weiße Kabel an SGL.
- Schneiden Sie lose Drähte auf der Rückseite der Lichtschranke durchbrechen Bord.
- Boost - Board (Abbildung 2E)
- Löten Sie die 2-polige Buchse "A" bis 5 V und Masse-Pins auf der Boost-Board.
- Löten Sie den schwarzen Draht von male-Stecker "D" auf die zusätzliche GND-Pin auf der Boost-Board.
- BNC - Ausgangskabel (optional: 2F)
- Löten Sie den 2-poligen Stecker "C" zu den Anschlüssen eines BNC-Kabel (roter Draht zum Mittelstift, schwarzer Draht nach außen polig).
HINWEIS: Für die Montage der 2-poligen Stecker muss auf dem BNC-Stecker durch die Mutter passen. Wir verwenden einen kleineren Stecker oder rasieren Sie die JST-Stecker mit einer Rasierklinge, um es fit zu machen.
- Löten Sie den 2-poligen Stecker "C" zu den Anschlüssen eines BNC-Kabel (roter Draht zum Mittelstift, schwarzer Draht nach außen polig).
- Motor Shield (2G)
- Drehen Sie die roten und schwarzen Kabel des weiblichen Verbindungs "B" zusammen und Lot zu V in.
- Löten Sie den schwarzen Draht des weiblichen Verbinders "C" zu dem Erdungsstift neben ARef, und der rote Draht dieses Anschlusses an Pin 3.
- Löten Sie den schwarzen Draht des weiblichen Verbinders "D" zu dem Erdungsstift neben V in.
- Löten Sie den grünen Draht des weiblichen Verbinders "E" auf dem Erdungsstiftneben 5V, das rote Kabel von diesem Anschluss 5V, und das weiße Kabel von diesem Anschluss an Pin 2.
3. Software hochladen
- Schließen Sie den FTDI Breakout-Board an die Programmierung Pins des Mikrocontrollers, und schließen Sie dann FTDI Breakout-Board an den Computer über Micro-USB-Kabel.
- Öffnen Sie die IDE (Integrated Development Environment) Programm.
- Wählen Sie den richtigen Mikrocontroller-Board für Software-Upload über Extras> Brett Dropdown-Menü.
- Wählen Sie ATMega 328 (5 V, 16 MHz) über die Tools> Prozessor-Menü.
- Wählen Sie den Port, den der Mikrocontroller verbunden ist Tools durch> Port> COM # (variiert je nachdem, welcher Port befindet sich derzeit in Gebrauch).
- Klicken Sie auf den "Upload", um die FED Skizze auf dem Brett zu laden (verfügbar unter: https://github.com/KravitzLab/fed/tree/master/fed-arduino).
4. Hardware-Montage
- Schrittmotor und mOTOR Abschirmung (Figuren 1C und 3A und 3B)
- Befestigen Sie den 5V - Schrittmotor auf den 3D - Druck Motorhalterung mit zwei # 6 x ¼ "blech Schrauben (1C und 3A).
- Setzen Sie sich drehende Scheibe in die Motorhalterung und drücken Sie fest mit Schrittmotorwelle (3B) zu befestigen.
- Twist auf 3D gedruckt Lebensmittel Silo auf die Motorhalterung das Pellet Leveler Arm ist über das Loch in der Motorhalterung sicherstellen.
- Twist auf verbundenen Stücke von oben (Schritte 4.1.1 - 4.1.3) auf die Oberseite der gedruckten Basis, mit dem Schrittmotor in Richtung der Rückseite der Basis positioniert und das Loch in der Front positioniert.
- Schneiden Sie den 5-poligen Stecker von den Schrittmotor Drähte und Bänder ~ 2 mm vom Ende jedes Drahtes.
- Schließen Sie Drähte von Schrittmotor an den Klemmenblock - Anschlüsse auf der Motorschild: rot zu Boden, orange und rosa auf einem Motoranschluss (zB M1) und Blau und Gelb auf den anderen mOTOR Port (zB M2).
- Externe Netzschalter
- Entfernen Sie die Mutter von der Power-Taste und legen Sie die Power-Taste in das Loch in der rechten Seite der Basis. Sichere Taste an der Stelle mit Sechskantmutter.
- Photounterbrechers (3C)
- Platzieren Sie die Lichtschranke in die 3D-Druckgehäuse.
HINWEIS: eine Heißluftpistole verwenden Sie das Gehäuse zu erwärmen, wenn die Lichtschranke nicht den ganzen Weg nicht Platz in. - String die 3-Pin-Stecker "E" von der Lichtschranke (PWR, GND und SGL) durch die vordere mittlere Loch der gedruckten 3D-Basis.
- Befestigen Sie das Gehäuse in die FED Basis mit zwei 1 "Nylon Schrauben und entsprechenden Muttern.
- Platzieren Sie die Lichtschranke in die 3D-Druckgehäuse.
- BNC - Ausgangskabel (optional)
- Legen Sie BNC-Stecker in das Loch auf der linken Seite des FED-Basis. Befestigen Sie an Ort und Stelle mit der Mutter.
- Wenn BNC-Anschluss nicht verwendet wird, stecken Loch mit 3D-Druck-Stecker.
- Batterie und Boost - Board (3D)
- Schließen Sie 3,7 V Akkupacks an den DC / DC-Boost-Wandler-Modul über den JST 2-Pin-Anschluss. Die blaue LED auf der Boost-Board leuchtet auf, wenn der Akku geladen wird.
- Montageplatten im Inneren des Gehäuses (Abbildung 3E)
- Berg Mikrocontroller innerhalb der Basis mit FTDI Verbindungen den Netzschalter gegenüber, mit # 4 x ¼ "Stahlblechschrauben.
- Stack-Motorschild und Datenprotokollierung Schild auf dem Microcontroller.
- Schrauben Sie den Boost-Platine in den Fall mit # 2 x ¼ "Stahlblechschrauben. Montage-Boost mit der Micro-SD-Steckplatz nach unten zeigt. FED kann ohne Öffnen des Gehäuses über diesen Port aufgeladen werden.
- Schließen Sie die fünf Anschlüsse, "A" Stecker auf "A" weiblich, "B" Stecker auf "B" weiblich, usw.
- Setzen Sie den Akku in der 3D-Druck Basis und in der Nähe der hinteren Abdeckung gleitet. Schieben Sie auf der 3D-gedruckten Frontplatte.
5. Validierung und Datenerfassung
HINWEIS: Vor auf einer FED-System einschalten, stellen Sie sicher eine SD-Karte auf der SD-Abschirmung eingesetzt ist, sonst FED nicht Pellets verzichten. Zusätzlich Strombrücke auf der Motorschild (knapp über dem Powerblock) an Ort und Stelle zu gewährleisten.
- Power on FED - System mit dem Netztaster und Testgerätefunktionalität.
- Füllen Sie Lebensmittel Silo mit 20 mg Futterpellets vor dem Einschalten.
HINWEIS: Der Netzschalter sollte aufleuchten, wie sollten LEDs auf dem Mikrocontroller, SD Schild und Motorschild. Wenn kein Pellet in der gut ist, sollte man verzichten. - Entfernen Sie manuell von 5 bis 10 Pellets aus der Nahrung gut und bestätigen, dass die Ersatz Pellets abgegeben werden.
- Füllen Sie Lebensmittel Silo mit 20 mg Futterpellets vor dem Einschalten.
- Entfernen Sie die SD-Karte und überprüfen wurde, dass die Daten ordnungsgemäß protokolliert. Die Daten sind in einer durch Komma getrennten Wert erworben werden (.csv) mit dem Namen nach dem variable Dateinamen im Code.
- Legen Sie FED Einheit innerhalb experimentell zu untersuchen, Energie an, und stellen Sie sicher, dass ein Pellet in die Nahrung gut abgegeben wird.
- Im Laufe der Datenerfassung, FED täglich überprüfen, um sicherzustellen, dass sie richtig durch die Bestätigung arbeitet, dass das LED-Licht auf der Netzschalter eingeschaltet ist (dies zeigt an, dass die Batterie ausreichend geladen ist) in der Nahrung gut und ein Pellet sitzt (zeigt dass es keine Probleme mit Pelletabgabe).
- Nach der Datenerfassung, SD-Karte und Zugang CSV-Datei abgerufen werden.
HINWEIS: Die Analyse-Skripte für Mahlzeiten und Muster der Fütterung sind verfügbar unter: https://github.com/KravitzLab/fed.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Validierungstests die Verwendung von Tieren beteiligt sind, wurden von der Animal Care und Use Committee am National Institute of Diabetes und Magen-Darm-und Nierenerkrankungen, geprüft und genehmigt. Um die Verwendung von FED demonstrieren zur Messung Käfig Fütterung, erwachsene weibliche C57BL / 6 - Mäuse (n = 4) wurden einzeln mit ad libitum Zugang zu Wasser und Standard - Laborfutter unter einem 12/12 h Hell / Dunkel - Zyklus gehalten (Licht an bei 05.00). Nach einer Woche Gewöhnungsperiode wurde die Futterraufe entfernt und für fünf Tage Validierungstests mit einer FED ersetzt. Am Ende des Testzeitraums wurden FEDs aus den Käfigen und Fütterungsdaten entfernt von jeder SD-Karte analysiert individuelle Verwendung frei verfügbaren Skripten und ein Tabellenkalkulationsprogramm. Wie in 4A, Pellet - Retrieval für einzelne Mäuse gezeigt (oben; Rastern einzelne Pellet Retrieval Ereignisse zeigen) und die durchschnittliche Pellet Abruf über alle Mäuse in 30 min bins (bottom Panel; Linie zeigt ± SEM Mittelwert) für die Validierung Testzeitraum kontinuierliche Zuführung zeigen, mit deutlich sichtbar gemacht zirkadianen Rhythmik. Zur Quantifizierung wurde die Genauigkeit der FED Datenerfassungskapazität jedes FED-System 1000-Pellets für die Validierung Testphase gegeben und die verbleibenden Pellets wurden manuell gezählt und im Vergleich zu der aufgezeichneten Daten auf der SD-Karte. FED angemeldet 95,35 ± 1,25% der Pellets, die auf der SD - Karte (4B) abgegeben wurden.

Abbildung 1: 3D - Designed FED - Komponenten. (A) Die Messungen der montierten FED. (B) Explosions von gedruckten 3D - Komponenten in einem zusammengebauten FED. (C) Explosions kompletter Pelletsbox Montage (links), die Montage des Schrittmotors zu rotierenden Scheibe (Mitte) und Montage von Lebensmitteln Silo rotierenden Scheibe (rechts). (D) Entwurf der Nahrung gut mit den Armen , die Lichtschranke für die Pellet Erkennung zu sichern. (E) Foto von komplett montierten FED. Bitte klicken Sie hier , um eine größere Version dieser Figur zu sehen.

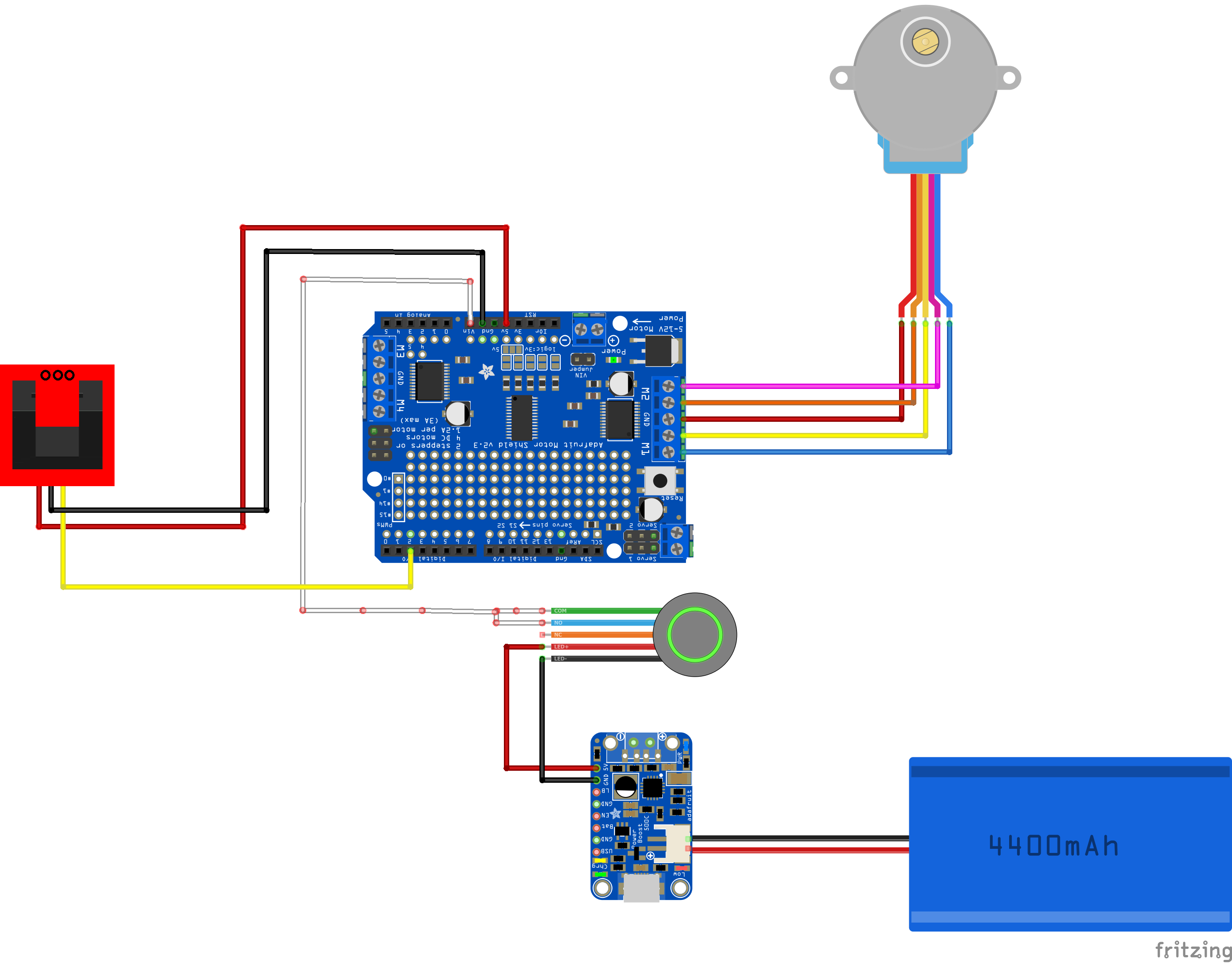
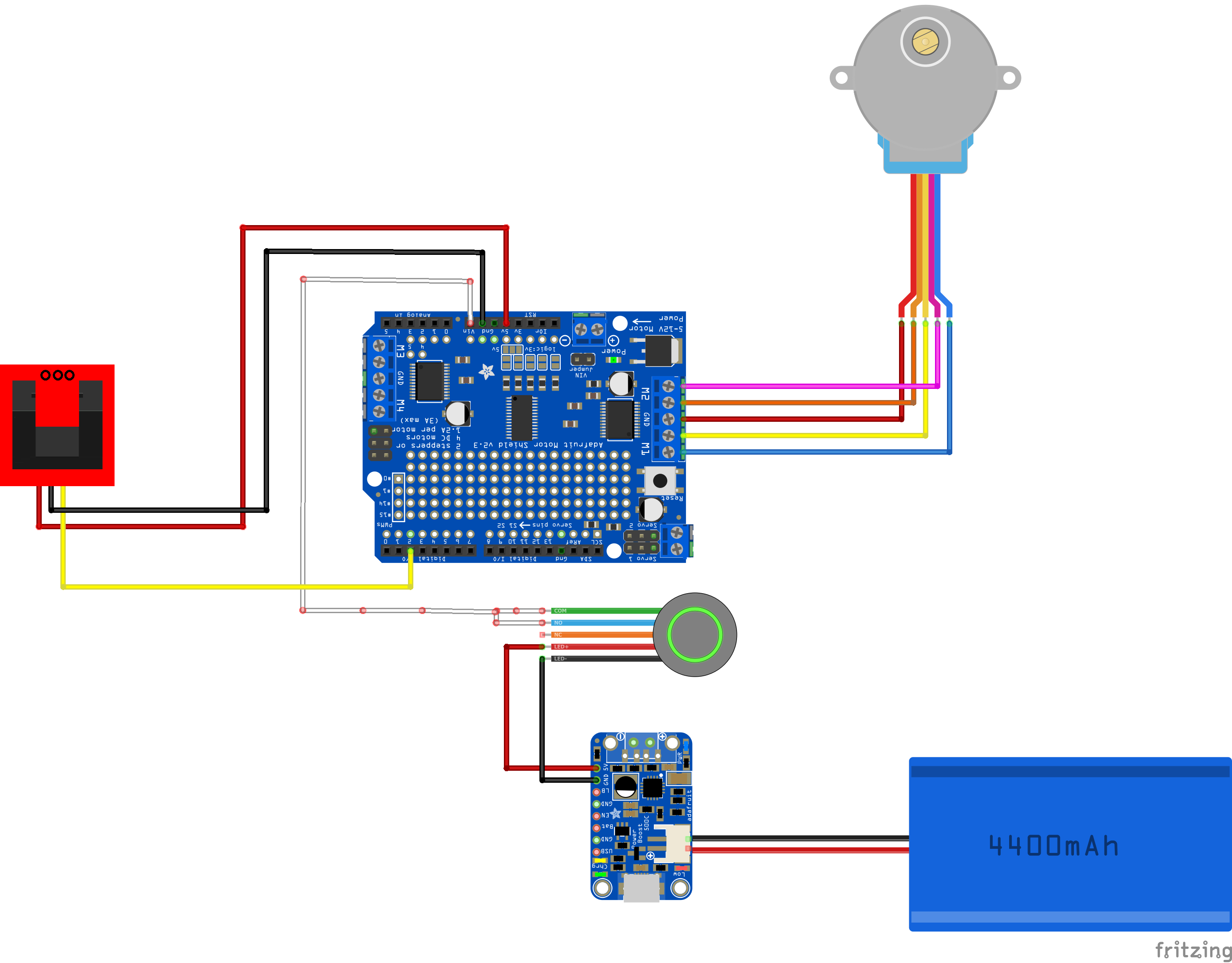
Abbildung 2: Verdrahtung der FED Elektrische Komponenten. Verdrahtung und Montage von (A) Anschlüsse (B) Mikrocontroller, Datenerfassung / SD Schild, Motorschild, (C) Power - Taste, (D) Photointerrupter, (E) Boost - Board, (F) BNC - Ausgangskabel, (G) Verdrahtung von Motorschild. Bitte klicken Sie hier , um eine größere Version zu sehendiese Figur.

Abbildung 3: Montage der FED Hardware. (A) Montageschrittmotor (links) in Motorhalterung und Befestigungspellet Scheibe (rechts). (B) Verdrahtung Schrittmotor Motorschild. (C) einlegen Photounterbrechers in 3D gedruckt Gehäuse. (D) Anbringen Batterie - Board zu erhöhen. (E) Boards innerhalb FED Gehäuse montiert. Bitte klicken Sie hier , um eine größere Version dieser Figur zu sehen.

Abbildung 4: Repräsentative Daten Nahrungsaufnahme über FED gesammelt. (A) Die Nahrungsaufnahme Daten gesammelt über FED und visualisiert Open-Source - Analyse - Skripte verwenden. Oben: Einzelrastern einzelne Pellet Retrieval Ereignisse zeigen, mit Zeilen mit einzelnen Mäusen. Bodenplatte: Linie zeigt über Mäuse ± SEM der Nahrungsaufnahme bedeuten (n = 4). (B) Die Genauigkeit der einzelnen FED - Einheiten in die Protokollierung verzichtet Pellets. Farben entsprechen mit Rastern in 3A. Bitte klicken Sie hier , um eine größere Version dieser Figur zu sehen.

Abbildung 5: Modifizierte Verwendungen für FED. (A) außen angebrachte FED Bodenfläche in Nagerkäfigen reduziert. (B) Ändern der frontseitige Konfiguration ermöglicht die Zugabe von zwei Nase Poke - Ports für operant Training.ve.com/files/ftp_upload/55098/55098fig5large.jpg "target =" _ blank "> Bitte hier klicken, um eine größere Version dieser Figur zu sehen.
Ergänzende Datei 1: Hardware Schematic. Grafik-Schema, das die elektronischen Verbindungen der FED zeigt. Bitte klicken Sie hier , um diese Datei herunterzuladen.
Supplemental File 2: Beispielausgabecode. Beispiel CSV-Datei von FED zeigt Ausgabecode. Bitte klicken Sie hier , um diese Datei herunterzuladen.
Zusatzdateien 3-6: Analyse Scripts. Vier Analyse-Skripte für die Analyse von FED-Daten zur Verfügung gestellt: eating_rate.py, meals.py, meal_bars.py und plotmice.py. Eingangsparameter und Beschreibung liefernd in den kommentierten Abschnitte an der Spitze jedes Skript. Bitte klicken Sie hier , um diese Datei herunterzuladen.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Die Fütterung Experimentation Gerät (FED) ist eine flexible Nahrungsaufnahme-Monitoring-System. Hier beschreiben wir detaillierte Anweisungen zur Herstellung und zur Fehlerbehebung des Geräts, einschließlich der Montage von gedruckten 3D-Hardware, Löten von elektrischen Komponenten, und das Hochladen von Skizzen auf den Mikrocontroller. Obwohl es wichtig ist, alle Schritte in dem Protokoll skizzierten folgen sorgfältig, gibt es wichtige Schritte, die in jedem Abschnitt besondere Aufmerksamkeit verdienen ein erfolgreiches Endprodukt zu gewährleisten. Die 3D-Druckplattendreh sollte eng auf den Schrittmotorwelle passen und mit minimalem Widerstand aus den benachbarten Teilen zu drehen können. Wenn Stiftverbindungen Löten, achten Sie darauf, dass die Lötstelle ohne Lötreste sicher ist. Stellen Sie sicher, dass alle installierten zusätzlichen Bibliotheken müssen im richtigen Verzeichnis befinden, bevor Sie das Skript auf den Mikrocontroller hochzuladen. Der Prozess FED der Montage beinhaltet Aufgaben, die leicht erreichbar sind, auch ohne vorherigeErfahrung in der 3D-Druck oder Elektronik.
Es gibt nur wenige Einschränkungen mit FED. Erstens verwendet jeder FED eine interne SD-Karte zu protokollieren und zu speichern. SD-Karten kann ein schwerfälliges Mittel sein, zu verfolgen und zu speichern Daten aus vielen FEDs. Wir erforschen die drahtlose Datenübertragung um dieses Problem zu lindern, aber die aktuelle Iteration der FED stützt sich auf die lokale Speicherung auf SD-Karten. Zweitens ~ 5% der Zeit FED verzichtet zwei Pellets statt einer. Während Pellet Staus in unseren Händen mit genügend Frequenz nicht aufgetreten sind, zu zählen, sollte diese Möglichkeit streng überwacht werden, da wir sie nicht ausschließen können, vollständig. Benutzer sollten niemals Funktionalität des FED-Mäuse mit FED als ihre einzige Nahrungsquelle verlassen täglich, ohne zu überprüfen. Trotz dieser Einschränkungen glauben wir FED Fehlerrate für die meisten Studien akzeptabel ist. Das heißt, in Zukunft arbeiten wir diese Fehler weiter verringern wird versuchen, zu. Schließlich kann die Toleranz von 3D-Druck in Abhängigkeit von der spezifischen 3D-Drucker und Material variieren. Wieso können die 3D-Design-Dateien, die wir zur Verfügung stellen müssen, für den Druck auf andere Modelle der 3D-Drucker, oder mit anderen Materialien zu gezwickt. Als ein hilfreicher Tipp haben wir können, dass eine Heißluftpistole nach dem Drucken von 3D verwendet werden, gefunden bedruckten Teile für kleinere Anpassungen zu erweichen.
Ein einzelnes FED kann für etwa $ 350 zusammengebaut werden. Von diesem Preis schätzen wir $ 200 für kommerzielle 3D-Druck aus PLA Material ~ und ~ 150 $ die elektronischen Komponenten für den Kauf. 3D-Druckkosten auf die Qualität und Material stark variieren. Es ist möglich, diese Kosten erheblich zu reduzieren, wenn ein Benutzer seine eigenen Teile druckt. FED könnte auch aus haltbarere Materialien wie Edelstahl oder Aluminium gedruckt oder maschinell bearbeitet werden, obwohl dies teurer sein würde.
Wir entschieden uns für FED mit einem Mikrocontroller auf einem programmierbaren Leiterplatte mit einer Open-Source-Plattform zu bauen. Dazu wählten wir die Open - Source - Mikrocontroller (Tabelle der Materialien sehen) , da es eine hatniedrige Leistungsaufnahme. Allerdings sollte unser Code auf jeder Platine arbeiten, die ausreichend Eingangs- / Ausgangs-Pins hat. Ändern Mikrocontroller-Boards wird wahrscheinlich erfordern kleinere Änderungen an dem Code. Wir stellen alle Design-Dateien und Code online, und unser Design ist Open-Source-Forscher mit Flexibilität zu bieten FED zu ändern, um ihre Bedürfnisse anzupassen, einschließlich der Verwendung anderer Mikrocontroller-Boards.
Es gibt einen wachsenden Trend hin zu Open-Source-Hardware für die wissenschaftliche Forschung. Verschiedene Gruppen haben Open-Source - Geräte für neurowissenschaftliche Forschung gemacht, darunter Opencontrol, eine Software für Video - Tracking - Tiere während des Verhaltens Aufgaben 7; ROBucket, ein Arduino-basierte operant Kammer für flüssige Ergebnis Lieferung 8; ELOPTA, ein PICmicro-basierte operant Gerät für Pellet Ergebnis Lieferung 9; und BEEtag, ein bildbasiertes Tracking - System für Hummeln 10. FED ergänzt diese mit seiner einzigartigen Formfaktor und low Kosten. Ein wichtiges Ziel für die FED war, um es Open-Source. Open-Source-Hardware ermöglicht es den Forschern kleinere Verbesserungen an Designs (zum Beispiel die Abmessungen zu ändern) zu erfüllen, aber ist besonders leistungsfähig, wenn die Benutzer größere Änderungen durchführen, die Funktionalität der Hardware zu erweitern. Zum Beispiel ist es ziemlich einfach , die Konstruktion von FED zum Anbau an einem Käfig zu modifizieren, die beide schützt FED und erhöht die Bodenfläche innerhalb des Käfigs (5A). Zusätzlich entwarfen wir FED Raum für Nase-Pokes auf jeder Seite der Fütterung gut für operant Ausbildung haben, und haben diese erfolgreich mit geringen Konstruktionsänderungen (5B) umgesetzt. Wir geben solche Entwicklungen auf unserer Website (https://github.com/KravitzLab/fed), wo wir freuen uns darauf, auch andere solche Verbesserungen aus der Forschung bis hin zum Hosting.
Subscription Required. Please recommend JoVE to your librarian.
Acknowledgments
Diese Arbeit wurde durch die Interne Research Program der National Institutes of Health (NIH), The National Institute of Diabetes und Magen-Darm-und Nierenerkrankungen (NIDDK) unterstützt. Wir danken der NIH Abschnitt auf Besetzung und die NIH-Bibliothek für die Unterstützung bei den 3D-Druck.
Materials
| Name | Company | Catalog Number | Comments |
| Electronics | |||
| Adafruit Motor/Stepper/Servo Shield for Arduino v2 Kit - v2.3 | Adafruit | 1438 | Use of other motor shields has not been tested and will require changes to the code |
| Adafruit Assembled Data Logging shield for Arduino | Adafruit | 1141 | Use of other data logging shields has not been tested and will require changes to the code |
| PowerBoost 500 Charger | Adafruit | 1944 | Other voltge regulator boards have not been tested, but should work if they have similar specifications |
| FTDI Friend + extras - v1.0 | Adafruit | 284 | Any FTDI-USB connection will work |
| Small Reduction Stepper Motor - 5VDC 32-Step 1/16 Gearing | Adafruit | 858 | Use of other stepper motors has not been tested |
| Arduino Pro 328 - 5V/16MHz | SparkFun | DEV-10915 | Other Arduino boards should work, although may require changes to the code |
| Photo Interrupter - GP1A57HRJ00F | SparkFun | SEN-09299 | Other photointerrupters will work, but may require changes to the 3D design |
| SparkFun Photo Interrupter Breakout Board - GP1A57HRJ00F | SparkFun | BOB-09322 | Other photointerrupters will work, but may require changes to the 3D design |
| Connectors, screws, and miscellaneous items | |||
| Shield stacking headers for Arduino (R3 Compatible) | Adafruit | 85 | Any stacking header that says Arduiono R3 compatible will work |
| Multi-Colored Heat Shrink Pack - 3/32" + 1/8" + 3/16" | Adafruit | 1649 | Any heatshrink will work |
| Hook-up Wire Spool Set - 22AWG Solid Core - 6x25ft | Adafruit | 1311 | Any wire will work |
| Lithium Ion Battery Pack - 3.7V 4400 mAh | Adafruit | 354 | Any 3.7 V Lithium battery with a JST connector will work |
| SD/MicroSD Memory Card (8GB SDHC) | Adafruit | 1294 | Any SD card will work |
| 50 Ohm BNC Bulkhead Jack (3/8" D-Hole) | L-com | BAC70A | Any BNC bulkhead will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 6 size, 1/4" Length | McMaster-Carr | 90184A120 | Any screws of this specification will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 2 size, 1/4" Length | McMaster-Carr | 91735A102 | Any screws of this specification will work |
| Nylon 100 Degree Flat Head Slotted Machine Screw, 4-40 Thread, 1" Length | McMaster-Carr | 90241A253 | Any screws of this specification will work |
| Nylon Hex Nut, 4-40 Thread Size | McMaster-Carr | 94812A200 | Any nut of this specification will work |
| 2 Pin JST M F Connector 200 mm 22AWG Wire Cable | NewEgg | 9SIA27C3FY2876 | Any 2 pin connector will work for this connection |
| Metal Pushbutton - Latching (16 mm, Red) | SparkFun | COM-11971 | Any push button or switch will work |
| Resistor Kit - 1/4 W | SparkFun | COM-10969 | Any 1/4 W resistors will work |
References
- Ellacott, K. L., Morton, G. J., Woods, S. C., Tso, P., Schwartz, M. W. Assessment of feeding behavior in laboratory mice. Cell Metab. 12 (1), 10-17 (2010).
- Betley, J. N., et al. Neurons for hunger and thirst transmit a negative-valence teaching signal. Nature. 521 (7551), 180-185 (2015).
- van den Heuvel, J. K., et al. Neuropeptide Y activity in the nucleus accumbens modulates feeding behavior and neuronal activity. Biol Psychiatry. 77 (7), 633-641 (2015).
- Cone, J. J., Roitman, J. D., Roitman, M. F. Ghrelin regulates phasic dopamine and nucleus accumbens signaling evoked by food-predictive stimuli. J Neurochem. 133 (6), 844-856 (2015).
- Ulman, E. A., Compton, D., Kochanek, J. Measuring food and water intake in rats and mice. ALN Mag. , 17-20 (2008).
- Nguyen, K. P., O'Neal, T. J., Bolonduro, O. A., White, E., Kravitz, A. V. Feeding Experimentation Device (FED): A flexible open-source device for measuring feeding behavior. J Neurosci Methods. 267, 108-114 (2016).
- Aguiar, P., Mendonca, L., Galhardo, V. OpenControl: a free opensource software for video tracking and automated control of behavioral mazes. J Neurosci Methods. 166 (1), 66-72 (2007).
- Devarakonda, K., Nguyen, K. P., Kravitz, A. V. ROBucket: A low cost operant chamber based on the Arduino microcontroller. Behav Res Methods. 48 (2), 503-509 (2016).
- Hoffman, A. M., Song, J., Tuttle, E. M. ELOPTA: a novel microcontroller-based operant device. Behav Res Methods. 39 (4), 776-782 (2007).
- Crall, J. D., Gravish, N., Mountcastle, A. M., Combes, S. A. BEEtag: A Low-Cost, Image-Based Tracking System for the Study of Animal Behavior and Locomotion. PLoS One. 10 (9), (2015).

{kind=link}
{kind=link}