

Introduction
Con el aumento de la obesidad global durante la última parte del siglo 20, se ha renovado la atención en los mecanismos que subyacen a la alimentación de 1, 2, 3, 4. Típicamente, la ingesta de alimentos se pesa manualmente 5, o con sistemas de alimentación comercialmente disponibles. Los sistemas comerciales son excelentes, pero proporcionan una flexibilidad limitada en la modificación de sus diseños o código. A continuación, se describe el dispositivo de alimentación de Experimentación (FED): un sistema de alimentación de código abierto para la medición de la ingesta de alimentos con resolución temporal fina y una mínima interferencia humana 6. FED es alimentado por batería y totalmente contenida dentro de una caja impresa en 3D que puede caber dentro de las jaulas estante colonias estándar u otro equipo científico.
En su estado estacionario, FED opera en un modo de bajo consumo con una bolita de comida en reposo en su food bien. La presencia de la pastilla se controla a través de un haz de luz infrarroja. Cuando un ratón elimina una pastilla, un sensor Photointerrupter envía una señal al microcontrolador y el sello de tiempo se registra en la tarjeta a bordo Secure Digital (SD). Al mismo tiempo, una salida lógica transistor-transistor (TTL) proporciona una salida en tiempo real de recuperación de gránulos. Inmediatamente después de este evento, el motor gira para dispensar otra pastilla, y el sistema vuelve a su modo de bajo consumo. Debido a su naturaleza de código abierto, FED puede ser modificado y mejorado para adaptarse a las necesidades específicas de investigación. Por ejemplo, el código puede ser fácilmente alterado para limitar la alimentación a horas específicas del día, o para detener el suministro cuando se ha alcanzado un número de pastillas, sin requerir la intervención humana.
A continuación, describimos las instrucciones paso a paso para la construcción, validación y uso de la FED para medir la ingesta de alimentos en ratones. Proporcionamos una lista de todos los componentes para la construcción de un sistema. Es importante destacar que, sin previo retroactivoSe necesita riencia en la electrónica para la construcción de la FED.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
NOTA: Este protocolo está escrito para los componentes denominados específicamente en la Tabla de Materiales. Mientras funcionalidad similar puede conseguirse utilizando otro hardware, FED se programó para el microcontrolador Arduino Pro (en adelante denominado: microcontrolador) y accesorios indicados. Otros microcontroladores pueden funcionar igual de bien, pero requerirá que el usuario modifique el código para apoyarlos. análisis de datos fuera de línea se codifica usando el lenguaje de programación Python.
1. Preparación e instalación del software
- Adquirir los componentes electrónicos necesarios para construir FED (véase la Tabla 1 andFed Github BoM.xlxs en: https://github.com/KravitzLab/FED/tree/master/doc).
NOTA: los proveedores alternativos se pueden utilizar para muchas partes de esta tabla, siempre que tengan especificaciones equivalentes. - Imprimir todos los componentes diseñados 3D (Figura 1, disponible en: https://github.com/KravitzLab/FED/wiki/3D-Printed-Components). Las impresoras 3D con un micrón 200resolución debe ser capaz de imprimir FED.
- Descargar e instalar la plataforma de entorno de desarrollo integrado (IDE) para programar el microcontrolador.
- Descargar e instalar librerías adicionales para habilitar la funcionalidad del escudo del motor y registrador de datos (disponible en: https://github.com/KravitzLab/fed/tree/master/fed-arduino).
- Adquirir herramientas necesarias para el montaje (por ejemplo, un soldador, pistola de aire caliente, soldadura, pelacables, alicates de punta fina, y ambos de cabeza plana y destornilladores).
2. Componentes eléctricos para soldar
NOTA: Utilice la tubería termoencogible para proteger a todas las uniones soldadas. Antes de conexiones de soldadura, deslice un pedazo de tubo de plástico de embalar (~ 2 cm) de manguera alrededor de uno de los cables. Después de soldar la conexión, centrar la tubería en el punto de conexión y el uso de una pistola de calor para calentar el tubo retráctil.
- Conectores de Preparación (Figura 2A)
- Preparar cuatro pares de conectores JST de 2 polos yetiquetar "A" Ambas partes macho y hembra, "B", "C" y "D", respectivamente. Retire el cable rojo de ambos lados del par de conectores "D".
- Preparar un par JST conector de 3 pines y etiquetar ambos lados masculinos y femeninos "E".
- Microcontroladores y apilables escudos (Figura 2B)
- Soldar cabeceras apilables femeninas con tomas de corriente en el lado superior del microcontrolador. Clip sobresale alambre de cabeceras en la parte inferior del microcontrolador.
- Soldadura femenina cabeceras apilables con tomas de corriente en la parte superior de la pantalla de registro de datos SD. Deja que sobresale cables en la parte inferior de la pantalla.
- Soldar los conectores macho en el protector del motor con los pernos que sobresalen de la parte inferior.
- Coloque una batería de tipo botón en la ranura del protector SD para proporcionar alimentación al módulo de reloj en tiempo real.
- Botón de alimentación externa (Figura 2C)
NOTA: Un pulsador de enganche de metal jas cinco conexiones: energía, la tierra, normalmente cerrado (NC1), normalmente abierto (NO 1), y comunes (C1).- Soldar el conector de 2 pines macho "A" a C1 (uso cable rojo) y el suelo (usar cable negro). Termorretráctil todas las conexiones.
- Soldar el 2-pin conector macho "B" a + (uso cable rojo) y NO1 (utilizar cable negro). Termorretráctil todas las conexiones.
- Photointerrupter (Figura 2D)
- Photointerrupter de soldadura (la parte en negro) a la evasión bordo.
- Soldar una resistencia de 4.7K a la parte delantera del tablero del desbloqueo.
- Soldar el macho de 3 pines del conector "E" de la parte posterior del tablero del desbloqueo: cable rojo a PWR, cable verde a GND, y el cable blanco a SGL.
- Corte los cables sueltos en la parte posterior de Photointerrupter romper el tablero.
- Tablero de impulso (Figura 2E)
- Soldar el 2-pin conector hembra "A" a los pines de 5V y tierra en el tablero de impulso.
- Soldar el cable negro de maLe conector "D" para el pin GND adicional en la placa de refuerzo.
- Cable de salida BNC (opcional: Figura 2F)
- Soldar el conector de 2 patillas "C" para los terminales de un cable BNC (cable rojo al pin central, cable negro al pin exterior).
NOTA: Para el montaje, el conector de 2 pines debe pasar a través de la tuerca en el conector BNC. Utilizamos un conector más pequeño, o rasura el conector JST con una hoja de afeitar para que se ajuste.
- Soldar el conector de 2 patillas "C" para los terminales de un cable BNC (cable rojo al pin central, cable negro al pin exterior).
- Escudo del motor (Figura 2G)
- Retuerza los cables rojo y negro del conector hembra "B" juntos y soldadura en V.
- Soldar el cable negro del conector hembra "C" para el conector de tierra junto a Aref, y el cable rojo de este conector a la clavija 3.
- Soldar el cable negro del conector hembra "D" para el conector de tierra al lado de V en.
- Soldar el cable verde del conector hembra "E" para el conector de tierrajunto a 5V, el cable rojo de este conector a 5V, y el cable blanco de este conector al terminal 2.
3. Carga de software
- Conectar el tablero del desbloqueo de FTDI a los pines de programación del microcontrolador, y luego conectar tablero del desbloqueo de FTDI al ordenador mediante un cable micro USB.
- Abra el programa IDE (entorno de desarrollo integrado).
- Seleccione la placa electronica correcta para la carga de software a través de Herramientas> menú desplegable Junta.
- Seleccionar ATMega 328 (5 V, 16 MHz) a través del menú Herramientas> Procesador.
- Seleccione el puerto que el microcontrolador está conectado a través de herramientas> Puerto> COM # (variará dependiendo de qué puerto está actualmente en uso).
- Haga clic en el botón "Subir" para subir el boceto FED a la placa (disponible en: https://github.com/KravitzLab/fed/tree/master/fed-arduino).
4. Accesorios de ensamblaje
- Motor paso a paso ymotor escudo (figuras 1C y 3A y 3B)
- Asegure el motor paso a paso 5V en el 3D impreso de montaje del motor con dos # 6 x ¼ "tornillos de chapa (figuras 1C y 3A).
- Insertar la rotación de disco en soporte de motor y empuje hacia abajo para fijar firmemente al eje del motor paso a paso (Figura 3B).
- Giro en 3D silo de alimentos impresa sobre la montura de motor asegurándose de que el brazo de pellets es nivelador sobre el orificio de montaje del motor.
- Giro en piezas conectadas desde arriba (pasos 4.1.1 - 4.1.3) a la parte superior de la base impresa, con el motor paso a paso posicionado hacia la parte posterior de la base y el orificio situado en la parte delantera.
- Cortar el conector de 5 pines de los cables del motor paso a paso y tiras ~ 2 mm del extremo de cada cable.
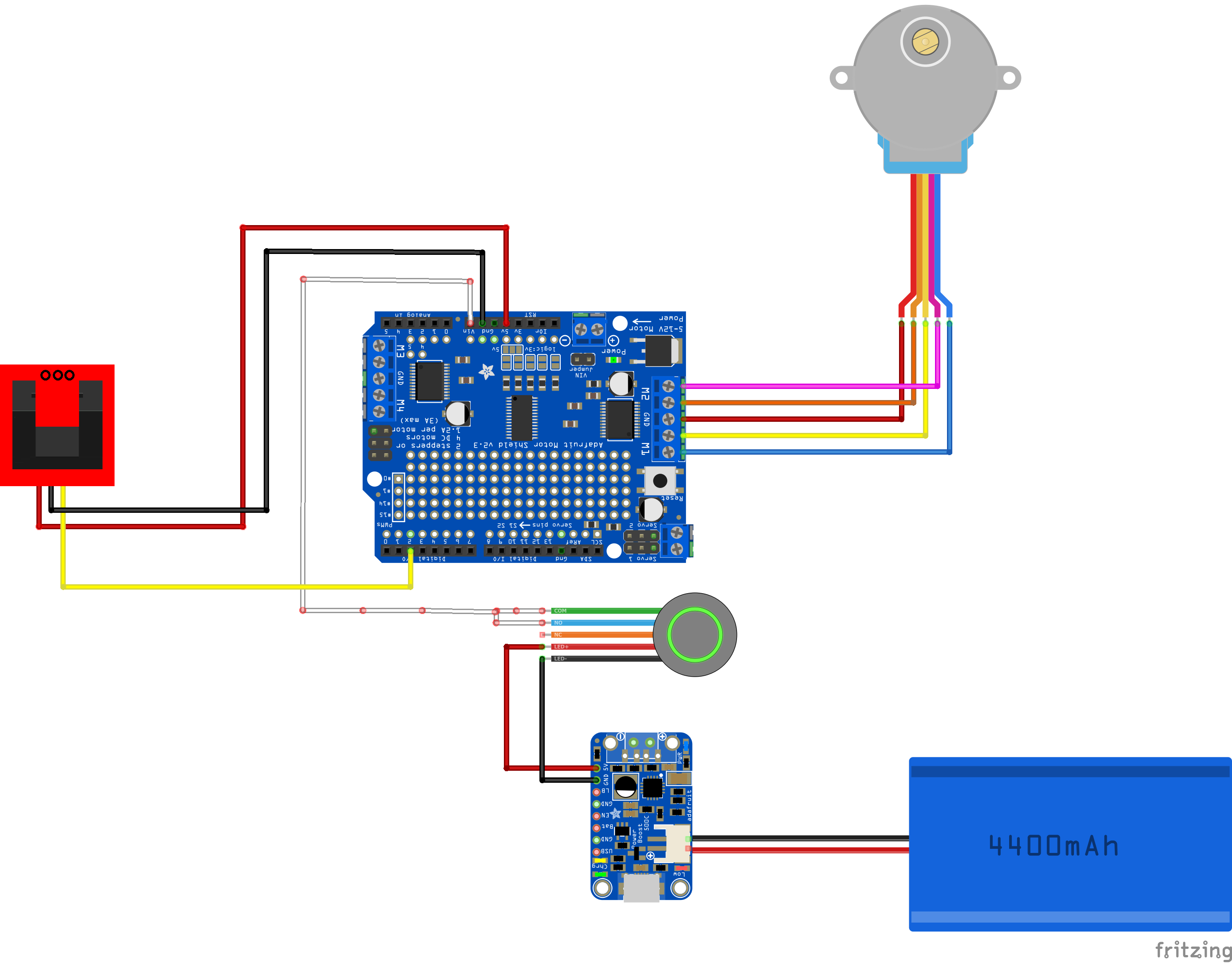
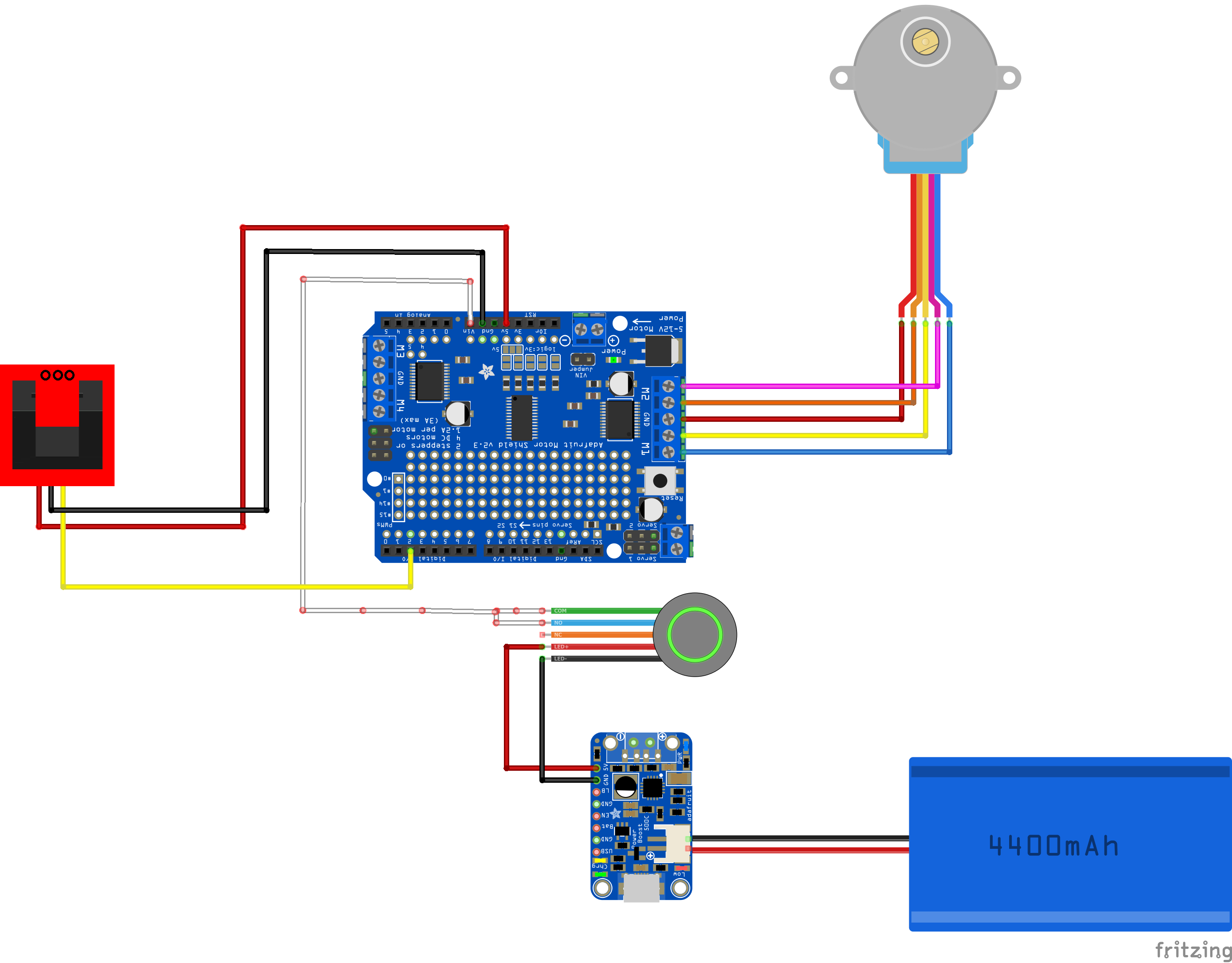
- Conecte los cables de motor paso a paso a los conectores de la regleta de terminales en el protector del motor: rojo al suelo, naranja y rosa a un puerto del motor (por ejemplo, M1), y azul y amarillo a la otra motor puerto (por ejemplo, M2).
- Botón de alimentación externa
- Retire la tuerca del botón de encendido e inserte el botón de encendido en el agujero en el lado derecho de la base. botón de seguridad en su lugar con la tuerca hexagonal.
- Photointerrupter (Figura 3C)
- Coloque el Photointerrupter en su alojamiento impresa en 3D.
NOTA: utilizar una pistola de calor para calentar la vivienda si el Photointerrupter no se asienta todo el camino. - Cadena de la 3-pin conector macho "E" de la Photointerrupter (PWR, GND, y SGL) a través del orificio central delantera de la base impresa en 3D.
- Fijar la carcasa en la base de la FED con dos tornillos de 1 "de nylon y tuercas correspondientes.
- Coloque el Photointerrupter en su alojamiento impresa en 3D.
- Cable de salida BNC (opcional)
- Inserte el conector BNC en el agujero en el lado izquierdo de la base FED. Asegure en su lugar con la tuerca.
- Si no se utiliza el conector BNC, tape el orificio con el enchufe impresa en 3D.
- Batería y tabla de impulso (figura 3D)
- Conectar 3.7 V batería al módulo de convertidor elevador CC / CC a través de la conexión de 2 pines JST. El LED azul en la tabla de Boost se iluminará si la batería está cargada.
- Placas de montaje en el interior de la vivienda (Figura 3E)
- Monte microcontrolador en el interior de la base con conexiones FTDI frente al interruptor de alimentación, usando # 4 ¼ "tornillos de chapa de acero x.
- Apilar el blindaje del motor y el escudo de registro de datos en la parte superior del microcontrolador.
- Tornillo de la placa de refuerzo en el caso usando # 2 x ¼ "hoja de tornillos de metal de acero. Monte Boost con la ranura micro-SD que apunta hacia abajo. FED se puede cargar a través de este puerto sin abrir la caja.
- Conectar los cinco conectores, "A" masculino "A" femenino "B" masculino a femenino "B", etc.
- Coloque la batería dentro de la base impresa en 3D y cerca deslizando la tapa posterior. Deslice sobre la placa nominal impreso en 3D.
5. Validación y Adquisición de Datos
NOTA: Antes de encender un sistema FED, asegúrese de insertar una tarjeta SD en el escudo SD, de lo contrario FED no va a dispensar gránulos. Además, asegúrese de puente de encendido en el protector del motor (justo encima del bloque de potencia) en su sitio.
- Encienda el sistema alimentado con la funcionalidad pulsador de alimentación y el dispositivo de prueba.
- Llenar el silo de comidas con 20 mg de bolitas de comida antes de encender.
NOTA: El interruptor de encendido debe encenderse, al igual que los LEDs en el microcontrolador, escudo SD, y el blindaje del motor. Si no hay ningún precipitado en el pozo, hay que dispensar. - quitar manualmente 5 - 10 bolitas de los alimentos y así confirmar que el reemplazo de pastillas se dispensan.
- Llenar el silo de comidas con 20 mg de bolitas de comida antes de encender.
- Retire la tarjeta SD y verificar que los datos se registra correctamente. Los datos deben ser adquiridos en un valores separados por comas (CSV) que se denomina de acuerdo con la VAFILENAME riable en el código.
- Coloque la unidad ingresa al interior del establecimiento experimental, suministro de energía y asegurar que una pastilla se dispensa en la comida bien.
- En el transcurso de la adquisición de datos, comprobar alimentados diariamente para verificar que esté funcionando correctamente, lo que confirma que la luz LED en el interruptor de alimentación está encendida (esto indica que la batería tenga suficiente carga) y una pastilla se sienta en la comida bien (indica que no hay problemas con la dispensación de pellets).
- Después de la adquisición de datos, recuperar la tarjeta SD y acceso a archivos CSV.
NOTA: las secuencias de comandos de análisis para las comidas y los patrones de alimentación están disponibles en: https://github.com/KravitzLab/fed.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Las pruebas de validación que implican el uso de animales fueron revisados y aprobados por el Comité de Cuidado y Uso de Animales en el Instituto Nacional de Diabetes y Enfermedades Digestivas y Renales. Para demostrar el uso de la FED para medir la alimentación jaula, adulto femenino ratones C57BL / 6 (n = 4) fueron alojados individualmente con acceso ad libitum a agua y pienso estándar de laboratorio bajo un ciclo de 12/12 h de luz / oscuridad (luces encendidas a las 05:00). Después de un período de habituación de una semana, la tolva de comida fue removido y reemplazado con un FED durante cinco días de pruebas de validación. Al final del período de prueba, FED fueron retirados de las jaulas y los datos de alimentación se analizó cada tarjeta SD utilizando la costumbre, las secuencias de comandos de libre disposición y un programa de hoja de cálculo. Como se muestra en la figura 4A, la recuperación de pellets para ratones individuales (panel superior; raster indican eventos sola pastilla de recuperación) y la recuperación media de pellets a través de todos los ratones en 30 contenedores min (boPanel ttom; línea indica la media ± SEM) muestran la alimentación continua a lo largo del período de pruebas de validación, con la ritmicidad circadiana claramente visualizada. Para cuantificar la exactitud de la capacidad de registro de datos de la FED, se entregó a cada sistema de FED 1000 pellets para el período de pruebas de validación y los sedimentos restantes se contaron y se compara con los datos registrados en la tarjeta SD de forma manual. FED registra 95,35 ± 1,25% de los pellets que fueron despachados a la tarjeta SD (Figura 4B).

Figura 1: Componentes 3D Diseñado FED. Mediciones (A) de la FED ensamblado. (B) despiece de componentes impresos en 3D en un FED montado. (C) despiece del conjunto de pellet tolva completa (izquierda), el montaje de motor paso a paso en el disco (medio) de rotación, y el montaje de silo de alimentos en el disco giratorio (rderecho). (D) Diseño de comida bien con los brazos para asegurar el Photointerrupter para la detección de pellets. (E) Fotografía del FED totalmente montado. Haga clic aquí para ver una versión más grande de esta figura.

Figura 2: Cableado de la FED componentes eléctricos. Cableado y montaje de (A) Conectores (B) del microcontrolador, Datos escudo de registro / SD, el blindaje del motor, (C) Botón de encendido, (D) Photointerrupter, (E) tabla de Boost, cable de salida (F) BNC, (G) Cableado de escudo motor. Haga clic aquí para ver una versión más grande deesta figura.

Figura 3: Montaje de hardware FED. (A) Montaje de motor paso a paso (izquierda) en el soporte del motor y la conexión del disco de pellets (derecha). (B) del motor paso a paso de cableado para el blindaje del motor. (C) Inserción Photointerrupter en 3D impreso vivienda. (D) Colocación de la batería para impulsar la placa. (E) Tableros ensamblados dentro de la carcasa FED. Haga clic aquí para ver una versión más grande de esta figura.

Figura 4: Datos representativos del producto de alimentos recogidos a través de Fed. Los datos de consumo de alimentos (A) recopilada a través de la FED y se visualizaron mediante secuencias de comandos de análisis de código abierto. Panel superior: rásteres individuales indican los eventos individuales de recuperación de pellets, con filas que contienen los ratones individuales. Panel inferior: línea indica la media ± SEM de la ingesta de alimentos en todos los ratones (n = 4). (B) La exactitud de las unidades individuales de la FED en el registro dispensa pellets. Los colores se corresponden con los rásteres en la figura 3A. Haga clic aquí para ver una versión más grande de esta figura.

Figura 5: usos modificados para FED. (A) de montaje externo FED reduce el espacio de suelo en jaulas de roedores. (B) Cambio de la configuración de cara frontal permite la adición de dos puertos nariz poke para el entrenamiento operante.ve.com/files/ftp_upload/55098/55098fig5large.jpg "target =" _ blank "> Haga clic aquí para ver una versión más grande de esta figura.
Archivo suplementario 1: Esquema de hardware. esquemática gráfica que muestra las conexiones electrónicas de la FED. Por favor, haga clic aquí para descargar este archivo.
Archivo Suplementario 2: Código de salida de la muestra. archivo .CSV ejemplo que muestra el código de salida del FED. Por favor, haga clic aquí para descargar este archivo.
Archivos suplementario 3-6: Análisis de secuencias de comandos. Cuatro secuencias de comandos de análisis se proporcionan para el análisis de datos de la Fed: eating_rate.py, meals.py, meal_bars.py y plotmice.py. Los parámetros de entrada y descripción es proporcionard en secciones comentadas en la parte superior de cada script. Por favor, haga clic aquí para descargar este archivo.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
El dispositivo de alimentación Experimentación (FED) es un sistema flexible de vigilancia ingesta de alimentos. A continuación, describimos instrucciones detalladas sobre la fabricación y la solución de problemas del dispositivo, incluyendo el montaje de hardware 3D impresa, soldadura de componentes eléctricos, y la carga de los bocetos en los microcontroladores. Aunque es importante seguir todos los pasos descritos en el protocolo con cuidado, hay pasos críticos que merecen una atención especial en cada sección para asegurar un producto final exitoso. El 3D impreso disco giratorio debe ajustarse bien al eje del motor paso a paso y ser capaz de girar con resistencia mínima de las piezas vecinas. Al soldar conexiones de las patillas, asegúrese de que la junta de soldadura es segura sin tener exceso de soldadura. Asegúrese de que todas las bibliotecas adicionales instalados deben estar ubicados en el directorio correcto antes de cargar el guión en el microcontrolador. El proceso de montaje de la FED implica tareas que son fácilmente alcanzables, incluso sin previoexperiencia en la impresión 3D o la electrónica.
Hay pocas limitaciones con FED. En primer lugar, cada FED utiliza una tarjeta SD interna para registrar y almacenar datos. Las tarjetas SD pueden ser un medio engorrosos para rastrear y almacenar datos de muchos FED. Estamos explorando la transferencia inalámbrica de datos para aliviar este problema, pero la iteración actual del FED se basa en el almacenamiento local en tarjetas SD. En segundo lugar, ~ 5% del tiempo FED dispensa dos pastillas en lugar de uno. Mientras que los atascos de pellets no se han producido en nuestras manos con la frecuencia suficiente para contar, esta posibilidad debe ser estrictamente controlada ya que no podemos descartarlos por completo. Los usuarios nunca deben dejar a los ratones con la FED como su única fuente de alimento sin comprobar la funcionalidad de la FED diaria. A pesar de estas limitaciones, creemos que la tasa de errores de la FED es aceptable para la mayoría de los estudios de investigación. Dicho esto, en el trabajo futuro se buscará disminuir estos errores aún más. Por último, la tolerancia de la impresión en 3D puede variar en función de la impresora 3D específico y material. Comotales, los archivos de diseño 3D que proporcionamos pueden necesitar ser ajustado para imprimir en otros modelos de impresora 3D, o con otros materiales. Como una sugerencia útil, hemos encontrado que una pistola de calor se puede utilizar después de la impresión para ablandar piezas impresas en 3D para ajustes menores.
Un único FED puede ser montado por aproximadamente $ 350. Por este precio, se estima ~ $ 200 para la impresión en 3D comercial de material de PLA, y ~ $ 150 para la compra de los componentes electrónicos. costes de impresión 3D varían mucho dependiendo de la calidad y del material. Es posible reducir este coste considerablemente si un usuario imprime sus propias partes. FED podría también ser impresa o a máquina a partir de materiales más duraderos, tales como acero inoxidable o aluminio, aunque esto sería más costoso.
Elegimos para construir FED con un microcontrolador en un circuito programable con una plataforma de código abierto. Para ello, se optó por el microcontrolador de código abierto (véase la Tabla de Materiales) ya que tiene unabajo consumo de energía. Sin embargo, nuestro código debería funcionar en cualquier junta que tiene pines de entrada / salida suficientes. El cambio de las juntas de microcontroladores es probable que requiera cambios menores en el código. Proporcionamos todos los archivos de diseño y el código en línea, y nuestro diseño es de código abierto para proporcionar a los investigadores flexibilidad para modificar FED para satisfacer sus necesidades, incluyendo el uso de otras placas de microcontroladores.
Hay una tendencia creciente hacia el hardware de código abierto para la investigación científica. Varios grupos han hecho los dispositivos de código abierto para la investigación en neurociencias, incluyendo OpenControl, un software para el seguimiento de los animales de video durante las tareas de comportamiento 7; ROBucket, una cámara operante basado en Arduino para la entrega resultado líquido 8; ELOPTA, un dispositivo operante basado en PIC para la entrega de resultados de pellets 9; y BEEtag, un sistema de seguimiento basado en la imagen para abejorros 10. FED complementa estos con su factor de forma única e lcosto de flujo. Un objetivo clave de la FED fue para que sea de código abierto. el hardware de código abierto permite a los investigadores realizar pequeños ajustes a los diseños (por ejemplo, para modificar las dimensiones), pero es especialmente potente cuando los usuarios realizan grandes modificaciones para ampliar la funcionalidad del hardware. Por ejemplo, es bastante fácil de modificar el diseño de la FED para el montaje externo en una jaula, que protege tanto la FED y aumenta el espacio dentro de la jaula (Figura 5A). Además, hemos diseñado FED tener espacio para la nariz-asoma a cada lado de la alimentación y de la formación operante, y hemos implementado con éxito estos con cambios menores de diseño (Figura 5B). Publicaremos esos cambios en nuestra página web (https://github.com/KravitzLab/fed), donde también deseando acoger otras mejoras de la comunidad de investigación.
Subscription Required. Please recommend JoVE to your librarian.
Acknowledgments
Este trabajo fue apoyado por el Programa de Investigación Intramural de los Institutos Nacionales de Salud (NIH), el Instituto Nacional de Diabetes y Enfermedades Digestivas y Renales (NIDDK). Agradecemos a la Sección de NIH en instrumentación y la Biblioteca del NIH para obtener ayuda con la impresión en 3D.
Materials
| Name | Company | Catalog Number | Comments |
| Electronics | |||
| Adafruit Motor/Stepper/Servo Shield for Arduino v2 Kit - v2.3 | Adafruit | 1438 | Use of other motor shields has not been tested and will require changes to the code |
| Adafruit Assembled Data Logging shield for Arduino | Adafruit | 1141 | Use of other data logging shields has not been tested and will require changes to the code |
| PowerBoost 500 Charger | Adafruit | 1944 | Other voltge regulator boards have not been tested, but should work if they have similar specifications |
| FTDI Friend + extras - v1.0 | Adafruit | 284 | Any FTDI-USB connection will work |
| Small Reduction Stepper Motor - 5VDC 32-Step 1/16 Gearing | Adafruit | 858 | Use of other stepper motors has not been tested |
| Arduino Pro 328 - 5V/16MHz | SparkFun | DEV-10915 | Other Arduino boards should work, although may require changes to the code |
| Photo Interrupter - GP1A57HRJ00F | SparkFun | SEN-09299 | Other photointerrupters will work, but may require changes to the 3D design |
| SparkFun Photo Interrupter Breakout Board - GP1A57HRJ00F | SparkFun | BOB-09322 | Other photointerrupters will work, but may require changes to the 3D design |
| Connectors, screws, and miscellaneous items | |||
| Shield stacking headers for Arduino (R3 Compatible) | Adafruit | 85 | Any stacking header that says Arduiono R3 compatible will work |
| Multi-Colored Heat Shrink Pack - 3/32" + 1/8" + 3/16" | Adafruit | 1649 | Any heatshrink will work |
| Hook-up Wire Spool Set - 22AWG Solid Core - 6x25ft | Adafruit | 1311 | Any wire will work |
| Lithium Ion Battery Pack - 3.7V 4400 mAh | Adafruit | 354 | Any 3.7 V Lithium battery with a JST connector will work |
| SD/MicroSD Memory Card (8GB SDHC) | Adafruit | 1294 | Any SD card will work |
| 50 Ohm BNC Bulkhead Jack (3/8" D-Hole) | L-com | BAC70A | Any BNC bulkhead will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 6 size, 1/4" Length | McMaster-Carr | 90184A120 | Any screws of this specification will work |
| Type 316 Stainless Steel Pan Head Phillips Sheet metal screw, No 2 size, 1/4" Length | McMaster-Carr | 91735A102 | Any screws of this specification will work |
| Nylon 100 Degree Flat Head Slotted Machine Screw, 4-40 Thread, 1" Length | McMaster-Carr | 90241A253 | Any screws of this specification will work |
| Nylon Hex Nut, 4-40 Thread Size | McMaster-Carr | 94812A200 | Any nut of this specification will work |
| 2 Pin JST M F Connector 200 mm 22AWG Wire Cable | NewEgg | 9SIA27C3FY2876 | Any 2 pin connector will work for this connection |
| Metal Pushbutton - Latching (16 mm, Red) | SparkFun | COM-11971 | Any push button or switch will work |
| Resistor Kit - 1/4 W | SparkFun | COM-10969 | Any 1/4 W resistors will work |
References
- Ellacott, K. L., Morton, G. J., Woods, S. C., Tso, P., Schwartz, M. W. Assessment of feeding behavior in laboratory mice. Cell Metab. 12 (1), 10-17 (2010).
- Betley, J. N., et al. Neurons for hunger and thirst transmit a negative-valence teaching signal. Nature. 521 (7551), 180-185 (2015).
- van den Heuvel, J. K., et al. Neuropeptide Y activity in the nucleus accumbens modulates feeding behavior and neuronal activity. Biol Psychiatry. 77 (7), 633-641 (2015).
- Cone, J. J., Roitman, J. D., Roitman, M. F. Ghrelin regulates phasic dopamine and nucleus accumbens signaling evoked by food-predictive stimuli. J Neurochem. 133 (6), 844-856 (2015).
- Ulman, E. A., Compton, D., Kochanek, J. Measuring food and water intake in rats and mice. ALN Mag. , 17-20 (2008).
- Nguyen, K. P., O'Neal, T. J., Bolonduro, O. A., White, E., Kravitz, A. V. Feeding Experimentation Device (FED): A flexible open-source device for measuring feeding behavior. J Neurosci Methods. 267, 108-114 (2016).
- Aguiar, P., Mendonca, L., Galhardo, V. OpenControl: a free opensource software for video tracking and automated control of behavioral mazes. J Neurosci Methods. 166 (1), 66-72 (2007).
- Devarakonda, K., Nguyen, K. P., Kravitz, A. V. ROBucket: A low cost operant chamber based on the Arduino microcontroller. Behav Res Methods. 48 (2), 503-509 (2016).
- Hoffman, A. M., Song, J., Tuttle, E. M. ELOPTA: a novel microcontroller-based operant device. Behav Res Methods. 39 (4), 776-782 (2007).
- Crall, J. D., Gravish, N., Mountcastle, A. M., Combes, S. A. BEEtag: A Low-Cost, Image-Based Tracking System for the Study of Animal Behavior and Locomotion. PLoS One. 10 (9), (2015).

{kind=link}
{kind=link}