



Overview
図1Dに示すデルタ翼は、トランスおよび超音速飛行体制での優れた性能により、高速飛行機で人気のデザインです。翼のこのタイプは、小さなアスペクト比と高いスイープ角度を有し、高い亜音速、トランスオニック、超音速飛行体制でのドラッグを低減します。アスペクト比は、翼のスパンを平均弦で 割ったものとして定義されます。
割ったものとして定義されます。
デルタウィングの重要な利点は、その高い失速角度です。デルタ翼のストールは、高アスペクト比翼のストールに比べて遅れます。これは、デルタ翼の揚力が翼上の最先端の渦によって強化されるためです。
この渦流現象を観察し、デルタ翼の渦破壊を研究する効果的な方法は、水トンネル内の流れを視覚化することです。最先端の色素ポートからモデルを取り巻く流れに染料を注入することで、渦の発達と破壊を観察し、その位置を測定することができます。データは、失速角度を推定するためにも使用できます。
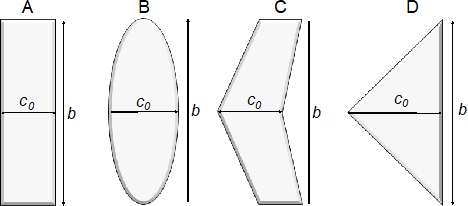
図 1.典型的な翼の計画形状:A)長方形、スパンに沿って一定の弦、B)楕円形、C)テーパ、スパンに沿って可変弦、およびD)デルタ翼、テーパ比ゼロの後方スイープ翼。
Principles
デルタ翼がわずかに高い角度の攻撃を受けると、通常は7°を超える角度で、流れの分離が最先端で起こります。後縁付近で下流に発生する流れの分離の代わりに、長方形の翼で起こるように、最先端の渦のロールアップは、図2に示すように、翼の上面に低圧を誘導し、リフトを高めます。この現象は渦リフトと呼ばれ、長方形の翼の失速角度に比べて遅れた高い失速角度に寄与します。

図 2.適度な攻撃の角度でデルタ翼上の渦形成。A)翼頂点で形成されるコアと渦を示す青いストリークラインと、ハーフコードで先縁からの渦ロールアップを示す緑色のストリークラインを持つトップビュー。B) 渦ロールアップを伴う側面図。頂点(青色染料)に由来する渦は、ハーフコード(緑色色素)で生成された渦と相互作用します。
これらの渦は翼頂点から始まり、ある時点で高い不利な圧力勾配のために破裂(渦破壊)を下流に進みます。渦の破壊が起こると、渦はもはや低圧を誘発することはできません。攻撃の比較的低い角度では、渦の内訳はトレーリングエッジの下流で発生します。しかし、攻撃の角度が大きくなると、渦分解の位置が上流に移動し、翼面の大部分で故障が発生します。これは上昇を減らし、翼が停止する原因となる。
これらの渦パターンは、水洞内の染料を用いて流れを可視化して観察することができる。染料の安定した流れは、リーディング エッジの近くのモデル上の適切な位置のポートを介して解放されます。染料は水と混合し、ストリークラインの視覚化を可能にする流れに従います。染色された流れを追跡し、渦の形成、発達、および他の渦および流れ構造との相互作用は、渦が破壊されるまで観察される。
トンネル内の染料と水は同様の物理的特性を有する必要があり、ポート開口部の放出圧力は、流れに対する乱れを最小限に抑えるために、ローカルの流れ圧力と同じでなければなりません。色素によって形成されるストリークラインは、渦、層積分領域、乱流領域、遷移領域などのさまざまな流れ構造を強調表示します。これらの構造を観察し、フローに対する異なるジオメトリまたはモデル姿勢の効果を比較するために使用できます。

図 3.デルタ翼実験セットアップ。A)デルタ翼は、水トンネル試験セクション内のC支柱に取り付けられました。B)水トンネルの壁へのCストラット接続。C)染料容器、加圧空気供給、および色素流量を制御する3つのバルブ。
Subscription Required. Please recommend JoVE to your librarian.
Procedure
1. 水道トンネルの整備
- 3つの500 mLコンテナを取得し、各容器を少なくとも半分の色素で充填します。青色染料を持つ容器が1つ、緑色の染料と赤色染料の容器が1つあるはずです。色素の流量はそれに応じて調整されるので、濃度は重要ではありません。
- デルタウィングを水トンネルのサポートに取り付けます。C支柱をネジで水トンネルに取り付け、ヨーの角度をゼロにします。図 3 を参照してください。
- 水のトンネルを水で満たします。
- 1 台のカメラを配置して翼の上部ビューをキャプチャし、2 台目のカメラを配置してサイド ビューをキャプチャします。
2. デルタウィング上のストリークラインの可視化
- C支柱の角度を調整して攻撃角度をゼロに設定します。
- 水トンネルの流速を 4 in/s に設定し、流れを安定させます。
- ポンプを使用して染料貯蔵所への圧力を供給する。
- 染料の縞を観察し、必要に応じて色素流量を調整して連続的なストリークを持たれます。染料の流量は設定されていない。すべての色を同時に適用します。各色は、渦相互作用を視覚化するために翼の異なる領域に適用されます。図 2 を参照してください。
- 各カメラのレコードを押して、フッテージのキャプチャを開始します。渦相互作用を観察し、渦ロールアップと一次渦コアを特定します。
- 渦の少なくとも10sを記録する。
- 攻撃角度を5°に上げ、流れと筋線が安定するのを待ち、渦を10sに記録します。
- 攻撃角度を0~55°から5°ずつ増やして実験を繰り返します。
- 水が濁りすぎて、筋線が鈍く見える場合は、染料の供給を閉じ、トンネルを止め、続行する前に淡水に置き換えます。
- すべての試行が完了したら、カメラの電源を切り、色素供給を閉じます。
- トンネルをオフにし、タンクから水を排出し、トンネルの壁から染料の残骸を洗い流します。
航空機の翼とその設計は、航空機の性能特性を定義するために不可欠です。デルタウィングは、トランスおよび超音速飛行体制で優れた性能を発するため、高速飛行機で人気のデザインです。
デルタ翼は、平均コード長で割った翼スパンとして定義される小さなアスペクト比を有する。デルタウィングの場合、これはルートコードの長さの1/2です。長方形の翼や掃引テーパー翼のような他の一般的な翼の設計は、より高いアスペクト比を持っています。
デルタウィングには、25%の弦線と横軸の間の角度として定義される高いスイープ角度もあります。これらの翼特性は、高い亜音速、トランソニック、および超音速飛行体制での抗下を減らします。重要なことに、デルタ翼は高い縦横比の翼と比較して高い失速角を有する。
エアロダイナミクスでは、失速角度は攻撃角度が高すぎるポイントであり、揚力が低下します。デルタ翼の高い失速角度は、渦リフトと呼ばれる翼上の最先端の渦による高い揚力によるものです。渦リフトは、デルタ翼が攻撃の高い角度にさらされると発生し、長方形の翼の場合と同様に、後縁付近で下流に発生するのではなく、翼の前端で流れの分離が行われます。
最先端の渦のロールアップは、翼の上面に低圧を誘発します。この圧力差異は揚力を高める。これらの渦は翼頂点から始まり、下流に進行する。ある時点で、彼らは高い有害な圧力勾配のために、渦破壊と呼ばれる破裂します。
いったん渦の破壊が起こると、渦はもはや低圧を誘発することができません。攻撃の低い角度では、渦の破壊は後縁の下流で起こる。しかし、攻撃角度が大きくなるにつれて、渦内訳の位置は、翼面の大部分で故障が発生するまで上流に移動します。これは揚力を減らし、翼が停止する原因となる。
この実験では、染料を用いた水洞を用いて、デルタ翼モデル上でこれらの渦パターンを可視化し、異なる角度から渦破壊の位置を追跡する。
この実験を行うには、水のトンネルへのアクセスが必要です。まず、3つの500mLコンテナを取得し、染料で少なくとも半分を満たします。青色染料に1つの容器、緑色の染料用にもう1つ、赤色染料用の容器を使用します。
実験で使用したデルタウィングモデルは、すでに3つの染料容器にチューブが接続されています。また、翼の3つの異なる領域で異なる色の染料を分散させる3つの染料注入タップを持っています。距離の測定値は、1cmの目盛りを使用して翼上でマークされます。デルタウィングは、既にCストラットサポートに取り付けられている必要があります。ねじでトンネルに接続し、ヨーの角度を可能な限り0に近づけます。
デルタウィングが設置されたら、水トンネルを水で満たします。サイド ビューの参照を提供するために、目盛りの用紙をアタッチしていることを確認します。次に、カメラを配置して翼の上部図をキャプチャします。2 つ目のカメラを配置して、サイド ビューをキャプチャします。次に、各カメラの「記録」を押して、色素注入とその後の渦の映像をキャプチャします。
C支柱の角度を調整して、攻撃角度を手動で 0 に設定します。次に、水トンネルの流速を4in/sに設定します。流れが安定したら、手動ポンプを使用して染料貯蔵所に圧力を供給します。
染料の縞を観察し、その後、連続的な筋を生成するために、3つのノブを使用して染料の流量を調整します。3色すべてを一度に適用すると、翼の異なる領域で渦相互作用を見ることができます。渦相互作用を観察し、渦ロールアップと一次渦コアを識別します。
渦の少なくとも 10 秒を記録した後、攻撃の角度を 5 度に変更します。流れと縞線が安定するのを待ち、渦を少なくとも10s記録します。
攻撃角度を5°単位で55°まで上げて測定を繰り返します。毎回、ストリークライン渦パターンの少なくとも 10 s を記録します。
水が濁りすぎて、筋線が鈍く見える場合は、染料の供給を閉じてトンネルをオフにします。水を排出し、続行する前に淡水に置き換えます。
すべての試行が終了したら、カメラの電源を切り、色素の供給を閉じます。その後、トンネルをオフにし、水を排出します。終わったら必ずトンネルの染料を洗い流してください。
実験から、異なる攻撃角度で渦の内訳を特定できます。翼頂点から渦内訳までの距離をLBとラベル付けして測定します。わかりやすくするために、この距離は後縁からの弦の長さのパーセンテージとして参照します。
次に、攻撃の角度ごとに、後縁から渦内訳までの距離を見てみましょう。ここに示すように、攻撃角度が大きくなるにつれて渦内訳位置が徐々に上流に移動します。攻撃角度が40°に等しい場合、渦内訳は後縁からの弦の位置の96%で起こります。言い換えれば、ほとんど翼の頂点まで。この姿勢では、デルタウィングは完全な失速を経験します。言い換えれば、それはリフトの完全な損失を経験します。
要約すると、デルタ翼の低アスペクト比と高いスイープ角度が渦リフトと遅延失速にどのように寄与するかを学びました。次に、水抜き管内のモデルデルタ翼の渦流れ現象を観察し、渦内訳を用いて失速角度を推定した。
Subscription Required. Please recommend JoVE to your librarian.
Results
実験から、図4に示すように渦内訳を特定することができます。翼頂点から渦内訳までの距離は、翼に描かれたスケールを用いて測定できます(図4B)。実験中に、翼の攻撃角度を徐々に増加させ、翼頂点に対して渦破壊位置l bを測定した。図5に示すように、翼の後縁に対する内訳位置x/cを攻撃角度に対してグラフ化した。α≥10°の場合、最先端の渦内訳の時間平均位置はデルタ翼の後縁に位置する。 攻撃角度の増加に伴い、渦の内訳の位置は徐々に上流に移動しました。α≥40°の場合、渦破壊は後縁から96%の弦の位置で起こり、デルタ翼の頂点に近い。 この姿勢では、デルタウィングは完全な失速、リフトの完全な損失を経験します。

図 4.渦内訳識別。A) 渦内訳の側面図と翼頂点lbからの渦分解の距離。B) 渦内訳のトップビューと翼頂点lbからの距離.

図 5.渦内訳の場所。攻撃<10°の角度のために、渦の破壊は翼の下流で起こった。攻撃>40°の角度のために、流れは翼の先端で分ける。
Subscription Required. Please recommend JoVE to your librarian.
Applications and Summary
水洞内の流れ可視化を用いて、デルタ翼内の様々な攻撃角度の渦破壊位置を特定した。水トンネル内の流れの可視化は、流れ場の特定の位置に染料を注入することによって行われる。染料は流れに従い、流れのストリークラインを観察します。この方法は、風洞で使用される煙の視覚化手法に似ています。しかし、複数の異なる色素色を使用する機能により、流れの構造と相互作用を容易に視覚化することができました。この方法のもう 1 つの利点は、フロー フィールドの 3D 情報を提供する低コスト手法である点です。
フロービジュアライゼーションのための色素注入は、多数のアプリケーションを持つ古典的な方法です。例えば、パイプ流の乱流に関する有名なレイノルズ実験は、可視化のために染料を使用して実行され、円形パイプの層層と乱流領域を同定しました。この技術は、乱流領域を特定するだけでなく、乱流によって促進される混合を研究するためにも使用することができ、他の流れ構造を研究する。
渦や分離気泡などの流れ構造は、渦リフトを含む物理支配現象に関する重要な情報を提供します。したがって、この方法は、自動車、船舶、高層ビル、長橋などのフローフィールドの影響を受けるデバイスの設計と最適化に役立つフロー可視化に使用できます。
| 名前 | 会社 | カタログ番号 | コメント |
| 機器 | |||
| 大学デスクトップ水道トンネル | ローリングヒルズリサーチ株式会社 | モデル 0710 | テストセクション 7" x 10" x 18" (WxHxL) |
| ダウンストリーム ウィンドウ 7" x 9.5 インチ (WxH) | |||
| 流速2~5秒 | |||
| 赤色染料 | |||
| 緑色染料 | |||
| 青色染料 | |||
| ビデオカメラ | |||
| デルタウィング | Sdsu |
Subscription Required. Please recommend JoVE to your librarian.