

Abstract
Wrijving en slijtage zijn schadelijk voor technische systemen. Ultrasone smering wordt bereikt wanneer het raakvlak van twee glijvlakken wordt getrild met een frequentie boven de akoestische bereik (20 kHz). Als een solid-state technologie, kunnen ultrasone smering worden gebruikt waar conventionele smeermiddelen zijn niet haalbaar of wenselijk. Verder ultrasone smering zorgt voor elektrische modulatie van de effectieve wrijvingscoëfficiënt tussen de beide glijoppervlakken. Deze eigenschap maakt het mogelijk adaptieve systemen dat hun wrijvende staat en de bijbehorende dynamische respons omdat de werkomstandigheden veranderen wijzigen. Slijtage van het oppervlak kunnen ook worden verminderd door ultrasone smering. We ontwikkelden een protocol om de afhankelijkheid van de wrijvingskracht reductie te onderzoeken en te dragen korting op de lineaire glijdende snelheid tussen ultrasoon gesmeerde oppervlakken. Een pin-on-disc tribometer gebouwd die verschilt van commerciële eenheden doordat een piëzo-elektrische stang wordt gebruikt om de pen trillen bij 22kHz loodrecht op het draaibare schijfoppervlak. Wrijving en slijtage metrics inbegrip van effectieve wrijvingskracht, volumeverlies en oppervlakteruwheid gemeten met en zonder ultrasone trillingen bij een constante druk van 1-4 MPa en drie verschillende snelheden schuiven: 20,3, 40,6 en 87 mm / sec. Een optische profilometer wordt gebruikt om de slijtvlakken karakteriseren. De effectieve wrijvingskracht verminderd met 62% bij 20,3 mm / sec. Consistent met bestaande theorieën voor ultrasoon smering, de procentuele daling van de wrijvingskracht afneemt met toenemende snelheid, tot 29% wrijvingskracht reductie bij 87 mm / sec. Slijtagevermindering hoofdzaak constant blijft (49%) en drie snelheden overwogen.
Introduction
Wrijving bestaat op het grensvlak van beide contactvlakken wanneer zij glijden of rollen ten opzichte van elkaar. Wrijving treedt meestal samen met schurende of adhesieve slijtage. 1 Ultrasonics de wetenschap achter hoogfrequente fenomenen, dat wil zeggen, golven reizen op frequenties boven de akoestische bereik (20 kHz). Het gebied van ultrasoon omvat twee fundamenteel verschillende regimes. Een regime impliceert lage intensiteit golven zoals die gebruikt worden in de beeldvorming processen zoals medische echografie of niet-destructieve inspectie van structuren. De andere is een hoog vermogen regime waarin hoogenergetische golven worden gebruikt om uit te voeren of te ondersteunen technische processen zoals lassen van kunststoffen en metalen. Er is aangetoond dat de toepassing van deze laatste soort ultrasone trillingen aan het grensvlak van twee oppervlakken in glijdend contact vermindert de effectieve wrijvingskracht bij het grensvlak. Dit verschijnsel is bekend als ultrasone smering.
Bereikenultrasone smering tussen twee schuivende objecten, moet de relatieve trillingen op ultrasone frequenties worden vastgesteld tussen hen. Trillingen worden typisch aangebracht op één van de twee voorwerpen, hetzij in de langsrichting, dwarsrichting, of loodrecht ten opzichte van het glijsnelheid. In deze studie wordt een pin tribometer is voorzien van een piëzo-elektrische actuator, zodat de punt vibreert in de richting loodrecht op de draaiende schijf tribometer's. Piëzo-elektrische materialen zijn een klasse van "slimme" materialen die vervormen wanneer blootgesteld aan elektrische velden, trillen op dezelfde frequentie als de veldexcitatie. Piëzo-elektrische materialen kunnen trillen op frequenties goed in de MHz. Gesuperponeerd op het macroscopische snelheid ultrasone trillingen tot gevolg afwisselende richting van de momentane wrijvingskracht en het contact tussen de oppervlakken, die in combinatie leidt tot een vermindering van de effectieve wrijvingskracht en oppervlakteslijtage. Ultrasone wrijvingsreductie aangetoond praktische productiesystemen. Zo is deze technologie toegepast om de kracht tussen werktuig en werkstuk metalen en vormgevingsprocessen zoals boren, persen, walsen blad en draadtrekken verminderen. Voordelen omvatten verbeterde afwerking 2 en een verminderde behoefte aan dure en milieubelastende reinigingsmiddelen om smeermiddelen uit het eindproduct te verwijderen. Er zijn potentiële toepassingen van ultrasone smering in andere gebieden. Zo kan ultrasoon smering hoofdzaak de gebruikerservaring in persoonlijke gezondheidszorg te verbeteren door het elimineren van de noodzaak voor smeeroliën of coatings. In de auto-toepassingen, kan wrijving modulatie van de prestaties van de bal gewrichten te verbeteren terwijl vermindering van wrijving tussen voertuig zitplaatsen en rails vergemakkelijkt zetel beweging, bespaart ruimte en massa die anders zouden worden ingenomen door traditionele componenten en mechanisms. Ultrasone smering kan ook helpen om het brandstofverbruik te verbeteren door het verminderen van de wrijving in de aandrijflijn en veersystemen. 3 In de ruimte toepassingen, waar de traditionele smeermiddelen niet kan worden gebruikt, kunnen ultrasone smering worden gebruikt om slijtage te verminderen en drastisch verlengen de levensduur van kritische componenten.
Laboratorium demonstraties van wrijving reductie door ultrasone smering zijn talrijk. Wrijving reductie wordt gekwantificeerd als het verschil tussen de wrijvingskracht gemeten zonder ultrasone smering en de wrijvingskracht met ultrasone trillingen toegepast. In beide gevallen wordt de wrijvingskracht rechtstreeks gemeten krachtsensoren. Littmann et al. 4-5 aangesloten een piëzo-elektrisch aangedreven actuator een schuif, waarop een krachtsensor en een frame geïnstalleerd voor het meten wrijvingskrachten en toepassen normale belasting. Een pneumatische aandrijving werd gebruikt om de schuifknop duwen samen met de aandrijving langs een geleiderail. Ultrasonec trillingen toegepast in de richting van de lengterichting van de glijsnelheid. Bharadwaj en Dapino 6-7 soortgelijke experimenten uitgevoerd met behulp van een piëzo-elektrische stang actuator verbonden met een kegelvormige golfgeleider aan weerszijden van de stapel. Contacten plaatsgevonden tussen de bolvormige randen van de kegels en de oppervlakte van de geleiderail. De effecten van het systeem parameters zoals contact stijfheid, normale belasting, en globale stijfheid werden bestudeerd. Kumar en Hutchings 8 installeerde een pin op een sonotrode die werd bekrachtigd door een ultrasone transducer. Ultrasone trillingen werden gegenereerd en aan de pen, die in contact met een gereedschapsstaal oppervlak werd geplaatst. Normale kracht werd door een pneumatische cilinder toegepast en gemeten door een meetcel. De relatieve beweging tussen de pin en de schijf werd gemaakt door een heen en weer bewegende tafel.
Pohlman en Lehfeldt 9 geïmplementeerd ook een pin-on-disc experiment. In tegenstelling tot andere studies, gebruikt ze een magnetostrictive transducer ultrasone trillingen te genereren. Om de optimale richting voor ultrasone wrijving reductie te bestuderen, werd de transducer zorgvuldig afgestemd, zodat de vibratie richting was lengte-, dwars- en verticale aan de macroscopische snelheid. Ze bestudeerden ultrasone wrijving korting op zowel droge en gesmeerde oppervlakken. Popov et al. 10 gebruikt een aandrijving met conische golfgeleiders. De actuator werd in contact gebracht met een roterende bodemplaat. Kegels van negen materialen met verschillende hardheden hebben tot doel de invloed van materiaalhardheid op ultrasone verminderde wrijving bestuderen. Dong en Dapino 11-13 gebruikt een piëzo-elektrisch transducer voor het genereren en verzenden van ultrasone trillingen een prismatische golfgeleider met afgeronde hoeken. De longitudinale trillingen veroorzaakt verticale trillingen als gevolg van Poisson effect. Een slider met een gebogen top werd onder en in contact de golfgeleider geplaatst. Een frame werd gebouwd om normale krachten toe te passen bij het contact interface. THij slider werd manueel getrokken rond het middengebied van de golfgeleider; de wrijvingskracht werd gemeten door een meetcel die was verbonden met de schuif.
Ultrasoon geïnduceerde slijtage vermindering werd eveneens onderzocht en gedemonstreerd. Volumeverlies, gewichtsverlies en oppervlakteruwheid veranderingen worden toegepast om de ernst van wear.Chowdhury kwantificeren en Helali 14 getrild een roterende schijf in een pen-op-schijf setup. De trillingen werden gegenereerd door een draagconstructie uit twee evenwijdige platen onder de draaiende schijf. De bovenplaat heeft een bolvormige bal geïnstalleerd buiten het midden aan de onderkant, die glijdt in een sleuf die is gegraveerd op het bovenvlak van de bodemplaat. Het slot werd bewerkt met een periodiek variabele diepte, zodat de bovenplaat verticaal beweegt tijdens het draaien. De frequentie bedroeg ongeveer 100 Hz afhankelijk van de rotatiesnelheid.
Bryant en 15-16 York bestudeerden het effect van micro-trillingen op woor reductie. Ze ingevoegd carbon cilinder door een houder met één uiteinde rust op een draaiende stalen schijf en het andere uiteinde verbonden met een spiraalveer. In één geval werd de cilinder nauwsluitend aangebracht in de houder, zodat er geen ruimte voor trillingen. In andere gevallen werden spelingen overgelaten aan micro-trillingen van de cilinder mogelijk maken, terwijl de cilinder in contact met de draaiende schijf. Het gewichtsverlies van de fles werd gemeten om de slijtage te berekenen. Er werd aangetoond dat de zelf opgewekte micro-trillingen hielp verminderen van de slijtage met 50%.
Goto en Ashida 17-18 heeft ook een pin-on-disc experiment. Ze verbonden pin monsters met een transducer via een taps toelopende kegel en een hoorn. De pen getrild in de richting loodrecht op het schijfoppervlak. Een massa verbonden met de omzetter op zijn bovenkant voor het aanbrengen normale belasting. Wrijvingskrachten werden vertaald van het koppel dat is uitgeoefend op de schijf te roteren. Wear werd geïdentificeerd als kleefmiddel omdat zowelpin disc werden gemaakt van carbon staal. Slijtage tarieven werden berekend op basis van volume verlies metingen.
Het is aangetoond dat lineaire snelheid een belangrijke rol speelt ultrasone smering. De experimentele deel van dit onderzoek richt zich op de afhankelijkheid van de wrijving en slijtage korting op lineaire snelheid.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
1. Ontwikkeling van de Modified Tribometer
- Installeer chuck-motor subsysteem.
- Level trillingsisolatie tafel. Plaats DC motor op de tafel; het niveau van de motor met vulplaatjes en bevestig het met stutten en bouten. Plaats steun kader rond de motor.
- Sluit gleufas de motoras met een sleutel. Leg steunplaat op het frame met de tandwielas gaan door het gat in de plaat. Set stuwkracht naald rollager op de steun plaat en rond de tandwielas. Smeer de lager met snijvloeistoffen.
- Sluit de splineas om de boorkop door middel van een adapter plaat, die een splineas koppeling aan de ene kant en de boorkop de bout patroon op de andere kant heeft. Op dit punt wordt de klem door het gestel door het druklager en verbonden met de motor via de adapterplaat.
- Installeer de gymbal montage.
- Bouwen van het onderstel met U-kanaal stutten, beugels, enbouten. Gebruik vier lange stutten als pilaren, en gebruik maken van drie kortere als dwarsbalken.
- Bevestig de vier pijlers van de trillingsisolatie tafel met behulp van beugels en bouten. Sluit de gymbal samenstel aan de middelste dwarsbalk met bouten en moeren.
- Installeer een horizontaal georiënteerde load cell in de gymbal vergadering; star sluit één kant van de meetcel naar het frame van de gymbal samenstel, terwijl het aansluiten van de andere kant van de gymbal arm met een draad.
- Monteer de piëzo-elektrische actuator.
- Plaats 3 in lange, volledig draadstang door de opening van de piëzo-elektrische stapel; zet een ring en een moer aan elk uiteinde van de stapel; laat ongeveer 1/8 in draad uitsteekt uit het einde van een moer.
- Draai de moeren aan beide uiteinden een voorspanning in de stapel te maken. Verbind de lange, blootgesteld draden om de gymbal arm met behulp van moeren en ringen. Draad eikelnoot op het andere uiteinde van de piëzo-actuator en insert disc in de boorkop (dit eikelnooten de schijf worden gebruikt voor de set-up doeleinden, niet voor het testen).
- De hoogte van de gymbal samenstel zodat de dopmoer is in contact met de bovenkant van de schijf en de gymbal arm waterpas.
- Pas de positie van de gymbal assemblage, zodat het contactpunt tussen de eikel moer en schijf is ongeveer 25 mm afstand van de rotatie centrum van de schijf. Draai alle bouten in de set-up om de stabiliteit te garanderen.
- Opgezet signaal generatie, signaalversterking, en data-acquisitie subsystemen.
- Sluit data-acquisitie systeem om een lab computer. Verbind de uitgang van de signaalgenerator aan de ingang van een elektrische versterker. Verbind de versterkeruitgang met de ingang draden van de piëzo-elektrische stang. Sluit de versterker monitoren het data-acquisitiesysteem.
- Sluit de load cell om een signaal conditioner, en sluit de uitgang van het signaal conditioner om het data-acquisitie systeem.
- Extra set-up.
- Sluit de luchtslang aan de lucht te winkelen. Bevestig het uiteinde van de slang aan het frame zodat de aftappunten in het piëzo-actuator. Tape de punt van thermokoppel aan de piëzo-actuator. Sluit het thermokoppel leads aan de lezer; hangen de lezer op het frame.
2. Pre-voorbereiding van de proef
- Kalibreer het toerental van de motor.
- Bevestig de magneet aan de rand van de boorkop. Plaats Hall-effect sensor dicht bij de boorkop. Verbind de uitgang van de Hall-sonde Gaussmeter die is verbonden met het data-acquisitiesysteem.
- Open de data-acquisitie software en beginnen met data-acquisitie. Zet de motor; draai de snelheid knop van de motor controller tot 10 (de laagste toerental van de motor zorgt). Nadat de motor draait 10 omwentelingen, uitschakelen van de motor. End data-acquisitie.
- Analyseer de opgeslagen gegevens; de tijd tussen twee pieken van het uitgangssignaal van de Gaussmeter is de tijd voor de motor te rottenaten een volledige omwenteling.
- Draai de knop 10-100 (de hoogste toerental van de motor levert) in stappen van 10; herhaal de stappen 2.1.2 tot 2.1.3.
- Plaats load sensor pad tussen de eikel moer en de schijf naar de normale kracht op het grensvlak te meten. Fijn machine het oppervlak van het testen schijven met behulp van een draaibank.
- Reinig de eikel moer en schijf onmiddellijk worden getest vóór de test.
- Doe plastic handschoenen en gezicht mask.Prepare stukken lab doekjes; vouw ze in 1 inch pleinen. Spray ethanol op het weefsel pleinen; veeg het oppervlak van de eikel moer en schijf met hen.
- Installeer de schone eikelnoot en disc.
- Rijg de eikel moer op de piëzo-actuator, draai deze met een steeksleutel. Plaats de disc in de boorkop; stel de positie om ervoor te zorgen dat het topje van de eikel moer in contact is met het schijfoppervlak.
- Lijn de bovenkant van de schijf en de gymbal arm. Draai de boorkop zodat de schijf stevig wordt vastgehouden.
- Meet de slingering van de schijf rotatie.
- Installeer laser verplaatsingssensor in een inrichting en plaats het armatuur naast de tribometer. Stel de hoogte en hoek van de sensor zodat de schijf ligt binnen het bereik van de sensor en de laserstraal loodrecht op de schijf.
- Verbind uitgang van de sensor aan het data-acquisitiesysteem. Start de data-acquisitie. Zet de motor en draai de disc voor 10 omwentelingen; uitschakelen van de motor. End data-acquisitie.
3. Voer Testen
- Proeven met ultrasone trillingen.
- Hang 2 N gewicht op een haak die aansluit op de gymbal arm door draad en twee katrollen. Het gewicht wordt gebruikt om een normale kracht worden uitgeoefend tussen de dopmoer en de schijf.
- Hangen nog 2 N gewicht op de andere haak die aansluit op de gymbal arm naar een horizontale pretentie om de meetcel te bieden.
- Stel het signaalgenerator een continu sinusvormig signaal met DC offset geven van 3 V, amplitude van 3 V, en de frequentie van 22 kHz (de resonantiefrequentie van het piëzo-actuator). Merk op dat de 3 V offset wordt gebruikt om de spanning in het piëzo-actuator te voorkomen.
- Start data-acquisitie (verminderde wrijving kracht). Zet de versterker en draai de gain knop naar 15, wat overeenkomt met een werkelijke winst van 4,67 (de nummers op de gain knop zijn willekeurig).
- Zet de motor; Stel de rotatiesnelheid naar 6,67 omwentelingen per minuut met een lineaire snelheid van 20,3 mm / sec bieden. Voer de test van 4 uur.
- Schakel de motor en versterker, en dan stoppen de data-acquisitie. Verwijder de geteste eikel moer en schijf van de set-up; Herhaal de stappen 2,3-2,5 voor nieuwe eikelnoot en de schijf te installeren.
- Herhaal de stappen 3.1.1 tot en met 3.1.6. In stap 3.1.5, stelt het toerental tot 13,3 tpm en 28,7 rpm aan lineaire snelheden van 40.6 mm / s en 87 mm / sec, respectievelijk bieden; lopen de tests voor 2 en 0.94 uur correspondingly.
- Proeven zonder ultrasone trillingen.
- Herhaal stap 3.1.6 om eikel noten en schijven te wijzigen. Herhaal de stappen 3.1.1 tot 3.1.6 met het signaal generator en signaalversterker uit (de wrijving gemeten intrinsieke wrijving).
4. Optische Profilometer Metingen
- Meting voorbereiding
- Reinig de schijven onmiddellijk voor metingen met behulp van stap 2.3. Voeg acht gelijkmatig markeringen rond de rand van de schijf. Open de profilometer software.
- Til de lens, zodat er voldoende ruimte tussen de lens en de sample-platform. Het niveau van de steekproef platform. Leg een stuk lab te vegen op het platform.
- Plaats voorzichtig het monster bovenop het weefsel met een van de acht tekens naar de voorkant van de profilometer.
- Meting instellingen.
- Kies VSI (Vertical-Scanning Interferometry) als het type verwerking. Selecteer 5X lens voorgroot gezichtsveld en algemene vorm. Pick 0.55X vergroting voor een scan gebied van 1,8 mm bij 2,4 mm.
- Kies 1X scansnelheid. Stel scan bereik -100 m tot 100 m. Breng de lens naar beneden in de richting van het monster, tot er een wazig beeld op het scherm. Stel de hoogte van de lens tot het beeld duidelijk.
- Kies 2 als het aantal scans tot gemiddeld voor elke meting. Klik op de meting knop.
- Procedures nameting.
- Gebruik de visie recept dat in de software om de ruwe beeld corrigeren voor kanteling van de gehele monster gedefinieerd. Open de analyse toolbox in de software.
- Het verkrijgen van de gemeten waarden van de ruwheid "Basic Stats" punt. Het verkrijgen van de gemeten volume verlies van de slijtage litteken in het scan gebied van de "Volume" punt.
- Sla de afbeeldingen van 1D profielen in x- en y-richtingen, de 2D-profiel, het 3D profiel, evenals de tabel van ruwheden. Draai het monster rechtsom tot the volgende punt wordt geconfronteerd met de voorzijde van de profilometer.
- Herhaal de stappen 4,2-4,3 voor de resterende 7 cijfers.
- Herhaal de stappen 4.1. 4,4 op alle zes schijven.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
De representatieve metingen hier gepresenteerd werden verkregen van de gemodificeerde tribometer figuur 1. De piëzoelektrische aandrijver worden trillingen met een amplitude van 2,5 urn bij een frequentie van 22 kHz. Om de afhankelijkheid van wrijving en slijtage bestuderen korting op lineaire snelheid werden drie verschillende snelheden (20,3, 40,6 en 87 mm / sec) op de schijf aangebracht door het veranderen van de rotatiesnelheid van de motor. Voor alle drie de groepen, het aantal omwentelingen van de schijf en de vluchttijd van de pen werden gekozen als 1600 en 292,5 m, respectievelijk. De rotatie nominale diameter was 50 mm. Andere parameters zoals normaalkracht, trillingsfrequentie en trillingsomvang bleef hetzelfde voor alle testen (tabel 1).
De wrijvingskracht is bemonsterd op een frequentie van 400 Hz gebruik 2 sec sampling windows. Figuur 2 toont typische data vanuit één bemonsteringsperiode. De waargenomen fluctuation in wrijvingskracht wordt toegeschreven aan stick-slip. De gemiddelde waarden van wrijvingskracht werd berekend en uitgezet tegen pin reisafstand figuur 3. Intrinsieke wrijvingskrachten worden vertegenwoordigd door punten in de figuur, terwijl de wrijvingskrachten met ultrasone trillingen worden getoond met "x" markers. Groen, blauw en rood worden respectievelijk gebruikt voor de test gegevens op 20,3 mm / sec, 40,6 mm / sec, en 87 mm / sec. Wrijvingskracht van elke test blijft vrijwel constant eens steady-state werking wordt bereikt.
Disc slingering veroorzaakt inertiële versnelling van verticale beweging van de pen en gymbal assemblage, wat resulteert in verandering van de normaalkracht. Dientengevolge, de gemeten wrijvingskracht fluctueert zie figuur 3. Benadrukt wordt dat de fluctuaties waargenomen in figuur 2 is te wijten aan stick-slip. Gelet op de gemiddelde waarde van de wrijvingskracht nadat het systeem is steady state werking, figuur bereikte3 toont dat de wrijvingskracht groter bij hogere lineaire snelheden of ultrasone trillingen hebben op het systeem. Dit resultaat is consistent met eerdere onderzoeken blijkt dat de kracht-speed curve een positieve helling lage lineaire snelheid 19-21.
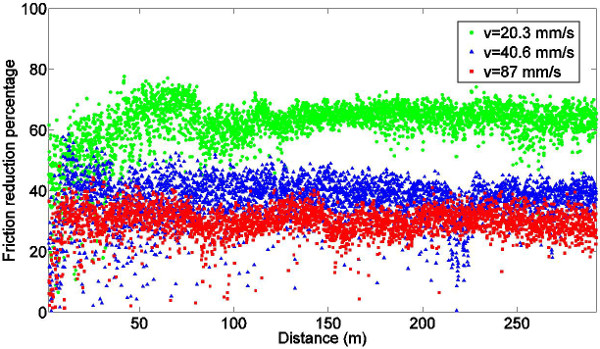
De wrijving reductiepercentage wordt gedefinieerd als
1. 
waar is de intrinsieke wrijvingskracht (kracht zonder ultrasone trillingen, gemeten in stap 3.2) en is de wrijvingskracht met ultrasone trillingen (gemeten in stap 3.1.4). Het reductiepercentage van elke lineaire snelheid uitgezet tegen de afstand die de pen in figuur 4. Ultrasone trillingen de steady-state wrijvingskracht voor drie lineaire snelheden getest, maar het percentage afneemt als de lineaire snelheid toeneemt.
Gemeten steady-state wrijvingkrachten, stabilisatie afstand en wrijving reductiepercentage zijn opgesomd in tabel 2. ultrasoontrillingen vergemakkelijkt het proces van het afbreken van de oxidelaag en het vormen van stabiele contacten tussen de pin en de schijf, wat leidt tot een kortere afstand van de wrijvingskracht steady bereiken toestand wanneer ultrasone trillingen aanwezig zijn.
Slijtage plaatsvindt tussen het oppervlak van materialen met verschillende hardheden. 22 Door het verschil in hardheid van roestvrij staal (700 tot 950 kg / mm2) en aluminium (45 tot 50 kg / mm2), slijtage geïdentificeerd als straalmiddel in dit onderzoek. Slijtage groeven op de schijven worden getoond in Figuur 5. Beelden A, C, E corresponderen met testen met ultrasone trillingen, terwijl de beelden B, D, F zijn gegevens zonder trillingen. Te zien is dat grooves lijken ongelijk en niet-reflecterende bij ultrasone trillingen hebben.
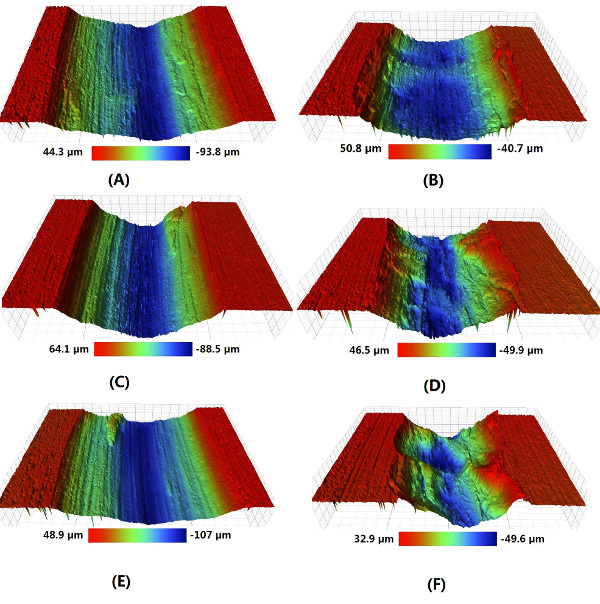
Driedimensionale profiles, oppervlakteruwheid waarden en volume verliezen groeven worden verkregen uit profilometer scans. 3-D profiel van de groeven met ultrasone trillingen (Figuur 6 B, D, F) lijken smaller, minder soepel en ondieper dan die zonder trillingen (figuur 6 A, C, E), wat suggereert dat ultrasone trillingen veroorzaken slijtage verminderen .
Om de mate van slijtage vermindering kwantificeren, slijtage wordt gedefinieerd als
2. 
Waar is disc volumeverlies in 3 mm (gemeten in stap 4.3.2) en is de afstand die de pen in meters (tabel 1). Net als de wrijving reductiepercentage wordt de slijtage reductiepercentage gedefinieerd als
3. 
waar is de intrinsieke slijtage (zonder ultrasone trillingen) en is de slijtage tariefultrasone trillingen toegepast. Gegevens in Tabel 3 laat zien dat de laagste oppervlakteruwheid parameters slijtage kleiner als ultrasone trillingen aanwezig, die een indicator van slijtage verminderen. De slijtage reductiepercentage blijft nagenoeg constant als de snelheid toeneemt.





in-page = "always"> 
Figuur 1. Experimentele set-up: (A) de totale tribometer; (B) motor; (C) onderstel, (D) gedetailleerde gymbal vergadering; (E) piëzo-elektrische actuator; en (F) systeem schema. (Dit cijfer is aangepast van 13.)

Figuur 2. Typische gegevens van de ene bemonstering venster. (Dit cijfer is aangepast van 13.) Klik hier om een grotere versie van deze figuur te bekijken.
931fig3.jpg "/>
Figuur 3. Wrijving krachten met en zonder ultrasone trillingen op verschillende snelheden. (Dit cijfer is aangepast van 13) Klik hier om een grotere versie van deze figuur te bekijken.

Figuur 4. Gemeten wrijvingsreductie berekend Eq. (1). (Dit cijfer is aangepast van 13) aub klik hier om een grotere versie van deze figuur te zien.

Figuur 5. Draag groeven verkregen met ultrasone vibr. ties (A, C en E) en zonder ultrasone trillingen (B, D en F) Elke kolom correspondeert met een lineaire snelheid: 20,3 mm / sec (A, B); 40,6 mm / sec (C, D); en 87 mm / sec (E, F). (Dit cijfer is aangepast van 13)

Figuur 6. 3D profielen slijtage groeven verkregen zonder ultrasone trillingen (A, C en E) en met ultrasone trillingen (B, D en F) Elke rij een lineaire snelheid. 20,3 mm / sec (A, B); 40,6 mm / sec (C, D); en 87 mm / sec (E, F). (Dit cijfer is aangepast van 13) aub klik hier om een grotere versie van deze figuur te zien.
| Parameter | Waarde | ||
| Groep | 1 | 2 | 3 |
| Lineaire snelheid (mm / sec) | 20.3 | 40.6 | 87 |
| Looptijd (h) | 4 | 2 | 0.93 |
| Afstand afgelegd door pen (m) | 292,5 | ||
| Revolutions | 1600 | ||
| Pin materiaal | RVS 316 | ||
| Disc materiaal | Aluminium 2024 | ||
| Nominale normale kracht (N) | 3 | ||
| Disc opraken (mm) | 0,0286 | ||
| US frequentie (kHz) | 22 | ||
| US amplitude (pm) | 2.5 | ||
| Nominale Groove diameter (mm) 50 | |||
| Insteltemperatuur (° C) | 21 ± 1 | ||
| Nominale actuator (° C) | 31 ± 1 | ||
| Milieu | Laboratorium lucht | ||
| Sampling frequentie (Hz) | 400 | ||
Tabel 1. Parameters gebruikt in tribometer testen. (Deze tabel is gewijzigd van 13)
| Lineaire snelheid (mm / sec) | VS | Steady state wrijving (N) | Afstand tot steady state (m) te bereiken | Verminderde wrijving (%) |
| 20.3 | Nee | 1,024 ± 0,063 | 4.17 | 62,22 |
| Ja | 0,379 ±0,041 | 2.78 | ||
| 40.6 | Nee | 1,201 ± 0,055 | 11.61 | 36,11 |
| Ja | 0,748 ± 0,035 | 7.21 | ||
| 87 | Nee | 1,472 ± 0,064 | 8.94 | 29.32 |
| Ja | 1,041 ± 0,056 | 4.64 |
Tabel 2. Steady state wrijvingskrachten, afstanden tot steady state, en wrijving reductie te bereiken. (Deze tabel is gewijzigd van 13)
| Lineaire snelheid (mm / sec) | VS | Ra (pm) | Rq (pm) | Rt (pm) | Draag rate (3 mm / m) | Aantal contacten | |
| 20.3 | Nee | 18,829 | 21,421 | 124,35 | 2,237 x 10 -2 | 45,76 | |
| Ja | 17,238 | 18,975 | 87,011 | 1,214 x 10 -2 | 3,17 x 10 8 | ||
| 40.6 | Nee | 21,647 | 22,673 | 109,28 | 2,581 × 10 -2 | 48,18 | |
| Ja | 17,289 | 19,922 | 106,42 | 1,338 × 10 -2 | 1,58 x 10 8 | ||
| 87 | Nee | 19,825 | 21,921 | 130,52 | 2,43 x 10 -2 | 48,63 | |
| Ja | 17,606 | 111,25 | 1,248 x 10 -2 | 7,39 x 10 8 |
Tabel 3. Vergelijking van slijtage tarief, aantal contacten en oppervlakteruwheid parameters (rekenkundig gemiddelde; Root Mean kwadraat, maximale hoogte van het profiel) (Deze tabel is gewijzigd van 13).
Subscription Required. Please recommend JoVE to your librarian.
Discussion
Experimenten werden uitgevoerd met het protocol om het effect van de lineaire snelheid op ultrasone wrijving en slijtage verminderen bestuderen. De metingen tonen aan dat ultrasone trillingen effectief verminderen wrijving en slijtage op drie lineaire snelheden. In overeenstemming met eerdere waarnemingen, de hoeveelheid wrijvingsvermindering daalt van 62,2% naar 20,3 mm / sec tot 29,3% bij 87 mm / sec. Slijtage reductie is verwaarloosbaar met wisselende lineaire snelheid (45,8% tot 48,6%).
Materiaaleigenschappen zoals de Young's modulus en treksterkte kan veranderen wanneer ultrasone golven worden uitgezonden door het materiaal. Dit wordt vaak aangeduid als ultrasone verweking 23. In deze studie, vanwege de stijfheid tussen de piëzo-actuator en andere delen van de opstelling, de 22 kHz trillingen door de actuator niet aan de overige deel van proefopstelling, hoewel een trillingsmodus van de structuur op ongeveer 100 Hz was opgewonden toen ultrasone vibrantsoenen toegepast. Op het grensvlak tussen de pin en de schijf, ultrasone trillingen veroorzaken warmte die temperatuurstijging aan het grensvlak veroorzaakt. Op basis van experimenten uitgevoerd door Dong en Dapino, de temperatuurstijging in het gebied dat verwaarloosbare veranderingen materiaaleigenschappen veroorzaakt.
Een beperking van dit experiment is dat er geen mechanisme om disc wobble, die verticale beweging van de pen, gymbal arm en gewicht kan leiden elimineren. Versnelling van de bewegende massa leidt tot variaties van de werkelijke normaalkracht aangebracht bij het grensvlak, waardoor de gemeten wrijvingskrachten. Daarom is het essentieel dat de motoras, gleufas, klem, en de schijf zijn vlak. Experimentele variabiliteit kan worden verlaagd wanneer de hoeveelheid slingering wordt geminimaliseerd.
Het is ook van cruciaal belang om stevig draai de eikel moer aan de piëzo-elektrische aandrijving, zodat de eikel moer niet los tijdens de test doet geworden. Ultrasonische trillingen effectief om de wrijvingskracht te verlagen als de trillingen niet naar de interface worden overgedragen. Indien de wrijvingskracht plotseling springt naar een hoger niveau tijdens de proef, is het zeer waarschijnlijk vanwege een losse verbinding tussen de dopmoer en de actuator. Dit probleem gaat gepaard met een zoemend geluid, zodat het gemakkelijk kan worden opgespoord.
Een elektrisch aangedreven piëzo-actuator genereert warmte als de temperatuur snel kan toenemen als geen koeling wordt toegepast. Het is essentieel om de luchtstroom naar een passend aanpassen aan de warmte af en houdt de temperatuur van de actuator constant. Zelfs wanneer de piëzo-actuator is uitgeschakeld voor proeven zonder ultrasone trillingen, moet dezelfde luchtstroom nog steeds worden toegepast, zodat het testen voorwaarden hetzelfde blijven voor alle tests.
Vergeleken met eerder werk, dit protocol studies wrijving en slijtage gelijktijdig in dezelfde proef, die niet systematisch eerder gedaan. De gymbalsamenstel maakt een directere aanpak wrijvingskrachten meten het grensvlak dan andere methoden die hetzij afkomstig wrijving van een gemeten bedieningskracht of andere fysische parameters, zoals vervorming of torsie. De schijf houder ontworpen en gebouwd voor deze tests maakt handig verandering van de monsters met verschillende afmetingen, materialen, en de oppervlakte ruwheden. De optische profilometer biedt informatie, zoals 3D-profielen en oppervlakteruwheid om slijtage vermindering, die meer gedetailleerd inzicht in slijtage littekens biedt dan volume verlies of gewichtsverlies metingen te bestuderen. Met deze voordelen kan dit protocol worden gebruikt om de afhankelijkheid van ultrasone onderzoeken wrijving en slijtage vermindering op veel andere parameters zoals normaalspanning, hardheid van het materiaal, oppervlakteruwheid en vibratie amplitude.
Subscription Required. Please recommend JoVE to your librarian.
Acknowledgments
De auteurs willen graag Tim Krantz van NASA Glenn en Duane Detwiler van Honda R & D te erkennen voor hun technische ondersteuning en bijdragen in natura. Financiële steun voor dit onderzoek werd verstrekt door de lidorganisaties van de Smart Vehicle Concept Center (www.SmartVehicleCenter.org), een National Science Foundation Industrie / University Cooperative Research Center (I / UCRC). SD wordt ondersteund door een Smart voertuigconcepten Graduate Fellowship en een universiteit Fellowship van de Ohio State University Graduate School.
Materials
| Name | Company | Catalog Number | Comments |
| DC Motor | Minarik | SL14 | |
| Electrical amplifier | AE Techron | LVC5050 | |
| Signal conditioner | Vishay Measurements Group | 2310 | |
| Signal generator | Agilent | 33120A | |
| Piezoelectric stack | EDO corporation | EP200-62 | |
| Load cell | Transducer Techniques | MLP-50 | |
| Load sensor pad | FlexiForce | A201 | |
| Laser meter | Keyence corporation | LK-G32 | |
| Hall-effect probe and gaussmeter | Walker Scientific, Inc. | MG-4D | |
| Data acquisition module | Data Physics | Quattro | |
| Data acquisition software | Data Physics | SignalCalc Ace | |
| Thermocouple reader | Omega | HH22 | |
| Optical profilometer | Bruker | Contour GT | |
| Profilometer operation software | Bruker | Vision 64 |
References
- Bhushan, B. Introduction to tribology. , John Wiley & Sons. New York. (2002).
- Severdenko, V., Klubovich, V., Stepanenko, A. Ultrasonic rolling and drawing of metals. , Consultants Bureau. New York and London. (1972).
- Taylor, R., Coy, R. Improved fuel efficiency by lubricant design: a review. Proc. Instit. Mech. Eng., Part J: J Eng. Tribol. 214 (1), 1-15 (2000).
- Littmann, W., Storck, H., Wallaschek, J. Sliding friction in the presence of ultrasonic oscillations: superposition of longitudinal oscillations. Arch. Appl. Mech. 71 (8), 549-554 (2001).
- Littmann, W., Storck, H., Wallaschek, J. Reduction in friction using piezoelectrically excited ultrasonic vibrations. Proc. SPIE. 4331, (2001).
- Bharadwaj, S., Dapino, M. J. Friction control in automotive seat belt systems by piezoelectrically generated ultrasonic vibrations. Proc. SPIE. 7645, 7645E (2010).
- Bharadwaj, S., Dapino, M. J. Effect of load on active friction control using ultrasonic vibrations. Proc. SPIE. 7290, 7290G (2010).
- Kumar, V., Hutchings, I. Reduction of the sliding friction of metals by the application of longitudinal or transverse ultrasonic vibration. Tribol. Int. 37 (10), 833-840 (2004).
- Pohlman, R., Lehfeldt, E. Influence of ultrasonic vibration on metallic friction. Ultrasonics. 4 (4), 178-185 (1966).
- Popov, V., Starcevic, J., Filippov, A. Influence of Ultrasonic In-Plane Oscillations on Static and Sliding Friction and Intrinsic Length Scale of Dry Friction Processes. Tribol. Lett. 39 (1), 25-30 (2010).
- Dong, S., Dapino, M. J. Piezoelectrically-induced ultrasonic lubrication by way of Poisson effect. Proc. SPIE. 8343, 83430L (2012).
- Dong, S., Dapino, M. J. Elastic-plastic cube model for ultrasonic friction reduction via Poisson effect. Ultrasonics. 54 (1), 343-350 (2014).
- Dong, S., Dapino, M. J. Wear Reduction Through Piezoelectrically-Assisted Ultrasonic Lubrication. Smart. Mater. Struct. 23 (10), 104005 (2014).
- Chowdhury, M., Helali, M. The effect of frequency of vibration and humidity on the wear rate. Wear. 262 (1-2), 198-203 (2014).
- Bryant, M., Tewari, A., York, D. Effect of Micro (rocking) vibrations and surface waviness on wear and wear debris. Wear. 216 (1), 60-69 (1998).
- Bryant, M., York, D. Measurements and correlations of slider vibrations and wear. J. Tribol. 122 (1), 374-380 (2000).
- Goto, H., Ashida, M., Terauchi, Y. Effect of ultrasonic vibration on the wear characteristics of a carbon steel: analysis of the wear mechanism. Wear. 94, 13-27 (1984).
- Goto, H., Ashida, M., Terauchi, Y. Wear behaviour of a carbon steel subjected to an ultrasonic vibration effect superimposed on a static contact load. Wear. 110 (2), 169-181 (1986).
- Robinowicz, E. The friction and wear of materials. , Wiley. New Jersey. (1965).
- Bowden, F., Freitag, E. The friction of solids at very high speeds. Proc. R. Soc. A. 248 (1254), 350-367 (1985).
- Burwell, J., Rabinowicz, E.
- Cocks, M.
- Rusinko, A. Ultrasound and Irrecoverable Deformation in Metals. , LAP Lambert Academic Publishing. Saarbrücken. (2012).

{kind=link}
{kind=link}