

Summary
Échographie 3D imaging (3DUS) permet de morphométrie rapide et rentable des tissus musculo-squelettiques. Nous présentons un protocole permettant de mesurer la longueur de volume et fascicules du muscle à l’aide de 3DUS.
Abstract
L’objectif du développement de l’échographie 3D imaging (3DUS) est à l’ingénieur une modalité pour effectuer l’analyse 3D échographie morphologique des muscles humains. Images 3DUS sont construits à partir de calibré à la volée 2D mode B images échographiques, qui sont placés dans un tableau de voxel. L’échographie (US) permet la quantification de la taille de muscle, fascicule longueur et angle de pennation. Ces variables morphologiques sont des déterminants importants de la gamme de force et longueur musculaire d’effort de force. Le protocole présenté décrit une approche pour déterminer la longueur de volume et fascicule de m. vastus lateralis et m. gastrocnémien médial. 3DUS facilite la normalisation à l’aide de références anatomiques 3D. Cette approche fournit une approche rapide et rentable pour quantifier la morphologie 3D dans les muscles squelettiques. En soins de santé et des sports, information sur la morphométrie des muscles est très précieuse au diagnostic et/ou des évaluations de suivi après traitement ou de formation.
Introduction
En soins de santé et des sports, informations sur la morphologie des muscles sont très précieuses au diagnostic et/ou des évaluations de suivi après traitement ou de la formation1. L’échographie (US) est un outil couramment utilisé pour la visualisation des structures de tissus mous dans les maladies de muscle2, maladies graves3,4, maladies cardiovasculaires5, troubles neurologiques,6, 7,8et les effets de l’entraînement physique6,9,10. L’imagerie US permet de quantification de la taille de muscle, fascicule longueur et angle de pennation. Ces variables morphologiques sont importants déterminants de la gamme de force et de la longueur musculaire de forcer l’effort11,12,13,14,15.
Actuellement, US d’imagerie mesures sont pour la plupart réalisées en images 2D, avec le choix de l’examinateur une vraisemblablement, l’orientation appropriée et l’emplacement de l’échographie sonde. Ces méthodes 2D restreignent les mesures morphologiques au plan d’une image, lorsque le paramètre d’intérêt ne peut pas être présent à bord de cet avion. Analyse morphologique exige une approche 3D, fournissant hors-plan des mesures à l’aide de points de référence 3D. Une telle représentation morphologique 3D des tissus mous est connue pour être fournies par l’imagerie par résonance magnétique (IRM)16,17,18,19,20. Cependant, l’IRM est coûteux et pas toujours disponible. Visualisation des fibres musculaires exige également, les séquences spéciales de MRI, comme diffusion tensor imaging (DTI)21. Une alternative rentable au MRI est échographie 3D (3DUS). L’approche de 3DUS offre plusieurs avantages par rapport aux techniques d’IRM, par exemple, il impose moins manque d’espace pour le positionnement de l’objet au cours de l’examen. 3DUS imagerie est une technique séquentiellement, capturer des images 2D (mode B US) et leur positionnement dans un volume élément (voxel) tableau22,23,24. Le processus de reconstruction de l’image 3DUS se compose de cinq étapes : (1) capture une série d’images à la volée d’US 2D ; (2) suivi de la position de la sonde américaine, à l’aide d’un système de Motion Capture (MoCap) ; (3) synchronisation de la position de MoCap et images US ; (4) calcul de l’emplacement et l’orientation des images ultrasons dans le tableau de voxel en utilisant un système équilibré de référence ; et (5) en plaçant ces images dans ce tableau de voxel.
L’approche de 3DUS a été appliquée avec succès pour l’évaluation de la morphologie du muscle squelettique15,25,26,27,28,29. Cependant, précédentes approches7,15,25,30 se sont révélés lourde, beaucoup de temps et techniquement limitée, car seulement de petits segments de gros muscles pourraient être reconstruites.
Afin d’améliorer l’approche de 3DUS, un nouveau protocole de 3DUS a été développé qui permet la reconstruction des muscles complètes dans un court laps de temps. Cet article du protocole décrit l’utilisation de 3DUS d’imagerie pour la morphométrie du m. vastus lateralis (VL) et m. gastrocnémien médial (GM).
Protocol
Toutes les procédures impliquant des sujets humains ont été approuvés par le Comité d’Ethique médicale de le VU medical center, Amsterdam, Pays-Bas.
1. instrumentation
- Connecter l' appareil à ultrasons à l' ordinateur de la mesure. Si nécessaire, utilisez le cadre-grab matériel et/ou logiciel pour stocker les images d’échographie séquentielle.
Remarque : Une sonde linéaire-groupe de 5 cm (12,5 MHz) est utilisée pour générer des images de mode B (25 Hz). Avant chaque mesure, imagerie profondeur, fréquence acoustique et la puissance sont optimisés afin de visualiser les interfaces d’extra - et des tissus conjonctifs par voie intramusculaire. Pendant la mesure, ces paramètres ne sont pas modifiés. - Connectez le système MoCap à l’ordinateur de la mesure.
- Rigidement connecter un marqueur de cluster de MoCap à la sonde d’échographie pour suivre la position et l’orientation de la sonde américaine.
- Connecter le dispositif de synchronisation (cristal piézo-électrique) à l’entrée de déclenchement du système MoCap.
Remarque : L’Activation de l’appareil de synchronisation Active momentanément le cristal piézo-électrique, envoyant des ondes sonores vers le transducteur. Les reçu soundwaves créer un artéfact distinct à l’image des Etats-Unis lors de l’ouverture du système (Figure 1A, flèche). - Remplir le cadre sur mesure d’étalonnage (fantôme) avec de l’eau.
2. calibrer
Remarque : Effectuer un étalonnage spatial pour calculer une matrice de transformation (àTde) à partir des images d’américains en ce qui concerne le système de coordonnées de sonde. Ce processus de calibration a été décrit précédemment22. S’il vous plaît voir ci-dessous pour une brève description.
- Place le fantôme rempli d’eau, tenant un crosswire (c.-à-d. les fils deux passage submergé) à une position connue dans le système de coordonnées fantôme (Phxyz Figure 1B, flèche), sur une surface stable.
- Mesurer la température de l’eau avec un thermomètre.
- Utilisez l’outil pointeur de MoCap pour enregistrer la position et l’orientation du fantôme dans le repère global (Gl).
- Commencer l’échantillonnage d’image US et activer d’acquisition de données MoCap (décrite à l’étape 3.3.3).
- Plonger la tête de la sonde américaine (Pr) dans l’eau. Traduire et faire pivoter la sonde US pour 40 s (échantillonnage à 25 Hz) dans toutes les directions, maintenir la visibilité de la crosswire dans les images US (Im).
- Arrêter d’acquisition de données.
- Synchroniser les données MoCap et images US en identifiant la première image US contenant l’artefact de créé par cristal piézo-électrique et rogner la séquence d’images US en conséquence (décrit à l’étape 3.4.1.1).
- Identifier les images aux États-Unis dans lequel la crosswire est clairement visible et suivre la position de la crosswire dans ces images US (j’aiImxyz) et de corriger la position pour la température de l’eau.
- Déterminer la position de la crosswire en ce qui concerne le déplacement Pr par une série de transformations de Ph à Pr (équation 1) à la fois les instances (i = 1 à n) correspondant à l’identification de crosswire dans étape 2.8.

- Calculer Im à la matrice de transformation de Pr (PrTIm) en résolvant l’équation 2, mis en correspondance avec toutes les identifications de la crosswire Im (mesurée à l’étape 2,8) à ce moment (j’ai = 1 : n) les coordonnées de la crosswire en Pr (calculé à l’étape 2,9).




Figure 1 : schéma de l’algorithme de 3DUS. (A) système de Motion Capture (MoCap) est utilisé pour suivre un ensemble de marqueurs rigidement à la sonde d’échographie, dans le repère global (Gl). Synchronisation des données MoCap et l’échographie est accomplie en faisant usage d’un artefact (flèche) introduit par Optotrak déclenchée cristal piézo-électrique. (B), la position et l’orientation du système de coordonnées image ultrasonore (Im) est calculée par rapport au repère de la sonde (Pr) en identifiant un point connu au sein du Pr et Im. À cette fin, un fantôme sur-mesure est utilisé rempli d’eau, tenant un crosswire (c'est-à-dire deux fils de passage submergé) à une position connue dans le système de coordonnées fantôme (Ph). (C) avec une série de transformations, ce point connu est calculé dans la Pr. (D) avec une série complète des transformations connues, les images de l' Im peuvent être transformés en n’importe quel système de coordonnées de tableau de voxel (Va). S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
3. plan expérimental
Remarque : Le protocole expérimental décrit deux protocoles couramment pratiquées impliquant l’imagerie 3DUS, c'est-à-dire la morphométrie de GM et VL (Figure 2A).
- Sujet de positionnement
- Pour l’expérience de GM :
- Poser la question de mentir sujets sur la table d’examen avec les deux pieds surplombant le bord de la table.
- Aligner le bas de la jambe horizontalement, en plaçant une cale sous le tibia. Difficulté la cuisse à la table d’examen avec arrimage rembourré pour empêcher l’extension de genou pendant le protocole expérimental.
- S’adapter au pied de la jambe pour être analysés dans la semelle sur mesure31.
- Connectez la clé dynamométrique sur mesure avec un goniomètre attaché à la semelle31. Trouver l’angle de la semelle correspondant à un couple appliqué à l’extérieur, par exemple., 0 Nm (Figure 2A).
- Fixer la semelle dans le sens correspondant à l’instant de dorsiflexion net 0 Nm, à l’aide d’une tringle extensible qui est relié à la table (Figure 2A, flèche).
- Pour l’expérience de VL :
- Demandez les sujets se coucher en décubitus dorsal sur une table d’examen.
- La valeur de l’angle de flexion du genou (c.-à-d. opérationnalisé comme l’angle entre les lignes reliant les centres de la malléole externe avec epicondylus lateralis et le second avec le trochanter majeur) à 60 °, Positionner les partie inférieure des jambes sur un support.
- Placez un faisceau en forme triangulaire sous les fesses pour empêcher le mouvement de hanche.
- Fixer le bas de la jambe à l’appui avec deux systèmes d’arrimage rembourrée afin d’empêcher le mouvement des jambes durant le protocole expérimental.
- Régler l’angle de hanche (c.-à-d. opérationnalisé comme l’angle entre les lignes reliant les os coracoides avec le trochanter majeuret le second avec l' épicondyle femoralis lateralis) à 95 °, en changeant l’angle de la retour de prise en charge de la table d’examen.
Remarque : Cette pose décrite a été choisie, car elle ressemble à des angles articulaires pendant optimal isométrique genou extension Mensurations32,33.
- Pour l’expérience de GM :
- Localisation de sites osseux et de la région d’intérêt (ROI)
Remarque : Ceci est fait pour l’orientation de l’échographie 3D et à la quantification études expérimentale de cuisse, jambe et pied posture du sujet. Identifier et relever les positions des points de repère anatomiques osseuses dans le repère global à l’aide de l’outil pointeur de MoCap.- Pour l’expérience de GM :
- Identifier les points de repère suivants par palpation et les marquer à l’aide d’un marqueur chirurgical de la peau : les aspects plus en vue dorsales de l’épicondyle médial et latéral du fémur et les centres de la malléoles, du tibia et du péroné.
- À l’aide de l’appareil américain, identifier et marquer à l’aide d’un marqueur chirurgical peau les points plus superficielles des condyles médial et latéral du fémur (sur la face dorsale de la jambe) et l’emplacement plus proximale de l’insertion du mécanisme mondial sur le calcanéum.
- Pour la mesure de la VL :
- Identifier les points de repère suivants par palpation et les marquer à l’aide d’un marqueur chirurgical de la peau : les malléoles médiales et latérales (voir ci-dessus) ; l’insertion plus proximale du tendon rotulien des tibias tuberositas; l’épicondyle médial et latéral (voir ci-dessus) ; l’apex de la patella et le plus d’insertion, proximale, médial et latéral limites sur la rotule ; et os coracoides sur l’épaule.
- Identifier avec le dispositif US et marquer l’aspect le plus superficiel du trochanter majeur et l’insertion plus proximale de la VL sur le trochanter majeur.
- Pour tous les muscles, utilisez l’outil pointeur de MoCap pour enregistrer les points de repère marqués (décrites dans les sections 3.2.1 et 3.2.2) dans le repère global. Déplacer l’outil pointeur de MoCap vers les repères anatomiques identifiés et utiliser le logiciel de MoCap pour enregistrer la position en appuyant sur le bouton « enregistrer ».
- L’échographie permet d’identifier la frontière muscle médial et latéral ; marquer les frontières médiales et latérales sur la peau à l’aide d’un marqueur chirurgical de la peau.
- Pour l’expérience de GM :
- Examen échographique 3D
- Instruire le sujet ne pas à se déplacer au cours de l’échographie 3D.
- Appliquer le gel d’échographie amplement sur le ROI pour assurer le bon contact entre la peau et la sonde américaine.
Remarque : Cette demande de gel permet de limiter la sonde pression et donc la déformation de tissu nécessaire pour obtenir une image claire des Etats-Unis. - Ouvrez le logiciel image grabber (p. ex., WinDV34) sur l’ordinateur de la mesure et commencer l’acquisition d’image US en cliquant sur le bouton « Enregistrer ».
- Par la suite, lancer et activer la collecte de données MoCap en appuyant sur le bouton « Démarrer » sur le dispositif de synchronisation ; Ceci active automatiquement le dispositif de synchronisation (c.-à-d. piezo cristal) situé à proximité de la sonde américaine, créant un artefact distinct dans l’image aux États-Unis à la demande de MoCap initiation (Figure 1A, flèche).
- En exerçant une pression minimale de sonde encore assurer la qualité de l’image, déplacez la sonde à une vitesse constante dans le ROI ; Ceci est dénommé un « coup de poing ». Assurez-vous que les images en US coupe claire anatomiques du muscle cible sont enregistrées.
- Examinez-le pour le mouvement du sujet lors de l’examen ; Si le sujet bouge, interrompre le balayage et répétez l’étape 3.3.1.
- Protocole de balayage pour l’expérience de GM
- Placez la sonde US proximalement aux condyles du fémur sur la face médiale de la cuisse. Effectuer un balayage (tel que décrit dans les sections 3.3.1 - 3.3.5) dans le sens proximo-distale le long de la frontière médiale de la GM, garantissant une visibilité dans les images en coupe anatomiques de la frontière médiale de GM et le tendon d’Achille, tout le chemin vers le bas à ses insertion sur le calcanéum.
- Ajouter des balayages supplémentaires (tel que décrit à la section 3.3.3 - 3.3.5) jusqu'à ce que le ROI tout est analysé et la frontière médiale du muscle est imagée complètement (Figure 2B). Utiliser la trace dans le gel du balayage précédent pour guider le prochain balayage, chevauchant légèrement (0,5 cm) la zone balayée précédente.
- Protocole de balayage pour l’expérience de VL
- Placez la sonde américaine sur la face latérale du plateau tibia. Recommencer un balayage en direction distale et proximale du bord latéral de la VL, assurer la visibilité de la bordure latérale de VL, tout le chemin jusqu'à l’origine sur le trochanter majeur.
- Ajouter des balayages supplémentaires (tel que décrit à la section 3.3.3 - 3.3.5) jusqu'à ce que le ROI tout est analysé et la frontière médiale de la VL est imagée complètement (Figure 2B). Utiliser la trace dans le gel du balayage précédent pour guider le prochain balayage, chevauchant légèrement (0,5 cm) la zone balayée précédente.
Remarque : Pendant le protocole de balayage, mouvement du sujet doit être évité, où mouvements affectent négativement positionnement des images 2D US dans le tableau de voxel. Le nombre de balayages est déterminé par la largeur de la sonde et la largeur du muscle cible. En général, avec une largeur de sonde de 4 cm et une largeur de muscle de 12 ou 18 cm, balayages 5 ou 7, respectivement sont nécessaires pour couvrir le retour sur investissement, y compris les frontières.

Figure 2 : Schéma du montage expérimental et balayages de la sonde d’échographie sur les muscles de la cible (m. gastrocnémien médial (GM) installation et configuration de m. vastus lateralis (VL)). (A) des configurations spécifiques conjointes du sujet pour les deux conditions expérimentales. Les objets affichés en vert sont réglables pour définir la position et l’orientation des membres. La flèche indique une tringle extensible qui est utilisée pour fixer l’angle de la semelle. (B) chemin des balayages multiples de la sonde au-dessus des régions d’intérêt. Les flèches bleues représentent les balayages unique au-dessus de la région d’intérêt. A gauche : balayages sur le GM ; A droite : balayages sur le VL. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
-
Reconstruction de tableau échographie 3D voxel
- Reconstituer un tableau de voxel simple 3DUS (3DUS image) d’un balayage unique sur la peau d’un ROI anatomique spécifique (par exemple, muscle, tendon) par bin-remplissage et retouches du tableau de voxel de 3DUS à l’aide d’un script personnalisé. Afin de reconstituer un tableau de voxel 3DUS, procédez comme suit après expérimentale.
- Synchroniser les données MoCap et images US en identifiant la première image US contenant l’artefact de créé par cristal piézo-électrique et recadrage des États-Unis séquence d’images en conséquence avec VirtualDub logiciel35. Tout d’abord, placez le curseur de sélection de cadre à l’image de départ identifié et appuyez sur le bouton « home » sur le clavier. Ensuite, déplacez le curseur vers la fin de la mesure (le dernier contact de la peau) et appuyez sur la touche « fin ». Appuyez sur la touche « F7 » pour exporter la séquence d’image recadrée.
- Définir un système de coordonnées de voxel tableau (Va) qui peut être rempli avec des images d’américains, à l’aide d’un script personnalisé. S’assurer que la Va est orientée selon la direction de balayage et dimensionné pour s’adapter à toutes les images d’US d’un balayage unique.
Remarque : Au début, Va comprend des voxels de forme rectangulaire, avec des axes plus longs dans la direction du balayage ; Cette forme améliore l’efficacité du remplissage. - Assigner les voxels dans la Va avec des valeurs de pixel gris des images américaines, à l’aide d’un script personnalisé. Ce processus est décrit comme la cartographie avant ou bin-remplissage (équation 3 ; Figure 1 C) 23 , 24.

Remarque : Cela montre avant cartographie 2D images US dans la Va , selon l’orientation et la position des images dans le système de coordonnées de Va. En bref, les positions de tous les pixels d’une image (Imxyz(1 :n)) en instance de temps (i), sont simultanément mappés vers l’avant dans le tableau de voxel. La procédure de remplissage de bac remplit uniquement les voxels adressés, laissant le non dédié voxels vide (c'est-à-dire noir).
Remarque : indique l’inverse de la matrice de transformation décrite précédemment (c'est-à-dire un Pr de la matrice de transformation Gl ).
indique l’inverse de la matrice de transformation décrite précédemment (c'est-à-dire un Pr de la matrice de transformation Gl ). - À l’aide d’un script personnalisé identifier les lacunes à l’intérieur du tableau de voxel (c.-à-d. noir voxels). Prendre les mesures suivantes à l’aide de traitement de l’image binaire :
- Créer un tableau rempli de bin binaires voxel dans lequel tous les voxels remplis sont étiquetés. Utiliser une dilatation image binaire et l’érosion, avec la structuration même de taille-élément, d’étiqueter tous les voxels pertinents (c'est-à-dire une valeur de gris voxels) à l’intérieur de la région numérisée. Détecter les lacunes en soustrayant le tableau rempli de bin binaires voxel (avec lacunes) les voxels pertinentes (pas d’écart).
Remarque : Les opérations ultérieures de dilatation et d’érosion sont des étapes de traitement d’images pour compléter les images binaires. En effectuant ces étapes une après l’autre, les limites extérieures demeurent tandis que les écarts à l’intérieur sont supprimés.
- Créer un tableau rempli de bin binaires voxel dans lequel tous les voxels remplis sont étiquetés. Utiliser une dilatation image binaire et l’érosion, avec la structuration même de taille-élément, d’étiqueter tous les voxels pertinents (c'est-à-dire une valeur de gris voxels) à l’intérieur de la région numérisée. Détecter les lacunes en soustrayant le tableau rempli de bin binaires voxel (avec lacunes) les voxels pertinentes (pas d’écart).
- Combler les lacunes identifiées à l’aide d’une « procédure d’inpaint » et entourent les voxels d’une valeur de gris36.
Remarque : Cette technique d’inpaint peut être utilisée pour : « combler les lacunes avec un interpolant lisse basé sur réduire au minimum la somme des carrés de la dérivée seconde de chaque voxel étiquetée mesurée par différences finies sur la grille »36. - Égaliser les dimensions de voxel de la Va par interpolation « bicubique » et enregistrez le tableau voxel sous une image .tiff empilées (image 3DUS).
- Reconstituer un tableau de voxel simple 3DUS (3DUS image) d’un balayage unique sur la peau d’un ROI anatomique spécifique (par exemple, muscle, tendon) par bin-remplissage et retouches du tableau de voxel de 3DUS à l’aide d’un script personnalisé. Afin de reconstituer un tableau de voxel 3DUS, procédez comme suit après expérimentale.
-
Reconstruction de balayages multiples
- Reconstruire tous les balayages individuels (voir section 3.4) couvrant un ROI plus grand selon le même système de coordonnées de Va pour fusionner plusieurs balayages.
- Créer un nouveau système de coordonnées de Va , dimensionné pour accueillir tous les balayages reconstituées individuels.
- Placez l’individuel Vaétape par étape dans la plus grande Va. Si un voxel est déjà affecté par un autre Va, ce voxel est remplacée uniquement si le nouveau voxel a un gris de valeur supérieures à 10 sur une échelle de 8 bits, sinon la nouvelle valeur de voxel gris est ignorée.

 indique l’inverse de la matrice de transformation décrite précédemment (c'est-à-dire un Pr de la matrice de transformation Gl ).
indique l’inverse de la matrice de transformation décrite précédemment (c'est-à-dire un Pr de la matrice de transformation Gl ).4. mesure des Variables de la morphologie du Muscle
-
Utiliser le Toolkit d’Interaction médical37 (MITK) pour charger l’image de 3DUS et de récupérer les coordonnées de l’origine, d’insertion et l’extrémité distale de la poitrine du muscle.
- Après le chargement de l’image 3D, définir le découpage à « Coupled crosshair rotation ». Aligner les axes avec muscle ou de structures osseuses pour extraire précisément les coordonnées.
NOTE : MITK est préféré à d’autres logiciels d’analyse d’imagerie 3D pour l’évaluation des points anatomiques, car il permet de voxel rapide et interactif tableau trancher dans toutes les directions (« rotation de couplage en forme de croix »), facilitant la procédure d’identification.
- Après le chargement de l’image 3D, définir le découpage à « Coupled crosshair rotation ». Aligner les axes avec muscle ou de structures osseuses pour extraire précisément les coordonnées.
-
Afin de mesurer le volume musculaire, utilisez MITK pour identifier les limites de ventre musculaire entre l’origine et l’extrémité distale de la poitrine du muscle. Utiliser la segmentation MITK intégrée manuellement segmenter les multiples coupes anatomiques uniformément répartis le long de la longueur du ventre muscle (Figure 3A).
- Ouvrez l’outil de « segmentation » et créer une « nouvelle segmentation ». Commencer à segmenter les limites musculaires identifiés dans un échantillon représentatif à mi-chemin le long du ventre de muscle. Appuyez sur « A » sur le clavier pour ajouter une segmentation manuelle et tirer en appuyant sur le bouton gauche de la souris et en déplaçant le curseur suivant les limites de muscle. De presse ' pour supprimer les pièces de la segmentation.
- Appuyez sur la touche correspondant au dernier mode sélectionné (c'est-à-dire « A » ou de ') pour déplacer le viseur d’autres sections le long du ventre de muscle. Répétez l’étape 4.2.1 pour segmenter la nouvelle section sélectionnée. Répétez cette étape pour au moins 6 fois, avant de poursuivre à l’étape suivante.
- La valeur « Interpolation » à « activer », revue de la segmentation proposée des limites musculaires (lignes jaunes) dans toutes les sections transversales le long de ventre du muscle.
- Ajouter les segmentations supplémentaires dans les sections où la segmentation proposée interpolée (ligne jaune) ne correspond pas à la limite de muscle dans l’image. Répétez l’étape 4.2.2.
- Appuyez sur le bouton « Confirmation pour toutes tranches » et sélectionnez le plan dans lequel les segmentations ont été faites.
- Enregistrer le volume binaire dans un fichier de données (NRRD) presque cru raster et calculer la taille du volume marqué à l’aide d’un script personnalisé.
- Trouver l’orientation de l’avion mi-longitudinal fascicle du ventre musculaire, contenant l’intégral de fascicules (Figure 3A)38.
Remarque : Le plan mi-longitudinal est défini par trois points. L’origine et l’extrémité distale de la poitrine de muscle sont les deux premiers points. Le troisième point se trouve dans une image anatomique transversale à mi-chemin entre l’origine et l’extrémité distale de la poitrine du muscle. Dans cette image anatomique transversale, le point médian entre les deux premiers points projetés sur la tangente de l’aponévrose distale des rendements un troisième point qu’ainsi que l’origine et distale du ventre muscle définit le plan mi-longitudinal. - Plan mi-longitudinal, mesurez la longueur de fascicules à une position prédéfinie normalisée entre l’origine et l’extrémité distale de la poitrine du muscle (par exemple, 50 %). Segmenter les limites musculaires. Placer une ligne à mi-chemin et tournez cette ligne jusqu'à ce qu’elle correspond à la direction des faisceaux sous-jacent. L’intersection de cette ligne avec les limites musculaires représente l’estimation de la longueur du fascicule (Figure 3B).
NOTE : Auparavant, il s’est avéré nécessaire de prendre en compte, parfois courbé, orientation de l’aponévrose distale38, comme on le voit dans une image transversale anatomique (Figure 3B), prise à mi-chemin entre origine et distale fin du ventre musculaire.

Figure 3 : schéma de l’analyse de 3DUS. (A) Identification et segmentation des limites dans une image transversale anatomique à mi-chemin le long du ventre muscle muscle cible. La ligne verte solide représente l’orientation du plan mi-longitudinal (c.-à-d. orienté perpendiculairement à l’orientation de l’aponévrose distale (ligne pointillée bleue). (B) mesure de la longueur de fascicule est réalisée dans le plan de milieu-longitudinal fascicle. La région rouge transparente est segmentée par identification des limites musculaires. Une ligne en pointillé jaune est placée à mi-chemin sur le ventre du muscle et tourner jusqu'à ce qu’elle correspond à la direction des faisceaux sous-jacent. L’intersection de cette ligne avec les aponévroses proximales et distales (relié par ligne jaune pleine épaisseur) représente l’estimation de la longueur du fascicule. La solide ligne verte représente la position et l’orientation du plan anatomique transversale. Haut : GM (m. gastrocnémien médial) et en bas : muscle VL (m. vastus lateralis). Les cases blanches pour échelle représentent 1 cm x 1 cm. s’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
Representative Results
La technique décrite 3DUS servait à recueillir des données morphologiques de la GM et la VL dans quatre cadavres humains mâles, l’âge à mort 76,8 ± 7,9 ans (moyenne ± écart-type). Les cadavres ont été obtenus par le programme de donation du département d’anatomie et neurosciences de la Vrije Universiteit Medical Center (VUmc), Amsterdam, Pays-Bas. Les corps ont été préservés en utilisant une méthode d’embaumement vise à maintenir les caractéristiques morphologiques du tissu39.
Avant la dissection, une image de 3DUS a été faite de la GM et la VL selon la méthodologie décrite. Au cours de la dissection, peau, tissu sous-cutané et fascia qui vient se superposer le GM et VL ont été supprimés. Une coupe mi-longitudinale a été coupée, prenant l’orientation de l’aponévrose distale en compte. À l’aide d’un pied à coulisse, la longueur du fascicule a été mesurée, à mi-chemin entre l’origine et l’extrémité distale de la poitrine du muscle. Par la suite, après ténotomie, le ventre musculaire a été disséqué et immergé dans une colonne d’eau calibré. À l’aide de ImageJ, les volumes ont été mesurées sur des photographies de la colonne d’eau avec et sans le ventre du muscle et volume musculaire a été calculer la différence de40. Volume et longueur du fascicule ont mesuré trois fois et on a calculé les valeurs moyenne et écart-type. Validité de critère entre les mesures de méthode et la dissection du 3DUS a été testée par corrélation de Pearson, un fascicule de moyenne longueur et muscle le volume. Fiabilité intra-évaluateur de la méthode de 3DUS mesures de longueur et de volume fascicule dérivée a été quantifiée à l’aide un double sens mixte modèle intraclasse coefficient de corrélation (ICC3,3)41et après transformation logarithmique des données, la coefficient de variation (CV) a été calculée. La validité des mesures de volume longueur et muscle fascicules ont été confirmés par des corrélations significatives et élevées (r = 0.998, p < 0,01 et r = 0,985, p < 0,01, respectivement). Fiabilité intra-évaluateur de la méthode de 3DUS dérivés fascicule longueur des et volume était élevée (ICC3,3 0,983, CV CV de 7,3 % et ICC3,3 0,998, 5,4 %, respectivement). Il est conclu que l’approche de 3DUS présentée est un outil fiable et valide pour une évaluation longueur volume et fascicule de la VL et GM (tableau 1).

Tableau 1 : Données de Validation cadaver. C# est le nombre de cadavres, GM est m. gastrocnémien médial, VL est m. vastus lateralis. « Dissection » montre les résultats de la dissection de cadavre, et « 3DUS » présente les résultats de l’analyse des images 3DUS des cadavres.
Discussion
Nous présentons une technique 3DUS valide et fiable qui permet l’analyse rapide des variables morphométriques des muscles squelettiques. 3DUS différentes approches pour l’imagerie des tissus mous ont été disponibles pour environ une décennie42,43, mais les approches 3DUS ne sont toujours pas utilisés couramment. L’IRM est un « gold standard » pour l’estimation des volumes de muscle en vivo (e.g., référence16,17,18,19,,20). Validité de MRI a été testée et confirmée dans les études comparant les fantômes ou organes cadavériques de volume connu à volume IRM basée sur des estimations44,45. Cependant, MRI disponibles pour la recherche sont limitées et les analyses sont longues et coûteuses. En outre, sujet expérimental postures sont limités par l’alésage s’emparer des scanners MRI. Des images de résonance typiques génèrent contraste insuffisant pour effectuer des mesures des variables de la géométrie de muscle (Fascicule longueurs et angles). Cependant, la géométrie 3D musculaire peut être évaluée aussi à l’aide de MRI en utilisant des techniques supplémentaires, par exemple, DTI technique21. De même l’imagerie IRM, US est une distinction adéquate aux interfaces entre les différents types de tissus (c'est-à-dire visible en nous des images), fournissant une modalité valide pour tissus mous volume évaluation1,30 ,44,46,47,48,49. Contrairement à l’IRM, 3DUS images ont un contraste suffisant pour effectuer des analyses sur la géométrie de volume et des muscles de la même mesure.
En outre, la technique présentée permet combinant des images de balayages multiples en un seul, pour l’étude des gros muscles. Cette nouvelle méthode 3DUS fournit un outil potentiel pour l’évaluation clinique de la morphologie du muscle. Cette méthode peut être utilisée aussi pour l’imagerie des tissus mous des structures autres que les muscles (par exemple, tendons, organes internes, les artères).
Modifications pour améliorer les temps de traitement en mode hors connexion :
Modifications de l’approche 3DUS visaient principalement améliore le temps de traitement et de mesure des gros muscles. Le temps de traitement en mode hors connexion d’une image de 3DUS dépend de paramètres de tableau de voxel, fréquence d’échantillonnage, la taille du ROI, durée et vitesse de balayage et nombre de balayages, le poste de travail utilisé. Auparavant, un temps de reconstruction de ≈ 2 h était nécessaire pour reconstruire un seul balayage produisant 750 US images (30 s à 25 Hz)15,25,30. Avec la méthode actuelle de 3DUS, le même balayage prend seulement 50 s de temps de reconstruction (améliorer le temps de traitement « hors ligne » de 99 %). Cette amélioration peut s’expliquer par l’algorithme de remplissage améliorée qui utilise des opérations de grand vecteur pour remplir le voxels image par image, au lieu de pixel par pixel et amélioration de l’accès aléatoire de mémoire (RAM) de postes de travail pour construire des tableaux de voxel plus grandes. Avec la nouvelle approche de la 3DUS, une reconstruction typique représentant une longueur de balayage de 30 cm à une vitesse de 1 cm/s, avec une taille de voxel de cible de 0,2 x 0,2 x 0,2 mm3 et une fréquence de 25 Hz, prend le temps suivant pour reconstruire :
a. environ 10 s pour identifier les impulsions de synchronisation et sélectionner les images américaines pertinentes.
b. environ 120 s pour déterminer la matrice de transformation de l’étalonnage (PrTIm).
c. environ 10 s pour la phase de remplissage de bac.
d. environ 30 s pour exécuter les étapes de combler les lacunes.
Au total, prenant Note s. 170, étape b doit seulement être effectuées une seule fois, en supposant une connexion rigide des marqueurs MoCap pour la sonde, laissant 50 s pour la reconstruction d’un balayage unique. Combinant deux balayage unique reconstruite voxel tableaux prend environ 10 s.
Limitations et étapes cruciales :
Il y a plusieurs aspects d’imagerie 3DUS qui devraient être pris en compte :
i. qualité d’image US : une résolution spatiale supérieure des images 2D d’US fournir plus de pixels pour être placé dans le tableau de voxel. Cela permettrait de diminuer, les dimensions du voxel menant à densité plus élevée de voxel. Plusieurs appareils à ultrasons actuellement disponibles utilisent une combinaison spatiale pour réduire la texture granuleuse bruyante, permettant de mieux sans artefact de la distinction des interfaces des tissus. Une autre option pour réduire le chatoiement est accentuation des contours. Toutefois, il est à noter que cette approche n’est pas souhaitable, car il déforme l’image dans le but de créer des interfaces distinctes, faussant ainsi la véritable position anatomique des interfaces.
II. exactitude MoCap : Pixels ne peuvent être correctement placés dans un voxel, si le capteur de position quantifie précisément les coordonnées de la sonde. Avec une augmentation de la résolution de l’image, MoCap précision devient plus importante. Le 3DUS présenté configuration fonctionne mieux avec une dimension de voxel de 0,2 x 0,2 x 0,2 mm3, en utilisant un système MoCap avec une précision de 0,1 mm, fournissant une précision suffisante pour reconstruire le tableau de voxel de 3DUS.
III. l’échantillon de fréquence : la plus basse résolution temporelle de l’US images ou du flux de données MoCap détermine la fréquence d’échantillonnage. Cela influe sur le temps de balayage ou les paramètres de tableau de voxel. Par exemple, doubler la fréquence d’échantillonnage de 25 à 50 Hz permet un balayage à effectuer dans la moitié du temps. Sinon, ne pas changer la vitesse de balayage, fournit plus d’images pour remplir le tableau de voxel, laissant moins de lacunes à combler et ce qui peut augmenter la résolution de tableau de voxel. Toutefois, augmenter la résolution de tableau de voxel, sans pour autant augmenter la fréquence d’échantillonnage, nécessite un balayage plus lent, ce qui augmentera le potentiel des artefacts de mouvement.
IV. temps de la reconstruction de l’Image : rapides reconstitutions requièrent une puissante station de travail avec suffisamment de RAM disponible. En outre, temps de reconstruction varie largement selon le voxel tableau volume et la complexité de la procédure de combler les lacunes.
c. protocole expérimental : normalisation du protocole expérimental, comme exemplifié dans cette étude pour les VL et GM, est essentielle pour la comparaison de mesures morphologiques (p. ex., fascicule longueur, angle de fascicule, ventre musculaire longueur, longueur de tendon, longueur de l’aponévrose) entre les sujets et la surveillance dans les sujets des études longitudinales. Toutefois, Notez que la morphologie évaluée au repos peut modifier au cours de l’activation des muscles. Par exemple, pour l’expérience de VL, la morphologie d’extenseurs du genou au cours de la contraction maximale peut démontrer un angle élevé de pennation et plus courts fascicules en flexion du genou de 60°, par rapport à la morphologie au repos50. Dans certaines conditions (p. ex.., spasticité), électromyographie (EMG) peut être utilisé pour vérifier les niveaux d’activité musculaire au repos lors de l’interrogatoire.
VI. sonde de pression et tissus de déformation : si ample ultrasons gel est appliqué sur le retour sur investissement, le montant de la pression de rester pour le full contact entre la sonde et la peau est limité. Titre indicatif, nous conseillons que balayage un retour sur investissement devrait se sentir comme planant au-dessus de la peau, et la pression doit être appliquée uniquement pour garder en contact avec le gel et, par conséquent, la peau. Cependant, la déformation légère tissu peut-être inévitable, même avec une quantité généreuse de gel ultrasonique. Taille de la sonde et un retour sur investissement incurvé affectent la quantité requise de pression ou de gel utilisé. Plus grande taille de la sonde et un retour sur investissement plus incurvée exigent davantage de pression et/ou gel plus, que les sondes plus petites avec un semblable courbé ROI. Une autre solution possible est de se défaire de la région de réverbération (c'est-à-dire sans peau-contact) des images américaines. En outre, déformation des tissus est plus susceptible de se produire dans les premières couches de tissus, tels que la peau et les couches du tissu adipeux sous-cutané. Notez que les sujets avec peu ou pas du tissu adipeux sous-cutané sont donc plus sujettes aux effets indésirables de la pression. En outre, la déformation des tissus se produit probablement au centre de la sonde, ce qui n’est généralement pas la région de chevauchement avec d’autres coups de filet.
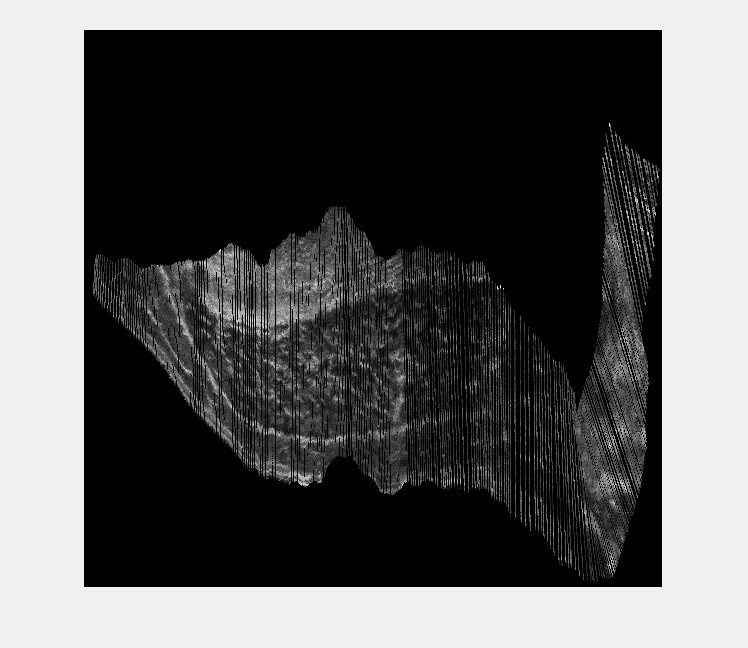
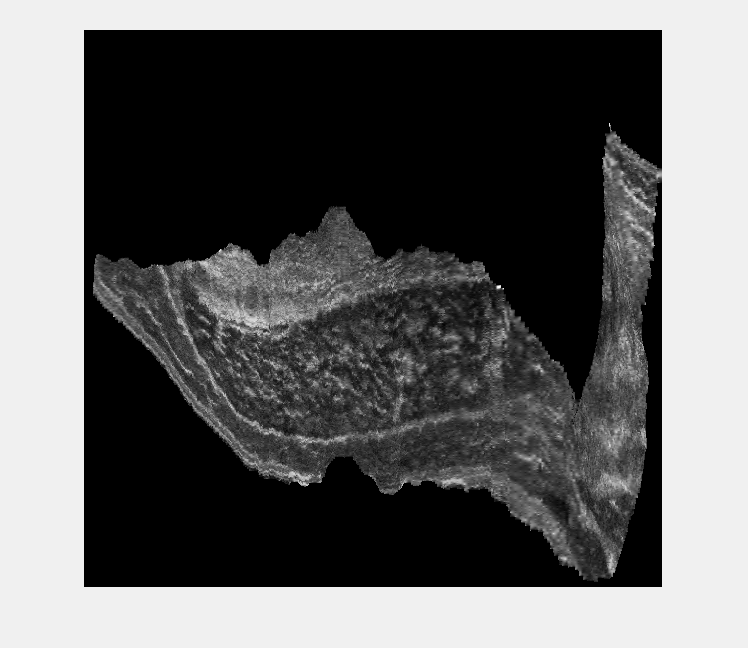
VII. des connaissances anatomiques et d’imagerie : une autre considération importante dans l’utilisation de n’importe quelle modalité d’imagerie, c’est que la connaissance de l’anatomie et de la modalité d’imagerie est essentielle pour obtenir une interprétation significative. Une variation anatomique entre sujets et objets de l’image doit être reconnu et pris en compte dans le processus d’identification des structures anatomiques. Même avec les muscles sains et/ou bien développées, une identification claire peut être difficile car il nécessite des connaissances anatomiques pour différencier entre les différentes composantes d’un muscle ou entre groupes de muscle51. Toutefois, dans le muscle atrophié (c.-à-d. personnes âgées, dans le cas de pathologie, ou un cadavre), l’identification claire est encore plus compliquée en raison d’une taille plus petite et diminue le contraste de l’image, et donc moins distinct tissu interfaces (Figure 4 ). Nous croyons que sans connaissances anatomiques préalables, nous aurait été limités à porter des jugements corrects dans la conception de cette approche 3DUS et dans l’exécution des mesures de 3DUS. Par exemple, pour des expériences de GM, angles différents semelle ne causent pas forcément des changements attendus dans le muscle complexe longueurs de tendon, en raison de la déformation dans le pied7. Aussi les détails anatomiques sur la courbure de l’aponévrose distal étaient essentiels pour une sélection adéquate de le mi-axe longitudinal dans les sujets38.

Figure 4 : Variation et la qualité des reconstruit des images anatomiques 3DUS transversale du muscle quadriceps à mi-chemin le long de la cuisse. (A) exemple d’un cadavre humain masculin montre une image d’un État atrophié au moment du décès (âge de la mort : 81 ans). Identification des limites des différents chefs du muscle quadriceps est difficile. (B) exemple d’un homme sédentaire (30 ans). (C) exemple d’un rameur de l’athlète masculin (30 ans). Les cases blanches pour échelle représentent 1 cm x 1 cm. s’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
Applications futures :
L’approche de 3DUS fournit un outil d’imagerie qui peut être utilisé à des fins diverses et des paramètres dans les sports et les cliniques. Dans les interventions cliniques efficacité est liée à la condition physique de niveau52. À l’aide de 3DUS pour le suivi des patients à risque de perte de muscle masse est important (p. ex., références,du5354,55) et potentiellement permet un ajustement du traitement. Une autre application potentielle de 3DUS se trouve dans le suivi de l’adaptation morphologique du muscle en réponse à l’intervention (formation) et/ou des blessures.
Ce protocole décrit une méthode de coût et temps efficace pour mesurer la structure des tissus mous du corps humain issu des balayages de 3DUS à la volée. En outre, évaluation des paramètres morphologiques significatifs de m. vastus lateralis et m. gastrocnémien médial s’est avérée valide et fiable.
Disclosures
Les auteurs n’ont rien à divulguer.
Acknowledgments
Les auteurs sont très reconnaissants à Adam Shortland et Nicola Fry qui ont partagé leurs algorithmes pour l’échographie en 3 dimensions en 2004, qui ont inspiré le développement du logiciel utilisé dans cette étude.
Materials
| Name | Company | Catalog Number | Comments |
| Ultrasound device (Technos MPX) | Esaote, Italy | NA | |
| Linear array probe (12.5 Mhz, 5 cm) | Esaote, Italy | NA | |
| Workstation (HP Z440) | HP, USA | http://www8.hp.com/us/en/workstations/z440.html | |
| Framegrabber (Canopus, ADVC 300) | Canopus, Japan | ADVC 300 | |
| Motion Capture System (Certus) | NDI, Canada | http://www.ndigital.com/msci/products/optotrak-certus/ | |
| Synchronisation device | VU, NL | Contact corresponding author | |
| Calibration frame | VU, NL | Contact corresponding author | |
| Thermometer | Greisinger, Germarny | GTH 175/PT | |
| Examination table | NA | NA | Any examination table |
| Inclinometer | Lafayette instrument, USA | ACU001 | |
| Adjustable Footplate | VU, NL | Contact corresponding author | |
| Torque wrench | VU, NL | Contact corresponding author | |
| Extendable rod | VU, NL | Contact corresponding author | |
| Goniometer (Gollehon) | Lafayette instrument, USA | 1135 | |
| Triangular shaped beam | NA | NA | Made out a piece of stiff foam |
| Lashing straps | NA | NA | Any lashing strap |
| Surgical skin marker | NA | NA | Any surgical skin marker |
| Ultrasound transmission gel | Servoson | NA | A sticky gel type is recommended |
References
- Reeves, N. D., Maganaris, C. N., Narici, M. V. Ultrasonographic assessment of human skeletal muscle size. Eur. J. Appl. Physiol. 91, 116-118 (2004).
- Van Den Engel-Hoek, L., Van Alfen, N., De Swart, B. J. M., De Groot, I. J. M., Pillen, S. Quantitative ultrasound of the tongue and submental muscles in children and young adults. Muscle Nerve. 46, 31-37 (2012).
- Seymour, J. M., et al. Ultrasound measurement of rectus femoris cross-sectional area and the relationship with quadriceps strength in COPD. Thorax. 64, 418-423 (2009).
- Seymour, J. M., et al. The prevalence of quadriceps weakness in COPD and the relationship with disease severity. Eur. Respir. J. 36, 81-88 (2010).
- Ho, S. S. Y. Current status of carotid ultrasound in atherosclerosis. Quant. Imaging Med. Surg. 6, 285-296 (2016).
- Barber, L., Barrett, R., Lichtwark, G. Passive muscle mechanical properties of the medial gastrocnemius in young adults with spastic cerebral palsy. J. Biomech. 44, 2496-2500 (2011).
- Huijing, P. A., Bénard, M. R., Harlaar, J., Jaspers, R. T., Becher, J. G. Movement within foot and ankle joint in children with spastic cerebral palsy: a 3-dimensional ultrasound analysis of medial gastrocnemius length with correction for effects of foot deformation. BMC Musculoskelet. Disord. 14, 365 (2013).
- Shortland, A. P., Harris, C. A., Gough, M., Robinson, R. O. Architecture of the medial gastrocnemius in children with spastic diplegia. Dev. Med. Child Neurol. 44, 158-163 (2002).
- Farup, J., et al. Muscle Morphological and Strength Adaptations to Endurance Vs. Resistance Training. J. Strength Cond. Res. 26, 398-407 (2012).
- Timmins, R. G., Shield, A. J., Williams, M. D., Lorenzen, C., Opar, D. A. Architectural adaptations of muscle to training and injury: a narrative review outlinig the contributions by fascicle lenght, pennation angle and muscle thickness. Br. J. Sports Med. 0, 1-7 (2016).
- Huijing, P. Important experimental factors for skeletal muscle modelling: non-linear changes of muscle length force characteristics as a function of degree of activity. Eur. J. Morphol. 34, 47-54 (1996).
- Van der Linden, B., Koopman, H., Grootenboer, H. J., Huijing, P. A. Modelling functional effects of muscle geometry. J. Electromyogr. Kinesiol. 8, 101-109 (1998).
- Woittiez, R. D., Huijing, P. A., Boom, H. B., Rozendal, R. H. A three-dimensional muscle model: a quantified relation between form and function of skeletal muscles. J. Morphol. 182, 95-113 (1984).
- Lieber, R. L., Blevins, F. T. Skeletal muscle architecture of the rabbit hindlimb: functional implications of muscle design. J. Morphol. 199, 93-101 (1989).
- Weide, G., et al. Medial gastrocnemius muscle growth during adolescence is mediated by increased fascicle diameter rather than by longitudinal fascicle growth. J. Anat. 226, 530-541 (2015).
- Fukunaga, T., et al. Physiological cross-sectional area of human leg muscles based on magnetic resonance imaging. J. Orthop. Res. 10, 926-934 (1992).
- LeBlanc, A., et al. Muscle volume, MRI relaxation times (T2), and body composition after spaceflight. J. Appl. Physiol. 89, (2000).
- Lindemann, U., et al. Association between Thigh Muscle Volume and Leg Muscle Power in Older Women. PLoS One. 11, 0157885 (2016).
- Gopalakrishnan, R., et al. Muscle Volume, Strength, Endurance, and Exercise Loads During 6-Month Missions in Space. Aviat. Space. Environ. Med. 81, 91-104 (2010).
- Wakahara, T., Ema, R., Miyamoto, N., Kawakami, Y. Inter- and intramuscular differences in training-induced hypertrophy of the quadriceps femoris: association with muscle activation during the first training session. Clin. Physiol. Funct. Imaging. , (2015).
- Pamuk, U., Karakuzu, A., Ozturk, C., Acar, B., Yucesoy, C. A. Combined magnetic resonance and diffusion tensor imaging analyses provide a powerful tool for in vivo assessment of deformation along human muscle fibers. J. Mech. Behav. Biomed. Mater. 63, 207-219 (2016).
- Prager, R. W., Rohling, R. N., Gee, A. H., Berman, L. Rapid calibration for 3-D freehand ultrasound. Ultrasound Med. Biol. 24, 855-869 (1998).
- Solberg, O. V., Lindseth, F., Torp, H., Blake, R. E., Nagelhus Hernes, T. A. Freehand 3D Ultrasound Reconstruction Algorithms-A Review. Ultrasound Med. Biol. 33, 991-1009 (2007).
- Gee, A., Prager, R., Treece, G., Berman, L. Engineering a freehand 3D ultrasound system. Pattern Recognition Letters. 24, (2003).
- Bénard, M. R., Harlaar, J., Becher, J. G., Huijing, P. A., Jaspers, R. T. Effects of growth on geometry of gastrocnemius muscle in children: a three-dimensional ultrasound analysis. J. Anat. 219, 388-402 (2011).
- Fry, N. R., Gough, M., Shortland, A. P. Three-dimensional realisation of muscle morphology and architecture using ultrasound. Gait Posture. 20, 177-182 (2004).
- Barber, L., Barrett, R., Lichtwark, G. Passive muscle mechanical properties of the medial gastrocnemius in young adults with spastic cerebral palsy. J. Biomech. 44, 2496-2500 (2011).
- MacGillivray, T. J., Ross, E., Simpson, H. A. H. R. W., Greig, C. A. 3D Freehand Ultrasound for in vivo Determination of Human Skeletal Muscle Volume. Ultrasound Med. Biol. 35, 928-935 (2009).
- Rana, M., Wakeling, J. M. In-vivo determination of 3D muscle architecture of human muscle using free hand ultrasound. J. Biomech. 44, 2129-2135 (2011).
- Haberfehlner, H., et al. Freehand three-dimensional ultrasound to assess semitendinosus muscle morphology. J. Anat. 229, 591-599 (2016).
- Bénard, M. R., Jaspers, R. T., Huijing, P. A., Becher, J. G., Harlaar, J. Reproducibility of hand-held ankle dynamometry to measure altered ankle moment-angle characteristics in children with spastic cerebral palsy. Clin Biomech. 25, 802-808 (2010).
- de Ruiter, C. J., Kooistra, R. D., Paalman, M. I., de Haan, A. Initial phase of maximal voluntary and electrically stimulated knee extension torque development at different knee angles. J. Appl. Physiol. 97, (2004).
- Kooistra, R. D., de Ruiter, C. J., de Haan, A. Knee angle-dependent oxygen consumption of human quadriceps muscles during maximal voluntary and electrically evoked contractions. Eur. J. Appl. Physiol. 102, 233-242 (2008).
- WinDV. , Available from: http://windv.mourek.cz/le (2017).
- VirtualDub. , Available from: http://virtualdub.org (2017).
- D'Errico, J. inpaint_nans. Matlab Central File Exchange. , Available from: www.mathworks.com/matlabcentral/fileexchange/4551 (2004).
- MITK. , Available from: http://mitk.org/wiki/MITK (2004).
- Bénard, M. R., Becher, J. G., Harlaar, J., Huijing, P. A., Jaspers, R. T. Anatomical information is needed in ultrasound imaging of muscle to avoid potentially substantial errors in measurement of muscle geometry. Muscle Nerve. 39, 652-665 (2009).
- Fix for Life Embalming. , Available from: www.fixforlifeembalming.com (2017).
- ImageJ. , Available from: https://fiji.sc (2017).
- Weir, J. P. Quantifying test-retest reliability using the intraclass correlation coefficient and the SEM. J. Strength Cond. Res. 19, 231-240 (2005).
- Prager, R. W., Gee, A., Berman, L. Stradx: real-time acquisition and visualization of freehand three-dimensional ultrasound. Med. Image Anal. 3, 129-140 (1999).
- Solberg, O. V., Lindseth, F., Torp, H., Blake, R. E., Nagelhus Hernes, T. A. Freehand 3D Ultrasound Reconstruction Algorithms-A Review. Ultrasound in Medicine and Biology. 33, 991-1009 (2007).
- Mitsiopoulos, N., et al. Cadaver validation of skeletal muscle measurement by magnetic resonance imaging and computerized tomography. J. Appl. Physiol. 85, (1998).
- Jackowski, C., et al. Noninvasive Estimation of Organ Weights by Postmortem Magnetic Resonance Imaging and Multislice Computed Tomography. Invest. Radiol. 41, 572-578 (2006).
- Weller, R., et al. The Determination of Muscle Volume with A Freehand 3D Ultrasonography System. Ultrasound Med. Biol. 33, 402-407 (2007).
- Barber, L., Barrett, R., Lichtwark, G. Validation of a freehand 3D ultrasound system for morphological measures of the medial gastrocnemius muscle. J. Biomech. 42, 1313-1319 (2009).
- Delcker, A., Walker, F., Caress, J., Hunt, C., Tegeler, C. In vitro measurement of muscle volume with 3-dimensional ultrasound. Eur J. Ultrasound. 9, (1999).
- Cenni, F., et al. The reliability and validity of a clinical 3D freehand ultrasound system. Comput. Methods Programs Biomed. 136, 179-187 (2016).
- de Brito Fontana, H., Herzog, W. Vastus lateralis maximum force-generating potential occurs at optimal fascicle length regardless of activation level. Eur. J. Appl. Physiol. 116, 1267-1277 (2016).
- Engstrom, C. M., Loeb, G. E., Reid, J. G., Forrest, W. J., Avruch, L. Morphometry of the human thigh muscles. A comparison between anatomical sections and computer tomographic and magnetic resonance images. J. Anat. 176, 139-156 (1991).
- Warburton, D. E. R., Nicol, C. W., Bredin, S. S. D. Health benefits of physical activity: the evidence. CMAJ. 174, 801-809 (2006).
- Moisey, L. L., et al. Skeletal muscle predicts ventilator-free days, ICU-free days, and mortality in elderly ICU patients. Crit. Care. 17, 206 (2013).
- Weijs, P. J., et al. Low skeletal muscle area is a risk factor for mortality in mechanically ventilated critically ill patients. Crit. Care. 18, 12 (2014).
- English, K. L., Paddon-Jones, D. Protecting muscle mass and function in older adults during bed rest. Curr. Opin. Clin. Nutr. Metab. Care. 13, 34-39 (2010).

{kind=link}
{kind=link}