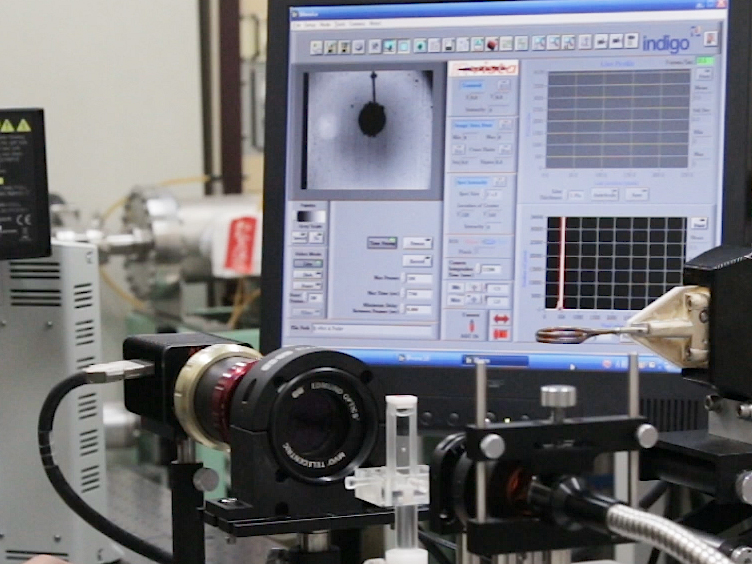
The coefficient of restitution is a parameter that describes the loss of kinetic energy during collision. Here, a free-fall setup under vacuum conditions is developed to be able to determine the coefficient of restitution parameter for particles in micrometer range with high impact velocities.