अधिकांश जानवरों के एक उच्च परिष्कृत और नियंत्रित तरीके से स्थानांतरित करने की क्षमता है। आनुवंशिक आधार अंतर्निहित हरकत नियंत्रण समझने के लिए यह मात्रात्मक अलग व्यवहार पैटर्न का आकलन करने के लिए अनिवार्य है। इस संबंध में, ड्रोसोफिला एक आदर्श मॉडल के रूप में सेवा कर सकते हैं। आज़ादी से उड़ान ड्रोसोफिला की ट्रैकिंग tantalizing 1-4 लेकिन तब होती है अपेक्षाकृत कम गति पर दो आयामों में ड्रोसोफिला लार्वा की रेंगने और इस तरह आसानी से नजर रखी जा सकती है। उचित रोशनी के साथ संयुक्त कैमरा आधारित setups के छवियों 5 प्राप्त करने के लिए उपयोग किया जाता है। घटना या प्रेषित प्रकाश दोनों व्यवहार प्रयोगों 6,7 में कार्यरत है। हालांकि, की वजह लार्वा और लार्वा आंदोलनों के रेंगने सतह वफादार रिकॉर्डिंग के संभावित प्रकाश प्रतिबिंब की अर्द्ध पारदर्शी शरीर के लिए चुनौतीपूर्ण हो सकता है। इस तरह की समस्याओं को दूर करने के लिए, कुछ जटिल तरीकों को तैयार किया गया है। हाल ही में, अंधेरे क्षेत्र रोशनी अग्रभूमि / पृष्ठभूमि शेष भाग को बढ़ाने के लिए शुरू की गई थीRAST 8। कैमरा आधारित रिकॉर्डिंग, लेंस-कम ऑप्टिकल इमेजिंग और के लिए एक विकल्प के रूप में छवि संवेदक-कम पर चिप अधिग्रहण तकनीक 9-11 पेश किया गया है।
कई ट्रैकिंग कार्यक्रम व्यावसायिक रूप से उपलब्ध सॉफ्टवेयर 12 और कस्टम समाधान सहित, हाल ही में शुरू किया गया है। उच्च throughput ट्रैकिंग कार्यक्रम के लिए उदाहरण मल्टी कृमि ट्रैकर (एमडब्ल्यूटी) कर रहे हैं 13 और Multianimal चाल और ट्रैक (MAGAT) 8। टकराने जानवरों कई नए पशु पहचान करने के लिए नेतृत्व इतना है कि दोनों आम में, कि कई जानवरों के लिए एक भी खुले मैदान क्षेत्र में लगाया जा सकता है। इस सीमा को पार करने के लिए, एक बहु अच्छी तरह से सेटअप व्यक्तिगत कुओं में 14 में 12 पशुओं को अलग पेश किया गया था। एकल व्यक्तियों की हरकत की सटीक मात्रा का ठहराव एक माइक्रोस्कोप 15 के साथ संयोजन में एक जंगम ट्रैकिंग मंच का उपयोग करके प्राप्त किया जा सकता है। हालांकि, इन सभी दृष्टिकोणों या तो लागत अक्षम हैं, कमी पर्याप्त पुनःसमाधान या उच्च throughput phenotyping के लिए काफ़ी समय भी।
हताश होकर कुल आंतरिक परावर्तन (FTIR) 16 (चित्रा 1) के आधार पर ऊपर उल्लेख किया सीमाओं को पार करने के लिए, हम विकसित किया है FIM (FTIR आधारित इमेजिंग विधि)। इस नई इमेजिंग दृष्टिकोण एक अभूतपूर्व उच्च विपरीत प्रदान करता है और यहां तक कि जानवरों 16 रेंगने की बहु रंग रिकॉर्डिंग की अनुमति देता है। इस काम के लिए और प्रभावी विधि के मूल सिद्धांत के लिए आसान है। एक एक्रिलिक गिलास प्लेट प्रकाश से भर जाता है (उदाहरण के लिए, 875 अवरक्त एनएम)। कारण एक्रिलिक शीशे और हवा के विभिन्न अपवर्तक सूचकांक करने के लिए, प्रकाश पूरी तरह से ग्लास / हवा सीमा पर परिलक्षित होता है। एक्रिलिक कांच का कोई हीटिंग 16 उल्लेख किया है। एक उच्च अपवर्तक सूचकांक के साथ वस्तुओं प्रकाश में बाढ़ आ गई तालिका स्पर्श, तभी इन वस्तुओं में प्रवेश प्रकाश कर सकते हैं। जानवरों की सतह को छूने, तो प्रकाश परिलक्षित होता है और (चित्रा 1) के नीचे से कब्जा कर लिया जा सकता है। परिणाम में, केवल संपर्कपशुओं के क्षेत्र में एक समग्र काले रंग की पृष्ठभूमि के साथ विस्तृत इमेजिंग की अनुमति देता है जो एक उज्ज्वल हाजिर, के रूप में प्रकट होता है। इस प्रकार, FIM-इमेजिंग कंप्यूटर दृष्टि एल्गोरिदम के लिए एकदम सही फिल्में रिकॉर्ड करने के लिए अनुमति देता है। FIM की सरल और मजबूत उपयोग अब तक पहुँचने में जटिल पशुओं के व्यवहार की विस्तृत उच्च throughput विश्लेषण लाता है और प्रसंस्करण जानकारी का अध्ययन करने के लिए इस्तेमाल किया जा सकता है: उदाहरण के लिए, महक 8, 16; दृष्टि 17 या thermosensation 18।
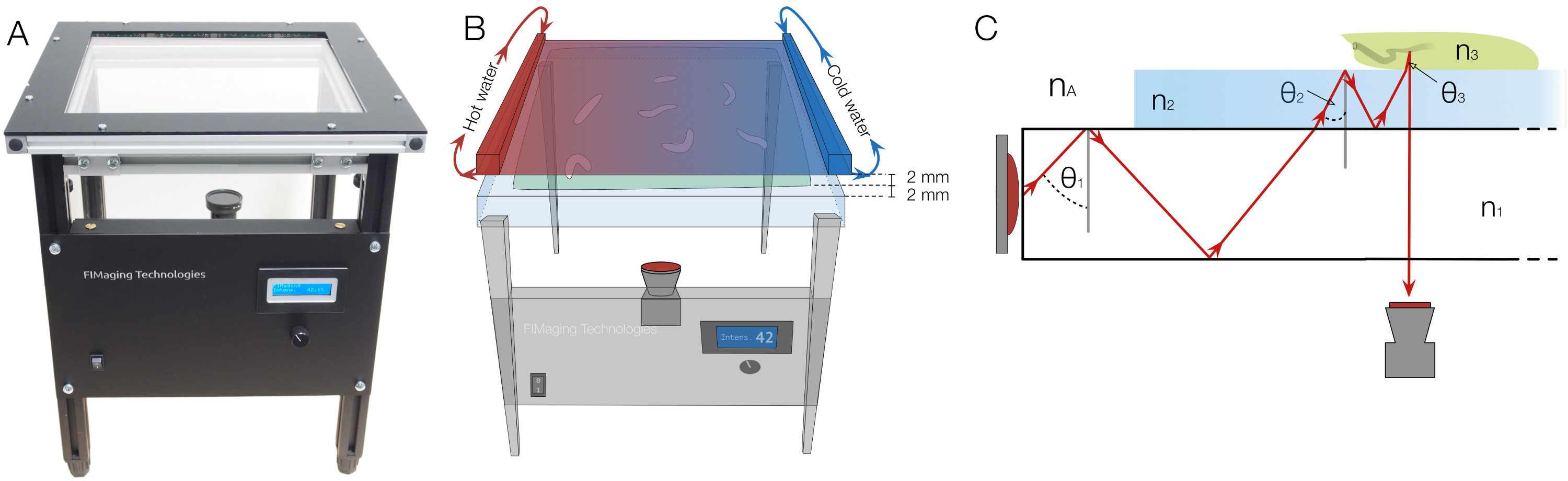
गर्मी प्रोत्साहन एकीकरण और अंतर्निहित भौतिक सिद्धांतों के साथ 1. FIM सेटअप चित्रा। (ए) FIM सेटअप। रोशनी की तीव्रता सामने पैनल पर विनियमित किया जा सकता है। (बी) के एक गर्मी प्रोत्साहन देने के लिए, एक काले, एल्यूमिनियम प्लेट चित्रित दोनों पक्षों में गर्म और ठंडे पानी के साथ perfused, अगर सतह से ऊपर 2 मिमी रखा गया है जोखुद को 2 मिमी मोटी है। ढाल तापमान अंतर से गर्मी रेडिएटर प्लेट और अगर पर स्थापित है (सी) निराश कुल आंतरिक प्रतिबिंब के भौतिक सिद्धांत:। एक एक्रिलिक कांच की थाली अवरक्त प्रकाश से प्रकाशित किया जाता है। θ 1, θ 2, और θ 3 प्रकाश प्रतिबिंब कोण से संकेत मिलता है। एन ए, 1, 2 n और एन 3 एन क्रमशः वायु, एक्रिलिक गिलास, अगर और लार्वा की अपवर्तक सूचकांक निरूपित और असमानता n एक <एन 1 <2 n <एन 3 को पूरा करना। कारण अपवर्तन, प्रतिबिंब कोण संक्रमण के दौरान बदलता है। कोण महत्वपूर्ण कोण से नीचे है, प्रकाश है अब और प्रतिबिंबित नहीं होता है, परतों के माध्यम से पारित कर सकते हैं और नीचे से कब्जा कर लिया जा सकता है। यह आंकड़ा का एक बड़ा संस्करण देखने के लिए यहां क्लिक करें।
सपाFIM ने विश्लेषण किया जा सकता है कि प्रक्रियाओं के ectrum व्यापक है। किसी भी आगे समायोजन के बिना, FIM इमेजिंग ड्रोसोफिला (चित्रा 5 ब) के सभी लार्वा चरणों की निगरानी के लिए इस्तेमाल किया जा सकता है या ड्रोसोफिला 19 वयस्क के पैर के निशान का पालन करने के लिए इस्तेमाल किया जा सकता है। सी के इसी तरह, trajectories एलिगेंस या planarian flatworms की आवाजाही आसानी से (चित्रा 5C) दर्ज किया जा सकता है। फंगल hypha या रूट बाल विकास की भी विश्लेषण संभव 19 प्रकट होता है। हमारे वर्तमान FIM सेटअप में, 4 एक्स 16 अवरक्त प्रकाश उत्सर्जक डायोड (IR- एल ई डी) (चित्रा 1) ट्रैकिंग तालिका कहा जाता है, एक 32 X 32 सेमी 2 एक्रिलिक कांच की थाली में एकीकृत कर रहे हैं। आईआर-एल ई डी की तीव्रता आसानी से पल्स चौड़ाई मॉडुलन (PWM) के माध्यम से सर्किट से जुड़ा एक माइक्रो नियंत्रक द्वारा किया जा सकता है, जो ट्रैकिंग मेज पर वस्तुओं के वजन के आधार पर निकाला जाता है। FIM रोशनी की तीव्रता का एक व्यापक रेंज पर बहुत उच्च विपरीत छवियों पैदावार। महत्वपूर्ण बात है, यह जनरलपहले से ही कम समग्र अवरक्त irridation में उत्कृष्ट परिणाम erates।
एक अवरक्त फिल्टर के साथ एक कैमरा सेटअप में अतिरिक्त उत्तेजनाओं के एकीकरण की अनुमति देता है जो ट्रैकिंग मेज, नीचे रखा गया है। हीट उत्तेजनाओं को आसानी से एक गर्मी रेडिएटर थाली से लागू किया जा सकता है और प्रकाश उत्तेजनाओं एक एलसीडी प्रोजेक्टर से लागू कर रहे हैं। इसके अलावा odorants सरल पलकों 8 से ढ़ाल में समाहित किया जा सकता है। गर्मी ढाल प्रयोगों के लिए, गर्मी रेडिएटर थाली क्रमशः दोनों पक्षों पर गर्म और ठंडे पानी के साथ perfused है और लार्वा (चित्रा 1 बी) के ऊपर 2 मिमी रखा।
उच्च विपरीत, उच्च गुणवत्ता फिल्मों की पीढ़ी परिष्कृत कंप्यूटर आधारित छवि विश्लेषण के लिए संभावना को खोलता है, इस प्रकार हम छवियों से सुविधाओं का एक बड़ा सेट निकालने के लिए (चित्रा 2) FIMTrack सॉफ्टवेयर लागू किया है। पहले छह प्राथमिक सुविधाओं जानवर (चित्रा 3 ए) के समोच्च से परिभाषित किया गया। इन सुविधाओं के आधार रेखा प्रदानएक निश्चित समय बिंदु (3B चित्रा) में जानवरों के आकार और कुछ उत्तेजनाओं में अपनी स्थिति का वर्णन है, जो छह माध्यमिक सुविधाओं के आगे गणना के लिए। वर्तमान में, नौ तृतीयक सुविधाओं लौकिक पहलुओं को एकीकृत करने और इस प्रकार प्राथमिक और माध्यमिक सुविधाओं (चित्रा -3 सी) के साथ जानवर की हरकत को चिह्नित कर रहे हैं कि गणना कर रहे हैं।
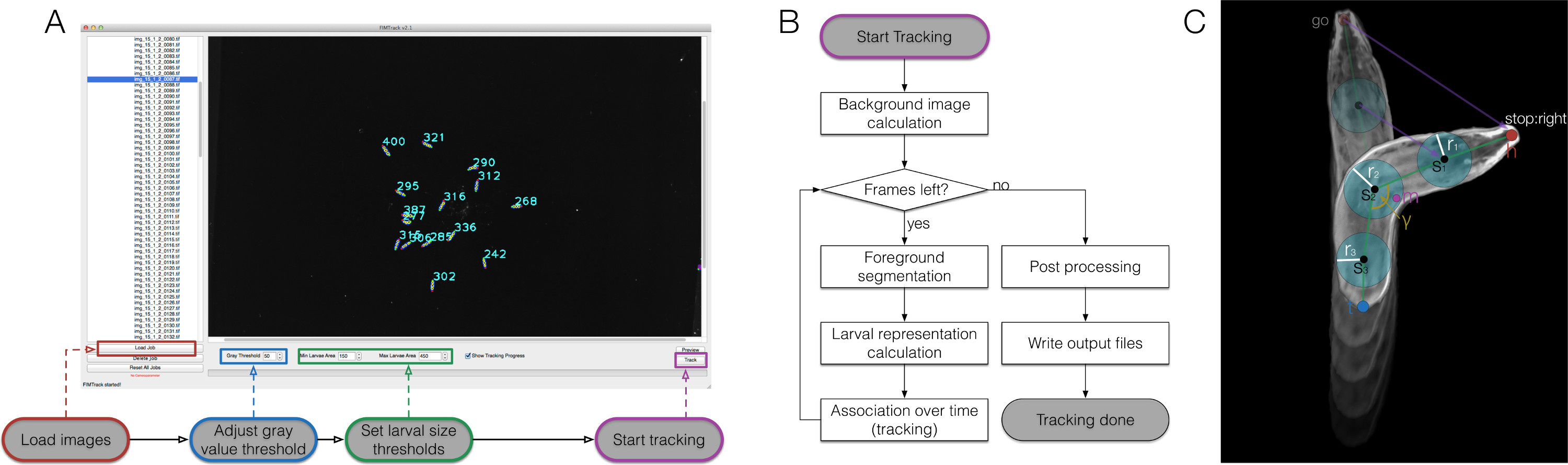
चित्रा 2. FIMTrack सिंहावलोकन, एल्गोरिथम कार्यप्रवाह और लार्वा प्रतिनिधित्व। (ए) कैसे FIMTrack उपयोग करने के लिए। छवियों लोड कर रहे हैं। ग्रे मूल्य सीमा और एकल लार्वा को परिभाषित लार्वा आकार सीमा को सेट किया जाना चाहिए। लार्वा क्षेत्र [मिनट आकार, अधिकतम आकार] में होना चाहिए। ट्रैकिंग हाइलाइट बटन द्वारा शुरू किया गया है। (बी) ट्रैकिंग कार्यप्रवाह। प्रारंभ बटन क्लिक किया जाता है के बाद, पृष्ठभूमि छवि सीए हैlculated (समय के साथ कम से कम तीव्रता)। के रूप में लंबे समय के लिए छोड़ दिया फ्रेम के रूप में वहाँ, लार्वा ग्रे सीमा और मंत्री और अधिकतम आकार दहलीज पर आधारित खंडित कर रहे हैं। लार्वा अभ्यावेदन गणना कर रहे हैं सभी segmentations के लिए ((सी) के लिए तुलना)। प्रत्येक नया मॉडल एक वैध ट्रैक उपलब्ध है अगर एक दिया प्रक्षेपवक्र करने के लिए जुड़ा हुआ है। अंतिम सीमा तक पहुँच जाता है, को अंतिम रूप देने पोस्ट प्रोसेसिंग उत्पादन पीढ़ी द्वारा पीछा किया जाता है। (सी) लारवल प्रतिनिधित्व। जानवर एक सिर और एक पूंछ बिंदु (एच और टी) के होते हैं। इन बिंदुओं के बीच रीढ़ अंक के एक मनमाने ढंग से विषम संख्या मैं एक त्रिज्या R मैं के साथ सेट किया जा सकता है। इसके अलावा, जन मी और कोण γ झुकने मुख्य शरीर के केंद्र गणना कर रहे हैं। कई प्रस्ताव संबंधी मापदंडों बैंगनी लाइनों द्वारा sketched रहे हैं। यह आंकड़ा का एक बड़ा संस्करण देखने के लिए यहां क्लिक करें।

FIMTrack द्वारा गणना 3. सुविधाएँ चित्रा। जानवरों के समोच्च के आधार पर (ए) प्राथमिक सुविधाओं। (बी) माध्यमिक सुविधाओं, प्राथमिक सुविधाओं पर आधारित है। (सी) तृतीयक सुविधाओं, लगातार फ्रेम और अतिरिक्त आदानों में प्राथमिक सुविधाओं के आधार पर इस बात का एक बड़ा संस्करण देखने के लिए यहां क्लिक करें आंकड़ा।
