



Overview
출처: 슈레야스 나르시푸르, 기계 및 항공 우주 공학, 노스 캐롤라이나 주립 대학, 롤리, NC
프로펠러는 그림 1에 표시된 것처럼, 방사형 역을 따라 위치에 대해 코드의 각도가 변경되는 트위스트 익포일입니다. 프로펠러는 항공기 및 선박 추진 시스템에 널리 사용되어 고성능 차량을 설계하기 위해 프로펠러의 상세한 특성을 필요로합니다.
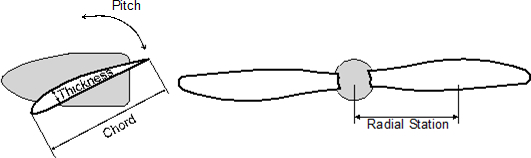
그림 1. 방사형 역에서 화음, 두께 및 피치.
프로펠러의 특징 중 하나는 피치/트위스트입니다. 프로펠러의 피치는 일반적으로 길이 단위로 주어지며 프로펠러가 하나의 단일 회전에서 공기를 통해 이동하는 이론적 거리입니다. 그러나 항공기와 프로펠러의 항력으로 인해 프로펠러는 이론적인 거리를 이동하지 않습니다. 실제 이동 거리는 프로펠러의 효과적인 피치라고 하며, 이론적 또는 기하학적 피치와 유효 피치의 차이는 도 2에 도시된 바와 같이 프로펠러 슬립이라고 합니다.
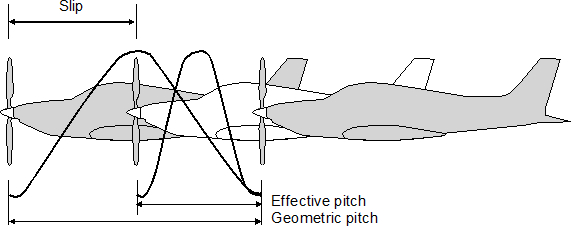
그림 2. 피치와 슬립의 표현.
이 데모에서는 7개의 프로펠러가 아음속 풍동에서 프로펠러 테스트 장비를 사용하는 것이 특징입니다. 그 다음에는 피치, 직경 및 프로펠러 성능에 대한 블레이드 수의 변동 효과를 분석하기 위한 상세한 파라메트릭 연구가 뒤따릅니다.
Principles
고정 피치와 가변 피치의 두 가지 주요 프로펠러 유형이 있습니다. 고정 피치 프로펠러는 하나의 최적의 작동 조건을 위해 설계되었으며 효율적입니다. 그들은 주어진 된 공기 속도 및 RPM에 대 한 전력 입력 비율에 높은 전력 출력, 대부분의 경우 항공기 크루즈 조건. 그러나 이착륙 중에는 RPM과 비행 속도가 낮을 때 고정 피치 프로펠러가 매우 비효율적입니다. 가변 피치 프로펠러 블레이드는 파일럿이 프로펠러 피치를 변경하여 모든 작동 조건에 대한 프로펠러 효율을 극대화할 수 있도록 하여 고정 피치 문제에 대한 솔루션을 제공합니다. 이러한 이유로 연료 효율이 지배적인 요소인 대형 프로펠러 항공기에서 가변 피치 프로펠러가 효율성을 극대화하는 데 사용됩니다.
고급 비율, 추력 계수, 토크 계수, 전력 계수 및 프로펠러 효율은 프로펠러를 특성화하는 데 필요한 중요한 비차원 파라미터입니다. 이러한 매개 변수에 기초하여 프로펠러, 에어 브레이크 및 프로펠러의 다른 작동 체제인 풍차 정권을 식별할 수 있습니다. 프로펠러 정권에서 프로펠러는 양성 추력과 토크를 생성합니다. 공중 브레이크 정권은 토크가 긍정적으로 유지되는 동안 추력이 음수될 때 시작됩니다. 이 정권에서 프로펠러는 시스템을 느리게 합니다. 마지막으로 추력과 토크가 모두 영하로 떨어지면 프로펠러는 풍차 정권에 있습니다. 여기서, 기류는 프로펠러를 구동하는 모터/엔진이 극복할 수 없는 프로펠러에 힘을 생성할 때 프로펠러를 제어합니다. 프로펠러 효율은 프로펠러 영역 을 넘어서는 의미가 없습니다.
주어진 공기 속도 및 RPM에 대한 고효율 프로펠러 체제에서 프로펠러를 작동하는 것이 항상 바람직하다. 앞서 언급했듯이 고정 피치 프로펠러는 일반적으로 크루즈 비행 중 가장 높은 효율로 작동하도록 설계되었으며, 이륙 및 착륙 시와 같이 낮은 속도로 작동할 수 있지만 효율성은 매우 낮습니다. 가변 피치 프로펠러는 비행 정권(이륙, 크루즈 또는 착륙)에 따라 프로펠러 정권에서 가능한 가장 높은 효율성을 얻기 위해 조정하여 항공기의 연료 효율을 극대화할 수 있습니다.
프로펠러 피치 외에도 프로펠러 블레이드의 수는 프로펠러에서 사용할 수 있는 추력을 설정하는 데 중요한 역할을 합니다. 일반적으로 프로펠러의 직경 또는 피치에 설계 제약 조건이 있는 경우 블레이드 수를 늘리면 생성된 추력의 양이 증가할 수 있습니다. 그러나, 여분의 추력은 프로펠러 효율의 비용으로 올 수 있습니다, 상세한 분석의 필요성을 필요로.
프로펠러 회전속도(n)및직경(D)에대한 프리스트림 속도(V∞)를정상화하는 매개변수인 고급 비율, J는다음과 같은 방정식에 의해 주어진다.

프리스트림 흐름 속도는 방정식을 사용하여 측정할 수 있습니다.

여기서 프리스트림 밀도입니다.
추력 계수, CT는프로펠러 추력, T의비차원 척도이며 방정식에 의해 제공됩니다.

마찬가지로, 토크, CQ및 전력, CP,계수, 프로펠러 토크 및 출력 전력의 비차원 측정은 각각 방정식에 의해 제공됩니다.


θ가 토크이고 P는 프로펠러를 실행하기 위해 브러시리스 DC 모터에 공급되는 전력입니다. 전력, P, 전압, V및 전류의 제품으로 계산할 수 있습니다.

마지막으로 프로펠러 효율은 다음과 같이 표현할 수 있습니다.

Subscription Required. Please recommend JoVE to your librarian.
Procedure
1. 아음속 풍관에서 프로펠러 특성 측정
- 도 3에 도시된 바와 같이 4축 스팅 마운트를 사용하여 아음속 풍동에 프로펠러 테스트 리그를 설정합니다. 이 데모에서는 2.6ft x 3.7피트 테스트 섹션과 최대 동적 압력 설정이 있는 풍동이 사용되었습니다.

그림 3. 프로펠러 장비. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
- 6축 로드 셀을 리그에 연결합니다. 이것은 추력과 토크를 측정하는 데 사용됩니다.
- 브러시리스 DC 모터를 장비에 고정한 다음 첫 번째 프로펠러를 부착합니다.
- DC 모터를 전자 속도 컨트롤러와 펄스 폭 변조 신호 발생기와 연결하여 모터의 속도를 제어합니다.
- 모터에 공급되는 전류 및 전압을 측정하고 리튬 폴리머 배터리에 연결하는 전력 분석기를 연결합니다.
- 스피릿 레벨을 사용하여 스팅 프로펠러 설정이 0 피치 및 0 yaw와 흐름 방향으로 정렬되도록 합니다.
- 풍동 도어를 고정하고 주 전원을 켭다.
- 윈드 터널을 켜고 신호 발생기및 로드 셀 데이터 수집 시스템을 켭니다.
- 가상 계측기 소프트웨어를 사용하여 로드 셀의 힘을 0으로 설정합니다.
- 신호 발생기를 설정하여 모터를 10% 스로틀로 실행합니다.
- 풍동이 꺼져 서 도면을 기록하기 시작합니다. 다음 데이터를 기록합니다.
a. 프로펠러 특성 - 블레이드 수, 프로펠러 직경(in), 프로펠러 피치(in).
b. 신호 발생기 구성에 따라 속도(백분율 스로틀).
c. 풍동 트랜스듀서의 동적 압력(psf).
d. 전력 분석기에서 BLDC 모터에 공급되는 전압(V) 및 전류(A).
e. 로드 셀에서 추력(lb) 및 토크(in-lb).
f. 프로펠러 RPM (분당 회전). RPM 판독값은 실험이 끝날 때만 추출할 수 있습니다. - 풍동을 켜고 0.5 psf의 단계에서 0 psf에서 10 psf로 동적 압력을 다릅니다.
- 각 설정에서 풍동이 안정화되도록 한 다음 위에 나열된 것과 동일한 데이터를 기록합니다.
- 추력과 토크가 음수되는 동적 압력 설정까지 0.5 psf의 증분에서 동적 압력 설정을 계속 증가시다. 각 증분에 모든 데이터를 기록합니다.
- 터널 동적 압력을 다시 0으로 재설정하고 풍동을 끕니다.
- 모터 속도를 50%로 설정하고 1.11 - 1.15단계를 반복합니다.
- 모터 속도를 100% 스로틀로 설정하고 1.11 - 1.15 단계를 반복합니다.
- 모든 프로펠러에 대해 위의 절차를 반복하여 추력과 토크가 음수가 되는 동적 압력까지 10%, 50% 및 100%의 속도를 테스트합니다.
- 모든 테스트가 완료되면 전자 속도 컨트롤러를 프로그래밍 키트에 연결하여 프로펠러 RPM 데이터를 모두 기록합니다.
- 모든 시스템을 종료합니다.
표 1. 프로펠러 테스트.
| 프로펠러 직경 x 피치(in) | 블레이드의 # | 재료 |
| 18 x 8 | 2 | APC |
| 16 x 8 | 2 | APC |
| 15 x 8 | 2 | APC |
| 15 x 10 | 2 | APC |
| 15 x 12 | 2 | APC |
| 18 x 8 | 2 | 나무 |
| 18 x 8 | 4 | 나무 |
이 연구에 사용되는 고정 피치 프로펠러는 직경과 피치인치에 의해 정의됩니다. 예를 들어, 18 x 8 프로펠러는 8in의 기하학적 피치가 있는 직경 프로펠러 18개입니다.
프로펠러는 추진 및 추력 생성을 위해 다양한 유형의 항공기에 널리 사용되므로 신중하게 설계하고 특성화해야합니다. 프로펠러는 본질적으로 코드의 각도가 복사로 변경되는 트위스트 익포일입니다. 프로펠러의 특징 중 하나는 피치, 또는 트위스트입니다.
프로펠러의 피치는 일반적으로 길이 단위로 주어지며 프로펠러가 하나의 단일 회전에서 공기를 통해 이동하는 이론적 거리입니다. 그러나 항공기와 프로펠러의 항력으로 인해 프로펠러는 이론적인 거리를 이동하지 않습니다. 실제 이동 거리는 프로펠러의 유효 피치라고합니다. 이론적 피치와 유효 피치의 차이는 프로펠러의 슬립이라고합니다.
프로펠러를 설명할 때, 우리는 또한 각각의 치수 계수를 특징으로 하는 추력, 토크 및 힘에 대해 이야기합니다. 여기서, T는 추력, 타우는 토크, P는 모터에 전원 공급장치, 로는 프리스트림 밀도, n은 프로펠러의 회전 속도, 및 D는 프로펠러 직경이다. 중요한 것은 프로펠러의 효율성도 정의합니다. 이는 프로펠러 회전 및 직경에 대한 프리스트림 속도를 정규화하는 고급 비율 J와 함께 토크 및 추력 계수를 사용하여 계산됩니다. 이러한 치수 값을 사용하여 프로펠러가 다양한 조건에서 작동하는 방식을 결정할 수 있습니다.
프로펠러 정권에서 프로펠러는 양성 추력과 토크를 생성합니다. 공중 브레이크 정권은 추력이 음수로 진행될 때 시작되며 토크는 여전히 양수로 유지됩니다. 이 정권에서 프로펠러는 긍정적인 전진 움직임을 제공하는 대신 시스템을 느리게 합니다. 추력과 토크가 모두 영하로 떨어지면 프로펠러는 풍차 정권에 있습니다. 여기서, 기류는 프로펠러를 구동하는 모터가 극복할 수 없는 프로펠러에 힘을 생성하기 때문에 프로펠러를 제어합니다.
프로펠러 정권 을 넘어 프로펠러 효율의 계산은 의미가 없다는 점에 유의하는 것이 중요합니다. 주어진 공기 속도와 RPM에 대한 고효율 프로펠러 체제에서 프로펠러를 작동하는 것이 항상 바람직하다. 고정 피치 프로펠러의 경우 고정 피치 프로펠러가 최적의 작동 조건을 위해 설계되었으며 일반적으로 크루즈 조건에서 가장 효율적이며 이륙 및 착륙이 비효율적이기 때문에 어려울 수 있습니다.
특히 프로펠러의 직경이나 피치에 제약이 없는 경우 작동을 개선하는 한 가지 방법은 블레이드 수를 늘리는 것입니다. 이렇게 하면 추력의 양이 증가할 수 있습니다. 그러나 프로펠러 효율이 낮아집니다. 이 실험에서는 여러 가지 프로펠러를 특성화하고 피치, 직경 및 블레이드 수의 성능에 미치는 영향을 결정합니다.
이 실험에서는 직경, 피치 및 블레이드 수가 다양한 5개의 APC와 2개의 목재 프로펠러를 사용하여 아음속 풍관에서 프로펠러 특성을 검사합니다.
먼저 4축 스팅 마운트를 사용하여 풍동 내부에 프로펠러 테스트 리그를 설치하여 프로펠러 테스트 리그 부품을 보관합니다. 6축 로드 셀은 추력과 토크를 측정하는 데 사용됩니다. 로드 셀을 리그에 부착하고 프로펠러에 전력을 공급하는 브러시리스 DC 모터를 고정한 다음 첫 번째 프로펠러를 부착합니다.
이제 브러시리스 DC 모터를 전자 속도 컨트롤러와 펄스 폭 변조 신호 발생기와 연결하여 모터의 속도를 제어합니다. 또한 모터를 전력 분석기에 연결하여 제공된 전압 및 전류를 측정합니다. 그런 다음 브러시리스 DC 모터를 리튬 폴리머 배터리에 연결합니다.
설정이 완전히 조립되면 정신 레벨을 사용하여 스팅 프로펠러 설정이 피치 나 yaw없이 공기 흐름 방향으로 정렬되도록하십시오. 그런 다음 풍동 문을 고정하고 주 전원을 켜고 풍동을 켭니다. 그런 다음 신호 발생기 및 로드 셀 데이터 수집 시스템을 켭분입니다.
테스트를 시작하기 전에 프로펠러 블레이드 수, 직경 및 피치를 포함하여 스프레드시트에 프로펠러 특성을 기록합니다. 이제 풍구 컴퓨터의 데이터 수집 소프트웨어를 사용하여 로드 셀의 힘을 0으로 설정합니다. 그런 다음 신호 발생기를 설정하여 모터를 10% 스로틀로 실행합니다.
윈드 터널이 꺼져 있는 0 판독값을 기록하여 시작합니다. 스로틀 의 백분율과 풍동 트랜스듀서의 동적 압력 측면에서 속도를 기록합니다. 또한, 전력 분석기로부터 모터에 공급되는 전압 및 전류를 기록하고, 로드 셀에 의해 측정된 추력 및 토크를 기록한다.
이제 풍동을 켜고 동적 압력을 0.5 psf로 늘립니다. 풍전도가 안정화될 수 있는 시간을 허용한 다음 모든 데이터를 기록합니다. 추력과 토크가 음수되는 동적 압력 설정까지 0.5 psf의 증분에서 동적 압력 설정을 계속 증가시면 됩니다.
각 증분에 모든 데이터를 기록합니다. 추력과 토크에 대한 측정값이 음수되면 동적 압력을 다시 0으로 설정하고 풍동을 끕니다. 그런 다음 신호 발생기를 사용하여 모터 속도를 50%로 증가시킵니다. 0측정을 수행하여 풍터널을 끄고 모든 데이터를 기록합니다. 그런 다음 풍동을 켜고 동적 압력 판독값을 0.5 psf로 설정합니다. 그런 다음 모든 데이터를 기록합니다.
0의 증분에서 이전과 같이 측정을 반복합니다. 5 psf 토크와 추력이 음수될 때 동적 압력 판독까지. 그런 다음 동적 압력을 다시 0으로 설정하고 풍동을 끄고 프로펠러 속도를 100% 스로틀로 늘립니다. 풍동을 끄고 제로 측정값을 기록한 다음, 토크와 추력이 음수되는 동적 압력까지 테스트를 다시 반복합니다.
모든 프로펠러에 대한 이러한 테스트를 반복하여 각 프로펠러에 대해 10%, 50%, 스로틀을 테스트하여 추력과 토크가 음수가 되는 동적 압력까지 테스트합니다. 모든 테스트가 완료되면 전자 속도 컨트롤러를 프로그래밍 키트에 연결하고 프로펠러 RPM 데이터를 모두 기록합니다. 그런 다음 모든 시스템을 종료합니다.
실험 결과를 평가하기 위해 먼저 프로펠러 추력, 회전 속도, 직경 및 프리스트림 밀도를 사용하여 추력 계수, CT를 계산합니다. 우리는 또한 토크와 전력 계수, CQ 및 CP를 각각 계산할 수 있습니다. 타우는 프로펠러 토크이고 P는 DC 모터에 공급되는 전력이며 전압 및 전류의 제품으로 계산된다는 것을 기억하십시오.
마지막으로, 우리는 회전과 직경의 프로펠러 속도에 프리 스트림 속도를 정상화하기 위해, 고급 비율 J를 계산할 수 있습니다. 회전 속도는 실험 중에 기록된 분당 회전률로, 60으로 나뉩니다. 프리스트림 속도는 풍동에서 제어하는 동적 압력을 사용하여 계산됩니다. 이어서 프로펠러 효율을 계산할 수 있다.
이제 프로펠러 중 하나에 대해 세 계수와 고급 비율 J에 비해 효율성을 플롯해 봅시다. 여기서는 직경 18인치, 8인치 피치 프로펠러에 대한 데이터를 표시합니다. 프로펠러는 0.6의 고급 비율로 양수 추력을 생성하고 에어 브레이크 영역으로 전환합니다. 공중 브레이크 영역은 추력이 음수로 진행될 때 시작되며 토크는 긍정적입니다. 이 영역에서 프로펠러는 시스템을 느리게 합니다.
0.85의 고급 비율 후, 프로펠러는 음의 토크를 생성하고 풍차처럼 행동한다. 여기서, 기류는 프로펠러를 구동하는 모터가 극복할 수 없는 프로펠러에 힘을 생성합니다. 프로펠러 효율이 J에서 가장 높으며 0.4와 같으며 프로펠러 영역을 넘어서는 의미가 없습니다.
이제 블레이드와 프로펠러 피치의 수를 일정하게 유지하면서 다양한 프로펠러 직경을 살펴보겠습니다. 직경의 변화는 효율성에 미미한 영향을 미친다는 것을 알 수 있습니다. 그러나 프로펠러 직경이 감소하면서 세 계수는 약간 증가합니다.
다음으로, 일정한 프로펠러 직경과 블레이드 수를 유지하면서 다양한 프로펠러 피치의 효과를 비교합니다. 일반적으로 고음 프로펠러는 저피치 프로펠러에 비해 주어진 고급 비율에 대해 더 많은 추력, 토크 및 전력을 생성합니다. 프로펠러 피치가 증가하여 프로펠러 영역의 범위도 증가합니다. 프로펠러 피치가 증가함에 따라 최대 작동 효율이 더 높은 고급 비율로 발생하는 것을 알 수 있습니다.
마지막으로, 일정한 프로펠러 직경과 피치를 유지하면서 블레이드 수의 효과를 비교합니다. 블레이드 수를 두 배로 늘리면 추력과 토크가 훨씬 더 높다는 것을 알 수 있습니다. 프로펠러 영역의 범위는 비슷하지만, 4블레이드 프로펠러는 2블레이드 프로펠러에 비해 더 높은 고급 비율로 풍차처럼 행동하기 시작합니다. 또한 2블레이드 프로펠러가 4블레이드 프로펠러보다 약간 더 효율적이라는 것을 관찰할 수 있습니다.
요약하자면, 우리는 프로펠러의 다양한 작동 체제와 피치가 프로펠러 효율성에 미치는 영향에 대해 배웠습니다. 그런 다음 아음속 풍관에 7개의 프로펠러를 특성화하여 프로펠러 성능에 대한 피치, 직경 및 블레이드 수의 영향을 분석했습니다.
Subscription Required. Please recommend JoVE to your librarian.
Results
프리스트림 밀도, θ: 0.074 lb/ft3,결과를 결정하는 데 사용되었다. 두 블레이드, 18 x 8 프로펠러의 추력, 토크, 파워 및 프로펠러 효율의 계수의 변화는 도 4에 도시되어 있다. 프로펠러, 에어 브레이크 및 풍차 영역이 경계됩니다. 프로펠러의 2블레이드, 18 x 8은 0.6의 고급 비율로 양수 추력을 생성하며, 그 후 J 0.85까지 에어 브레이크 영역으로  전환됩니다. 이 시점과 그 이후에 프로펠러는 음의 토크를 생성하기 시작하고 풍차처럼 행동합니다. 프로펠러는 J = 0.4에서 최고 효율을 달성합니다.
전환됩니다. 이 시점과 그 이후에 프로펠러는 음의 토크를 생성하기 시작하고 풍차처럼 행동합니다. 프로펠러는 J = 0.4에서 최고 효율을 달성합니다.

그림 4. 프로펠러에서 두 블레이드, 18 x 8의 특성.
그림 5-7은 프로펠러의 CT, CQ, CP및 η 동작을 직경, 피치 및 블레이드 수의 변화와 비교합니다. 도 5에 도시된 바와 같이, 블레이드와 프로펠러 피치의 수를 유지하면서 프로펠러 직경이 달라지면서 프로펠러 효율에 무시할 수 있는 영향을 η. 그러나 주어진 고급 비율에 대한 CT, CQ및 CP는 프로펠러 직경이 감소하면서 약간 증가하였다.

그림 5. 다양한 직경의 프로펠러에 대한 특성 비교. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
다양한 프로펠러 피치는 도 6에 도시된 바와 같이 모든 매개 변수에 크게 영향을 미쳤습니다. 일반적으로 고음 프로펠러는 저피치 프로펠러에 비해 주어진 고급 비율에 대해 더 많은 추력, 토크 및 전력을 생성합니다. 프로펠러 피치가 증가하면 프로펠러 영역의 범위, 즉 양성 추력 및 토크의 큰 영역이 증가했습니다. 마지막으로 프로펠러 피치가 증가함에 따라 최대 작동 효율이 높은 고급 비율로 발생했습니다.

그림 6. 다양한 피치프로펠러의 특성비교. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
그림 7은 블레이드 수를 두 배로 늘리면 추력과 토크가 상당히 높다는 것을 보여줍니다. 프로펠러 영역은 비슷하지만 4블레이드 프로펠러는 2블레이드 프로펠러에 비해 고급 비율로 풍차처럼 행동하기 시작합니다. 또한 2블레이드 프로펠러는 4블레이드 프로펠러보다 약간 효율적입니다.

그림 7. 블레이드 수가 다양하여 프로펠러의 특성을 비교합니다. 이 그림의 더 큰 버전을 보려면 여기를 클릭하십시오.
Subscription Required. Please recommend JoVE to your librarian.
Applications and Summary
프로펠러는 소규모 항공기에 전력을 공급하는 데 사용되며 추력을 제공하는 간단한 방법을 제공합니다. 전기 또는 왕복 엔진에 부착할 수 있으며, 회전 속도를 추진력을 위해 추력으로 변환할 수 있습니다. 이 데모에서는 피치, 직경 및 블레이드 수가 다양한 7개의 프로펠러가 아음속 풍동에 장착된 프로펠러 테스트 리그를 사용하여 특징지어졌습니다. 각 프로펠러에 대해 프로펠러, 에어 브레이크 및 풍차 영역이 확인되었다. 프로펠러 직경의 효과를 연구하기 위해 수행 된 파라메트릭 연구는 직경이 감소하는 추력과 토크의 약간의 감소를 보였다. 그러나 프로펠러 피치는 명확한 이점을 갖는 고피치 프로펠러를 통해 추력 및 토크 특성에 큰 영향을 미칩니다. 또한 프로펠러 영역의 범위는 피치가 감소하여 중단됩니다. 마지막으로, 블레이드의 수를 늘리면 추력, 토크 및 프로펠러 효율이 약간 감소하여 전력이 증가합니다.
항공기 또는 선박에 적합한 추진 시스템(엔진/모터 프로펠러 조합)을 선택하여 고성능및 효율적인 공중 또는 수상 차량을 달성해야 합니다. 상세한 프로펠러 특성 데이터는 엔지니어가 항공기/선박의 모든 작동 속도에서 비행 성능 파라미터를 정확한 방식으로 평가하여 최적의 추진 시스템을 올바르게 결정할 수 있는 정확한 방법을 제공합니다.
Subscription Required. Please recommend JoVE to your librarian.