

ERRATUM NOTICE
Important: There has been an erratum issued for this article. Read more …
Summary
Bu protokol, robotik ultrason (ABD) geleneksel invaziv olmayan görüntü yöntemlerine pratik, uygun maliyetli ve hızlı bir alternatif olarak göstermektedir.
Abstract
Kemirgenlerin in vivo görüntülemesinde yaygın yöntemler pozitron emisyon tomografisi (PET), bilgisayarlı tomografi (BT), manyetik rezonans görüntüleme (MRG) ve ultrason (ABD) sayar. Her yöntemin kullanılabilirlik, kullanım kolaylığı, maliyet, boyut ve iyonlaştırıcı radyasyon veya manyetik alanların kullanımı dahil olmak üzere sınırlamaları ve avantajları vardır. Bu protokol, kemirgen böbreklerinin ve kalbinin in vivo görüntülemesi, sonraki veri analizi ve olası araştırma uygulamaları için 3D robotik ABD'nin kullanımını açıklar. Robotik ABD'nin pratik uygulamaları, toplam böbrek hacminin (TKV) ölçülmesinin yanı sıra kistlerin, tümörlerin ve vaskülatların ölçümüdür. Çözünürlük diğer modaliteler kadar yüksek olmasa da, robotik ABD daha pratik yüksek verimli veri toplama sağlar. Ayrıca, ABD M-modu görüntüleme kullanılarak kardiyak fonksiyon ölçülebilir. Böbrekler kardiyak çıkışın% 20-25'ini aldığından, kardiyak fonksiyonun değerlendirilmesi böbrek fizyolojisi ve patofizyolojisinin anlaşılması için kritik öneme sahiptir.
Introduction
In vivo kemirgen görüntüleme için en yaygın yöntemler pozitron emisyon tomografisi (PET), optik görüntüleme (OI), bilgisayarlı tomografi (BT), manyetik rezonans görüntüleme (MRG) ve ultrason (ABD) içerir. Bu teknikler, araştırmacıların hastalık modellerini invaziv olmayan bir şekilde nicel olarak değerlendirmelerine ve uzunlamasına takip etmelerine olanak tanıyarak yüksek çözünürlüklü in vivo görüntüler sağlar1. Her görüntüleme modalitesi sınırlamalara sahip olsa da, klinik öncesi araştırmalar için paha biçilmez araçlar da sağlar.
Burada, çalışma bir ABD sistemini detaylandırıyor ve robotik ve 3D kemirgen görüntüleme protokolünü sunuyor. ABD dalgaları, genellikle elle tutulan dönüştürücü adı verilen bir sonda tarafından üretilir. Ses dalgaları dokularla etkileşime girdikçe geri yansıtılır ve yankılar görüntülere yeniden oluşturulur2. Burada açıklanan protokol, robotik olarak kontrol edilen bir dönüştürücü kullanarak ve nicel değerlendirme için hızlı 3D rekonstrüksiyon sağlayan yazılım kullanarak böbrek ve kardiyak görüntülemeye odaklanacaktır.
Robotik ABD, araştırmacıların yüksek verimli ve boyuna çalışmalar yürütmelerini sağlayan hızlı, güvenilir ve invaziv olmayan bir görüntüleme yöntemidir. Elde tutulan ABD yöntemleriyle karşılaştırıldığında, robotik ABD yöntemi zaman açısından verimlidir, çünkü birkaç dakika içinde en fazla üç hayvan taranabilir. Böbrek ölçümleri için yüksek verim, saatte 20 fareye kadar görüntülenebileceğini göstermektedir. Robotik dönüştürücüler akustik membranların altında bulunur ve iki serbestlik derecesiyle hayvandan bağımsız olarak hareket eder (Şekil 1A). Bu, acemi kullanıcıların yüksek kaliteli görüntüler elde etmelerini sağlarken, elde tutulan ABD yöntemleri kullanıcı hatasına karşı daha hassastır. Birleştirilmiş yazılım verimli, gerçek zamanlı 3D böbrek rekonstrüksiyonu sağlar. Daha önce, manyetik rezonans görüntüleme (MRG), mükemmel yumuşak doku kontrastı, radyoaktivite eksikliği ve penetrasyon derinliği nedeniyle invaziv olmayan görüntüleme için yaygın bir yöntem olmuştur. Bununla birlikte, MRI genellikle uzun alım süreleri gerektirir ve gerçekleştirmesi maliyetlidir. ABD, toplam böbrek hacminin (TKV) değerlendirilmesinde MRI'a güvenilir ve daha hızlı bir alternatif olarak değerlendirilmiştir 3.
Protocol
Bu protokoldeki tüm adımlar Mayo Clinic (Rochester, MN) hayvanların kullanım yönergelerine uygun diridir ve Mayo Clinic Kurumsal Hayvan Bakım ve Kullanım Komitesi tarafından onaylanmıştır.
1. Hayvan modeli
- Ticari kaynaklardan fareler elde edin.
NOT: Çalışma için C57BL/6J (yaş = 18 ay; n = 22 (7 erkek, 15 kadın)) (Malzeme Tablosu) ve Pkd1(RC/RC) (yaş = 18 ay; n = 9 (3 erkek, 6 kadın))4 kullanıldı.
2. Epilasyon
- Bir anestezi odasında buharlaşmış izofluran (%2-% 3) kullanarak hayvanı uyuşturun. Bir parmak sıkışması yaparak hayvanın yeterince uyuşturulduğından emin olun. Farenin belirgin bir hava damlamadan yaklaşık 60-90 nefes / dakika hızında nefes aldığından emin olun.
NOT: Buharlaşmış izofluran, hayvanın anestezi seviyesini kontrol etme ve ince ayar yapma yeteneği nedeniyle seçilmiştir. %100 oksijen ile karıştırılan izoflurandan yararlanılmıştır. - ABD ölçümleri için istenen cilt bölgesini tıraş etmek için elektrikli tıraş makinesi kullanın.
NOT: Bu çalışmada böbrek ve kardiyak ölçümlere odaklanıldı, bu nedenle hayvanın göğsü ve sırtı tıraş edildi. - Depilatör kremi pamuk uçlu bir aplikatörle hayvanın tıraşlı cildine uygulayın. Kremayı kuru bir kağıt havlu kullanarak 30-60 sn sonra silin. Daha sonra, ıslak gazlı bez pedleri kullanarak tüy dökücü krem kalıntılarını silmeye devam edin. Taramalara başlamadan önce epilasyonun tamamlandığından emin olun.
NOT: Kalan saçlar görüntü kalitesini bozacaktır; tam epilasyon çok önemlidir. Bununla birlikte, hayvanın cildinin yaralanmasını önlemek için bir dakika içinde depilatory kremi silmek gerekir. Hayvanda kalan depilatör krem, ABD makinesinin görüntüleme zarını lekeleyebilir. Islak gazlı bez pedleri kullanarak hayvanın doğru temizliğini sağlayın.
3. Hayvan konumlandırma
- ABD makinesini ve ABD koyları için dahili ısıtma elemanı anahtarını açın. Kullanılacak ilgili ABD koyları için uygun anestezi kapaklarını açın.
NOT: Görüntüleme ABD yazılımına başlamadan önce ABD makinesi açık olmalıdır. - Koyları zarı örtecek kadar suyla doldurun. Uyuşturulmadaki hayvanı burun konisine yerleştirin.
- Kardiyak ölçümler için, hayvanı eğilimli bir konuma yerleştirin ve yaklaşık 30 ° sağa doğru açı verin.
- Böbrek ölçümleri için hayvanı düz ve supine bir konuma yerleştirin. Hayvan ve zar arasındaki hava ceplerini en aza indirmek için hayvanın vücudunu hafifçe düzleştirin (Şekil 1B).
NOT: Hayvanın vücudunun yanında bir parmak çalıştırmak, cilde bağlı kalan hava kabarcıklarını temizleyebilir ve bu da görüntülemeyi kesintiye uğratacaktır. ABD ortamı olarak su veya ABD tuzlu su jeli kullanın; ancak su burada tartışılan hızlı görüntülemeyi kolaylaştırır.
4. Ultrason ölçümleri
- Görüntüleme ABD yazılımında, ABD Satın Alma'yı seçin ve cihazın başlatılmasına izin verin.
- B modu kullanarak Böbrek Görüntüleme.
- Uygun iletişim kutusuna çalışma için bir ad girin.
- Uygun iletişim kutusuna hayvan kimliği girin.
NOT: En fazla üç hayvan sırayla görüntülenebilir. - 3D taramayı başlatmak için 3D etiketli sekmeye tıklayın.
- Canlı kamera akışını kullanarak, böbrekleri içermek için ilgi çekici bölgeyi (ROI) kutuya taşıyın.
NOT: Yatırım getirisinin boyutu, görüntü hedefinin boyutuna bağlı olarak ayarlanabilir. Yatırım getirisinin boyutunun artırılması tarama süresini biraz artıracaktır (Şekil 1C). Yatırım getirisi boyutuna bağlı olarak, tarayıcı dönüştürücünün tüm yatırım getirisini taraması için gereken geçiş sayısını otomatik olarak ayarlar. - İstenen görüntünün türüne bağlı olarak, dönüştürücüyü seçmek için Doğrusal Dizi veya Wobbler'ı seçin. Hızlı Tarama veya Dönüştürücü için Optimize Edilmiş arasından seçim yapın.
NOT: Doğrusal dizi daha hızlıdır ve genellikle yeterli görüntüleme sağlar. Lineer dizi ile istenen görüntü kalitesini elde edemezse yalpalayıcı dönüştürücü kullanılabilir. Yalpalayıcı dönüştürücü daha yüksek frekans dalga boyu kullanır ve bu nedenle görüntülerde daha fazla tanım sağlar. Hızlı Tarama seçeneği, daha yüksek hızda nefes düzeltmesi olmadan orta kaliteli görüntüler elde eder. Optimize edilmiş seçenek biraz daha fazla zaman gerektirirken, daha iyi görüntü kalitesi sağlar ve nefes alma düzeltmesine izin verir. Bu makale, Optimize edilmiş doğrusal dizi hazır ayarını kullanmaya odaklanacaktır. - İstediğiniz görüntüleme alanının canlı görüntüsünü görmek için Canlı Görünüm'e tıklayın.
- Dönüştürücüyü taşımak için dairesel Git düğmesine tıklayın ve ardından görüntülenecek farenin alanına tıklayın. Dönüştürücü konumunu ince bir şekilde ayarlamak için önceden belirlenmiş adım boyutlarına sahip yön oklarını kullanın.
- Ayarlar Tepsisi'ni açmak için Denetim Masası penceresinin yanındaki oku tıklatın. Tarama ayarlarını açmak için Tarama Protokolü'nü tıklatın.
- İdeal odak derinliğini belirleyin ve böbrekleri en iyi şekilde görüntülemek için görüntü kontrastını değiştirmek için TGC (zaman kazancı telafisi) kaydırıcılarını ayarlayın. İstediğiniz ayarları elde ettikten sonra, Ayarlar Tepsisi'ni kapatmak için oka tekrar tıklayın.
- 3D taramaya başlamak için Statik Al düğmesine basın.
NOT: Taramanın ilerlemesi, yazılımın sol alt kısmındaki bir ilerleme çubuğu aracılığıyla gösterilir. - Tarama tamamlandıktan sonra, taramayı Önizleme Modunda açmak için mavi indirme oka tıklayarak görüntü kalitesini kontrol edin. Pencerenin üst kısmındaki kırmızı oku sürükleyerek taramanın 3D kareleri arasında ilerleyin. Yakınlaştırmak veya uzaklaştırmak için Ctrl tuşunu basılı tutun ve faredeki kaydırma düğmesini kullanın.
- Ek hayvanları taramak için hayvan kimliği iletişim kutularını yenileyin, yeni kimlikleri girin ve yukarıdaki adımları yineleyin.
NOT: Taramalar tamamlandığında, hayvanları kurulayın ve ev kafeslerine geri verin.
- M modunu kullanarak kardiyak görüntüleme.
NOT: M modu, belirli, seçilmiş bir ultrason hattı boyunca bir ultrason dalgasının görüntülenmesidir.- Kardiyak görüntülemeyi etkinleştirmek için M Modu sekmesine tıklayın.
NOT: Aynı anda yalnızca bir hayvan görüntülenebilir. - Hayvanın kardiyak taramalar için uygun konumda olduğundan emin olun (adım 2.2). Yatırım getirisini kalbin yaklaşık konumuna taşıyın.
- Kalbi bulmak için Kalp Bulucu düğmesine basın. Dönüştürücünün konumunu optimize etmek için ısı haritasını kullanın. Dönüştürücüü sol ventriküle taşımak için dairesel Git düğmesini kullanın (Şekil 2A).
- Canlı Görünüm'e gidin ve dönüştürücüsü papiller kaslar arasına yerleştirmek için ok düğmelerini kullanın (Şekil 2B). Dönüştürücünün doğru yerleşimini doğrulamak için canlı M Modu izlemesini görüntüleyin (Şekil 2D).
- Dönüştürücü uygun konuma girdikten sonra , Edinme Sırası'na tıklayın. Tamamlanan taramayı görüntülemek için mavi indirme okuna tıklayın.
- Kardiyak görüntülemeyi etkinleştirmek için M Modu sekmesine tıklayın.
5. Böbrek analizi (analiz mekaniği)
- Görüntü Çözümlemesi sekmesini açın ve görüntü dosyalarını/klasörlerini girmek için Ses Düzeylerini Yükle düğmesini seçin.
- Segmentasyon
- Tüm düzlemlerde böbreği bulmak için çeşitli düzlemleri temsil eden renkli çizgileri hareket ettirin.
- Yeni segmentasyon eklemek için Ekle'yi tıklatın. Dosya için bir biçimlendirme adı sağlayın.
- Birden fazla düzlemde böbreğin dış kenarına noktalar eklemek için Yüzey Kesme düğmesini kullanın. Tüm böbrekte segmentasyon oluşturmak için Uygula'ya tıklayın (Şekil 3A).
- Her düzlemde farklı kareler arasında ilerleyin ve Düzenle'ye tıklayıp noktaları doğru konuma sürükleyerek yanlış bölgeleri düzenleyin.
- Alternatif olarak, böbrek düzensiz şekilliyse, böbreğin etrafında düzensiz şekilli bir iz oluşturmak için Çiz işlevini kullanın. İzleme serbestisini çizmek için kenarın etrafındaki noktaları tıklatın veya sol tıklatmaya devam edin.
- İzlemeyi Çiz düğmesiyle tamamlamak için fareyle sağ tıklatın. Birden çok kare ileri kaydırın ve izleme işlemini tekrarlayın.
- Çerçeveler tüm ilgi alanı boyunca izlenene kadar yineleyin.
- Çiz işlevi kullanılıyorsa, izlemeyi denetlemek ve ayarlamak için Dilimler Arasında Doldur'u seçin. Önizlemeyi görmek için Başlat'a tıklayın. Önizleme kabul edilebilirse Uygula'ya tıklayın. Değilse, İptal'e tıklayın ve izlemeleri değiştirin.
NOT: Sil düğmesi, izleme içindeki bir bölgenin silinmesine izin verir. Pürüzsüz düğmesi, iz bırakmanın pürüzlü kenarlarını yumuşatır. - Görüntü analizi tatmin edici olduğunda, analizi özgün görüntü dosyasına kaydetmek için Kaydet'i seçin.
- Ölçüm
- Görüntüdeki özellikleri ölçmek için Kaliperler işlevini kullanın. Kaliperler düğmesine tıklayın ve ölçülecek mesafenin iki noktasını sol tıklayın (Şekil 3B).
- Ekranın üst kısmındaki disk düğmesini tıklatarak ölçümü kaydedin.
- Segmentasyon
6. Kardiyak analiz
- Çözümlenecek dosya girişlerini yapmak için Birimleri Yükle'yi seçin.
- Ekle seçeneğini belirleyin.
- Kalp dokusunun her katmanı için systole ve diastole'yi izlemek için Nokta Yerleştirme aracını kullanın. Kalp dokusunun diğer katmanlarıyla devam edin. İzlemeleri değiştirmek için Düzenle işlevini kullanın (Şekil 2C,D).
NOT: M modu izlemesi çok açıksa, her katmanın izlemelerini otomatik olarak oluşturmak için Ekle (otomatik) düğmesini kullanın. - Kardiyak parametreleri hesaplamak için Uygula'yı seçin. Tüm verileri *.csv dosyası olarak dışa vermek için Nicele sekmesini görüntüleyin ve İstatistikleri Dışarı Aktar'ı seçin (Şekil 2E).
Representative Results
Böbrek analizi sonuçları
Yüzey alanı ve hacim verileri böbreklerin segmentasyonundan elde edilir. Bu bilgiler deneysel ve kontrol modellerini karşılaştırmak veya zaman içinde değişiklikleri izlemek için kullanılabilir. Kaliper aracı, anormallikleri (yani kistleri, tümörleri) ve zaman içinde uzunluklarının nasıl değiştiğini hızlı bir şekilde ölçmek için yararlıdır. Şekil 3 , kist hacimlerini doğru ölçmek için hem segmentasyon hem de kaliper yöntemlerinin kullanılabileceğini göstermektedir. Şekil 4 , yaşla eşleşen kontrol ve deneysel (Pkd1RC/RC) fareler arasında toplam böbrek hacminde (TKV) açık bir fark olduğunu göstermektedir. Bu hacim işlemelerinin 3B görselleştirmesi, 3B alan içindeki dönüşler de dahil olmak üzere sistem içinde gerçekleştirilebilir (Şekil 5). Bu 3D rekonstrüksiyonlar daha sonra TKV'yi hesaplamak için kullanılır (mm3; Şekil 4) bireysel büyük kist hacminin yanı sıra.
Kardiyak analiz sonuçları
M Modu görüntülerinin analizinden birçok yararlı parametre elde edilir. Bu veriler, o anda sol ventrikül (LV) kardiyak fonksiyonunun iyi bir anlık görüntüsünü sağlar. Veri çıkışı LV iç çapı, LV arka duvar, LV ön duvar çapı, ejeksiyon fraksiyonu, fraksiyonel kısaltma, inme hacmi, kalp atış hızı, kardiyak çıkış, LV hacmi ve LV kütlesini içerir. Kardiyak analizin başarısı, M Modu görüntüsündeki katmanların doğru segmentasyonuna bağlıdır. Kardiyovasküler sonuçların çoğu, arka ve ön endokardiyal tabakaların tepe sistolik ve diyastolik fazları ile hesaplanır. Arka epikardiyal tabaka parlak beyaz görünür ve arka endokardiyal katmana benzer bir desen izler. Arka endokardiyal tabakanın izlenmesi en düşük kontura yerleştirilmelidir. Ön endokardiyal tabaka, bu katmanın en yüksek konturu boyunca izlenmelidir. Ön epikardial tabaka, hayvanın eğilimli konumlandırılması nedeniyle görüntünün altında doğrusal görünür (Şekil 2D). Şekil 6 , deneysel ve kontrol fareleri arasında kardiyak çıkışta önemli bir fark olmayan bir çalışma örneği göstermektedir. Renal görüntülemede olduğu gibi 3D kardiyak görselleştirme mümkündür. Bununla birlikte, kardiyak döngünün 4D görselleştirilmesi (Ek Şekil 1), araştırmacının değerlendirilen hayvanda hem morfolojik hem de döngü dinamik anormalliklerini görselleştirmesine ve tam olarak belirlemesine olanak tanır.
Morfoloji değerlendirmesi
Hızlı ve ucuz değerlendirme için, ABD fizyolojik parametreleri uzunlamasına etkili bir şekilde izleyebilir. Bununla birlikte, birçok çalışma ayrıca kistlerin sayısı ve boyutları, kireçlenmeler (böbrek taşları), damarlanma veya fibrozis derecesi gibi daha ince morfolojik özellikleri belirlemek istemektedir. Şekil 7 , normal bir fare böbreğini kistik fare böbreği ile orta derecede kireçlenmiş bir fare böbreğini karşılaştırır. ABD merkez frekansını (doğrusal dizi ile 10 MHz) 35 MHz'e (wobbler amplifikatör) yükselterek, artan ayrıntı resimleri elde edilebilir.

Şekil 1: Ultrason sistemi ve fare yerleşimi. (A) Ultrason sisteminin şeması ve dönüştürücülerin yeri. (B) Ultrason platformunda supine pozisyonunda farelerin görünümü. (C) Hayvan kimlikleri ile ilgi alanı (böbrekler) için yerinde ilgi alanı (YG) örneği. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.

Şekil 2: Fizyolojik parametreleri elde etmek için kardiyak ultrason görüntüleme. (A) M-Mode görüntüleme için dönüştürücüyü sol ventrikülde konumlandırmak için Kalp Bulucu ısı haritası görüntüsünün kullanılması. Sol ventriküldeki dönüştürücü konumu büyük yeşil nokta ile gösterilir. (B) Papiller kasların (noktalı kutu) üzerine doğru yerleştirildiğinde dönüştürücünün görünümü. (C) Kardiyak parametreleri ölçmek için gereken katmanların örnek görünümü. (D) C panelinde olduğu gibi katmanlarla canlı M Modu görüntüsünün görünümü( Yukarıdan aşağıya katmanlar: posterior epikardial, posterior endokardiyal, ön endokardiyal ve ön epikardial.) (E) Kardiyak ölçümlerden elde edilen istatistiklerin örnek çıktısı. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.

Şekil 3: Böbrekleri ve kisti ölçmek için segmentasyon ve kaliper araçlarının kullanılması. (A) Her iki böbreğin örnek segmentasyonları (eksenel görünüm) ve aşağıda listelenen hacimlere sahip büyük bir kist (sarı). Bölümlenmemiş görünümler, izlenmeyen ABD'nin görüntülenebilmesi için altında gösterilir. (B) Aşağıdaki ölçümlerle Şekil 3A'dan aynı kisti (sagittal görünüm) ölçmek için kaliperlerin örnek kullanımı. Birim, sırasıyla a, b, c'nin göreli x, y, z olduğu bir elips (birim = (4/3)π x a x b x c formülü kullanılarak hesaplanır. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.

Şekil 4: WT ve kistik fare böbreklerinin TKV dağılımları. Vahşi tip (WT) (C57BL/6J) ve hastalıklı (Pkd1RC/RC) fareler için TKV'lerin temsili. n = 22 (WT) n = 9 (Pkd1RC/RC); İki kuyruklu t testinin sonuçları: p < 0.0001. Kutu 25-75. yüzdelik değerleri, bıyıklar ise 1,5 kat interquartile aralığını gösterir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.

Şekil 5: Segmente böbreklerin ve kistin animasyonlu 3D rekonstrüksiyonu. Yazılımı kullanarak, böbreklerin ve kistin 3D projeksiyonları 3D alanda döndürülebilir veya sallanabilir (mavi = sol böbrek; sarı = büyük kist; turuncu = sağ böbrek). Bu rakamı indirmek için lütfen tıklayınız.

Şekil 6: ABD ölçümlerinden kardiyak fizyolojik parametreler. WT ve hastalıklı (Pkd1RC/RC) fareler için kardiyak çıkışın (mL/dk) temsili. n = 22 (WT) n = 9 (Pkd1RC/RC). Alt tablolanmış veriler, bu iki grup için ejeksiyon fraksiyonu, inme hacmi, kalp hızı (İk) veya kardiyak çıkışta (CO) önemli bir fark olmadığını göstermektedir. İki kuyruklu t testinin sonuçları: p > 0.05. Kutu 25-75. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.

Şekil 7: Normal ve iki patolojinin ABD sagittal bölümlerinin karşılaştırılması. (A) Vahşi tip (C57BL/6J suşu) böbrek (TKV = 143.202 mm3). (B) TKV (Pkd1RC/RC fare) (TKV = 333.158 mm3) artmış kistik böbrek. Kistler sarı oklarla gösterilir. (C) Damar kireçlenmesi olan böbrek (Model = Düşük Yoğunluklu Lipoprotein Reseptör Eksikliği, Apolipoprotein B100-only mouse 12 ay boyunca Batı diyetini besledi5) (TKV = 127.376 mm3). Böbrek taşları yeşil oklarla gösterilir. Bu rakamın daha büyük bir sürümünü görüntülemek için lütfen buraya tıklayın.
Ek Şekil 1: ABD ölçümlerinden 4D kardiyak döngü filmi. Yazılımı kullanarak, atan kalbin bir temsili 3D ABD'de yakalanır ve kardiyak döngü boyunca yansıttır. Yeşil ok aort valfini gösterir. (Model = Düşük Yoğunluklu Lipoprotein Reseptör Eksikliği, sadece Apolipoprotein B100 fare, 12 ay boyunca Batı diyetini besledi5). Bu model, ABD'deki kireçlenmelerin daha fazla akustik yansıtıcılığı nedeniyle kalbin ve kapakçıkların daha kolay görselleştirilmesini sağlayan vasküler kireçlenmeler oluşturur. WT farelerle benzer 4D rekonstrüksiyonlar mümkündür; ancak, yakalanan akustik kontrast o kadar yüksek olmayacaktır. Bu Dosyayı indirmek için lütfen tıklayınız.
Discussion
Ultrason ses dalgalarını kullanır ve ses dalgası yayılımının önündeki herhangi bir engel görüntü kalitesini engeller. Bu nedenle, görüntülenecek bölgenin tamamen epilasyonu kritik öneme sahiptir. Hayvanın cildinde yanıklara / tahrişe neden olabileceği ve tarayıcının şeffaf zarını renksiz hale koyabileceğinden, epilasyon kreminin tamamen çıkarılmasını sağlamak da önemlidir. En iyi ses dalgası yayılımı için bölmelerdeki yeterli su seviyeleri gereklidir, bu nedenle en yüksek görüntü çözünürlüğünü elde etmek için gereklidir. Bununla birlikte, hayvan eğilimli bir konumda olduğunda, hayvanın burununun su seviyesinin üzerinde olduğundan veya hayvanın su solunması riski altında olduğundan emin olun. Görüntüleme parametrelerinin, özellikle odak derinliğinin optimizasyonu, yüksek kaliteli görüntüler elde etmek için kritik öneme sahiptir. Parametrelerde yapılan değişiklikler bireysel hayvanlar için gerekli olabilir.
Robotik ABD, geleneksel el yapımı ABD yöntemlerine göre birçok avantaj sağlar. İlk olarak, sistem basit bir işaretle ve tıkla kamera tabanlı arayüz kullanır. Bu özellik geleneksel ABD'nin karmaşıklığını ele alıyor ve acemi bir kullanıcı tarafından işletildiğinde bile tutarlı veriler üretiyor6. İkincisi, sistem akustik bir ortam olarak geleneksel ABD jeli yerine su kullanımına izin verir. Daha önce, ABD jelinin kullanımı, kaliteli görüntü alımına müdahale eden kabarcıkların oluşumuna izin verdi. Ayrıca, ABD jeli dağınıktır ve temizlik için zorluklar sağlar. Ayrıca, su ısı lambası tarafından ısıtılır ve hayvanın vücut sıcaklığının korunmasına yardımcı olur. Üçüncüsü, robotik ABD daha hızlıdır, bu nedenle solunum hareketinden elde edilen eserler sorunlu değildir. Artan görüntüleme hızı, yüksek aktarım hızı veri toplamanın pratik olarak tamamlanmasını sağlar. Dördüncüsü, robotik ABD 3D görüntüler elde eder ve bu nedenle nesnelerin 3D yeniden yapılandırılmasını kolaylaştırır (Şekil 4). MRI ve diğer yöntemler pahalıdır, zaman alıcıdır ve her zaman mevcut değildir. Daha da önemlisi, robotik ABD sistemi bir masaya veya tezgaha sığar ve daha uygun maliyetlidir. Son olarak, önceki çalışmalar robotik ABD'nin MRI3 gibi daha pahalı yöntemlerle karşılaştırılabilir ölçüm verileri sağlayabileceğini göstermiştir.
Bu çalışmada açıklanan robotik ABD sisteminin görüntü kalitesi ve çözünürlüğü önerilen uygulama için yeterli olsa da (Şekil 7), gelecekte görüntü kalitesinin iyileştirilmesinin birkaç yolu vardır. Örneğin, daha yüksek frekans dönüştürücüleri (örneğin, 50-70 MHz) kullanmak, daha iyi özellik tanımına sahip daha yüksek çözünürlüklü görüntülere neden olur. Daha yüksek frekansların kullanılması daha zayıf bir penetrasyon derinliğine neden olurken, görüntüler fare böbreği gibi yüzeysel organların in vivo görüntülemesi için yeterli olmalıdır. Diğer görüntüleme yöntemleride olduğu gibi, kontrast ajanlar belirli özellikleri geliştirmek için kullanılabilir. ABD için bu genellikle ses dalgalarını son derece yansıtan bir şey kullanmak anlamına gelir. Lipitlerin çok küçük gaz kabarcıklarını çevrelediği intravasküler mikrobubbles böyle bir ajandır. Mikron boyutlu gaz kabarcıkları son derece yansıtıcıdır ve böylece yüksek çözünürlüklü bir vaskülüre dönüşen ikinci bir belirgin sinyal sağlar7. Bu akustik kontrast tekniği oldukça yararlı olsa da, birkaç dezavantajı olabilir. İlk olarak, mikrobubbles taze yapılmalı ve sadece 5-10 dakika boyunca in vivo olarak devam etmelidir. İkincisi, in vivo intravasküler enjeksiyon tipik olarak enjeksiyon için kuyruk peçe kateterizasyonu gerektirir ve bu teknik olarak zor olabilir. Belirli koşullar ve titreşim rejimleri altında, mikrobubble görüntülemenin kendisi böbrek damar hasarına yol açabilir8.
Ayrıca, kullanılan belirli ABD sisteminin bazı genel sınırlamaları da vardır. İlk olarak, robotik kasaya yalnızca bir doğrusal dizi (18 MHz'de ortalanmış) dahildir, bu nedenle daha yüksek veya daha düşük frekanslı problara geçmek şu anda mümkün değildir. Bu, sistemle değerlendirilebilecek modellerin (daha büyük veya daha küçük) genişliğini etkileyebilir. Cihazın gelecekteki yinelemeleri, tüm klinik öncesi hayvan modellerini kapsayacak şekilde birden fazla doğrusal dizi içermelidir. İkincisi, hayvan öznesine göre dönüştürücü açısı kontrol edilemez. Bu nedenle, Doppler gibi açıya bağlı görüntüleme tekniklerini gerçekleştirmek veya belirli organların (örneğin, böbreğin uzun eksen görünümü) alternatif düzlem içi görünümlerini elde etmek, hayvanın yeniden konumlandırılmasını gerektirir ve elde edilmesi zor olabilir. Bu zorluğu iyileştirmek için robotik harekete ek serbestlik dereceleri eklenebilir. Üçüncüsü, bazen, hayvanı yüzeysel özelliklerin ve sınırların görselleştirilmesini gizleyebilen dönüştürücüden ayıran akustik zardan kaynaklanan yankılanma eserlerini gözlemledik. Bu durumlarda, hayvanı zardan uzaklaştırmak için bir jel açmazı kullanmak durumu düzeltebilir. Son olarak, ısı lambası ile sıcaklık kontrolü kesin değildir ve bu nedenle görüntüleme yaparken hayvanın çekirdek vücut sıcaklığına yakın dikkat edilmelidir. Entegre ısıtma yastığı gibi daha kontrollü ısıtma mekanizmaları, homeostaz yönetimini ve görüntüleme verimini büyük olasılıkla artıracaktır.
Robotik ABD kullanımı çeşitli araştırma alanları için geçerli olabilir. Bu teknoloji brüt doku yapılarının görselleştirilmesini sağlar, böylece tümör ilerlemesini ve potansiyel tedavileri izlemek için kullanılabilir6,9 ve burada sunulan böbrek morfolojisi. Görüntülerin özel özelliklerini segmentlere ayırabilme yeteneği, polikistik böbrek hastalığı (PKD)3 modellerini incelemek için çekici bir araç haline getirir. M-mode görüntüler, kardiyak fizyolojinin in vivo değerlendirilmesini sağlayan birçok önemli kardiyak parametrenin basit bir şekilde ölçülmesini sağlar. Böbrekler kardiyak çıkışın % 20-25'ini aldığından10, böbrek patolojisinin boyuna değerlendirilmesi sırasında kardiyak fonksiyonun anlaşılması önemlidir. Bu ABD protokolleri aracılığıyla, ABD görüntülemesinin sadece in vivo ve boyuna böbrek çalışmaları için pratik olmadığını, aynı zamanda giderek artan ABD araçlarının klinik öncesi çalışmalarda farelerin hem morfolojik hem de fizyolojik değerlendirmesini mümkün kındığını göstermeye çalıştık.
Disclosures
Birçok yazar ya SonoVol, Inc. (CJM, RCG, TJC) tarafından lisanslanan patentler tarafından istihdam edilir, önemli bir finansal çıkara sahiptir veya ortak mucitlerdir.
Acknowledgments
Bu çalışma NIH (R43-DK126607, TJC, TLK, MFR) ve Mayo Vakfı tarafından desteklendi.
Materials
| Name | Company | Catalog Number | Comments |
| Electric Razor | Braintree Scientific, Inc | CLP-9868 14 | |
| C57bk6j | The Jackson laboratory | https://www.jax.org/ | |
| Cotton gauze pads | Fisher Scientific | ||
| Cotton tipped applicators | Fisher Scientific | ||
| Depilatory cream | N/a | N/a | This study used Nair |
| Heat lamp | Included with SonoVol Vega system | ||
| Robotic Ultrasound System | SonoVol Inc | SonoVol Vega system includes anesthesia system | |
| SonoEQ Software | SonoVol | Included with SonoVol Vega system | |
| TERRELL Isoflurane | Piramal Critical Care, Inc | NDC 66794-019-10 |
References
- Cunha, L., et al. Preclinical imaging: an essential ally in modern biosciences. Molecular Diagnostics & Therapy. 18 (2), 153-173 (2014).
- Ultrasound. NIBIB. , Available from: https://www.nibib.nih.gov/science-education/science-topics/ultrasound#pid-936 (2016).
- Beaumont, N. J., et al. Assessing polycystic kidney disease in rodents: Comparison of robotic 3d ultrasound and magnetic resonance imaging. Kidney360. 1 (10), 1128-1136 (2020).
- Hopp, K., et al. Functional polycystin-1 dosage governs autosomal dominant polycystic kidney disease severity. The Journal of Clinical Investigation. 122 (11), 4257-4273 (2012).
- Weiss, R. M., Ohashi, M., Miller, J. D., Young, S. G., Heistad, D. D. Calcific aortic valve stenosis in old hypercholesterolemic mice. Circulation. 114 (19), 2065-2069 (2006).
- Czernuszewicz, T. J., et al. A new preclinical ultrasound platform for widefield 3D imaging of rodents. Review of Scientific Instruments. 89 (7), 075107 (2018).
- Chong, W. K., Papadopoulou, V., Dayton, P. A. Imaging with ultrasound contrast agents: current status and future. Abdominal Radiology (NY). 43 (4), 762-772 (2018).
- Nyankima, A. G., Kasoji, S., Cianciolo, R., Dayton, P. A., Chang, E. H. Histological and blood chemistry examination of the rodent kidney after exposure to flash-replenishment ultrasound contrast imaging. Ultrasonics. 98, 1-6 (2019).
- Rojas, J. D., et al. Ultrasound measurement of vascular density to evaluate response to anti-angiogenic therapy in renal cell carcinoma. IEEE Transactions on Biomedical Engineering. 66 (3), 873-880 (2019).
- Boron, W. F., Boulpaep, E. L. Medical Physiology. 3rd edn. , Elsevier. (2017).
Tags
Tıp Sayı 174Erratum
Formal Correction: Erratum: Use of 3D Robotic Ultrasound for In Vivo Analysis of Mouse Kidneys
Posted by JoVE Editors on 10/06/2021.
Citeable Link.
An erratum was issued for: Use of 3D Robotic Ultrasound for In Vivo Analysis of Mouse Kidneys. An author name was updated, along with the Protocol and Representative Results sections.
The name of an author was updated from:
Ryan C. Gesser
to:
Ryan C. Gessner
Step 3.1 of the Protocol was updated from:
Turn on the US machine and the heat lamp above the US platforms. Turn on the appropriate anesthesia valves for the corresponding US bays that will be used.
to:
Turn on the US machine and the switch for the internal heating element for the US bays. Turn on the appropriate anesthesia valves for the corresponding US bays that will be used.
Figue 1 in the Representative Results was updated from:
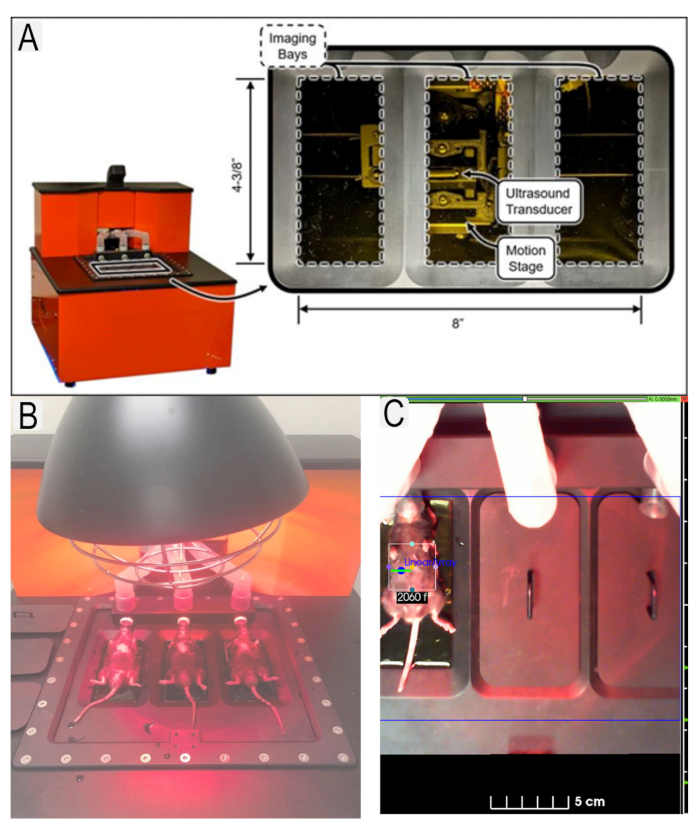
Figure 1: Ultrasound system and mouse placement. (A) Diagram of ultrasound system and location of transducers. (B) View of mice in supine position on ultrasound platform with heat lamp. (C) Example of region of interest (ROI)s in place for area of interest (kidneys) with animal IDs. Please click here to view a larger version of this figure.
to:
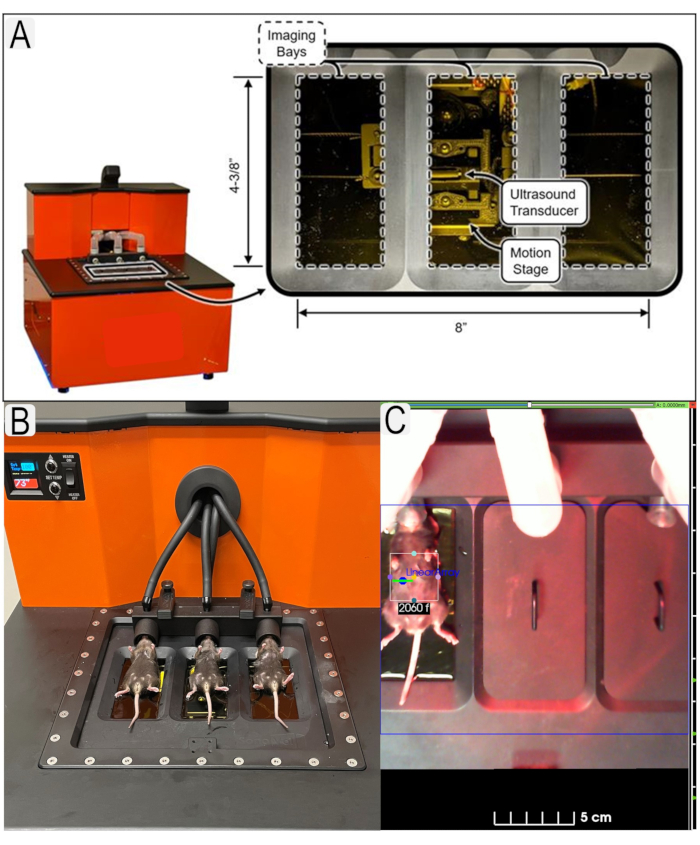
Figure 1: Ultrasound system and mouse placement. (A) Diagram of ultrasound system and location of transducers. (B) View of mice in supine position on ultrasound platform. (C) Example of region of interest (ROI)s in place for area of interest (kidneys) with animal IDs. Please click here to view a larger version of this figure.
