

Summary
ड्रोसोफिला लार्वा के कारण उनके पारदर्शी छल्ली और शक्तिशाली आनुवंशिकी के रहते इमेजिंग के लिए एक आकर्षक मॉडल प्रणाली रहे हैं. इस प्रोटोकॉल 3 instar ड्रोसोफिला लार्वा के न्यूरॉन्स के भीतर सेलुलर प्रक्रियाओं के रहते इमेजिंग के लिए 'लार्वा चिप' नामक एक एकल परत PDMS डिवाइस, उपयोग कैसे करें.
Abstract
लाइव इमेजिंग हालांकि यह जीवित पशुओं में चुनौतीपूर्ण हो सकता है सेल जैविक प्रक्रियाओं के अध्ययन के लिए एक महत्वपूर्ण तकनीक है. ड्रोसोफिला लार्वा की पारदर्शी छल्ली यह लाइव इमेजिंग अध्ययन के लिए एक आकर्षक मॉडल जीव बनाता है. बहरहाल, लाइव इमेजिंग तकनीक के लिए एक महत्वपूर्ण चुनौती noninvasively स्थिर और माइक्रोस्कोप पर एक जानवर की स्थिति है. इस प्रोटोकॉल एक polydimethylsiloxane हम 'लार्वा चिप' कहते हैं (PDMS) microfluidic डिवाइस, पर ड्रोसोफिला लार्वा immobilizing और इमेजिंग के लिए एक सरल और प्रयोग करने में आसान विधि प्रस्तुत करता है. लार्वा चिप एक सिरिंज के माध्यम से एक निर्वात के आवेदन पर, पशु immobilizes और इस तरह के तंत्रिका कॉर्ड, कमानी नसों, और शरीर के रूप में उदर संरचनाओं लाता है, जो एक पतली गिलास coverslip, से जुड़ा हुआ है कि एक सुखद ढाले PDMS microchamber के शामिल है coverslip के करीब निकटता के भीतर दीवार की मांसपेशियों,. इस उच्च संकल्प इमेजिंग के लिए अनुमति देता है, और महत्वपूर्ण बात, ane के प्रयोग से बचा जाता हैशारीरिक प्रक्रियाओं की एक व्यापक श्रेणी के अध्ययन की सुविधा जो sthetics और रसायन,. लार्वा स्थिरीकरण से आसानी से उबरने के बाद से, वे आसानी से कई इमेजिंग सत्र के अधीन किया जा सकता है. इस घंटे से दिन को लेकर समय पाठ्यक्रम से अधिक अनुदैर्ध्य अध्ययन के लिए अनुमति देता है. इस प्रोटोकॉल कदम दर कदम चिप और कैसे 3 instar लार्वा में neuronal घटनाओं के लाइव इमेजिंग के लिए चिप का उपयोग करने के लिए तैयार करने के लिए कैसे करें. इन घटनाओं axons, चोट करने के लिए कैल्शियम की प्रतिक्रियाएं, और लंबी दूरी और समय के तराजू से अधिक फोटो परिवर्तनीय प्रोटीन की तस्करी का समय व्यतीत हो पढ़ाई में organelles की तेजी से परिवहन शामिल हैं. चिप का एक अन्य आवेदन पुनर्योजी और axonal चोट के अपक्षयी प्रतिक्रियाओं का अध्ययन करने के लिए है, इसलिए इस प्रोटोकॉल का दूसरा भाग एक कमानी तंत्रिका कुचलने से परिधीय नसों के भीतर axons घायल के लिए एक नया और सरल प्रक्रिया का वर्णन है.
Introduction
फल मक्खी, ड्रोसोफिला मेलानोगास्टर, 100 से अधिक वर्षों के लिए एक मॉडल जीव के रूप में उपयोग किया गया है, और मौलिक संकेतन और अकशेरुकी से मानव को संरक्षित कर रहे हैं कि विकास के रास्ते को परिभाषित करने में महत्वपूर्ण भूमिका निभाई साबित कर दिया है. विशिष्ट प्रकार की कोशिकाओं में fluorescently टैग प्रोटीन व्यक्त करने के लिए उपलब्ध कई आनुवंशिक उपकरण हैं, खासकर इसलिए लाइव इमेजिंग सेलुलर तंत्र के अध्ययन के लिए एक महत्वपूर्ण दृष्टिकोण है, और सरल शरीर योजना और ड्रोसोफिला लार्वा की पारदर्शी छल्ली यह लाइव इमेजिंग के लिए एक आकर्षक व्यवस्था करता है.
लाइव इमेजिंग तकनीक के लिए एक महत्वपूर्ण चुनौती noninvasively स्थिर और माइक्रोस्कोपी के लिए एक जानवर की स्थिति है. परम्परागत स्थिरीकरण दृष्टिकोण जानवर को मार, जो दोनों के विच्छेदन 1,2 या क्लोरोफॉर्म का उपयोग शामिल है. निश्चेतक ईथर 4 और isofluorane 5-8 भी इस्तेमाल किया गया है. निश्चेतक कई लाभ प्रदान करते हैं, वे भी इसलिए अध्ययन प्रक्रिया को प्रभावित और जानवर पर तनाव बना सकते हैं, तंत्रिका गतिविधि और (दिल की धड़कन सहित) महत्वपूर्ण फिजियोलॉजी 9-11 रोकना. आकाश और isofluorane के साथ काम करने के लिए मानव सुरक्षा चिंताओं भी कर रहे हैं.
हम 'लार्वा' चिप 12 कॉल जो एक परत PDMS microfluidic डिवाइस, में ड्रोसोफिला लार्वा को स्थिर करने के लिए एक दवा मुक्त विधि विकसित की है. इस प्रोटोकॉल प्राप्त या लार्वा चिप बनाने का वर्णन कैसे होगा, और जल्दी मंचन 3 instar लार्वा में रहते इमेजिंग के लिए इसे उपयोग करने के लिए कैसे. चिप एक सिरिंज के माध्यम से एक निर्वात के आवेदन पर, कोमल यांत्रिक शक्ति के माध्यम से पशु immobilizes है, जो एक सुखद ढाले microchamber, के शामिल है. स्थिरीकरण विधि ऐसी एक गिलास coverslip के करीब निकटता के भीतर तंत्रिका कॉर्ड, कमानी नसों, और शरीर दीवार की मांसपेशियों के रूप में उदर संरचनाओं लाता है. इस उच्च संख्यात्मक कोल के साथ ऐसी संरचनाओं के उच्च संकल्प इमेजिंग के लिए अनुमति देता हैसंरचना (उच्च वृद्धि) के उद्देश्यों.
(मैं) लार्वा चिप के प्रयोग unanesthetized जानवरों के vivo इमेजिंग के लिए अनुमति देता है, रसायनों के उपयोग को बदल देता है: अन्य परम्परागत तकनीकों से अधिक लार्वा चिप के लाभ में निम्न शामिल हैं. (Ii) लार्वा तुरंत (isofluorane 8,13 के लिए एक 2 घंटा वसूली की अवधि के विपरीत) चिप से रिहाई के बाद ठीक हो. इस घंटे और दिन के लिए, मिलीसेकंड से मिनट से लेकर व्यापक समय तराजू, अधिक इमेजिंग के लिए अनुमति देता है. (Iii) एक गैस पारगम्य सामग्री है जो PDMS, का उपयोग लार्वा शरीर में वातावरण से ऑक्सीजन / हवा के निरंतर प्रसार के लिए सक्षम बनाता है. (Iv) चिप का उपयोग करने के लिए आसान और सुरक्षित है, और (v) यह पुन: प्रयोज्य है, और एक कम कीमत पर निर्मित किया जा सकता.
लार्वा चिप का उपयोग के लिए निर्देश के अलावा, इस प्रोटोकॉल 3 instar लार्वा में neuronal घटनाओं का अध्ययन करने के लिए इसके उपयोग के कई उदाहरण प्रदान करेगा. ये axona का जीना इमेजिंग शामिलएल परिवहन, चोट करने के लिए कैल्शियम की प्रतिक्रियाएं, और लंबी दूरी और समय के तराजू से अधिक फोटो परिवर्तनीय प्रोटीन की तस्करी का समय व्यतीत हो पढ़ाई.
चिप का एक अन्य आवेदन axonal चोट करने के लिए neuronal प्रतिक्रियाओं का अध्ययन करने के लिए है. इस के लिए एक अतिरिक्त प्रक्रिया एक कमानी तंत्रिका कुचलने से परिधीय नसों के भीतर axons घायल के लिए (भाग 3) में वर्णित है. यह सरल परख एक ही समय में संसाधित करने के लिए कई जानवरों के लिए अनुमति देता है एक मानक विच्छेदन stereomicroscope के तहत दोनों तेजी से और reproducibly किया जा सकता है. चोट के लिए सेलुलर प्रतिक्रियाओं लार्वा चिप में रहते इमेजिंग द्वारा अध्ययन किया जा सकता है.
Protocol
1. PDMS चिप बनाने
SU-8 ढालना से एक PDMS चिप बनाने के लिये कदम 1.1-1.7 का पालन करें. एक चिप पर हाथ है, लेकिन प्रयोग के लिए इकट्ठे करने की जरूरत है, 1.8 कदम को छोड़.
- PDMS आधार के 45 ग्राम और एक छोटे डिस्पोजेबल प्लास्टिक कंटेनर में एक PDMS किट से एजेंट (10:1 अनुपात) के इलाज के 4.5 ग्राम मिलाएं और अच्छी तरह से एक प्लास्टिक की हलचल स्टिक के इस्तेमाल से उन्हें मिश्रण.
- किसी भी बुलबुले को दूर करने के लिए 10 मिनट के लिए एक निर्वात कंटेनर (जैसे एक desiccator) में कंटेनर रखें.
- व्यास प्लास्टिक पकवान में एक 150 मिमी के तल पर SU-8 ढालना प्लेस और धीरे धीरे मोल्ड पर PDMS मिश्रण डालना. PDMS डालने का कार्य करते हुए बुलबुले उत्पन्न करने के लिए नहीं ख्याल रखना.
- 4 घंटे के लिए 650 डिग्री सेल्सियस पर एक ओवन (या इनक्यूबेटर) में PDMS इलाज.
- ओवन से ठीक हो PDMS/SU-8 मोल्ड निकालें और यह एक कुछ मिनट के लिए शांत करते हैं.
- एक रेजर ब्लेड का प्रयोग, SU-8 ढालना की बढ़त के साथ ठीक PDMS कटौती और SU-8 ढालना से अलग.
- PDMS स्लैब फूट डालोएक रेजर ब्लेड का उपयोग कर व्यक्ति PDMS चिप्स में.
- एक 21 जी वितरण सुई का प्रयोग, PDMS चिप (चित्रा 1 ए में दर्शाया) वैक्यूम बंदरगाह में एक छेद प्रहार.
- एक 23 जी वितरण सुई ले लो और सुई ताला हब से टिप बंद तोड़ने के लिए अपने बेस से एक बार कुछ सुई टिप मोड़.
- ट्यूबिंग सुई का कम से कम एक मिलीमीटर शामिल किया गया है, ताकि पॉलीथीन ट्यूबिंग का एक छोटा सा टुकड़ा में 23 ग्राम सुई नोक डालें. तो फिर दूर सुई से अतिरिक्त ट्यूबिंग कटौती करने के लिए एक रेजर ब्लेड का उपयोग करें. इस निर्वात सेवन बंदरगाह में डाला जब एक मुहर बनाएगा जो सुई के एक छोर के चारों ओर एक प्लास्टिक की अंगूठी, बनाता है.
- एक औंधा माइक्रोस्कोप (आंकड़े 1 बी और 2A बी) के साथ प्रयोग के लिए: वैक्यूम बंदरगाह के छेद में 23 ग्राम सुई नोक डालें. एक ईमानदार माइक्रोस्कोप (आंकड़े 1 सी और -2 सी डी) के साथ प्रयोग के लिए: एक 21 जी dispe साथ PDMS चिप की तरफ एक दूसरे छेद प्रहारसुई nsing, इस छेद की ओर से पहला छेद करने के लिए पहुँच प्रदान करेगा. फिर ओर छेद में ट्यूबिंग अंगूठी के साथ 23 जी सुई नोक डालें. शीर्ष छेद (चित्रा 1C) सील करने के लिए PDMS चिप के शीर्ष पर दो तरफा टेप का एक टुकड़ा रखें.
- लंबाई में लगभग 20 सेमी है कि पॉलीथीन ट्यूबिंग का एक टुकड़ा ले. वैक्यूम बंदरगाह में डाला जाता है कि सुई टिप करने के लिए ट्यूबिंग के एक तरफ से कनेक्ट करें.
- (माल की सूची में ''3 तरह से पानी निकलने की टोंटी देखें) एक 3 तरह वाल्व के बंदरगाहों में से एक के लिए ट्यूबिंग के दूसरी ओर कनेक्ट
- शेष दो बंदरगाहों में से एक में एक 20 मिलीलीटर सिरिंज देते हैं. पिछले बंदरगाह में पर्यावरण के लिए खुला है.
2. लाइव इमेजिंग के लिए लार्वा चिप का उपयोग
- पारदर्शी चिपकने वाला टेप के साथ PDMS चिप साफ करें. चिप के नीचे करने के लिए टेप का एक टुकड़ा देते. सुनिश्चित करें कि टेप पूरे PDMS सतह को छू रहा है, और तब टेप छील.
- यकीन है कि वहाँ बनाने के लिए ऊपर चरण 2-3X दोहराएँPDMS चिप की सतह पर (पिछले प्रयोगों से बनाए रखा) कोई कण या तेल. PDMS चिप पुन: प्रयोज्य है, यह है कि यह कांच के लिए PDMS की आसंजन प्रभावित और अपर्याप्त सील कर सकते हैं परिणाम के रूप में तेल अवशेषों को हटाने के लिए बहुत महत्वपूर्ण है.
- पानी युक्त एक पेट्री डिश के लिए 3 instar लार्वा जल्दी (यानी foraging) स्थानांतरण. (Foraging 3 instar चरण लार्वा बल्कि संस्कृति शीशी की ओर से, भोजन में कर रहे हैं). संस्कृति के माध्यम से दूर करने के लिए पानी में लार्वा स्नान.
- एक स्वच्छ कांच coverslip लो और इसके केंद्र में हेलोकार्बन 700 तेल की एक छोटी सी बूंद जगह है.
- संदंश का प्रयोग, धीरे लेने के लिए एक साफ, (लार्वा लंबाई में ~ 3.5-4 मिमी होना चाहिए) पानी से 3 instar लार्वा प्रारंभिक मंचन किया. अतिरिक्त पानी निकालने के लिए, और फिर तेल बूंद पर जगह एक हल्के पोंछ या कागज तौलिया पर संक्षेप में पशु रखें. बूंद काफी छोटा लार्वा की श्वासनली में लिपटे नहीं कर रहे हैं कि ऐसा होना चाहिए. लार्वा स्टेशन चलो10 सेकंड के लिए पानी का गेंद पर वाई.
- तेल बूंद से लार्वा निकालें और फिर एक साफ कांच coverslip पर जगह है.
- एक और स्वच्छ कांच coverslip को लार्वा स्थानांतरण. यह कदम अतिरिक्त तेल निकालता है.
- लार्वा उन्मुखीकरण पर ध्यान दे. तंत्रिका कॉर्ड और कमानी नसों इमेजिंग के लिए, लार्वा के उदर पक्ष coverslip पर बैठना चाहिए. दो अनुदैर्ध्य सांस की नली ट्यूब विशेषता द्वारा अपनी पृष्ठीय पक्ष, ऊपर का सामना करना चाहिए. नोट: इस लार्वा स्वाभाविक रूप से पसंद अभिविन्यास है.
- धीरे लार्वा के शीर्ष पर PDMS चिप जगह है. लार्वा वैक्यूम बंदरगाह की ओर उन्मुख इसकी पूंछ के साथ, microchamber का केंद्र मध्य तक गठबंधन किया जाना चाहिए. लार्वा चैंबर के किनारों को छूने नहीं है कि सावधान रहें. यह पूर्वकाल और कूल्हों सांस की नली टर्मिनलों के लिए विशेष रूप से महत्वपूर्ण है. नोट: इस चरण को सर्वश्रेष्ठ एक stereomicroscope के तहत किया जाता है.
- एक अच्छा मुहर प्राप्त करने के लिए कांच coverslip के खिलाफ PDMS चिप पुश. लार्वा पूरी तरह से है कि यह सुनिश्चित करेंPDMS चिप गिलास coverslip को छू रहा है जब microchamber से घिरा.
- सिरिंज एक निर्वात पैदा करने के लिए (ट्यूबिंग के माध्यम से) PDMS microchamber से हवा को आकर्षित कर सकते हैं कि इस तरह के पर 3 तरह वाल्व स्विच.
- एक हाथ से मजबूती से PDMS चिप / कांच coverslip पकड़. सिरिंज सवार खींचने के लिए दूसरे हाथ का प्रयोग करें. प्रतिरोध वैक्यूम बनाने के लिए, सिरिंज संभाल में लगा है, जब तक हवा में 2-2.5 मिलीलीटर वापस ले लें. वैक्यूम PDMS चिप, तेल, और coverslip इंटरफेस के बीच एक तंग सील उत्पादन और लार्वा की गतिशीलता सीमित.
- PDMS चिप सिरिंज से और वातावरण से अलग है कि इस तरह के बंद वाल्व स्विच. नतीजतन, एक अपेक्षाकृत स्थिर निर्वात स्तर सिरिंज सवार आयोजित करने के लिए आवश्यकता के बिना microchamber में बनाए रखा है.
- पूरे पशु शरीर microchamber अंदर रखा, और पशु स्थिर है कि है कि यह सुनिश्चित करना त्रिविमेक्ष तहत लार्वा की जांच करें. श्वासनली दिखाई जानी चाहिए. के बाकीPDMS चिप coverslip के साथ संपर्क में होना चाहिए. नोट: सही ढंग से चिप में स्थिर जानवरों के उदाहरण के लिए आंकड़े 2 ई और 2 एफ देखें. कुछ गलत झुकाव आंकड़े 2 जी और 2H में दिखाया गया.
- माइक्रोस्कोप पर लार्वा चिप (PDMS चिप + कांच coverslip) रखें. लार्वा चिप, ट्यूबिंग और सिरिंज coverslip से PDMS चिप की टुकड़ी से बचने के लिए सावधानी से नियंत्रित किया जाना चाहिए. एक ईमानदार माइक्रोस्कोप के लिए, दो तरफा टेप (चित्रा 1C) के साथ खुर्दबीन चरण के लिए चिप की 'टॉप' पक्ष को ठीक.
- ब्याज की जानवर की संरचना (एस) का पता लगाने और इमेजिंग प्रदर्शन करने के लिए एक उच्च बढ़ाई उद्देश्य (तेल विसर्जन, 40-63X सिफारिश की है) का प्रयोग करें. कुछ मामलों में, एक कम बढ़ाई उच्च वृद्धि करने के लिए स्विच करने से पहले इमेजिंग के लिए वांछित क्षेत्र की पहचान करने की जरूरत हो सकती है.
- इमेजिंग पूरा हो गया है, स्थिति के लिए वाल्व स्विचन द्वारा वैक्यूम रिलीजकि पर्यावरण के लिए खुला है.
- Coverslip से PDMS चिप को अलग करें. लार्वा तुरंत गतिशील होना चाहिए.
- Microchamber से लार्वा को हटाने और धीरे वसूली के लिए एक अंगूर का रस अगर प्लेट पर लार्वा जगह संदंश का प्रयोग करें.
3. लारवल कमानी नसों को एक तंत्रिका कुचलने चोट उत्प्रेरण
- अलग करने के लिए ऊपर 2.3 कदम का पालन करें जल्दी वांछित जीनोटाइप के 3 instar लार्वा का मंचन किया. 2.3 कदम में वर्णित के रूप में भोजन को निकालने के लिए पानी में लार्वा स्नान.
- सीओ के साथ, एक मानक मक्खी सीओ 2 anesthetization स्टेशन का उपयोग 2 पैड लार्वा को वश में करने के लिए, एक विच्छेदन stereomicroscope के तहत रखा. लार्वा 1-2 मिनट के लिए सीओ 2 पैड पर नियुक्ति के बाद immotile बन जाना चाहिए.
- अब stereomicroscope के तहत एक अंगूर का रस अगर प्लेट पर एक एकल anesthetized लार्वा जगह है. उदर तंत्रिका कॉर्ड और कल्पना (छल्ली के माध्यम से नसों कमानी अप करने के लिए पशु उदर की ओर मुड़ें
- Dumostar संख्या -5 संदंश का प्रयोग, कसकर 5-10 सेकंड के लिए छल्ली के माध्यम से कमानी नसों चुटकी. यह सही ढंग से किया जाता है, छल्ली बरकरार है और शरीर की दीवार में छेद नहीं है. नोट: चोट, पूर्वकाल पीछे शरीर अक्ष के साथ विभिन्न पदों पर आयोजित किया जा सकता जब तक कि उदर तंत्रिका कॉर्ड, लार ग्रंथियों, और आंतों के रूप में क्षतिग्रस्त नहीं कर रहे हैं. चित्रा 3 डी में दिखाया गया है सबसे प्रभावी चोट स्थान, 3 पेट खंड के अंत की ओर है. इस स्थान हर्जाना सबसे नसों में चोट और जानवर की हत्या के बिना पुन: पेश करने के लिए सबसे आसान है.
- चोट के बाद, पशु बारी नीचे अंगूर थाली पर अपने उदर पक्ष सकें. यह अपने सिर ले जाने और खाने के लिए सक्षम होना चाहिए. चोट सफल रहा था, तो लार्वा के पीछे आधा रुक जाएगा.
- 25 में अंगूर का रस अगर प्लेट पर घायल जानवरों को रखने और# 176; सी प्रयोगात्मक उद्देश्य के अनुसार वांछित समय के लिए. Motoneurons के लिए, समीपस्थ स्टंप चोट 14 के 8-10 घंटे के भीतर अंकुरित करने के लिए शुरू होता है, और बाहर का स्टंप 6-8 घंटा 15 के भीतर पतित शुरू होता है. चतुर्थ श्रेणी दा संवेदी न्यूरॉन्स के लिए, समीपस्थ स्टंप चोट के बाद 3-4 घंटे के भीतर पतित 4-6 घंटा, और बाहर का स्टंप शुरू भीतर अंकुरित करने के लिए शुरू होता है. नोट: उपयुक्त Gal4 ड्राइवरों और फ्लोरोसेंट पत्रकारों के साथ, अंकुरण और अध: पतन (उदाहरण के लिए, 6 चित्र देखें) लार्वा चिप में मनाया जा सकता है.
Representative Results
लार्वा चिप जिसका डिजाइन चित्र 1 में योजनाबद्ध में उल्लिखित है एक परत PDMS ब्लॉक, (एक PDMS चिप) के शामिल है. (यह भी अपने ही ढालना डिजाइन करने के लिए अनुपूरक DXF फ़ाइल देखें). लार्वा microchamber, वैक्यूम बंदरगाह, और परिधि चैनल (चित्रा 1 ए) PDMS चिप में 140 माइक्रोन indentations हैं. चिप एक के शीर्ष पर तैनात है जल्दी तेल (आंकड़े 1 बी और 1 सी) के साथ एक coverslip के शीर्ष पर टिकी हुई है, जो 3 instar लार्वा, का मंचन किया. coverslip और PDMS चिप के बीच तेल कांच इंटरफ़ेस एक हल्के वैक्यूम के आवेदन पर बनाया जाना करने के लिए एक मुहर के लिए अनुमति देता है. इस सील कक्ष के भीतर लार्वा जाल, और जल्दी मंचन के बाद 3 instar लार्वा कक्ष कुछ शारीरिक जानवर पर कसना, प्रभावी ढंग से immobilizing और अपने आंदोलन सीमित बनाता सील, चैम्बर की तुलना में थोड़ा मोटा है. इस immobilized राज्य में, कुछ उदरइस तरह के उदर तंत्रिका कॉर्ड और कमानी के रूप में शरीर संरचनाओं, coverslip के करीब धकेल रहे हैं. Immobilized राज्य में इन संरचनाओं 40X और 63X उद्देश्यों का काम दूरी के भीतर झूठ कर सकते हैं, क्योंकि यह इमेजिंग के लिए फायदेमंद है. निर्वात जारी किया है, के बाद लार्वा आसानी अतिरिक्त प्रयोगों का प्रदर्शन करने की अनुमति, microchamber से हटाया जा सकता है. यह विशुद्ध रूप से यांत्रिक स्थिरीकरण दृष्टिकोण को 1 घंटा 12 की निरंतर स्थिरीकरण समय के बाद जिंदा लार्वा के 90% रख सकते हैं.
निर्वात एक साधारण 20 मिलीलीटर सिरिंज, इसलिए पूरी यूनिट कक्ष में पोजीशनिंग रहते इमेजिंग किया जाता है जहां एक confocal या epifluorescence माइक्रोस्कोप, करने के लिए किया जाता है जहां एक stereomicroscope, से परिवहन के लिए आसान है के द्वारा बनाई गई है. कदम 1.6-1.14 में वर्णित के रूप में सिरिंज, (हटाया लॉक केन्द्रों के साथ) पॉलीथीन ट्यूबिंग और 23 ग्राम वितरण सुई के माध्यम से वैक्यूम बंदरगाह से जुड़ा है. उल्टे माइक्रोस्कोप, टयूबिंग के लिएऔर सिरिंज चिप (आंकड़े 1 बी, 2A, और 2 बी) के शीर्ष के माध्यम से जुड़े हुए हैं. ईमानदार माइक्रोस्कोप के लिए, वे चिप के किनारे पर एक बंदरगाह (आंकड़े 1C, 2C, और 2 डी) के माध्यम से जुड़े हुए हैं. उल्टे माइक्रोस्कोप के विन्यास का उपयोग करने के लिए कुछ हद तक आसान है. सिरिंज फँसाने और कक्ष के भीतर लार्वा immobilizing, coverslip और PDMS डिवाइस के बीच एक तंग सील के लिए फार्म का तेल गिलास PDMS इंटरफ़ेस बांधता है जो एक कोमल निर्वात (लगभग 10 साई), बनाने के लिए खींच लिया है.
microchamber में लार्वा की नियुक्ति (प्रोटोकॉल में 2.7-2.10 कदम) के प्रभावी स्थिरीकरण और अस्तित्व (आंकड़े 2 ई एच) के लिए महत्वपूर्ण है. जानवर भी चित्रा (2 जी), चैम्बर के लिए बड़े, या है, तो अपने सिर या ट्रेकिआ चैंबर के किनारे और कवर के बीच पकड़ा हो जाते हैंहोंठ (चित्रा 1H), तो यह प्रक्रिया जीवित रहने की संभावना नहीं है.
निम्नलिखित न्यूरॉन्स में विभिन्न सेलुलर प्रतिक्रियाओं का अध्ययन करने के लार्वा चिप (4-7, मूवी S1 और मूवी S2 आंकड़े) के उपयोग के कई उदाहरण हैं.
तेज axonal परिवहन की इमेजिंग: लार्वा चिप छवि व्यक्ति परिधीय axons भीतर synaptic vesicles के kinesin की मध्यस्थता परिवहन (चित्रा 4 और मूवी S1) के लिए इस्तेमाल किया गया था अग्रगामी (~ 1.0 माइक्रोन / सेक) और प्रतिगामी (~ 0.8 माइक्रोन / सेक. इन vesicles के) आंदोलन को आसानी से एक कताई डिस्क confocal खुर्दबीन पर एकत्र फिल्मों से अध्ययन किया जा सकता है.
लेजर microsurgery के लिए पशु पोजिशनिंग:. एक संवेदी न्यूरॉन dendrite (5 चित्रा और मूवी S2) एक स्पंदित यूवी डाई लेजर का उपयोग transected गया था टी के इस्तेमाल के लिए प्रोटोकॉलmicrosurgery के लिए उनकी विधि कहीं 16,17 पाया जा सकता है. कुशल स्थिरीकरण तकनीक का पता चला है और मापा जा (आनुवंशिक रूप से इनकोडिंग सीए 2 + सूचक GCamp3.0 18 के द्वारा खोजा) intracellular कैल्शियम में परिवर्तन, के रूप में घायल न्यूरॉन में तेजी से समय के पैमाने में बदलाव, (चित्रा 5) की अनुमति देता है.
चोट के पुनर्योजी और अपक्षयी प्रतिक्रियाओं का अध्ययन: पशु इमेजिंग सत्र के बीच में आराम करने की अनुमति दी है, लार्वा चिप तो समय पैमाने की एक बड़ी रेंज से अधिक होती है कि सेलुलर घटनाओं का अध्ययन करने के लिए इस्तेमाल किया जाएगा. उदाहरण के लिए, 'पुनर्योजी' और 15 घंटे के एक समय के पैमाने पर जगह ले जो axonal चोट, के लिए अपक्षयी प्रतिक्रियाओं दोनों, लार्वा चिप (चित्रा 6) में imaged किया जा सकता है. इस उदाहरण में, octopaminergic motoneurons के axons प्रोटोकॉल के भाग 3 में वर्णित कमानी तंत्रिका क्रश (चित्रा 3), के माध्यम से घायल हो गए. समीपस्थ अक्षतंतु स्टंप,नई अंकुरण आए और varicosities फार्म और फिर Wallerian अध: पतन की प्रक्रिया के माध्यम से खंडित हो जो बाहर का axons, चोट के बाद imaged और अलग अलग समय अंतराल पर अध्ययन किया जा सकता है.
Vivo में समय के साथ photoconvertible फ्लोरोसेंट प्रोटीन ट्रैकिंग: जिसका प्रतिदीप्ति पराबैंगनी प्रकाश के संपर्क पर अचल परिवर्तन photoconvertible फ्लोरोसेंट प्रोटीन,) का विकास एक विशेष रूप से एक कोशिका के भीतर प्रोटीन के एक सबसेट लेबल, और समय 19 से अधिक लेबल प्रोटीन के भाग्य को ट्रैक करने की अनुमति देता है , 20. इस तकनीक को सबसे अधिक एक विवो में परिभाषित कोशिकाओं के भीतर आनुवंशिक रूप से इनकोडिंग photoconvertible प्रोटीन को ट्रैक कर सकते हैं लार्वा चिप के साथ, हालांकि, सेल संस्कृति में आयोजित किया जाता है. एक उदाहरण के रूप में हम Denda2-α-ट्यूबिलिन संलयन प्रोटीन, चतुर्थ श्रेणी दा संवेदी न्यूरॉन्स में व्यक्त बताते हैं कि, आंकड़े 7A (सेल शरीर में photoconverted और किया जा सकता है
वर्णित उदाहरण के सभी (आंकड़े 4-7 और सिनेमा S1 और S2) एक Nipkow CSU10 स्कैनर और एक C9100-50 EMCCD कैमरे से मिलकर, एक कताई डिस्क confocal प्रणाली का उपयोग imaged थे, 63X (1.5 एनए) के साथ एक Axio प्रेक्षक पर घुड़सवार तेल उद्देश्य, और Volocity अधिग्रहण सॉफ्टवेयर का उपयोग कर संचालित.

चित्रा 1. लार्वा चिप का उपयोग करने के लिए मजबूत> योजनाबद्ध कार्टून.
(ए) के लार्वा चिप एक गिलास coverslip का पालन हल्के नीले रंग में संकेत दिया PDMS चिप, के शामिल है. चिप सफेद में संकेत 140 माइक्रोन मोटी microfluidic चैनलों, शामिल हैं. केंद्रीय microchamber snugly एक प्रारंभिक (हल्के हरे रंग में cartooned) 3 instar ड्रोसोफिला लार्वा का मंचन फिट करने के लिए बनाया गया है. मोल्ड डिजाइन करने के लिए इस्तेमाल किया जा सकता है कि सटीक आयाम युक्त एक DXF फ़ाइल अनुपूरक डेटा के रूप में प्रदान की जाती है. स्केल बार = 1.5 मिमी. एक लार्वा चिप में एक लार्वा को लोड करने के लिए schematics की (ईसा पूर्व) साइड देखा गया. लार्वा नीचे एक coverslip पर उदर पक्ष बैठता है, और अपने शरीर से 140 माइक्रोन गहरी microchamber भीतर निहित है. एक 20 मिलीलीटर सिरिंज वैक्यूम सेवन बंदरगाह से जुड़ा है और कोमल निर्वात उत्पन्न करने के लिए प्रयोग किया जाता है. हेलोकार्बन तेल PDMS गिलास इंटरफ़ेस microchamber में लार्वा को प्रतिबंधित जो एक तंग सील, में वैक्यूम से बाध्य है. इस सील आसानी से प्रतिवर्ती हैसिरिंज से दबाव जारी करके, जिसके बाद पशु तुरंत गतिशीलता आएगा. ईमानदार माइक्रोस्कोप (बी) के लिए, सिरिंज वैक्यूम चिप के ऊपर से Polyethylene-50 टयूबिंग के माध्यम से जुड़ा हुआ है. चिप के 'टॉप' डबल पक्षीय टेप के माध्यम से खुर्दबीन मंच से जुड़ा हुआ है, जबकि औंधा माइक्रोस्कोप (सी) के लिए, इन कनेक्शन, चिप की ओर से किए जाते हैं.

चित्रा 2. PDMS चिप्स और लार्वा की सही स्थिति की छवियाँ.
(ई.). औंधा और ईमानदार माइक्रोस्कोप के लिए PDMS चिप्स दिखा फोटो. 23 ग्राम वितरण सुई टिप निर्वात (सिरिंज) के लिए ट्यूबिंग के माध्यम से कनेक्शन के लिए सक्षम बनाता है, जो निर्वात बंदरगाह में डाला गया है. स्केल बार = 1.5 मिमी. (एह). ड्रोसोफिला लार्वा के उज्ज्वल क्षेत्र छवियों. ई और सही ढंग से स्थिर जानवरों के एफ शो उदाहरण हैं. लंबे समय तराजू (> 12 घंटा) से अधिक एकाधिक छवियों आयोजित किया जाएगा अगर एफ में छोटे पशु के लिए बेहतर है. जी बहुत बड़ी है कि एक जानवर से पता चलता है, और एच गलत तरीके से तैनात है कि एक छोटा सा जानवर को दर्शाता है. स्केल बार = 1.5 मिमी. बड़ी छवि को देखने के लिए यहां क्लिक करें.

ड्रोसोफिला लार्वा में कमानी नसों के चित्रा 3. तंत्रिका कुचलने चोट.
(ए) के तंत्रिका कुचलने परख का कार्टून. एक 3 भीतर कमानी नसों (बी) देखें तंत्रिका कुचलने के बाद 20 घंटा विच्छेदित. विरोधी एचआरपी एंटीबॉडी (लाल) के साथ neuronal झिल्ली के लिए immunostaining मस्तिष्क लोब, उदर तंत्रिका कॉर्ड, और motoneuron और संवेदी न्यूरॉन अक्षतंतु होते हैं जो लंबे कमानी नसों पर प्रकाश डाला गया. व्यक्तिगत motoneurons के एक सबसेट M12-Gal4 ड्राइवर के साथ यूएएस mCD8-GFP (हरा) की अभिव्यक्ति ड्राइविंग द्वारा चिह्नित कर रहे हैं. उनके axons कमानी नसों के माध्यम से शरीर दीवार की मांसपेशियों के लिए परियोजना, जबकि सेल शरीर और इन न्यूरॉन्स से डेन्ड्राइट, उदर तंत्रिका कॉर्ड में झूठ बोलते हैं. (यह ड्राइवर भी एक साथ पशु के दोनों तरफ पूर्वकाल पीछे धारियों के रूप में देखा जा सकता है, जो प्रत्येक लार्वा hemisegment के लिए पेशी 12 में GFP अभिव्यक्ति ड्राइव). कुचलने से क्षतिग्रस्त क्षेत्र नीले बिंदीदार लाइनों के साथ प्रकाश डाला है. स्केल बार = 70 माइक्रोन. (सी) क्षतिग्रस्त axons, चोट के बाद 20 घंटे के विचारों को बंद. वाम:समीपस्थ अक्षतंतु अंकुरण आया है और नए विकास किया है. अधिकार: बाहर का अक्षतंतु थोड़ा GFP कारण Wallerian अध: पतन और मलबे की निकासी के लिए, शेष के साथ खंडित है. स्केल बार = एक प्रारंभिक 3 instar लार्वा में तंत्रिका कुचलने के 10 माइक्रोन. (डी) छवियों. उदर तंत्रिका कॉर्ड को लाल तीर अंक. प्रोटोकॉल पाठ (प्रोटोकॉल 3) के रूप में वर्णित कुचलने का स्थान, 3 खंड के नीचे की ओर है. डी में छवियों मूल रूप से जे में प्रकाशित किए गए थे सेल बॉय 191, 211-223, doi:.. 10.1083 (2010) बड़ी छवि को देखने के लिए यहां क्लिक करें.

चित्रा 4. पेप्टिडर्जिक synaptic vesicles के axonal परिवहन के समय चूक इमेजिंग.ANF GFP, यूएएस ANF-GFP 21 के साथ टैग आलिंद नैट्रियूरेटिक पेप्टाइड चूहा, पूर्व संध्या RRA-Gal4 चालक 22 का उपयोग कर विशिष्ट motoneurons भीतर व्यक्त की गई थी. कमानी नसों का लाइव इमेजिंग axons में पेप्टिडर्जिक पुटिका लेबल ANF-GFP की तेजी से परिवहन का पता चलता है. इसके अलावा फिल्म S1 देखें. लाइव समय चूक इमेजिंग से motoneuron axons की (ए) एकल फ्रेम. हरे, लाल और नीले तीर अग्रगामी के उदाहरण, स्थिर और प्रतिगामी पुटिका से संकेत मिलता है, क्रमशः. स्केल बार = 5 माइक्रोन. (ए ') फिल्म से व्यक्तिगत समय फ्रेम ImageJ का उपयोग विलय कर दिया गया. (बी) ANF-GFP परिवहन के समय चूक इमेजिंग से उत्पन्न kymograph, के एक मिनट फैले एकल फ्रेम के एक संग्रह से उत्पन्न किया गया kymographs में खंडों निशान की ढलानों से गणना की गई है, जो औसतन कमानी वेग के ImageJ 23 के लिए 'एकाधिक kymograph' प्लग का उपयोग इमेजिंग समय. (सी) मात्रा,. presen हरे रंग की पट्टीटीएस अग्रगामी कमानी वेग (एन = 543) और नीली पट्टी 10 kymographs से vesicles के प्रतिगामी कमानी वेग (एन = 548) प्रस्तुत करता है. कण घनत्व (डी) मात्रा. कण घनत्व (हरे रंग की पट्टी में दिखाया गया है) अग्रगामी की संख्या, 10 kymographs से अक्षतंतु लंबाई की 100 माइक्रोन प्रति स्थिर (लाल पट्टी में दिखाया गया है) और (नीली पट्टी में दिखाया गया है) प्रतिगामी कणों द्वारा मापा गया था. इस आंकड़े में डेटा भी एट अल Ghannad-Rezaie में पहले से प्रकाशित किए गए थे, एक PLoS 7 (1), e29869, DOI:. 0.1371/journal.pone.0029869 (2012).

चित्रा 5. लेजर microsurgery और कैल्शियम इमेजिंग के लिए लार्वा चिप का प्रयोग करें.
एक चतुर्थ श्रेणी संवेदी न्यूरॉन से एक dendrite एक स्पंदित यूवी डाई लेजर से उच्च स्तरीय लेजर दालों के साथ द्वारा transected है. Microsurgery के लिए इस विधि का इस्तेमाल के लिए प्रोटोकॉल कहीं 16 पाया जा सकता है. लार्वा चिप में प्रभावी स्थिरीकरण रहते इमेजिंग द्वारा अध्ययन किया जा intracellular कैल्शियम के स्तर में तेजी से परिवर्तन के लिए अनुमति देता है. इस उदाहरण में, आनुवंशिक रूप से इनकोडिंग कैल्शियम सूचक GCaMP3.0 PPK-Gal4 ड्राइवर का उपयोग कर चतुर्थ श्रेणी वृक्ष के समान द्रुमायण (C4da) संवेदी न्यूरॉन्स में व्यक्त की गई थी. GCaMP3.0 तीव्रता के (ए) समय चूक छवियों रंग के अनुसार रंग झूठे थे समय के साथ तीव्रता में परिवर्तन का संकेत करने के लिए तीव्रता पैमाने. व्यक्तिगत फ्रेम 5 फ्रेम / सेकंड में एक कताई डिस्क confocal खुर्दबीन पर imaged एक फिल्म समय चूक (मूवी S2) से निकाले गए थे. कैल्शियम गतिशीलता (बी) मात्रा लेजर microsurgery के जवाब में. व्यक्तिगत न्यूरॉन्स की सोमा GCaMP3.0 प्रतिदीप्ति तीव्रता (ΔF/F0) की सामान्यीकृत गुना परिवर्तन (ग्रे में दिखाया गया है, N = 7) समय के खिलाफ साजिश रची गई थी. औसतन ΔF/F0 नारंगी में प्रतिनिधित्व किया था. GCaMP3.0 तीव्रता के शिखर वृद्धि की चोट के बाद 1-2 सेकंड के बीच मनाया गया. पृष्ठभूमि कच्चे जी CaMP3.0 प्रतिदीप्ति तीव्रता से घटाया गया था. इस आंकड़े में डेटा भी एट अल Ghannad-Rezaie में पहले से प्रकाशित किए गए थे, (2012) एक PLoS 7 (1):. e29869. Doi: 10.1371/journal.pone.0029869 12.

लार्वा चिप का उपयोग चित्रा 6. इमेजिंग axonal अंकुरण और अध: पतन. समीपस्थ स्टंप (बाएं) और तंत्रिका कुचलने के बाद अलग अलग समय बिंदुओं पर octopaminergic motoneuron axons के बाहर का स्टंप (दाएं) के प्रतिनिधि confocal छवियों. चित्रा -3 सी के रूप में दिखाया छवियाँ समान स्थानों पर ले जाया गया. इन न्यूरॉन्स टीडीसी का उपयोग कर एक यूएएस mCD8-आरएफपी transgene की अभिव्यक्ति ड्राइविंग द्वारा चिह्नित कर रहे हैं2-Gal4 चालक 24,25. इन न्यूरॉन्स के लिए सेल शरीर उदर तंत्रिका कॉर्ड 24 में झूठ बोलते हैं. तीन व्यक्ति axons एक एकल कमानी तंत्रिका के भीतर देखा जा सकता है और आसानी से एक दूसरे से हल कर रहे हैं. इस तरह के इन न्यूरॉन्स के लिए 15 घंटे के भीतर पूरा हो गया है जो degenerating axons के विखंडन के रूप में व्यक्तिगत सेलुलर घटनाओं के अध्ययन के लिए एक आदर्श स्थिति है. छवियाँ एक कताई डिस्क confocal खुर्दबीन पर 63X बढ़ाई लार्वा चिप का इस्तेमाल जीवित पशुओं से प्राप्त किया गया. स्केल सलाखों सही पैनल (बाहर का स्टंप) के लिए 10 बाईं पैनल के लिए माइक्रोन (समीपस्थ स्टंप) और 20 माइक्रोन =. बड़ी छवि को देखने के लिए यहां क्लिक करें.

चित्रा 7. लार्वा का प्रयोगजीवित पशुओं में लंबे समय और दूरी पर photoconverted फ्लोरोसेंट प्रोटीन को ट्रैक करने के लिए चिप.
इस उदाहरण में, ट्यूबिलिन α के लिए जुड़े हुए photoconvertible फ्लोरोसेंट प्रोटीन Dendra2 19, के एक संलयन प्रोटीन, PPK-Gal4 ड्राइवर का उपयोग कर, चतुर्थ श्रेणी वृक्ष के समान द्रुमायण (C4da) संवेदी न्यूरॉन्स में एक यूएएस Dendra2-α-ट्यूबिलिन transgene से व्यक्त किया जाता है photoconversion प्रयोग के लिए 26. (ए) योजनाबद्ध. C4da न्यूरॉन्स सेल निकायों परिधि में झूठ और तंत्रिका की हड्डी में synaptic टर्मिनलों के लिए फार्म कमानी नसों के माध्यम से axons का विस्तार. पशु के पीछे छमाही में सेल शरीर के एक सबसेट भीतर Dendra2-α-ट्यूबिलिन पारा दीपक (बाएं कार्टून) के साथ एक मानक DAPI फिल्टर का उपयोग 6 सेकंड के लिए यूवी रोशनी से photoconversion के अधीन है. समय के बाद, photoconverted Dendra2-α-ट्यूबिलिन उदर तंत्रिका कॉर्ड में synaptic टर्मिनलों पर पता लगाया जा सकता है. इस ट्यूबिलिन प्रोटीन ट्रॅन गया है कि इंगित करता है(~ 1-2 मिमी) एक लंबी दूरी पर रखा. एक चतुर्थ श्रेणी संवेदी न्यूरॉन सेल शरीर में Dendra2-α-ट्यूबिलिन के पैमाने बार = 1 मिमी (बी) उदाहरण छवियों से पहले और photoconversion के बाद. स्केल बार = 5 माइक्रोन. (सी) सेल शरीर के photoconversion के बाद 0 घंटे या 48 घंटे में या तो चतुर्थ श्रेणी संवेदी न्यूरॉन्स के लिए synaptic टर्मिनलों के उदाहरण छवियों. समय के बाद synaptic टर्मिनलों पर photoconverted Dendra2-α-ट्यूबिलिन की विशिष्ट उपस्थिति प्रोटीन अक्षतंतु टर्मिनस तक सेल शरीर से कूच कि निकलता है. सभी समय बिंदुओं पर photoconversion और इमेजिंग लार्वा चिप में आयोजित किया गया. स्केल बार = 15 माइक्रोन. बड़ी छवि को देखने के लिए यहां क्लिक करें.
मूवी S1. लेजर microsurgery और एक C4da न्यूरॉन की कैल्शियम इमेजिंग. एक स्पंदित यूवी लेजर एक रस्मी आड़ा काट करने के लिए इस्तेमाल किया गया थाआरे वृक्ष के समान शाखा. लेजर transection चोट के स्थल पर शुरू हुआ और सेल शरीर के लिए कूच जो GCaMP तीव्रता में तेजी से वृद्धि हुई है, प्रेरित किया. यूएएस GCaMP3.0 18 C4da विशिष्ट PPK-Gal4 चालक 26 का उपयोग करते हुए व्यक्त की गई थी. सिनेमा GCaMP3.0 के रिश्तेदार तीव्रता के स्तर इंगित करने के लिए रंग का झूठा थे. समय चूक इमेजिंग / सेक 5 तख्ते पर कताई डिस्क confocal माइक्रोस्कोपी के साथ आयोजित किया गया.
मूवी S2. motoneurons में ANF-GFP की फास्ट axonal परिवहन.
ANF GFP, यूएएस ANF-GFP 21, के साथ टैग चूहे एट्रियल नैट्रियूरेटिक पेप्टाइड पूर्व संध्या RRA-Gal4 चालक 22 का उपयोग कर विशिष्ट motoneurons भीतर व्यक्त की गई थी. लार्वा कमानी नसों के भीतर इन पेप्टिडर्जिक vesicles के परिवहन एक कताई डिस्क confocal खुर्दबीन का उपयोग कर 300 मिसे / फ्रेम में लार्वा चिप पर उतारी थी.
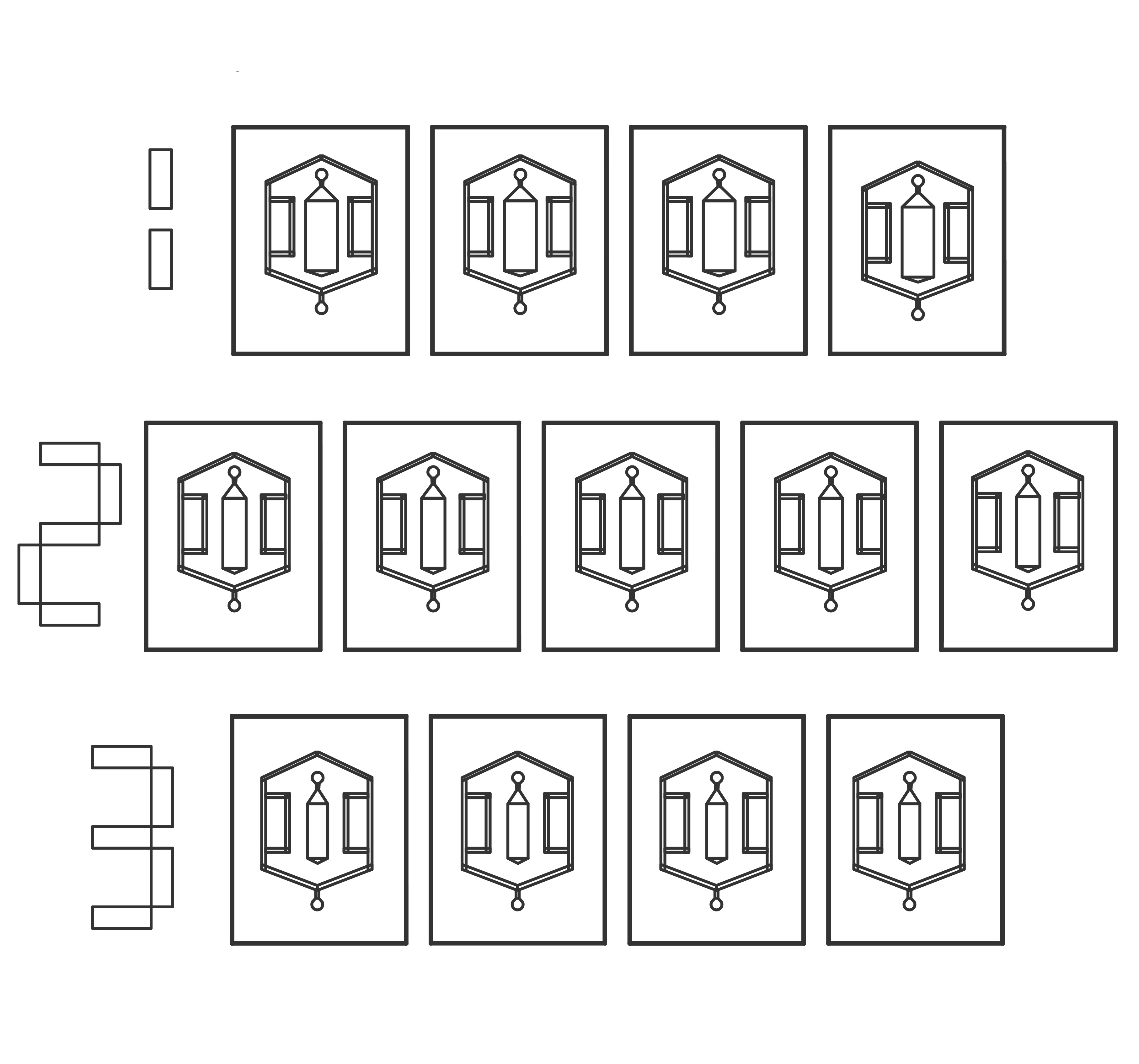
अनुपूरक Figure1 (DXF फ़ाइल)
सिलिकॉन मोल्ड निर्माण के लिए DXF फ़ाइल. फाइल एक 4 इंच सिलिकॉन वेफर पर नकारात्मक photoresist मुखौटा (SU-8 के लिए अंधेरे दायर मुखौटा) के लिए बनाया गया है. दूसरी पंक्ति में इस प्रोटोकॉल में प्रयोग किया जाता लार्वा चिप्स बनाने के लिए 5 नए नए साँचे में शामिल है. इन चिप्स (पंक्ति 2 में) में से प्रत्येक एक प्रारंभिक चरण 3 instar लार्वा के लायक बनाया एक ~ 5.4 मिमी x 1.5 मिमी कक्ष होते हैं. तीसरी पंक्ति (पंक्ति 3) एक छोटे कक्ष (~ 4.4mm x 1.5mm) होता है, जबकि पहली पंक्ति (पंक्ति 1), एक बड़े कक्ष (~ 5.4 मिमी x 2 मिमी) शामिल हैं. ये क्रमशः, बड़े और छोटे आकार के लार्वा के साथ उपयोग किया जा सकता है. = 2 मिमी स्केल बार.
Discussion
बनाना या लार्वा चिप प्राप्त:
लार्वा चिप एक गिलास coverslip से जुड़ी एक PDMS ब्लॉक ('PDMS चिप' कहा जाता है) के होते हैं. चरण 1 में प्रोटोकॉल बनाने और लार्वा चिप्स का उपयोग कर, एक SU-8 ढालना उपलब्ध है संभालने के लिए प्रक्रिया का वर्णन है. SU-8 ढालना photolithographically (विवरण Ghannad-Rezaie एट अल. 12 देखने के लिए) एक सिलिकॉन वेफर पर एक 140 माइक्रोन मोटी SU-8 photoresist परत patterning द्वारा microfabricated है. SU-8 मोल्ड के microfabrication विशेष उपकरणों का उपयोग करने की आवश्यकता है, हम एक microfabrication सुविधा से यह आदेश देने की सलाह देते हैं (उदाहरण के लिए. मिशिगन 14 विश्वविद्यालय में LNF सुविधा), या उन्हें प्रदान की जाती है कि चिप डिजाइन भेजकर एक फाउंड्री से एक अनुपूरक फ़ाइल के रूप में. एक (विभिन्न आकार के लार्वा के साथ प्रयोग के लिए जैसे) PDMS चिप डिजाइन, DXF फ़ाइलों (जैसे ऑटोकैड) संभालती है कि एक सीएडी सॉफ्टवेयर बदलने के लिए चाहता है में इस्तेमाल किया जा सकता है. एक एसयू8 ढालना भी मंडल में निर्देशों का पालन घर में बनाया जा सकता है एट अल. 27 कई पाठकों के लिए यह सुविधाजनक बस अपने स्वयं के चिप्स fabricating से पहले तकनीक बाहर की कोशिश करने के लिए एक नमूना PDMS चिप प्राप्त करने के लिए मिल सकता है. इस अनुरोध पर स्वतंत्र रूप से उपलब्ध कराया जाएगा.
लाइव इमेजिंग के लिए microfluidic 'लार्वा' चिप का प्रयोग करें:
लार्वा चिप में स्थिरीकरण विधि anesthetics के प्रयोग से बचा जाता है, और बदले जानवर के आंदोलन को प्रतिबंधित करने के लिए, एक वैक्यूम के आवेदन के माध्यम से, दबाव शामिल है. जानवरों के लिए कई घंटे 12, एक छोटी स्थिरीकरण अवधि (5-15 मिनट) के लिए चिप में स्थिरीकरण जीवित रह सकते हैं सिफारिश की है. इस intracellular कैल्शियम में परिवर्तन, या तेजी axonal परिवहन सहित हित के कई सेलुलर घटनाओं, इमेजिंग के लिए पर्याप्त समय है. यह भी इस तरह के लेजर आधारित microsurgery, photobleaching, और photoconver के रूप में जीवित पशुओं में वांछित जोड़तोड़, के लिए पर्याप्त समय हैसायन.
Longitudinally एक भी पशु में एक लंबे समय अवधि से अधिक घटनाओं का अध्ययन करने के लिए, जानवरों आराम की अवधि के द्वारा अलग, कई बार चिप में रखा जाता है और imaged किया जा सकता है. वे एक आसान खाद्य स्रोत और नमी प्रदान के रूप में अंगूर का रस अगर प्लेटें, इमेजिंग सत्र के बीच में आराम के लिए आदर्श होते हैं. प्रत्येक सत्र (नीचे, समस्या निवारण में भाग 2 देखें) जानवर को नुकसान पहुँचाए के लिए कुछ जोखिम वहन करती है के बाद से कई इमेजिंग सत्र, एक हद तक लार्वा अस्तित्व को प्रभावित करते हैं. पशु नियमित रूप से एक 50% से अधिक जीवित रहने की दर के साथ दो दिनों के दौरान अधिक> 5 बार imaged किया जा सकता है. जानवरों anesthetized नहीं कर रहे हैं, वे तुरंत चिप में वैक्यूम की रिहाई के बाद स्वस्थ और गतिशील होते हैं. वहाँ इमेजिंग सत्र के बीच वसूली समय के लिए कोई ज़रूरत इसलिए है, तो सत्र के बीच के समय में अंतर रखने लचीला है और प्रयोग के उद्देश्यों को समायोजित किया जा सकता है.
समस्या निवारण:
सबसे आम तकनीकी हैलार्वा चिप और सिफारिश समाधान अनुसरण कर रहे हैं के साथ मुद्दों:
(1) पशु भी ज्यादा बढ़ रहा है. बहुत ज्यादा गतिशीलता इमेजिंग लक्ष्यों के साथ हस्तक्षेप कर सकते हैं. लार्वा चिप में इस बात के लिए सबसे सामान्य कारणों में से एक) पशु चिप के लिए बहुत छोटा है, या ख) स्थिरीकरण चरण के दौरान लागू वैक्यूम दबाव के साथ छेड़छाड़ की है. जल्दी 3 instar लार्वा मंचन के लिए इस प्रोटोकॉल में वर्णित लार्वा चिप बनाया गया है. पशुओं के लिए अधिकतम आकार (अग्रपश्चस्थ अक्ष के साथ) की लंबाई में 3.5-4 मिमी है. प्रतिरोध संभाल में महसूस किया है जब तक वैक्यूम दबाव पर्याप्त है कि यह सुनिश्चित करने के लिए, सिरिंज 2-2.5 मिलीलीटर खींच, या. वैक्यूम काम कर रहा है कि एक संकेत परिधि चैनल में छोटे बुलबुले वैक्यूम स्रोत की ओर धीरे - धीरे बढ़ देखा जा सकता है. एक और संकेत चिप (ऊपर से उठाया है जब coverslip हमेशा चिप के साथ यात्रा करना चाहिए और इस कक्ष के परिवहन के लिए अनुशंसित विधि हैलार्वा तैनात है और निर्वात) पर है एक बार. ट्यूबिंग में दरारें हैं, तो वैक्यूम समझौता किया जा सकता है, या तेल ट्यूबिंग में अगर वहाँ. यह आसानी से (कदम 1.6-1.14 से) सुई टिप और पॉलीथीन-50 ट्यूबिंग वितरण 23 ग्राम की जगह से संबोधित किया जा सकता है.
(2) पशु चिप में इमेजिंग के बाद मर जाता है. प्रक्रिया जानवर पर कम से कम तनाव पैदा करने का इरादा है, और जंगली प्रकार जीनोटाइप के जानवरों के भी चिप 12 स्थिरीकरण के एक घंटे के बाद, एक> 90% जीवित रहने की दर है है. कुछ जीनोटाइप चिप का तनाव कम करने के लिए लचीला हो सकता है, के बाद से पहली बार जंगली जानवरों (उदाहरण के लिए, एस गुआंगज़ौ) स्थिरीकरण तकनीक जीवित रहते हैं कि जांच ले. एक) मारक के लिए सबसे आम कारण लार्वा की गलत स्थिति (आंकड़े 2 जी एच देखें) है. छल्ली, सिर या ट्रेकिआ के कुछ हिस्सों कक्ष के भीतर पूरी तरह से नहीं कर रहे हैं, तो वे स्थिरीकरण के दौरान क्षतिग्रस्त हो गया है, और एक कर सकते हैंचिप (> 4 मिमी) के लिए बहुत बड़ी है कि लार्वा जीवित रहने की संभावना कम होती है. ख) मारक के लिए एक कम आम कारण बहुत अधिक दबाव या वैक्यूम चिप लोड करते समय का उपयोग है. ठीक से चिप में तैनात है, जब निर्वात द्वारा उत्पन्न दबाव अच्छी तरह से सहन किया है. हालांकि वैक्यूम से या जानवर को स्थिति के प्रारंभिक चरण में या तो अत्यधिक दबाव, एक मुद्दा हो सकता है. यह सही आकार की जंगली प्रकार लार्वा के साथ परीक्षण से empirically जरूरत दबाव की डिग्री सीखने के लिए सबसे अच्छा है. बहुत ज्यादा हेलोकार्बन तेल जानवर की श्वासनली को शामिल किया गया, तो सी) पशु संभावित लंबे समय तक जीवित रहने के साथ मुद्दों हो सकता है. यह निर्वात की रचना, इमेजिंग दौरान प्रकाशिकी के लिए महत्वपूर्ण है, और यह चिप में सुखाना counteracts: तेल चिप में कई महत्वपूर्ण भूमिका निभाता है. हालांकि अत्यधिक तेल से बचा जाना चाहिए. (यह भी वैक्यूम समझौता किए, ट्यूबिंग और सिरिंज में तेल के लिए नेतृत्व कर सकते हैं). तेल के साथ लार्वा का सिर्फ उदर पक्ष सुझाव दिया प्रोटोकॉल कोट, फिर rइमेजिंग के लिए अंतिम coverslip करने के लिए स्थानांतरित करने से पहले एक साफ coverslip पर लार्वा की नियुक्ति से अतिरिक्त तेल emoves. घ) phototoxicity इमेजिंग सत्र से अनुभव किया जा सकता है. किसी भी जीवित इमेजिंग आवेदन के साथ के रूप में, यह सबसे अच्छा है एक बेहद संवेदनशील कैमरा या डिटेक्टर का उपयोग कर हासिल की है जो कम तीव्रता लेजर प्रकाश, के साथ कम जोखिम बार उपयोग करने के लिए आदर्श है. पारा प्रकाश स्रोतों के द्वारा बनाई गई व्यापक स्पेक्ट्रम प्रकाश सहित, यूवी प्रकाश के साथ रोशनी कम करने की कोशिश.
अन्य मुद्दों और भविष्य दिशाओं:
इस विधि निश्चेतक का उपयोग नहीं करता है, जानवर के दिल की धड़कन बना हुआ है. यह और अधिक दूसरों की तुलना में कुछ स्थानों में इमेजिंग को प्रभावित करता है, जो कुछ अपरिहार्य गतिशीलता, बनाता है. यहाँ उदाहरण उदर तंत्रिका कॉर्ड, कमानी नसों, और शरीर दीवार आसानी से दिल की धड़कन से हस्तक्षेप के बिना imaged किया जा सकता है कि प्रदर्शित करता है. दिल की धड़कन इमेजिंग को प्रभावित करता है, जहां मामलों में, नियमित आंदोलनों कभी कभी के साथ के लिए सही किया जा सकता हैविश्लेषण सॉफ्टवेयर में (उदाहरण के लिए, ImageJ के लिए छवि स्थिरता प्लगइन). व्यक्ति वस्तुओं (घंटे मिनट) एक तेजी से समय पैमाने (तेज axonal परिवहन के लिए उदाहरण के लिए ~ 1 माइक्रोन / सेक) पर या एक बहुत ही धीमी गति से समय स्केल पर आगे बढ़ रहे हैं जब यह अच्छी तरह से काम करता है. हालांकि, जब वस्तु (एस) गति और दिशाओं की एक सीमा के साथ ब्याज के, यह दिल की धड़कन प्रेरित आंदोलनों के लिए सही करने के लिए कठिन हो सकता है.
एक और मुद्दा जानवर से जानवर के लिए, या चिप में एक ही पशु के कई इमेजिंग सत्र के बीच प्रकाशिकी में मामूली परिवर्तनशीलता है. गहरी रुचि की वस्तु जानवर के भीतर है, अधिक से अधिक इस बदलाव हो जाएगा. कमानी नसों और उदर तंत्रिका कॉर्ड भी गहरी एक नियमित माइक्रोस्कोप पर imaged किया जा तो जानवर के भीतर सामान्य रूप से कर रहे हैं. बहरहाल लार्वा चिप में अनुभवी हल्के दबाव के बहुत करीब छल्ली और coverslip करने के लिए इन संरचनाओं धक्का. coverslip से इन संरचनाओं की सही दूरी टीआर से छोटे बदलाव होगापरीक्षण करने के लिए ial. वस्तुओं के लिए परिवर्तन ऐसे संवेदी न्यूरॉन्स सेल निकायों के रूप में, छल्ली बंद, कम है. यह प्रकाशिकी में परिवर्तनशीलता के लिए खाते में जानवरों और स्वतंत्र परीक्षणों की एक बड़ी संख्या का उपयोग करने के लिए, विशेष रूप से तीव्रता की माप बनाने के लिए, इसलिए यह महत्वपूर्ण है.
यहाँ दिखाए गए उदाहरण न्यूरॉन्स के भीतर प्रक्रियाओं पर ध्यान केंद्रित किया है, दृष्टिकोण खुर्दबीन उद्देश्य का ध्यान केंद्रित गहराई में लाया जा सकता है कि पशुओं में किसी भी संरचना इमेजिंग के लिए उत्तरदायी होना चाहिए. इस छल्ली, शरीर दीवार मांसपेशियों, और उनके NMJs शामिल हैं. पशु के उदर पक्ष पर ट्रेकिआ और संभवतः पाचन तंत्र के कुछ हिस्सों में भी imaged किया जा सकता है. जानवर भी पृष्ठीय सतह के पास संरचनाओं के लघु अवधि के इमेजिंग के लिए coverslip प्रति अपनी पृष्ठीय पक्ष के साथ तैनात किया जा सकता है. गहरे जानवर के भीतर छवि संरचनाओं करने की क्षमता का इस्तेमाल किया खुर्दबीन उद्देश्य के काम दूरी तक सीमित है. ऐसे im के रूप में संरचनाएंaginal डिस्क उच्च वृद्धि (जैसे 40x) उद्देश्यों के लिए दुर्गम हैं.
इस प्रोटोकॉल में वर्णित लार्वा चिप्स (3.5-4 मिमी से आकार में लेकर) जल्दी 3 instar चरण में लार्वा के लिए तैयार कर रहे हैं. हालांकि कई दिलचस्प सवालों अलग लार्वा चरणों में इमेजिंग की आवश्यकता होती है. देर से 3 instars समायोजित करने के लिए 2 एन डी instar लार्वा, या बड़ा चिप्स को समायोजित करने के लिए छोटे चिप्स आसानी से एक ही सिद्धांत का उपयोग कर बनाया जा सकता है. (अनुपूरक चित्रा 1 बदल कक्ष आकार के साथ सिलिकॉन molds बनाने के लिए एक आसानी से परिवर्तनीय DXF फ़ाइल शामिल हैं). प्रतिवर्ती मुहर के सरल सिद्धांत भी ऐसे सी के रूप में अन्य जीवों के लिए लागू किया जा सकता है मुख्य संस्करण कक्ष आकार होने के साथ एलिगेंस या zebrafish,. एक उपयोगी भविष्य की दिशा स्क्रीनिंग प्रयोजनों के लिए उपयोग करने के लिए एक ही बार में कई जानवरों को स्थिर कर सकते हैं कि एक चिप डिजाइन करने के लिए है. हालांकि, इसके लिए डिजाइन काफी अलग होने की आवश्यकता होगीचिप में जानवर को स्थिति के मुद्दों पर स्वतंत्र रूप से एक पशु के लिए के साथ निपटा जाना चाहिए जहां वर्तमान डिवाइस, से.
लार्वा परिधीय नसों में चोट प्रतिक्रियाओं का अध्ययन के लिए तंत्रिका कुचलने परख:
लार्वा कमानी नसों के लिए यहाँ वर्णित तंत्रिका कुचलने परख ड्रोसोफिला में परिधीय axons के लिए एक चोट शुरू करने के लिए एक सरल तरीका है. इस विधि के लाभ में शामिल हैं: एक) यह एक ड्रोसोफिला प्रयोगशाला (एक stereomicroscope सीओ 2 स्रोत और संदंश) में पाया मानक उपकरण के साथ संचालन करने के लिए सरल है, ख) यह चोट के बाद तंत्रिका डोरियों के जैव रासायनिक विश्लेषण कर रही है, कई जानवरों के लिए जल्दी से आयोजित किया जा सकता है 14 व्यवहार्य, ग) इस चोट के आणविक और सेलुलर प्रतिक्रियाओं 14,15,28 अत्यधिक प्रतिलिपि प्रस्तुत करने योग्य हैं और हड्डीवाला न्यूरॉन्स 29,30 में भी महत्वपूर्ण हैं कि प्रक्रियाओं की खोज करने के लिए इस्तेमाल किया जा सकता है.
न्यूरॉन्स घायल करने के वैकल्पिक तरीके केंद्रित करने के लिए हैसा उच्च शक्ति लेजर, उदाहरण के लिए लेजर microsurgery 17,31-33 के माध्यम से एक अक्षतंतु तोड़ एक स्पंदित यूवी या femtosecond लेजर,. लार्वा चिप ऐसे microsurgery के लिए पशु स्थिति के लिए एक आदर्श तरीका है. हालांकि, क्योंकि ऊपर चर्चा परीक्षणों के बीच प्रकाशिकी, में मामूली अंतर से, लेजर आधारित पद्धति विशेष रूप से लार्वा कमानी नसों में, लार्वा में पुन: पेश करने के लिए और अधिक कठिन हो सकता है. इसके अलावा, लेजर आधारित axonal चोट, प्रत्येक जानवर की स्थिति के लिए और अधिक समय की आवश्यकता है, इसलिए (जानवरों की एक बड़ी संख्या के साथ) एक बड़े पैमाने पर संचालन करने के लिए और अधिक कठिन है.
समस्या निवारण:
तंत्रिका कुचलने से सबसे अधिक सामना करना पड़ा तकनीकी समस्या के आंतरिक अंगों को नुकसान से मौत है. कुचलने का आयोजन करते हैं, तो यह उदर तंत्रिका कॉर्ड, लार ग्रंथियों, या आंतों चुटकी महत्वपूर्ण नहीं है. यह छल्ली पंचर नहीं भी महत्वपूर्ण है. इन मुद्दों को सबसे अच्छा छल्ली surfac के लिए एक 45 डिग्री के कोण पर संदंश लाकर परहेज कर रहे हैंई (चित्रा 3 देखें).
संदंश की गुणवत्ता बाद में कुचलने और अस्तित्व की प्रभावशीलता पर एक बड़ा प्रभाव पड़ता है. हम Dumostar संख्या 5 संदंश की सलाह देते हैं. उनके तीखेपन को बनाए रखने के लिए, संदंश, ध्यान से संभाला अन्य प्रयोजनों के लिए उपयोग नहीं किया, और वे कुंद या तुला बन एक बार बदला जाना चाहिए.
जानवर के आकार को भी कुचलने की प्रभावशीलता को प्रभावित कर सकते हैं. छोटे जानवरों (लंबाई में कम से कम 3 मिमी) बहुत कम संभावना चोट जीवित रहने के लिए कर रहे हैं. बड़े जानवरों के साथ, (3 instars भटक), यह नसों लगाने और बड़ा लार ग्रंथियों और आंतों को नुकसान से बचने के लिए और अधिक कठिन है, और पोटा बनना से पहले चोट प्रतिक्रियाओं का अध्ययन करने के लिए कम समय है. तंत्रिका को कुचलने के सबसे प्रभावी रूप से जल्दी 3 instar लार्वा में आयोजित किया जाता है (जो कर रहे हैं ~ अग्रपश्चस्थ अक्ष के साथ लंबाई में 3-4.5 मिमी).
पशु पर उठाया है कि खाद्य स्रोत को प्रभावित कर सकताकुचलने के बाद छल्ली और अस्तित्व की ताकत. यह एक मानक खमीर ग्लूकोज नुस्खा से बना भोजन में पशुओं को उठाने की सिफारिश की है.
प्रभावी ढंग से कुचलने करने के लिए सीखने के लिए सबसे अच्छा तरीका पहले प्राथमिक अस्तित्व को प्राप्त करने का लक्ष्य (और नहीं प्यूपीकरण) कुचलने के बाद 24 घंटे के साथ, कई जानवरों पर अभ्यास करने के लिए है. शुरुआती सामान्य रूप से एक कम जीवित रहने की दर (जैसे 10%) है, लेकिन तकनीक सीखा है एक बार, जीवित रहने की दरों ~ 90% तक पहुँच सकते हैं.
अन्य मुद्दों और भविष्य दिशाओं:
क्रश परख चोट साइट और axons और चोट साइट के लिए बाहर का synapses के अध: पतन के लिए अक्षतंतु समीपस्थ का अंकुरण अध्ययन करने के लिए एक शक्तिशाली तरीका प्रदान करता है. अध: पतन की दरें अलग न्यूरॉन प्रकार के बीच में भिन्नता है, वे चोट परख के reproducibility के लिए आदेश प्रदान करने, एक दिया न्यूरॉन प्रकार के भीतर अत्यधिक प्रतिलिपि प्रस्तुत करने योग्य हैं.
इसके विपरीत, 'पुनर्योजी' अंकुरणसमीपस्थ axons में मनाया प्रतिक्रिया का अध्ययन करने के लिए और अधिक चुनौतीपूर्ण है. कमानी तंत्रिका में सभी axons (उदाहरण के लिए, चित्रा 6 और चित्रा 3 देखें) चोट स्थल के करीब अंकुरण व्यापक आरंभ. हालांकि अंकुरण की हद न्यूरॉन से न्यूरॉन करने के लिए अलग अलग है, और जिसका अंदाजा लगाना मुश्किल है सकते हैं. अंकुरण में इसी तरह की डिग्री और परिवर्तनशीलता एक यूवी स्पंदित डाई लेजर का उपयोग करके शुरू की कमानी नसों में एकल motoneurons के अधिक फोकल घावों के बाद देखा जा सकता है. हम अंकुरण की nondiscriminate दिशात्मकता कमानी नसों में मार्गदर्शन संकेत के अभाव के कारण है कि व्याख्या. इसके विपरीत, उनके पास सेल शरीर को लेजर से घायल संवेदी न्यूरॉन अक्षतंतु खो अक्षतंतु 34 के रूप में एक ही दिशा में नई axonal विकास से गुजरना. जानवर के इस क्षेत्र में axons संभावना regenerating axons के मार्गदर्शन के लिए और अधिक विशिष्ट स्थितीय जानकारी के संपर्क में हैं. कमानी नसों के भीतर वातावरण बहुत resemblan है की संभावना नहीं हैमूल रूप से भ्रूण में उनके मार्गदर्शन दौरान navigated axons, इसलिए regenerating axons गाइड करने के लिए जानकारी की उम्मीद नहीं है कि पर्यावरण के लिए CE.
कमानी तंत्रिका कुचलने परख का उपयोग उत्थान के अध्ययन के लिए एक और सीमा घायल संवेदी और motoneuron axons अभी भी पशु undergoes से पहले अपने लक्ष्य तक पहुँचने के लिए (0.25-1 मिमी), और एक सीमित समय सीमा (<3 दिन) को कवर करने के लिए एक महत्वपूर्ण दूरी है प्यूपीकरण. एक ताजा अध्ययन में 3 instar लार्वा चरण 35 की अवधि ट्रिपल जो prothoraciotropic हार्मोन रिसेप्टर के एक आनुवंशिक हेरफेर की पहचान की है. इस हेरफेर 9 के बजाय 3 के दिनों में काफी चोट के बाद न्यूरॉन्स की वसूली और अध: पतन के अध्ययन के लिए समय सीमा का विस्तार होगा. इस चोट synaptic समाप्त होने के करीब प्रेरित है, खासकर अगर इस तरह अपने postsynaptic लक्ष्य के साथ एक घायल अक्षतंतु के कनेक्शन के रूप में नई घटनाओं, निरीक्षण करने के लिए काफी देर तक हो सकता है.
Disclosures
लेखक कोई प्रतिस्पर्धा वित्तीय हितों की घोषणा.
Acknowledgments
यह काम (सीएसी करने के द्वारा करने के लिए R00MH080599, नेकां के लिए R21 NS062313, और NS069844) के राष्ट्रीय विज्ञान फाउंडेशन (अनुदान संख्या सीएसी करने IOS-0842701), और स्वास्थ्य के राष्ट्रीय संस्थान द्वारा समर्थित किया गया. हम तकनीकी समर्थन के लिए जेम्स SCHUTT, एमिली हान, और लेनी Truong स्वीकार करना, और मक्खी लाइनों के लिए ब्लूमिंगटन स्टॉक केन्द्र होगा. सभी चिप्स मिशिगन विश्वविद्यालय में Lurie Nanofabrication सुविधा पर गढ़े गए थे.
Materials
| Name | Company | Catalog Number | Comments |
| 0.5 mm Polyethylene tubing | Fisher Scientific | 14-170-11B | Polyethylene tubing, I.D. = 0.023 in O.D. = 0.038 in |
| 1 mm Polyurethane tubing | Fisher Scientific | BB521-63 | Polyurethane tubing, I.D. = 0.063 in O.D. = 0.125 in |
| Barb to barb connector | Bio Rad | 732-8300 | 0.8 mm barb to barb connector |
| 3-way Stopcock valve | Bio Rad | 732-8104 | Screw on valve for the syringe |
| Syringe (20 ml) | Fisher Scientific | 14-817-33 | Screw on 20 ml syringe for generating vacuum |
| Dispensing needles, 23 G (0.4 mm I.D., 0.6 mm O.D.) | McMaster-Carr | 75165A684 | Needle for outlet connection |
| Dispensing needles, 21 G, (0.6 mm I.D., 0.8 mm O.D.) | McMaster-Carr | 75165A679 | Needle for outlet connection |
| Halocarbon oil | Sigma | H8898 | Halocarbon oil 700 |
| Dumostar Number 5 Forceps | Roboz | RS-498 | For nerve crush |
| PDMS Kit (Base and curing agent) | Ellsworth | 184 SIL ELAST KIT 0.5KG | Dow Corning Sylgard 184 Silicone Encapsulant 0.5 kg Kit Clear |
| Glass Coverslips | Fisher Scientific | 12-544-C | 24 mm x 40 mm (thickness according to recommendation for your microscope objective) |
| Disposable Plastic Cup (9 oz) | |||
| Plastic coffee stirrer stick | |||
| Razor Blade | |||
| Grape juice agar plates | See http://cshprotocols.cshlp.org/content/2007/4/pdb.rec10925 for recipe |
References
- Pilling, A. D., Horiuchi, D., Lively, C. M., Saxton, W. M. Kinesin-1 and Dynein are the primary motors for fast transport of mitochondria in Drosophila motor axons. Mol. Biol. Cell. 17, 2057-2068 (2006).
- Gunawardena, S., et al. Disruption of axonal transport by loss of huntingtin or expression of pathogenic polyQ proteins in Drosophila. Neuron. 40, 25-40 (2003).
- Miller, K. E., et al. Direct observation demonstrates that Liprin-alpha is required for trafficking of synaptic vesicles. Curr. Biol. 15, 684-689 (2005).
- Zito, K., Parnas, D., Fetter, R. D., Isacoff, E. Y., Goodman, C. S. Watching a synapse grow: noninvasive confocal imaging of synaptic growth in Drosophila. Neuron. 22, 719-729 (1999).
- Fuger, P., Behrends, L. B., Mertel, S., Sigrist, S. J., Rasse, T. M. Live imaging of synapse development and measuring protein dynamics using two-color fluorescence recovery after photo-bleaching at Drosophila synapses. Nat. Protoc. 2, 3285-3298 (2007).
- Schmid, A., et al. Activity-dependent site-specific changes of glutamate receptor composition in vivo. Nat. Neurosci. 11, 659-666 (2008).
- Fuentes-Medel, Y., et al. Glia and muscle sculpt neuromuscular arbors by engulfing destabilized synaptic boutons and shed presynaptic debris. PLoS Biol. 7, (2009).
- Andlauer, T. F., Sigrist, S. J. Building an imaging chamber for in vivo imaging of Drosophila larvae. , Cold Spring Harb. Protoc. 476-480 (2012).
- Sandstrom, D. J. Isoflurane reduces excitability of Drosophila larval motoneurons by activating a hyperpolarizing leak conductance. Anesthesiology. 108, 434-446 (2008).
- Sandstrom, D. J. Isoflurane depresses glutamate release by reducing neuronal excitability at the Drosophila neuromuscular junction. J. Physiol. 558, 489-502 (2004).
- Mondal, S., Ahlawat, S., Rau, K., Venkataraman, V., Koushika, S. P. Imaging in vivo neuronal transport in genetic model organisms using microfluidic devices. Traffic. 12, 372-385 (2011).
- Ghannad-Rezaie, M., Wang, X., Mishra, B., Collins, C., Chronis, N. Microfluidic chips for in vivo imaging of cellular responses to neural injury in Drosophila larvae. PloS one. 7, (2012).
- Schmid, A., Sigrist, S. J. Analysis of neuromuscular junctions: histology and in vivo imaging. Methods Mol. Biol. 420, 239-251 (2008).
- Xiong, X., et al. Protein turnover of the Wallenda/DLK kinase regulates a retrograde response to axonal injury. J Cell Biol. 191, 211-223 (2010).
- Xiong, X., Collins, C. A. A conditioning lesion protects axons from degeneration via the Wallenda/DLK MAP kinase signaling cascade. J. Neurosci. 32, 610-615 (2012).
- Byrne, A. B., Edwards, T. J., Hammarlund, M. In vivo Laser Axotomy in C. elegans. J. Vis. Exp. (51), (2011).
- Williams, W., Nix, P., Bastiani, M. Constructing a Low-budget Laser Axotomy System to Study Axon Regeneration in C. elegans. J. Vis. Exp. (57), (2011).
- Tian, L., et al. Imaging neural activity in worms, flies and mice with improved GCaMP calcium indicators. Nat. Methods. 6, 875-881 (2009).
- Chudakov, D. M., Lukyanov, S., Lukyanov, K. A. Tracking intracellular protein movements using photoswitchable fluorescent proteins PS-CFP2. 2, 2024-2032 (2007).
- Gurskaya, N. G., et al. Engineering of a monomeric green-to-red photoactivatable fluorescent protein induced by blue light. Nat. Biotechnol. 24, 461-465 (2006).
- Rao, S., Lang, C., Levitan, E. S., Deitcher, D. L. Visualization of neuropeptide expression, transport, and exocytosis in Drosophila melanogaster. J. Neurobiol. 49, 159-172 (2001).
- Fujioka, M., et al. Even-skipped, acting as a repressor, regulates axonal projections in Drosophila. Development. 130, 5385-5400 (2003).
- Rietdorf, J., Steitz, A., Heidelberg, E. Linear unmixing macro for ImageJ. European Advanced Light Microscopy Network. , (2004).
- Koon, A. C., et al. Autoregulatory and paracrine control of synaptic and behavioral plasticity by octopaminergic signaling. Nat. Neurosci. 14, 190-199 (2011).
- Yarali, A., Gerber, B. A Neurogenetic Dissociation between Punishment-, Reward-, and Relief-Learning in Drosophila. Front. Behav. Neurosci. 4, (2010).
- Kuo, C. T., Jan, L. Y., Jan, Y. N. Dendrite-specific remodeling of Drosophila sensory neurons requires matrix metalloproteases, ubiquitin-proteasome, and ecdysone signaling. Proc. Natl. Acad. Sci. U.S.A. 102, 15230-15235 (2005).
- Mondal, S., Ahlawat, S., Koushika, S. P. Simple Microfluidic Devices for in vivo Imaging of C. elegans, Drosophila. J. Vis. Exp. (67), (2012).
- Xiong, X., et al. The highwire ubiquitin ligase promotes axonal degeneration by tuning levels of nmnat protein. PLoS Biol. 10, (2012).
- Shin, J. E., et al. Dual leucine zipper kinase is required for retrograde injury signaling and axonal regeneration. Neuron. 74, 1015-1022 (2012).
- Watkins, T. A., et al. DLK initiates a transcriptional program that couples apoptotic and regenerative responses to axonal injury. Proc. Natl. Acad. Sci. U.S.A. 110, 4039-4044 (2013).
- Hammarlund, M., Nix, P., Hauth, L., Jorgensen, E. M., Bastiani, M. Axon regeneration requires a conserved MAP kinase pathway. Science. 323, 802-806 (2009).
- Guo, S. X., et al. Femtosecond laser nanoaxotomy lab-on-a-chip for in vivo nerve regeneration studies. Nat. Methods. 5, 531-533 (2008).
- O'Brien, G. S., Rieger, S., Martin, S. M., Cavanaugh, A. M., Portera-Cailliau, C., Sagasti, A. Two-photon axotomy and time-lapse confocal imaging in live zebrafish embryos. J. Vis. Exp. (24), (2009).
- Stone, M. C., Nguyen, M. M., Tao, J., Allender, D. L., Rolls, M. M. Global up-regulation of microtubule dynamics and polarity reversal during regeneration of an axon from a dendrite. Mol. Biol. Cell. 21, 767-777 (2010).
- Miller, D. L., Ballard, S. L., Ganetzky, B. Analysis of synaptic growth and function in Drosophila with an extended larval stage. J. Neurosci. 32, 13776-13786 (2012).

{kind=link}