

ERRATUM NOTICE
Important: There has been an erratum issued for this article. Read more …
Summary
यह प्रोटोकॉल रोबोटिक अल्ट्रासाउंड (यूएस) को पारंपरिक गैर-इनवेसिव छवि तौर-तरीकों के लिए एक व्यावहारिक, लागत प्रभावी और त्वरित विकल्प के रूप में प्रदर्शित करता है।
Abstract
कृन्तकों के विवो इमेजिंग में सामान्य तौर-तरीकों में पॉज़िट्रॉन एमिशन टोमोग्राफी (पीईटी), कंप्यूटेड टोमोग्राफी (सीटी), चुंबकीय अनुनाद इमेजिंग (एमआरआई), और अल्ट्रासाउंड (यूएस) शामिल हैं। प्रत्येक विधि की सीमाएं और फायदे हैं, जिनमें उपलब्धता, उपयोग में आसानी, लागत, आकार और आयनीकरण विकिरण या चुंबकीय क्षेत्र का उपयोग शामिल है। यह प्रोटोकॉल कृंतक गुर्दे और हृदय के विवो इमेजिंग, बाद के डेटा विश्लेषण और संभावित अनुसंधान अनुप्रयोगों के लिए 3 डी रोबोट यूएस के उपयोग का वर्णन करता है। रोबोट अमेरिका के व्यावहारिक अनुप्रयोग कुल गुर्दे की मात्रा (टीकेवी) के परिमाणीकरण के साथ-साथ अल्सर, ट्यूमर और वास्कुलचर के माप हैं। यद्यपि संकल्प अन्य तौर-तरीकों के रूप में उच्च नहीं है, रोबोट यूएस अधिक व्यावहारिक उच्च थ्रूपुट डेटा संग्रह के लिए अनुमति देता है। इसके अलावा, यूएस एम-मोड इमेजिंग का उपयोग करके, कार्डियक फ़ंक्शन को परिमाणित किया जा सकता है। चूंकि गुर्दे कार्डियक आउटपुट का 20% -25% प्राप्त करते हैं, इसलिए कार्डियक फ़ंक्शन का आकलन करना गुर्दे के शरीर विज्ञान और पैथोफिजियोलॉजी की समझ के लिए महत्वपूर्ण है।
Introduction
विवो कृंतक इमेजिंग के लिए सबसे आम तौर-तरीकों में पॉज़िट्रॉन एमिशन टोमोग्राफी (पीईटी), ऑप्टिकल इमेजिंग (ओआई), कंप्यूटेड टोमोग्राफी (सीटी), चुंबकीय अनुनाद इमेजिंग (एमआरआई), और अल्ट्रासाउंड (यूएस) शामिल हैं। ये तकनीकें विवो छवियों में उच्च-रिज़ॉल्यूशन प्रदान करती हैं, जिससे जांचकर्ताओं को मात्रात्मक रूप से मूल्यांकन करने और अनुदैर्ध्य रूप से रोग मॉडल का गैर-इनवेसिव रूप से पालन करने की अनुमति मिलती है। जबकि प्रत्येक इमेजिंग पद्धति की सीमाएं होती हैं, वे प्रीक्लिनिकल अनुसंधान के लिए अमूल्य उपकरण भी प्रदान करते हैं।
यहां, अध्ययन एक अमेरिकी प्रणाली का विवरण देता है और रोबोट और 3 डी कृंतक इमेजिंग के लिए प्रोटोकॉल प्रस्तुत करता है। अमेरिकी तरंगों को एक ट्रांसड्यूसर नामक एक जांच द्वारा उत्पादित किया जाता है, जो आमतौर पर हाथ से आयोजित किया जाता है। ध्वनि तरंगों को वापस परावर्तित किया जाता है क्योंकि वे ऊतकों के साथ बातचीत करते हैं, और प्रतिध्वनियों को छवियों में पुनर्निर्मित किया जाता है2। यहां वर्णित प्रोटोकॉल एक रोबोटिक रूप से नियंत्रित ट्रांसड्यूसर का उपयोग करके गुर्दे और कार्डियक इमेजिंग पर ध्यान केंद्रित करेगा और सॉफ्टवेयर का उपयोग करेगा जो मात्रात्मक मूल्यांकन के लिए तेजी से 3 डी पुनर्निर्माण की अनुमति देता है।
रोबोटिक यूएस एक तेज, विश्वसनीय और गैर-इनवेसिव इमेजिंग मोडलिटी है जो जांचकर्ताओं को उच्च-थ्रूपुट और अनुदैर्ध्य अध्ययन करने की अनुमति देता है। हाथ से आयोजित अमेरिकी तरीकों की तुलना में, रोबोटिक यूएस विधि समय-कुशल है, क्योंकि तीन जानवरों को मिनटों के मामले में स्कैन किया जा सकता है। गुर्दे के माप के लिए उच्च थ्रूपुट से पता चलता है कि प्रति घंटे 20 चूहों तक की छवि बनाई जा सकती है। रोबोट ट्रांसड्यूसर ध्वनिक झिल्ली के नीचे स्थित होते हैं और स्वतंत्रता के दो डिग्री (चित्रा 1 ए) के साथ जानवर से स्वतंत्र रूप से चलते हैं। यह नौसिखिए उपयोगकर्ताओं को उच्च गुणवत्ता वाली छवियों को प्राप्त करने की अनुमति देता है, जबकि हाथ से आयोजित अमेरिकी विधियां उपयोगकर्ता त्रुटि के लिए अधिक संवेदनशील होती हैं। युग्मित सॉफ़्टवेयर कुशल, वास्तविक समय 3 डी गुर्दे के पुनर्निर्माण की अनुमति देता है। इससे पहले, चुंबकीय अनुनाद इमेजिंग (एमआरआई) उत्कृष्ट नरम-ऊतक विपरीत, रेडियोधर्मिता की कमी और पैठ की गहराई के कारण गैर-इनवेसिव इमेजिंग के लिए एक प्रचलित विधि रही है। हालांकि, एमआरआई को अक्सर लंबे अधिग्रहण समय की आवश्यकता होती है और प्रदर्शन करना महंगा होता है। यूएस को कुल गुर्दे की मात्रा (टीकेवी) 3 का आकलन करने में एमआरआई के लिए एक विश्वसनीय और अधिक तेजी से विकल्प के रूप में मूल्यांकन किया गया है।
Protocol
इस प्रोटोकॉल में सभी कदम मेयो क्लिनिक (रोचेस्टर, एमएन) जानवरों के दिशानिर्देशों का उपयोग करते हैं और मेयो क्लिनिक संस्थागत पशु देखभाल और उपयोग समिति द्वारा अनुमोदित किए गए हैं।
1. पशु मॉडल
- वाणिज्यिक स्रोतों से चूहों को प्राप्त करें।
नोट: C57BL/6J (आयु = 18 महीने; n = 22 (7 पुरुष, 15 महिलाएं)) (सामग्री की तालिका) और Pkd1 (RC/RC) (आयु = 18 महीने; n = 9 (3 पुरुष, 6 महिलाएं)))4 का उपयोग अध्ययन के लिए किया गया था।
2. बालों को हटाने
- एक संज्ञाहरण कक्ष में वाष्पीकृत आइसोफ्लुरेन (2% -3%) का उपयोग करके जानवर को एनेस्थेटिकाइज़ करें। सुनिश्चित करें कि जानवर पर्याप्त रूप से एक पैर की अंगुली चुटकी प्रदर्शन करके anesthetized है। सुनिश्चित करें कि माउस स्पष्ट हवा के बिना लगभग 60-90 साँस / मिनट की दर से साँस ले रहा है।
नोट: वाष्पीकृत आइसोफ्लुरेन को जानवर के संज्ञाहरण के स्तर को नियंत्रित करने और ठीक करने की क्षमता के कारण चुना गया था। 100% ऑक्सीजन के साथ मिश्रित आइसोफ्लुरेन का उपयोग किया गया था। - अमेरिकी माप के लिए वांछित त्वचा क्षेत्र को शेव करने के लिए एक इलेक्ट्रिक रेजर का उपयोग करें।
नोट: इस अध्ययन में, ध्यान गुर्दे और हृदय माप पर है, इसलिए जानवर की छाती और पीठ को शेव किया गया था। - एक कपास इत्तला एप्लिकेटर के साथ जानवर की मुंडा त्वचा के लिए depilatory क्रीम लागू होते हैं। एक सूखे कागज तौलिया का उपयोग करके 30-60 सेकंड के बाद क्रीम को पोंछ लें। फिर, गीले धुंध पैड का उपयोग करके डिपिलेटरी क्रीम अवशेषों को पोंछना जारी रखें। सुनिश्चित करें कि बालों को हटाने स्कैन शुरू करने से पहले पूरा हो गया है।
नोट: किसी भी शेष बाल छवि की गुणवत्ता के साथ हस्तक्षेप करेंगे; पूर्ण बालों को हटाने महत्वपूर्ण है. हालांकि, जानवर की त्वचा को घायल करने से रोकने के लिए एक मिनट के भीतर डिपिलेटरी क्रीम को पोंछना आवश्यक है। जानवर पर बचा हुआ डिपिलेटरी क्रीम अमेरिकी मशीन की इमेजिंग झिल्ली को दाग सकता है। गीले धुंध पैड का उपयोग करके जानवर की उचित सफाई सुनिश्चित करें।
3. पशु स्थिति
- अमेरिकी मशीन और अमेरिकी बे के लिए आंतरिक हीटिंग तत्व के लिए स्विच चालू करें। इसी अमेरिकी बे के लिए उपयुक्त संज्ञाहरण वाल्व चालू करें जिसका उपयोग किया जाएगा।
नोट:: इमेजिंग अमेरिकी सॉफ़्टवेयर प्रारंभ करने से पहले अमेरिकी मशीन को चालू किया जाना चाहिए। - झिल्ली को कवर करने के लिए पर्याप्त पानी के साथ बे को भरें। नाक शंकु में anesthetized जानवर जगह.
- कार्डियक माप के लिए, जानवर को एक प्रवण स्थिति में रखें और इसे दाईं ओर लगभग 30 डिग्री कोण दें।
- गुर्दे के माप के लिए, जानवर को एक सीधी और सुपाइन स्थिति में रखें। जानवर और झिल्ली के बीच हवा की जेब को कम करने के लिए जानवर के शरीर को धीरे से समतल करें (चित्रा 1 बी)।
नोट: जानवर के शरीर के साथ एक उंगली चलाने से त्वचा का पालन करने वाले किसी भी हवा के बुलबुले को हटा दिया जा सकता है, जो इमेजिंग में हस्तक्षेप करेगा। अमेरिकी माध्यम के रूप में पानी या यूएस खारा जेल का उपयोग करें; लेकिन पानी यहां चर्चा की गई तेजी से इमेजिंग की सुविधा प्रदान करता है।
4. अल्ट्रासाउंड माप
- इमेजिंग यूएस सॉफ़्टवेयर में, यूएस अधिग्रहण का चयन करें और साधन को प्रारंभ करने की अनुमति दें।
- बी-मोड का उपयोग करके किडनी इमेजिंग।
- उपयुक्त संवाद बॉक्स में अध्ययन के लिए कोई नाम दर्ज करें.
- उपयुक्त संवाद बॉक्स में पशु ID दर्ज करें.
नोट: तीन जानवरों तक अनुक्रमिक रूप से चित्रित किया जा सकता है। - 3 डी स्कैनिंग प्रारंभ करने के लिए 3 डी लेबल वाले टैब पर क्लिक करें।
- लाइव कैमरा फ़ीड का उपयोग करके, गुर्दे को शामिल करने के लिए ब्याज के क्षेत्र (ROI) बॉक्स को स्थानांतरित करें।
नोट:: ROI का आकार छवि लक्ष्य के आकार के आधार पर समायोजित किया जा सकता है। ROI के आकार में वृद्धि स्कैन समय (चित्रा 1C) में थोड़ी वृद्धि होगी। ROI आकार के आधार पर, स्कैनर स्वचालित रूप से पूरे ROI को स्कैन करने के लिए ट्रांसड्यूसर के लिए आवश्यक पास की संख्या को समायोजित करेगा। - वांछित छवि के प्रकार के आधार पर, ट्रांसड्यूसर का चयन करने के लिए रैखिक सरणी या Wobbler का चयन करें। फास्ट स्कैन से चुनें या या तो ट्रांसड्यूसर के लिए अनुकूलित करें।
नोट: रैखिक सरणी तेज है और आमतौर पर पर्याप्त इमेजिंग प्रदान करता है। wobbler ट्रांसड्यूसर का उपयोग किया जा सकता है यदि रैखिक सरणी के साथ वांछित छवि गुणवत्ता प्राप्त करने में असमर्थ है। wobbler ट्रांसड्यूसर एक उच्च आवृत्ति तरंग दैर्ध्य का उपयोग करता है और इसलिए छवियों में अधिक परिभाषा प्रदान करता है। फास्ट स्कैन विकल्प एक उच्च गति पर कोई साँस लेने में सुधार के साथ मध्यम गुणवत्ता वाली छवियों का अधिग्रहण करता है। जबकि अनुकूलित विकल्प को थोड़ा अधिक समय की आवश्यकता होती है, यह बेहतर छवि गुणवत्ता प्रदान करता है और सांस लेने में सुधार की अनुमति देता है। यह पांडुलिपि अनुकूलित रैखिक सरणी प्रीसेट का उपयोग करने पर ध्यान केंद्रित करेगी। - इच्छित देखने के क्षेत्र की लाइव छवि देखने के लिए लाइव व्यू पर क्लिक करें।
- ट्रांसड्यूसर को स्थानांतरित करने के लिए, परिपत्र पर क्लिक करें करने के लिए जाओ करने के लिए बटन, और उसके बाद माउस के क्षेत्र पर क्लिक करने के लिए imaged किया जा करने के लिए। ट्रांसड्यूसर स्थिति को बारीक ढंग से समायोजित करने के लिए पूर्व निर्धारित चरण आकार के साथ दिशात्मक तीर का उपयोग करें।
- सेटिंग्स ट्रे खोलने के लिए नियंत्रण कक्ष विंडो के किनारे पर तीर पर क्लिक करें। स्कैनिंग सेटिंग्स खोलने के लिए स्कैन प्रोटोकॉल पर क्लिक करें।
- आदर्श फोकल गहराई निर्धारित करें और टीजीसी (समय लाभ मुआवजा) के लिए स्लाइडर्स को समायोजित करने के लिए सबसे अच्छा देखने के लिए सबसे अच्छा देखने के लिए छवि विपरीत बदलने के लिए। वांछित सेटिंग्स प्राप्त करने के बाद, सेटिंग्स ट्रे को बंद करने के लिए तीर पर फिर से क्लिक करें।
- 3डी स्कैनिंग प्रारंभ करने के लिए स्थैतिक प्राप्त करें बटन दबाएँ.
नोट:: स्कैन की प्रगति सॉफ़्टवेयर के नीचे बाईं ओर एक प्रगति पट्टी के माध्यम से इंगित किया गया है। - एक बार स्कैनिंग पूरी हो जाने के बाद, पूर्वावलोकन मोड में स्कैन खोलने के लिए नीले डाउनलोड तीर पर क्लिक करके छवि की गुणवत्ता की जांच करें। विंडो के शीर्ष पर लाल तीर खींचकर स्कैन के 3 डी फ्रेम के माध्यम से ले जाएँ। ज़ूम इन या आउट करने के लिए, Ctrl कुंजी दबाए रखें और माउस पर स्क्रॉल बटन का उपयोग करें.
- अतिरिक्त जानवरों को स्कैन करने के लिए, पशु ID संवाद बक्सों को ताज़ा करें, नई ID इनपुट करें, और तब उपरोक्त चरणों को दोहराएँ.
नोट: जब स्कैन पूरा हो जाता है, तो जानवरों को सुखाएं और उन्हें अपने घर के पिंजरों में वापस कर दें।
- एम मोड का उपयोग कर कार्डियक इमेजिंग.
नोट: एम-मोड एक विशिष्ट, चुने हुए अल्ट्रासाउंड लाइन के साथ एक अल्ट्रासाउंड तरंग का प्रदर्शन है।- कार्डियक इमेजिंग को सक्रिय करने के लिए एम मोड टैब पर क्लिक करें।
नोट: एक समय में केवल एक जानवर को चित्रित किया जा सकता है। - सुनिश्चित करें कि जानवर कार्डियक स्कैन (चरण 2.2) के लिए उपयुक्त स्थिति में है। आरओआई को दिल के अनुमानित स्थान पर ले जाएं।
- दिल का पता लगाने के लिए हार्ट फाइंडर बटन पुश करें। ट्रांसड्यूसर के स्थान को अनुकूलित करने के लिए गर्मी मानचित्र का उपयोग करें। ट्रांसड्यूसर को बाएं वेंट्रिकल (चित्रा 2 ए) में ले जाने के लिए परिपत्र गो टू बटन का उपयोग करें।
- लाइव व्यू पर जाएं और पैपिलरी मांसपेशियों (चित्रा 2 बी) के बीच ट्रांसड्यूसर रखने के लिए तीर बटन का उपयोग करें। ट्रांसड्यूसर के उचित प्लेसमेंट को सत्यापित करने के लिए, लाइव एम मोड ट्रेस (चित्रा 2 डी) देखें।
- एक बार ट्रांसड्यूसर उपयुक्त स्थिति में है, तो एक्वायर अनुक्रम पर क्लिक करें। पूर्ण स्कैन देखने के लिए नीले डाउनलोड तीर पर क्लिक करें।
- कार्डियक इमेजिंग को सक्रिय करने के लिए एम मोड टैब पर क्लिक करें।
5. गुर्दे का विश्लेषण (विश्लेषण के यांत्रिकी)
- छवि विश्लेषण टैब खोलें और छवि फ़ाइलों/फ़ोल्डरों को इनपुट करने के लिए वॉल्यूम लोड करें बटन का चयन करें।
- विभाजन
- सभी विमानों में गुर्दे को खोजने के लिए विभिन्न विमानों का प्रतिनिधित्व करने वाली रंगीन लाइनों को स्थानांतरित करें।
- एक नया विभाजन जोड़ने के लिए जोड़ें पर क्लिक करें। फ़ाइल के लिए कोई मार्कअप नाम प्रदान करें.
- एकाधिक विमानों में गुर्दे के बाहरी किनारे के चारों ओर अंक जोड़ने के लिए सरफेस कट बटन का उपयोग करें। पूरे गुर्दे के माध्यम से विभाजन उत्पन्न करने के लिए लागू करें पर क्लिक करें (चित्रा 3 ए)।
- प्रत्येक विमान में विभिन्न फ्रेम के माध्यम से स्क्रॉल करें और संपादित करें पर क्लिक करके और बिंदुओं को सही स्थान पर खींचकर किसी भी गलत क्षेत्र को संपादित करें ।
- वैकल्पिक रूप से, यदि गुर्दे आकार में अनियमित है, तो गुर्दे के चारों ओर अनियमित आकार का निशान बनाने के लिए ड्रा फ़ंक्शन का उपयोग करें । या तो किनारे के चारों ओर बिंदुओं पर क्लिक करें या ट्रेस फ्रीहैंड आकर्षित करने के लिए बाएं क्लिक को दबाए रखें।
- आरेखित करें बटन के साथ ट्रेस को पूरा करने के लिए, माउस के साथ राइट-क्लिक करें. एकाधिक फ़्रेम आगे स्क्रॉल करें और ट्रेसिंग प्रक्रिया को दोहराएं।
- तब तक दोहराएं जब तक कि फ्रेम ब्याज के पूरे क्षेत्र में ट्रेस नहीं किए जाते हैं।
- यदि आरेखित करें फ़ंक्शन का उपयोग किया जाता है, तो ट्रेस की जाँच करने और समायोजित करने के लिए स्लाइस के बीच भरण का चयन करें. पूर्वावलोकन देखने के लिए Initialize पर क्लिक करें. यदि पूर्वावलोकन स्वीकार्य है, तो लागू करें पर क्लिक करें। यदि नहीं, तो रद्द करें पर क्लिक करें और ट्रेसिंग को संशोधित करें।
नोट:: मिटाएँ बटन एक ट्रेस के भीतर किसी क्षेत्र को हटाने की अनुमति देगा। चिकनी बटन एक ट्रेस के जकड़े हुए किनारों smooths. - जब छवि विश्लेषण संतोषजनक हो, तो विश्लेषण को मूल छवि फ़ाइल में सहेजने के लिए सहेजें का चयन करें।
- माप
- छवि के भीतर सुविधाओं को मापने के लिए कैलिपर्स फ़ंक्शन का उपयोग करें। कैलिपर्स बटन पर क्लिक करें और मापा जाने वाली दूरी के दो बिंदुओं पर क्लिक करें (चित्रा 3 बी)।
- स्क्रीन के शीर्ष पर डिस्क बटन पर क्लिक करके माप सहेजें।
- विभाजन
6. कार्डियक विश्लेषण
- विश्लेषण करने के लिए फ़ाइल (फ़ाइलों) को इनपुट करने के लिए वॉल्यूम लोड करें का चयन करें।
- जोड़ें विकल्प का चयन करें।
- दिल के ऊतकों की प्रत्येक परत के लिए सिस्टोल और डायस्टोल का पता लगाने के लिए पॉइंट प्लेसमेंट टूल का उपयोग करें। दिल के ऊतकों की अन्य परतों के साथ जारी रखें। ट्रेस (चित्र 2C, D) को संशोधित करने के लिए संपादन फ़ंक्शन का उपयोग करें।
नोट:: M-मोड ट्रेस बहुत स्पष्ट है, तो स्वचालित रूप से प्रत्येक परत के ट्रेसिंग जनरेट करने के लिए जोड़ें (ऑटो) बटन का उपयोग करें। - कार्डियक पैरामीटर की गणना करने के लिए लागू करें का चयन करें। मात्रा निर्धारित करें टैब देखें और सभी डेटा को किसी *.csv फ़ाइल (चित्र2E) के रूप में निर्यात करने के लिए आँकड़े निर्यात करें का चयन करें.
Representative Results
गुर्दे के विश्लेषण के परिणाम
सतह क्षेत्र और मात्रा डेटा गुर्दे के विभाजन से प्राप्त किए जाते हैं। इस जानकारी का उपयोग प्रयोगात्मक और नियंत्रण मॉडल की तुलना करने या समय के साथ परिवर्तनों को ट्रैक करने के लिए किया जा सकता है। कैलिपर्स उपकरण जल्दी से असामान्यताओं (यानी, अल्सर, ट्यूमर) को मापने के लिए उपयोगी है और वे समय के साथ लंबाई में कैसे बदलते हैं। चित्रा 3 से पता चलता है कि विभाजन और कैलिपर दोनों विधियों का उपयोग पुटी की मात्रा को सटीक रूप से मापने के लिए किया जा सकता है। चित्रा 4 उम्र-मिलान नियंत्रण और प्रयोगात्मक (Pkd1RC / RC) चूहों के बीच कुल गुर्दे की मात्रा (TKV) में एक स्पष्ट अंतर को दर्शाता है। इन वॉल्यूम रेंडरिंग का 3 डी विज़ुअलाइज़ेशन सिस्टम के भीतर किया जा सकता है, जिसमें 3 डी स्पेस (चित्रा 5) के भीतर रोटेशन शामिल हैं। इन 3 डी-पुनर्निर्माण का उपयोग तब टीकेवी (एमएम 3) की गणना करने के लिए किया जाता है; चित्र 4) साथ ही व्यक्तिगत बड़े पुटी की मात्रा के रूप में अच्छी तरह से.
कार्डियक विश्लेषण के परिणाम
कई उपयोगी पैरामीटर एम मोड छवियों के विश्लेषण से प्राप्त कर रहे हैं। ये डेटा उस समय बाएं वेंट्रिकुलर (एलवी) कार्डियक फ़ंक्शन का एक अच्छा स्नैपशॉट प्रदान करते हैं। डेटा आउटपुट में एलवी आंतरिक व्यास, एलवी पश्चवर्ती दीवार, एलवी पूर्वकाल दीवार व्यास, इजेक्शन अंश, भिन्नात्मक शॉर्टनिंग, स्ट्रोक वॉल्यूम, हृदय गति, कार्डियक आउटपुट, एलवी वॉल्यूम और एलवी द्रव्यमान शामिल हैं। कार्डियक विश्लेषण की सफलता एम मोड छवि पर परतों के सटीक विभाजन पर निर्भर करती है। अधिकांश कार्डियोवैस्कुलर परिणामों की गणना पीछे और पूर्वकाल एंडोकार्डियल परतों के चरम सिस्टोलिक और डायस्टोलिक चरणों द्वारा की जाती है। पश्च एपिकार्डियल परत उज्ज्वल सफेद दिखाई देती है और पीछे की एंडोकार्डियल परत के समान पैटर्न का पालन करती है। पश्चवर्ती एंडोकार्डियल परत के लिए ट्रेसिंग को सबसे कम समोच्च पर रखा जाना चाहिए। पूर्वकाल एंडोकार्डियल परत को उस परत के उच्चतम समोच्च के साथ पता लगाया जाना चाहिए। पूर्वकाल epicardial परत जानवर की प्रवण स्थिति के कारण छवि के नीचे रैखिक दिखाई देता है (चित्रा 2 डी). चित्रा 6 प्रयोगात्मक और नियंत्रण चूहों के बीच कार्डियक आउटपुट में कोई महत्वपूर्ण अंतर नहीं के साथ एक अध्ययन का एक उदाहरण दिखाता है। गुर्दे इमेजिंग के साथ के रूप में, 3 डी कार्डियक विज़ुअलाइज़ेशन संभव है। फिर भी, कार्डियक चक्र का एक 4 डी विज़ुअलाइज़ेशन (पूरक चित्रा 1) अन्वेषक को मूल्यांकन किए गए जानवर में आकृति विज्ञान और चक्र-गतिशील असामान्यताओं दोनों को देखने और इंगित करने की अनुमति देता है।
आकृति विज्ञान मूल्यांकन
त्वरित और सस्ती मूल्यांकन के लिए, अमेरिका प्रभावी ढंग से अनुदैर्ध्य रूप से शारीरिक मापदंडों की निगरानी कर सकता है। हालांकि, कई अध्ययन अतिरिक्त रूप से महीन आकृति विज्ञान विशेषताओं को निर्धारित करना चाहते हैं, उदाहरण के लिए, अल्सर की संख्या और आकार, कैल्सीफिकेशन (गुर्दे की पथरी), संवहनीकरण, या फाइब्रोसिस की डिग्री। चित्रा 7 एक सामान्य माउस गुर्दे की तुलना सिस्टिक माउस किडनी से एक मध्यम कैल्सीफाइड माउस किडनी से करता है। यूएस सेंटर फ्रीक्वेंसी (रैखिक सरणी के साथ 10 मेगाहर्ट्ज) को 35 मेगाहर्ट्ज (वोबलर एम्पलीफायर) तक बढ़ाकर, बढ़ते विस्तार के चित्र प्राप्त किए जा सकते हैं।

चित्र1: अल्ट्रासाउंड प्रणाली और माउस प्लेसमेंट( A) अल्ट्रासाउंड प्रणाली का आरेख और ट्रांसड्यूसर का स्थान। (बी) अल्ट्रासाउंड मंच पर सुपाइन स्थिति में चूहों का दृश्य। (C) पशु आईडी के साथ ब्याज के क्षेत्र (गुर्दे) के लिए जगह में ब्याज के क्षेत्र (आरओआई) का उदाहरण। कृपया इस आंकड़े का एक बड़ा संस्करण देखने के लिए यहाँ क्लिक करें.

चित्रा 2: शारीरिक मापदंडों को प्राप्त करने के लिए कार्डियक अल्ट्रासाउंड इमेजिंग। (ए) एम-मोड इमेजिंग के लिए बाएं वेंट्रिकल में ट्रांसड्यूसर को स्थिति में रखने के लिए हार्ट फाइंडर हीटमैप छवि का उपयोग करें। बाएं वेंट्रिकल में ट्रांसड्यूसर स्थान को बड़े हरे रंग के बिंदु द्वारा इंगित किया जाता है। (बी) पैपिलरी मांसपेशियों (बिंदीदार बॉक्स) पर सही ढंग से रखे जाने पर ट्रांसड्यूसर का दृश्य। (सी) कार्डियक पैरामीटर को मापने के लिए आवश्यक परतों का उदाहरण दृश्य। (डी) पैनल सी में नामित परतों के साथ लाइव एम-मोड छवि का दृश्य (ऊपर से नीचे तक की परतें: पीछे एपिकार्डियल, पोस्टीरियर एंडोकार्डियल, पूर्वकाल एंडोकार्डियल, और पूर्वकाल एपिकार्डियल। (ई) कार्डियक माप से उत्पन्न आंकड़ों का उदाहरण आउटपुट। कृपया इस आंकड़े का एक बड़ा संस्करण देखने के लिए यहाँ क्लिक करें.

चित्र 3: गुर्दे और पुटी को मापने के लिए विभाजन और कैलिपर्स उपकरणों का उपयोग करना। (ए) दोनों गुर्दे (नीले और नारंगी छायांकन) के उदाहरण विभाजन (अक्षीय दृश्य) और नीचे सूचीबद्ध मात्राओं के साथ एक बड़ी पुटी (पीला) । गैर-खंडित दृश्यों को नीचे दिखाया गया है ताकि अनऑब्जक्योर किए गए यूएस को देखा जा सके। (बी) नीचे दिए गए माप के साथ चित्र 3 ए से एक ही पुटी (सैगिटल व्यू) को मापने के लिए कैलिपर्स का उदाहरण उपयोग। आयतन की गणना एक दीर्घवृत्त के लिए सूत्र का उपयोग करके की गई थी (आयतन = (4/3)π x a x b x c, जहां a, b, c क्रमशः x, y, z, सापेक्ष हैं)। कृपया इस आंकड़े का एक बड़ा संस्करण देखने के लिए यहाँ क्लिक करें.

चित्रा 4: डब्ल्यूटी और सिस्टिक माउस गुर्दे के टीकेवी वितरण। जंगली प्रकार (WT) (C57BL / 6J) और रोगग्रस्त (Pkd1RC / RC) चूहों के लिए टीकेवी का प्रतिनिधित्व। n = 22 (WT) n = 9 (Pkd1RC/RC); दो पूंछ टी परीक्षण के परिणाम: पी < 0.0001. बॉक्स 25-75 वें प्रतिशत मूल्यों को दिखाता है और व्हिस्कर 1.5 गुना इंटरक्वार्टल रेंज दिखाते हैं। कृपया इस आंकड़े का एक बड़ा संस्करण देखने के लिए यहाँ क्लिक करें.

चित्रा 5: खंडित गुर्दे और पुटी के एनिमेटेड 3 डी पुनर्निर्माण। सॉफ्टवेयर का उपयोग करते हुए, गुर्दे और पुटी के 3 डी अनुमानों को 3 डी स्पेस में घुमाया या हिलाया जा सकता है (नीला = बायां गुर्दे; पीला = बड़ा पुटी; नारंगी = दाएं गुर्दे)। इस आंकड़े को डाउनलोड करने के लिए कृपया यहाँ क्लिक करें.

चित्रा 6: अमेरिकी माप से कार्डियक शारीरिक पैरामीटर। डब्ल्यूटी और रोगग्रस्त (Pkd1RC / RC) चूहों के लिए कार्डियक आउटपुट (एमएल / मिनट) का प्रतिनिधित्व। n = 22 (WT) n = 9 (Pkd1RC/RC)। कम सारणीबद्ध डेटा से पता चलता है कि इजेक्शन अंश, स्ट्रोक वॉल्यूम, हृदय गति (एचआर), या कार्डियक आउटपुट (सीओ) में इन दो समूहों के लिए कोई महत्वपूर्ण अंतर नहीं है। दो-पूंछ वाले टी-टेस्ट के परिणाम: पी > 0.05। बॉक्स 25-75 वें प्रतिशतमान दिखाता है। कृपया इस आंकड़े का एक बड़ा संस्करण देखने के लिए यहाँ क्लिक करें.

चित्र7: सामान्य और दो विकृति के यूएस सैगिटल वर्गों की तुलना। (ए) जंगली-प्रकार (C57BL / 6J तनाव) गुर्दे (TKV = 143.202 mm3)। (बी) बढ़े हुए टीकेवी (Pkd1RC / RC माउस) के साथ सिस्टिक किडनी (TKV = 333.158 mm3)। अल्सर पीले तीर द्वारा इंगित किए जाते हैं। (सी) संवहनी कैल्सीफिकेशन के साथ गुर्दे (मॉडल = कम घनत्व वाले लिपोप्रोटीन रिसेप्टर की कमी, एपोलिपोप्रोटीन बी 100-केवल माउस ने 12 महीने के लिए पश्चिमी आहार खिलाया 5) (टीकेवी = 127.376 मिमी 3)। गुर्दे की पथरी को हरे तीर द्वारा इंगित किया जाता है। कृपया इस आंकड़े का एक बड़ा संस्करण देखने के लिए यहाँ क्लिक करें.
पूरक चित्रा 1: अमेरिका माप से 4 डी कार्डियक चक्र फिल्म। सॉफ्टवेयर का उपयोग करते हुए, धड़कते दिल का एक प्रतिनिधित्व 3 डी अमेरिका में कब्जा कर लिया है और कार्डियक चक्र के माध्यम से प्रक्षेपित किया गया है। हरा तीर महाधमनी वाल्व को इंगित करता है। (मॉडल = कम घनत्व वाले लिपोप्रोटीन रिसेप्टर की कमी, एपोलिपोप्रोटीन बी 100-केवल माउस, 12 महीने के लिए एक पश्चिमी आहार खिलाया 5)। यह मॉडल संवहनी कैल्सीफिकेशन उत्पन्न करता है जो अमेरिका में कैल्सीफिकेशन की अधिक ध्वनिक परावर्तकता के कारण हृदय और वाल्व के आसान विज़ुअलाइज़ेशन को सक्षम करता है। डब्ल्यूटी चूहों के साथ इसी तरह के 4 डी पुनर्निर्माण संभव हैं; हालांकि, कब्जा कर लिया ध्वनिक विपरीत के रूप में उच्च के रूप में नहीं होगा. कृपया इस फ़ाइल को डाउनलोड करने के लिए यहाँ क्लिक करें।
Discussion
अल्ट्रासाउंड ध्वनि तरंगों का उपयोग करता है, और ध्वनि तरंग प्रसार के लिए किसी भी बाधाओं छवि की गुणवत्ता के साथ हस्तक्षेप करेंगे। इस प्रकार, छविकृत किए जाने वाले क्षेत्र के पूर्ण बालों को हटाने के लिए महत्वपूर्ण है। डिपिलेटरी क्रीम को पूरी तरह से हटाने को सुनिश्चित करना भी महत्वपूर्ण है क्योंकि यह जानवर की त्वचा के जलने / जलन का कारण बन सकता है और स्कैनर की पारदर्शी झिल्ली को बदरंग कर सकता है। बे में पर्याप्त पानी का स्तर इष्टतम ध्वनि तरंग प्रसार के लिए आवश्यक है, इस प्रकार उच्चतम छवि संकल्प प्राप्त करने के लिए आवश्यक है। हालांकि, जब जानवर एक प्रवण स्थिति में होता है, तो सुनिश्चित करें कि जानवर का थूथन पानी के स्तर से ऊपर है या जानवर को पानी की साँस लेने का खतरा है। इमेजिंग पैरामीटर का अनुकूलन, विशेष रूप से फोकल गहराई, उच्च गुणवत्ता वाली छवियों को प्राप्त करने के लिए महत्वपूर्ण है। मापदंडों में संशोधन व्यक्तिगत जानवरों के लिए आवश्यक हो सकते हैं।
रोबोटिक यूएस पारंपरिक हाथ से आयोजित अमेरिकी तौर-तरीकों पर कई फायदे प्रदान करता है। सबसे पहले, सिस्टम एक साधारण बिंदु-और-क्लिक कैमरा-आधारित इंटरफ़ेस का उपयोग करता है। यह सुविधा पारंपरिक अमेरिका की जटिलता को संबोधित करती है और एक नौसिखिया उपयोगकर्ता 6 द्वारा संचालित होने पर भी लगातार डेटा का उत्पादन करती है। दूसरा, सिस्टम एक ध्वनिक माध्यम के रूप में पारंपरिक यूएस जेल के बजाय पानी के उपयोग की अनुमति देता है। इससे पहले, यूएस जेल के उपयोग ने बुलबुले के गठन की अनुमति दी जो गुणवत्ता छवि अधिग्रहण के साथ हस्तक्षेप करते थे। इसके अलावा, अमेरिकी जेल गन्दा है और सफाई के लिए चुनौतियां प्रदान करता है। इसके अलावा, पानी को गर्मी दीपक द्वारा गर्म किया जाता है और जानवर के शरीर के तापमान को बनाए रखने में मदद करता है। तीसरा, रोबोट अमेरिका तेज है, इसलिए श्वसन गति से कलाकृतियां समस्याग्रस्त नहीं हैं। बढ़ी हुई इमेजिंग गति उच्च थ्रूपुट डेटा संग्रह के व्यावहारिक समापन के लिए अनुमति देती है। चौथा, रोबोट अमेरिका 3 डी छवियों को प्राप्त करता है, और इसलिए वस्तुओं के 3 डी पुनर्निर्माण को सरल बनाता है (चित्रा 4)। एमआरआई और अन्य तौर-तरीके महंगे, समय लेने वाले हैं, और हमेशा उपलब्ध नहीं हैं। महत्वपूर्ण रूप से, रोबोट यूएस सिस्टम एक मेज या बेंच पर फिट बैठता है और अधिक लागत कुशल है। अंत में, पहले के काम ने प्रदर्शित किया कि रोबोट अमेरिका एमआरआई 3 जैसे अधिक महंगे तौर-तरीकों के लिए तुलनीय माप डेटा प्रदान कर सकता है।
जबकि इस काम में वर्णित रोबोट यूएस सिस्टम की छवि गुणवत्ता और रिज़ॉल्यूशन प्रस्तावित एप्लिकेशन (चित्रा 7) के लिए पर्याप्त थे, ऐसे कई तरीके हैं जिनसे भविष्य में छवि की गुणवत्ता में सुधार किया जा सकता है। उदाहरण के लिए, उच्च आवृत्ति ट्रांसड्यूसर (जैसे, 50-70 मेगाहर्ट्ज) का उपयोग करने से बेहतर सुविधा परिभाषा के साथ उच्च रिज़ॉल्यूशन छवियां होंगी। जबकि उच्च आवृत्तियों का उपयोग करने के परिणामस्वरूप प्रवेश की एक गरीब गहराई होगी, छवियों को सतही अंगों के विवो इमेजिंग के लिए पर्याप्त होना चाहिए, जैसे कि माउस किडनी। अन्य इमेजिंग तौर-तरीकों के साथ, विशिष्ट विशेषताओं को बढ़ाने के लिए कंट्रास्ट एजेंटों का उपयोग किया जा सकता है। हमारे लिए, यह आमतौर पर ध्वनि तरंगों के अत्यधिक प्रतिबिंबित कुछ का उपयोग करने का मतलब है। इंट्रावैस्कुलर माइक्रोबबल्स जिसमें लिपिड बहुत छोटे गैस बुलबुले को घेरते हैं, एक ऐसा एजेंट है। माइक्रोन-आकार के गैस बुलबुले अत्यधिक चिंतनशील होते हैं और इस प्रकार एक दूसरा अलग संकेत प्रदान करते हैं जो वास्कुलचर 7 के उच्च-रिज़ॉल्यूशन में अनुवाद करता है। हालांकि यह ध्वनिक विपरीत तकनीक काफी उपयोगी हो सकती है, इसमें कई डाउनसाइड हो सकते हैं। सबसे पहले, माइक्रोबबल्स को ताजा बनाया जाना चाहिए और केवल 5-10 मिनट के लिए वीवो में बने रहना चाहिए। दूसरा, विवो इंट्रावैस्कुलर इंजेक्शन में आमतौर पर इंजेक्शन के लिए पूंछ घूंघट कैथीटेराइजेशन की आवश्यकता होती है, और यह तकनीकी रूप से चुनौतीपूर्ण हो सकता है। कुछ परिस्थितियों और स्पंदन शासनों के तहत, माइक्रोबबल इमेजिंग स्वयं वृक्क वास्कुलचर क्षति 8 का कारण बन सकती है।
उपयोग की जाने वाली विशेष अमेरिकी प्रणाली की कुछ और सामान्य सीमाएं भी हैं। सबसे पहले, केवल एक रैखिक सरणी (18 मेगाहर्ट्ज पर केंद्रित) रोबोट चेसिस में शामिल है, इसलिए उच्च या निम्न आवृत्ति जांच पर स्विच करना वर्तमान में संभव नहीं है। यह मॉडल (या तो बड़ा या छोटा) की चौड़ाई को प्रभावित कर सकता है जिसका मूल्यांकन सिस्टम के साथ किया जा सकता है। उपकरण के भविष्य के पुनरावृत्तियों में प्रीक्लिनिकल पशु मॉडल की पूरी श्रृंखला को कवर करने के लिए कई रैखिक सरणियों को शामिल किया जाना चाहिए। दूसरा, पशु विषय के सापेक्ष ट्रांसड्यूसर कोण को नियंत्रित नहीं किया जा सकता है। इसलिए, कोण-निर्भर इमेजिंग तकनीकों का प्रदर्शन करना, जैसे कि डॉपलर, या कुछ अंगों के वैकल्पिक इन-प्लेन विचारों को प्राप्त करना (उदाहरण के लिए, गुर्दे का लंबा अक्ष दृश्य) जानवर की पुनर्स्थापना की आवश्यकता होती है और इसे प्राप्त करना मुश्किल हो सकता है। इस चुनौती को सुधारने के लिए रोबोट आंदोलन में अतिरिक्त डिग्री-ऑफ-फ्रीडम को जोड़ा जा सकता है। तीसरा, अवसर पर, हमने ध्वनिक झिल्ली से उत्पन्न होने वाली गूंज कलाकृतियों को देखा है जो जानवर को ट्रांसड्यूसर से अलग करता है जो सतही विशेषताओं और सीमाओं के दृश्य को अस्पष्ट कर सकता है। इन मामलों में, झिल्ली से दूर जानवर को ऊपर उठाने के लिए जेल गतिरोध का उपयोग करना स्थिति को ठीक कर सकता है। अंत में, गर्मी लैंप के माध्यम से तापमान नियंत्रण imprecise है, और इसलिए इमेजिंग करते समय जानवर के मुख्य शरीर के तापमान पर करीब से ध्यान दिया जाना चाहिए। अधिक नियंत्रित हीटिंग तंत्र, जैसे कि एक एकीकृत हीटिंग पैड, संभवतः होमोस्टैसिस प्रबंधन और इमेजिंग थ्रूपुट में सुधार करेगा।
रोबोटिक यूएस का उपयोग अनुसंधान के विभिन्न क्षेत्रों पर लागू हो सकता है। यह तकनीक सकल ऊतक संरचनाओं के विज़ुअलाइज़ेशन को सक्षम बनाती है, इस प्रकार इसका उपयोग ट्यूमर की प्रगति और संभावित उपचारों को ट्रैक करने के लिए किया जा सकता है6,9 के साथ-साथ गुर्दे की आकृति विज्ञान जैसा कि यहां प्रस्तुत किया गया है। छवियों की विशिष्ट विशेषताओं को विभाजित करने की क्षमता इसे पॉलीसिस्टिक किडनी रोग (पीकेडी) 3 के मॉडल का अध्ययन करने के लिए एक आकर्षक उपकरण बनाती है। एम-मोड छवियां कार्डियक फिजियोलॉजी के विवो मूल्यांकन में सक्षम होने वाले कई महत्वपूर्ण कार्डियक पैरामीटर के सरल परिमाणीकरण के लिए अनुमति देती हैं। जैसा कि गुर्दे कार्डियक आउटपुट 10 का 20% -25% प्राप्त करते हैं, गुर्दे की विकृति के अनुदैर्ध्य मूल्यांकन के दौरान कार्डियक फ़ंक्शन को समझना महत्वपूर्ण है। इन अमेरिकी प्रोटोकॉल के माध्यम से, हमने यह समझाने की कोशिश की है कि यूएस इमेजिंग न केवल विवो और अनुदैर्ध्य गुर्दे के अध्ययन के लिए व्यावहारिक है, बल्कि यह भी कि तेजी से अमेरिकी उपकरण प्रीक्लिनिकल अध्ययनों में चूहों के आकारिकी के साथ-साथ शारीरिक मूल्यांकन दोनों को सक्षम करते हैं।
Disclosures
कई लेखकों को या तो नियोजित किया जाता है, में एक महत्वपूर्ण वित्तीय रुचि है, या SonoVol, Inc. (CJM, RCG, TJC) द्वारा लाइसेंस प्राप्त पेटेंट पर सह-आविष्कारक हैं।
Acknowledgments
इस काम को एनआईएच (R43-DK126607, TJC, TLK, MFR) और मेयो फाउंडेशन द्वारा समर्थित किया गया था।
Materials
| Name | Company | Catalog Number | Comments |
| Electric Razor | Braintree Scientific, Inc | CLP-9868 14 | |
| C57bk6j | The Jackson laboratory | https://www.jax.org/ | |
| Cotton gauze pads | Fisher Scientific | ||
| Cotton tipped applicators | Fisher Scientific | ||
| Depilatory cream | N/a | N/a | This study used Nair |
| Heat lamp | Included with SonoVol Vega system | ||
| Robotic Ultrasound System | SonoVol Inc | SonoVol Vega system includes anesthesia system | |
| SonoEQ Software | SonoVol | Included with SonoVol Vega system | |
| TERRELL Isoflurane | Piramal Critical Care, Inc | NDC 66794-019-10 |
References
- Cunha, L., et al. Preclinical imaging: an essential ally in modern biosciences. Molecular Diagnostics & Therapy. 18 (2), 153-173 (2014).
- Ultrasound. NIBIB. , Available from: https://www.nibib.nih.gov/science-education/science-topics/ultrasound#pid-936 (2016).
- Beaumont, N. J., et al. Assessing polycystic kidney disease in rodents: Comparison of robotic 3d ultrasound and magnetic resonance imaging. Kidney360. 1 (10), 1128-1136 (2020).
- Hopp, K., et al. Functional polycystin-1 dosage governs autosomal dominant polycystic kidney disease severity. The Journal of Clinical Investigation. 122 (11), 4257-4273 (2012).
- Weiss, R. M., Ohashi, M., Miller, J. D., Young, S. G., Heistad, D. D. Calcific aortic valve stenosis in old hypercholesterolemic mice. Circulation. 114 (19), 2065-2069 (2006).
- Czernuszewicz, T. J., et al. A new preclinical ultrasound platform for widefield 3D imaging of rodents. Review of Scientific Instruments. 89 (7), 075107 (2018).
- Chong, W. K., Papadopoulou, V., Dayton, P. A. Imaging with ultrasound contrast agents: current status and future. Abdominal Radiology (NY). 43 (4), 762-772 (2018).
- Nyankima, A. G., Kasoji, S., Cianciolo, R., Dayton, P. A., Chang, E. H. Histological and blood chemistry examination of the rodent kidney after exposure to flash-replenishment ultrasound contrast imaging. Ultrasonics. 98, 1-6 (2019).
- Rojas, J. D., et al. Ultrasound measurement of vascular density to evaluate response to anti-angiogenic therapy in renal cell carcinoma. IEEE Transactions on Biomedical Engineering. 66 (3), 873-880 (2019).
- Boron, W. F., Boulpaep, E. L. Medical Physiology. 3rd edn. , Elsevier. (2017).
Tags
चिकित्सा अंक 174Erratum
Formal Correction: Erratum: Use of 3D Robotic Ultrasound for In Vivo Analysis of Mouse Kidneys
Posted by JoVE Editors on 10/06/2021.
Citeable Link.
An erratum was issued for: Use of 3D Robotic Ultrasound for In Vivo Analysis of Mouse Kidneys. An author name was updated, along with the Protocol and Representative Results sections.
The name of an author was updated from:
Ryan C. Gesser
to:
Ryan C. Gessner
Step 3.1 of the Protocol was updated from:
Turn on the US machine and the heat lamp above the US platforms. Turn on the appropriate anesthesia valves for the corresponding US bays that will be used.
to:
Turn on the US machine and the switch for the internal heating element for the US bays. Turn on the appropriate anesthesia valves for the corresponding US bays that will be used.
Figue 1 in the Representative Results was updated from:
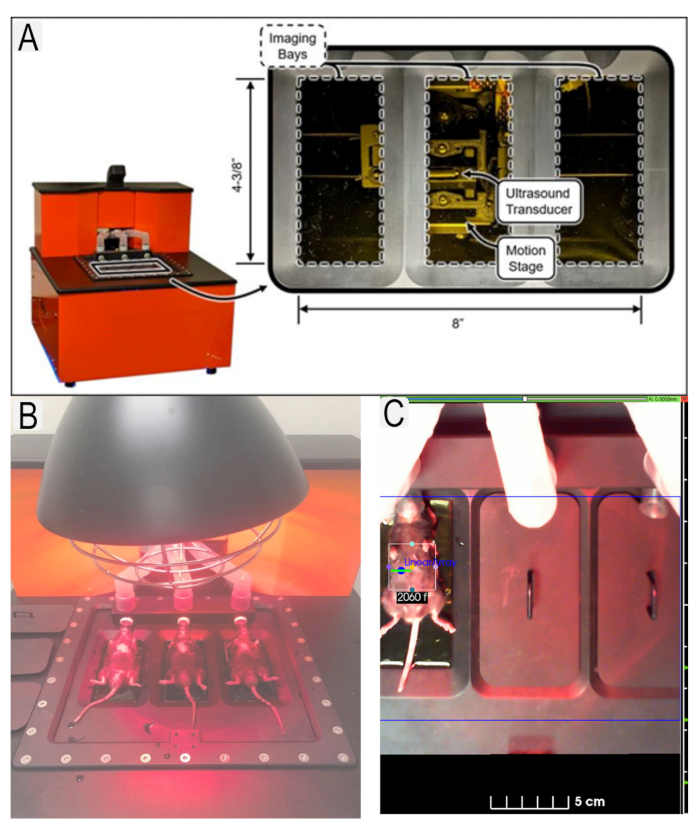
Figure 1: Ultrasound system and mouse placement. (A) Diagram of ultrasound system and location of transducers. (B) View of mice in supine position on ultrasound platform with heat lamp. (C) Example of region of interest (ROI)s in place for area of interest (kidneys) with animal IDs. Please click here to view a larger version of this figure.
to:
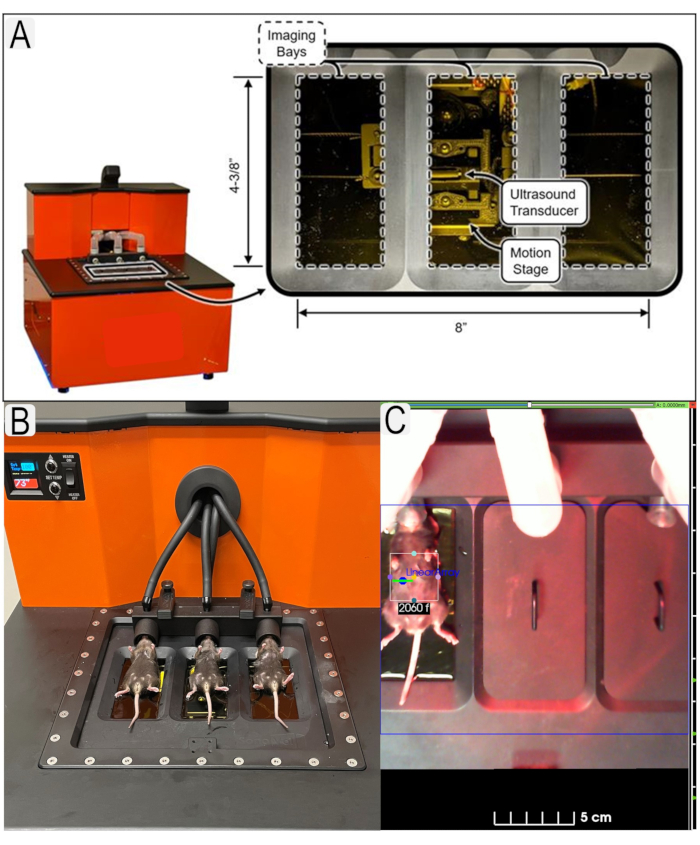
Figure 1: Ultrasound system and mouse placement. (A) Diagram of ultrasound system and location of transducers. (B) View of mice in supine position on ultrasound platform. (C) Example of region of interest (ROI)s in place for area of interest (kidneys) with animal IDs. Please click here to view a larger version of this figure.
