

ERRATUM NOTICE
Important: There has been an erratum issued for this article. Read more …
Summary
Questo protocollo dimostra l'ecografia robotica (US) come un'alternativa pratica, economica e rapida alle tradizionali modalità di immagine non invasive.
Abstract
Le modalità comuni per l'imaging in vivo dei roditori includono la tomografia ad emissione di positroni (PET), la tomografia computerizzata (TC), la risonanza magnetica (MRI) e gli ultrasuoni (US). Ogni metodo presenta limitazioni e vantaggi, tra cui disponibilità, facilità d'uso, costi, dimensioni e l'uso di radiazioni ionizzanti o campi magnetici. Questo protocollo descrive l'uso di US robotici 3D per l'imaging in vivo di reni e cuore di roditori, successiva analisi dei dati e possibili applicazioni di ricerca. Le applicazioni pratiche degli Stati Uniti robotici sono la quantificazione del volume totale dei reni (TKV), nonché la misurazione di cisti, tumori e vascolarizzazione. Sebbene la risoluzione non sia così alta come altre modalità, la robotica statunitense consente una raccolta di dati ad alta produttività più pratica. Inoltre, utilizzando l'imaging in modalità M degli Stati Uniti, la funzione cardiaca può essere quantificata. Poiché i reni ricevono il 20% -25% della gittata cardiaca, la valutazione della funzione cardiaca è fondamentale per la comprensione della fisiologia e della fisiopatologia renale.
Introduction
Le modalità più comuni per l'imaging dei roditori in vivo includono la tomografia ad emissione di positroni (PET), l'imaging ottico (OI), la tomografia computerizzata (CT), la risonanza magnetica (MRI) e gli ultrasuoni (US). Queste tecniche forniscono immagini in vivo ad alta risoluzione, consentendo ai ricercatori di valutare quantitativamente e seguire longitudinalmente i modelli di malattia in modo non invasivo1. Mentre ogni modalità di imaging ha dei limiti, forniscono anche strumenti inestimabili per la ricerca preclinica.
Qui, lo studio descrive in dettaglio un sistema statunitense e presenta il protocollo per l'imaging robotico e 3D dei roditori. Le onde statunitensi sono prodotte da una sonda chiamata trasduttore, che è tipicamente portatile. Le onde sonore vengono riflesse mentre interagiscono con i tessuti e gli echi vengono ricostruiti in immagini2. Il protocollo qui descritto si concentrerà sull'imaging renale e cardiaco utilizzando un trasduttore controllato roboticamente e utilizzando un software che consente una rapida ricostruzione 3D per la valutazione quantitativa.
Robotic US è una modalità di imaging veloce, affidabile e non invasiva che consente agli investigatori di condurre studi longitudinali e ad alto rendimento. Rispetto ai metodi statunitensi portatili, il metodo robotico statunitense è efficiente in termini di tempo, poiché è possibile scansionare fino a tre animali in pochi minuti. L'elevata produttività per le misurazioni renali suggerisce che possono essere ripresi fino a 20 topi all'ora. I trasduttori robotici si trovano sotto le membrane acustiche e si muovono indipendentemente dall'animale con due gradi di libertà (Figura 1A). Ciò consente agli utenti inesperti di ottenere immagini di alta qualità, mentre i metodi statunitensi portatili sono più suscettibili all'errore dell'utente. Il software accoppiato consente una ricostruzione renale 3D efficiente e in tempo reale. In precedenza, la risonanza magnetica (MRI) è stata un metodo prevalente per l'imaging non invasivo a causa dell'eccellente contrasto dei tessuti molli, della mancanza di radioattività e della profondità di penetrazione. Tuttavia, la risonanza magnetica richiede spesso lunghi tempi di acquisizione ed è costosa da eseguire. Gli Stati Uniti sono stati valutati come un'alternativa affidabile e più rapida alla risonanza magnetica nella valutazione del volume renale totale (TKV)3.
Protocol
Tutte le fasi di questo protocollo sono conformi alle linee guida per l'uso degli animali della Mayo Clinic (Rochester, MN) e sono state approvate dal Comitato istituzionale per la cura e l'uso degli animali della Mayo Clinic.
1. Modello animale
- Ottenere topi da fonti commerciali.
NOTA: C57BL/6J (età = 18 mesi; n = 22 (7 maschi, 15 femmine)) (Tabella dei materiali) e Pkd1(RC/RC) (età = 18 mesi; n = 9 (3 maschi, 6 femmine))4 sono stati utilizzati per lo studio.
2. Depilazione
- Anestetizzare l'animale usando isoflurano vaporizzato (2%-3%) in una camera di anestesia. Assicurarsi che l'animale sia sufficientemente anestetizzato eseguendo un pizzico della punta. Assicurarsi che il mouse stia respirando ad una velocità di circa 60-90 respiri / min senza evidenti inghiottimenti d'aria.
NOTA: L'isoflurano vaporizzato è stato scelto per la capacità di controllare e mettere a punto il livello di anestesia dell'animale. È stato utilizzato isoflurano miscelato con ossigeno al 100%. - Utilizzare un rasoio elettrico per radere l'area della pelle desiderata per le misurazioni statunitensi.
NOTA: In questo studio, l'attenzione si concentra sulle misurazioni renali e cardiache, quindi il torace e la schiena dell'animale sono stati rasati. - Applicare la crema depilatoria sulla pelle rasata dell'animale con un applicatore con punta di cotone. Pulire la crema dopo 30-60 s usando un tovagliolo di carta asciutto. Quindi, continuare a pulire i residui di crema depilatoria usando tamponi di garza bagnati. Assicurarsi che la depilazione sia completa prima di iniziare le scansioni.
NOTA: tutti i capelli rimanenti interferiranno con la qualità dell'immagine; la depilazione completa è fondamentale. Tuttavia, è necessario pulire la crema depilatoria entro un minuto per evitare di ferire la pelle dell'animale. La crema depilatoria avanzata sull'animale può macchiare la membrana di imaging della macchina statunitense. Garantire una corretta pulizia dell'animale utilizzando garze bagnate.
3. Posizionamento degli animali
- Accendere la macchina statunitense e l'interruttore per l'elemento riscaldante interno per le baie degli Stati Uniti. Accendere le valvole di anestesia appropriate per i corrispondenti alloggiamenti statunitensi che verranno utilizzati.
NOTA: la macchina statunitense deve essere accesa prima di avviare il software di imaging statunitense. - Riempire le baie con acqua sufficiente a coprire la membrana. Posizionare l'animale anestetizzato nel cono del naso.
- Per le misurazioni cardiache, posizionare l'animale in posizione prona e inclinarlo di circa 30 ° a destra.
- Per le misurazioni renali, posizionare l'animale in posizione diritta e supina. Appiattire delicatamente il corpo dell'animale per ridurre al minimo le sacche d'aria tra l'animale e la membrana (Figura 1B).
NOTA: Far scorrere un dito accanto al corpo dell'animale può rimuovere eventuali bolle d'aria aderenti alla pelle, che interferiranno con l'imaging. Utilizzare acqua o gel salino statunitense come mezzo statunitense; ma l'acqua facilita l'imaging rapido discusso qui.
4. Misurazioni ad ultrasuoni
- Nel software di imaging statunitense, selezionare US Acquisition e consentire l'inizializzazione dello strumento.
- Imaging renale utilizzando la modalità B.
- Immettere un nome per lo studio nella finestra di dialogo appropriata.
- Immettere l'ID animale nella finestra di dialogo appropriata.
NOTA: è possibile visualizzare in sequenza fino a tre animali. - Fare clic sulla scheda denominata 3D per inizializzare la scansione 3D.
- Utilizzando il feed della telecamera dal vivo, spostare la casella della regione di interesse (ROI) per contenere i reni.
NOTA: la dimensione del ROI può essere regolata in base alle dimensioni della destinazione dell'immagine. L'aumento delle dimensioni del ROI aumenterà leggermente il tempo di scansione (Figura 1C). A seconda delle dimensioni del ROI, lo scanner regolerà automaticamente il numero di passaggi necessari al trasduttore per eseguire la scansione dell'intero ROI. - A seconda del tipo di immagine desiderata, selezionare Linear Array o Wobbler, per scegliere il trasduttore. Selezionare tra Scansione rapida o Ottimizzato per entrambi i trasduttori.
NOTA: l'array lineare è più veloce e di solito fornisce immagini adeguate. Il trasduttore oscillatore può essere utilizzato se non è in grado di acquisire la qualità dell'immagine desiderata con l'array lineare. Il trasduttore oscillatore utilizza una lunghezza d'onda a frequenza più elevata e quindi fornisce una maggiore definizione nelle immagini. L'opzione Scansione veloce acquisisce immagini di qualità media senza correzione della respirazione a una velocità più elevata. Mentre l'opzione Ottimizzato richiede un po 'più di tempo, fornisce una migliore qualità dell'immagine e consente la correzione della respirazione. Questo manoscritto si concentrerà sull'utilizzo del preset Array lineare ottimizzato. - Fare clic su Live View per visualizzare un'immagine dal vivo dell'area di visualizzazione desiderata.
- Per spostare il trasduttore, fare clic sul pulsante circolare Vai a , quindi fare clic sull'area del mouse da visualizzare. Utilizzate le frecce direzionali con dimensioni dei passi predeterminate per regolare finemente la posizione del trasduttore.
- Fare clic sulla freccia sul lato della finestra del Pannello di controllo per aprire la barra delle impostazioni. Fare clic su Scan Protocol per aprire le impostazioni di scansione.
- Determinare la profondità focale ideale e regolare i cursori per il TGC (compensazione del guadagno di tempo) per modificare il contrasto dell'immagine per visualizzare al meglio i reni. Dopo aver raggiunto le impostazioni desiderate, fare nuovamente clic sulla freccia per chiudere la barra delle impostazioni.
- Premere il pulsante Acquisisci statico per avviare la scansione 3D.
NOTA: l'avanzamento della scansione è indicato tramite una barra di avanzamento in basso a sinistra del software. - Una volta completata la scansione, controllare la qualità dell'immagine facendo clic sulla freccia blu di download per aprire la scansione in modalità anteprima. Spostarsi tra i fotogrammi 3D della scansione trascinando la freccia rossa nella parte superiore della finestra. Per ingrandire o rimpicciolire, tenere premuto il tasto Ctrl e utilizzare il pulsante di scorrimento del mouse.
- Per analizzare altri animali, aggiornare le finestre di dialogo ID animale, immettere i nuovi ID e quindi ripetere i passaggi precedenti.
NOTA: Quando le scansioni sono complete, asciugare gli animali e riportarli alle loro gabbie di casa.
- Imaging cardiaco con modalità M.
NOTA: la modalità M è la visualizzazione di un'onda ultrasonica lungo una linea ad ultrasuoni specifica e scelta.- Fare clic sulla scheda Modalità M per attivare l'imaging cardiaco.
NOTA: è possibile visualizzare un solo animale alla volta. - Assicurarsi che l'animale si trovi nella posizione appropriata per le scansioni cardiache (fase 2.2). Sposta il ROI nella posizione approssimativa del cuore.
- Premi il pulsante Heart Finder per individuare il cuore. Utilizzare la mappa di calore per ottimizzare la posizione del trasduttore. Utilizzare il pulsante circolare Vai a per spostare il trasduttore sul ventricolo sinistro (Figura 2A).
- Vai alla Live View e usa i pulsanti freccia per posizionare il trasduttore tra i muscoli papillari (Figura 2B). Per verificare il corretto posizionamento del trasduttore, visualizzare la traccia in modalità M in tempo reale (Figura 2D).
- Una volta che il trasduttore è nella posizione appropriata, fare clic su Acquisisci sequenza. Fare clic sulla freccia blu di download per visualizzare la scansione completata.
- Fare clic sulla scheda Modalità M per attivare l'imaging cardiaco.
5. Analisi renale (meccanica dell'analisi)
- Aprire la scheda Analisi immagine e selezionare il pulsante Carica volumi per inserire i file/cartelle immagine.
- Segmentazione
- Sposta le linee colorate che rappresentano vari piani per trovare il rene in tutti i piani.
- Clicca su Aggiungi per aggiungere una nuova segmentazione. Specificare un nome di markup per il file.
- Utilizzate il pulsante Taglio superficie (Surface Cut ) per aggiungere punti attorno al bordo esterno del rene su più piani. Fare clic su Applica per generare la segmentazione attraverso l'intero rene (Figura 3A).
- Scorri i diversi fotogrammi in ogni piano e modifica eventuali regioni imprecise facendo clic su Modifica e trascinando i punti nella posizione corretta.
- In alternativa, se il rene è di forma irregolare, utilizzare la funzione Draw per creare una traccia di forma irregolare intorno al rene. Fare clic sui punti attorno al bordo o tenere premuto il tasto sinistro del mouse per disegnare la traccia a mano libera.
- Per completare la traccia con il pulsante Disegna , fare clic con il pulsante destro del mouse. Scorrere più fotogrammi in avanti e ripetere il processo di traccia.
- Ripetere l'operazione fino a quando i fotogrammi non vengono tracciati in tutta l'area di interesse.
- Se si utilizza la funzione Disegna , selezionare Riempi tra le sezioni per controllare e regolare la traccia. Clicca su Inizializza per vedere un'anteprima. Se l'anteprima è accettabile, fare clic su Applica. In caso contrario, fare clic su Annulla e modificare le tracce.
NOTA: il pulsante Cancella consente l'eliminazione di un'area all'interno di una traccia. Il pulsante Liscia (Smooth ) attenua i bordi frastagliati di una traccia. - Quando l'analisi dell'immagine è soddisfacente, selezionare Salva per salvare l'analisi nel file di immagine originale.
- Misurazione
- Utilizzare la funzione Calibri per misurare le caratteristiche all'interno dell'immagine. Fare clic sul pulsante Pinze e fare clic con il pulsante sinistro del mouse sui due punti della distanza da misurare (Figura 3B).
- Salvare la misurazione facendo clic sul pulsante del disco nella parte superiore dello schermo.
- Segmentazione
6. Analisi cardiaca
- Selezionare Carica volumi per inserire i file da analizzare.
- Seleziona l'opzione Aggiungi .
- Utilizzare lo strumento Posizionamento punto per tracciare la sistole e la diastole per ogni strato di tessuto cardiaco. Continuare con gli altri strati di tessuto cardiaco. Utilizzare la funzione Modifica per modificare le tracce (Figura 2C,D).
NOTA: se la traccia in modalità M è molto chiara, utilizzare il pulsante Aggiungi (automatico) per generare automaticamente le tracciature di ciascun livello. - Selezionare Applica per calcolare i parametri cardiaci. Visualizzare la scheda Quantifica e selezionare Esporta statistiche per esportare tutti i dati come file *.csv (Figura 2E).
Representative Results
Risultati dell'analisi renale
I dati di superficie e volume vengono acquisiti dalla segmentazione dei reni. Queste informazioni possono essere utilizzate per confrontare modelli sperimentali e di controllo o tenere traccia dei cambiamenti nel tempo. Lo strumento pinze è utile per misurare rapidamente le anomalie (ad esempio, cisti, tumori) e come cambiano in lunghezza nel tempo. La Figura 3 suggerisce che sia i metodi di segmentazione che quelli di pinza possono essere utilizzati per misurare accuratamente i volumi delle cisti. La Figura 4 mostra una chiara differenza nel volume renale totale (TKV) tra topi di controllo abbinati all'età e topi sperimentali (Pkd1RC / RC). La visualizzazione 3D di questi rendering di volume può essere eseguita all'interno del sistema, comprese le rotazioni all'interno dello spazio 3D (Figura 5). Queste ricostruzioni 3D vengono quindi utilizzate per calcolare TKV (mm3; Figura 4) così come il singolo grande volume di cisti.
Risultati dell'analisi cardiaca
Molti parametri utili vengono acquisiti dall'analisi delle immagini in modalità M. Questi dati forniscono una buona istantanea della funzione cardiaca ventricolare sinistra (LV) in quel momento. L'output dei dati include diametro interno LV, parete posteriore LV, diametro della parete anteriore LV, frazione di eiezione, accorciamento frazionario, volume dell'ictus, frequenza cardiaca, gittata cardiaca, volume LV e massa LV. Il successo dell'analisi cardiaca dipende da un'accurata segmentazione degli strati sull'immagine M Mode. La maggior parte dei risultati cardiovascolari sono calcolati dalle fasi sistolica e diastolica di picco degli strati endocardico posteriore e anteriore. Lo strato epicardico posteriore appare bianco brillante e segue uno schema simile allo strato endocardico posteriore. Il tracciamento per lo strato endocardico posteriore deve essere posizionato sul contorno più basso. Lo strato endocardico anteriore deve essere tracciato lungo il contorno più alto di quello strato. Lo strato epicardico anteriore appare lineare nella parte inferiore dell'immagine a causa del posizionamento prono dell'animale (Figura 2D). La Figura 6 mostra un esempio di uno studio senza differenze significative nella gittata cardiaca tra topi sperimentali e di controllo. Come per l'imaging renale, è possibile la visualizzazione cardiaca 3D. Tuttavia, una visualizzazione 4D del ciclo cardiaco (Figura supplementare 1) consente allo sperimentatore di visualizzare e individuare sia le anomalie morfologiche che quelle ciclo-dinamiche nell'animale valutato.
Valutazione morfologica
Per una valutazione rapida ed economica, US può monitorare efficacemente i parametri fisiologici longitudinalmente. Tuttavia, molti studi desiderano determinare ulteriormente le caratteristiche morfologiche più fini, ad esempio il numero e le dimensioni delle cisti, le calcificazioni (calcoli renali), la vascolarizzazione o il grado di fibrosi. La Figura 7 confronta un rene di topo normale con un rene di topo cistico con un rene di topo moderatamente calcificato. Aumentando la frequenza centrale degli Stati Uniti (10 MHz con l'array lineare) a 35 MHz (amplificatore oscillatore), è possibile ottenere immagini di dettagli crescenti.

Figura 1: Sistema ad ultrasuoni e posizionamento del mouse. (A) Diagramma del sistema ad ultrasuoni e posizione dei trasduttori. (B) Vista di topi in posizione supina sulla piattaforma ad ultrasuoni. (C) Esempio di regione di interesse (ROI) in atto per area di interesse (reni) con ID animali. Fare clic qui per visualizzare una versione più grande di questa figura.

Figura 2: Imaging ecografico cardiaco per ottenere parametri fisiologici. (A) Uso dell'immagine della mappa di calore heart Finder per posizionare il trasduttore nel ventricolo sinistro per l'imaging M-Mode. La posizione del trasduttore nel ventricolo sinistro è indicata dal grande punto verde. (B) Vista del trasduttore quando posizionato correttamente sui muscoli papillari (scatola tratteggiata). (C) Esempio di visualizzazione degli strati necessari per misurare i parametri cardiaci. (D) Vista dell'immagine live in modalità M con livelli designati come nel pannello C. (Strati dall'alto verso il basso: epicardico posteriore, endocardico posteriore, endocardico anteriore ed epicardiale anteriore.) (E) Esempio di output di statistiche generate da misurazioni cardiache. Fare clic qui per visualizzare una versione più grande di questa figura.

Figura 3: Utilizzo di strumenti di segmentazione e pinze per misurare reni e cisti. (A) Segmentazioni di esempio (vista assiale) di entrambi i reni (ombreggiatura blu e arancione) e una grande cisti (gialla) con volumi elencati di seguito. Le viste non segmentate sono mostrate sotto in modo che gli Stati Uniti non oscurati possano essere visualizzati. (B) Esempio di utilizzo di pinze per misurare la stessa cisti (vista sagittale) dalla Figura 3A con le misurazioni riportate di seguito. Il volume è stato calcolato usando la formula per un'ellisse (volume = (4/3)π x a x b x c, dove a, b, c sono rispettivamente relativi x, y, z). Fare clic qui per visualizzare una versione più grande di questa figura.

Figura 4: Distribuzioni TKV di WT e reni cistici di topo. Rappresentazione di TELEVISORI per topi wild-type (WT) (C57BL/6J) e malati (Pkd1RC/RC). n = 22 (WT) n = 9 (Pkd1RC/RC); Risultati del t-test a due code: p < 0,0001. La scatola mostra valori di 25-75 percentili e i baffi mostrano un intervallo interquartile di 1,5 volte. Fare clic qui per visualizzare una versione più grande di questa figura.

Figura 5: Ricostruzione animata 3D di reni segmentati e cisti. Utilizzando il software, le proiezioni 3D dei reni e della cisti possono essere ruotate o oscillate nello spazio 3D (blu = rene sinistro; giallo = cisti grande; arancione = rene destro). Fare clic qui per scaricare questa figura.

Figura 6: Parametri fisiologici cardiaci da misurazioni statunitensi. Rappresentazione della gittata cardiaca (mL/min) per topi WT e malati (Pkd1RC/RC). n = 22 (WT) n = 9 (Pkd1RC/RC). I dati tabulati inferiori mostrano che non vi è alcuna differenza significativa per questi due gruppi nella frazione di eiezione, nel volume dell'ictus, nella frequenza cardiaca (HR) o nella gittata cardiaca (CO). Risultati del t-test a due code: p > 0,05. Box mostra valori 25-75th percentile. Fare clic qui per visualizzare una versione più grande di questa figura.

Figura 7: Confronto tra sezioni sagittali statunitensi di patologie normali e due. (A) Wild-type (ceppo C57BL/6J) rene (TKV = 143.202 mm3). (B) Rene cistico con aumento del TKV (topo Pkd1RC/RC ) (TKV = 333,158 mm3). Le cisti sono indicate da frecce gialle. (C) Rene con calcificazioni vascolari (Modello = Deficit del recettore delle lipoproteine a bassa densità, topo solo con apolipoproteina B100 alimentato con una dieta occidentale per 12 mesi5) (TKV = 127,376 mm3). I calcoli renali sono indicati da frecce verdi. Fare clic qui per visualizzare una versione più grande di questa figura.
Figura supplementare 1: Filmato del ciclo cardiaco 4D da misurazioni statunitensi. Utilizzando il software, una rappresentazione del cuore pulsante viene catturata in 3D US e proiettata attraverso il ciclo cardiaco. La freccia verde indica la valvola aortica. (Modello = Low-Density Lipoprotein Receptor Deficient, topo solo Apolipoproteina B100, alimentato con una dieta occidentale per 12 mesi5). Questo modello genera calcificazioni vascolari che consentono una più facile visualizzazione del cuore e delle valvole grazie alla maggiore riflettività acustica delle calcificazioni negli Stati Uniti. Ricostruzioni 4D simili sono possibili con topi WT; tuttavia, il contrasto acustico catturato non sarà così elevato. Fare clic qui per scaricare questo file.
Discussion
Gli ultrasuoni utilizzano onde sonore e qualsiasi barriera alla propagazione delle onde sonore interferirà con la qualità dell'immagine. Pertanto, la rimozione completa dei peli dell'area da visualizzare è fondamentale. È anche importante garantire la completa rimozione della crema depilatoria in quanto può causare ustioni / irritazioni della pelle dell'animale e scolorire la membrana trasparente dello scanner. Livelli d'acqua adeguati nelle baie sono necessari per una propagazione ottimale delle onde sonore, quindi necessari per ottenere la massima risoluzione dell'immagine. Tuttavia, quando l'animale è in posizione prona, assicurarsi che il muso dell'animale sia al di sopra del livello dell'acqua o che l'animale sia a rischio di inalazione di acqua. L'ottimizzazione dei parametri di imaging, in particolare la profondità focale, è fondamentale per ottenere immagini di alta qualità. Possono essere necessarie modifiche ai parametri per i singoli animali.
Robotic US offre molti vantaggi rispetto alle tradizionali modalità portatili statunitensi. Innanzitutto, il sistema utilizza una semplice interfaccia point-and-click basata sulla fotocamera. Questa funzione affronta la complessità degli Stati Uniti convenzionali e produce dati coerenti anche se gestito da un utente inesperto6. In secondo luogo, il sistema consente l'uso di acqua piuttosto che il tradizionale gel statunitense come mezzo acustico. In precedenza, l'uso del gel statunitense consentiva la formazione di bolle che interferivano con l'acquisizione di immagini di qualità. Inoltre, il gel statunitense è disordinato e offre sfide per la pulizia. Inoltre, l'acqua viene riscaldata dalla lampada di calore e aiuta a mantenere la temperatura corporea dell'animale. In terzo luogo, gli Stati Uniti robotici sono più veloci, quindi gli artefatti del movimento respiratorio non sono problematici. La maggiore velocità di imaging consente il completamento pratico della raccolta dati ad alto throughput. In quarto luogo, gli Stati Uniti robotici ottengono immagini 3D e quindi semplificano la ricostruzione 3D degli oggetti (Figura 4). La risonanza magnetica e altre modalità sono costose, dispendiose in termini di tempo e non sempre disponibili. È importante sottolineare che il sistema robotico statunitense si adatta a un tavolo o a una panca ed è più economico. Infine, il lavoro precedente ha dimostrato che gli Stati Uniti robotici potrebbero fornire dati di misurazione comparabili a modalità più costose, come la risonanza magnetica3.
Mentre la qualità dell'immagine e la risoluzione del sistema robotico statunitense descritto in questo lavoro erano adeguate per l'applicazione proposta (Figura 7), ci sono diversi modi in cui la qualità dell'immagine può essere migliorata in futuro. Ad esempio, l'utilizzo di trasduttori a frequenza più elevata (ad esempio, 50-70 MHz) comporterebbe immagini a risoluzione più elevata con una migliore definizione delle funzionalità. Mentre l'utilizzo di frequenze più elevate comporterebbe una minore profondità di penetrazione, le immagini dovrebbero essere sufficienti per l'imaging in vivo di organi superficiali, come il rene del topo. Come con altre modalità di imaging, gli agenti di contrasto possono essere utilizzati per migliorare caratteristiche specifiche. Per gli Stati Uniti, questo in genere significa usare qualcosa di altamente riflettente delle onde sonore. Le microbolle intravascolare in cui i lipidi circondano bolle di gas molto piccole sono uno di questi agenti. Le bolle di gas delle dimensioni di un micron sono altamente riflettenti e forniscono quindi un secondo segnale distinto che si traduce in un'alta risoluzione della vascolarizzazione7. Mentre questa tecnica di contrasto acustico può essere molto utile, può avere diversi aspetti negativi. In primo luogo, le microbolle devono essere rese fresche e persistono solo in vivo per 5-10 minuti. In secondo luogo, l'iniezione intravascolare in vivo richiede in genere il cateterismo del velo di coda per l'iniezione, e questo può essere tecnicamente impegnativo. In determinate circostanze e regimi pulsanti, l'imaging a microbolle può portare a causa di danni alla vascolarizzazione renale8.
Ci sono anche alcune limitazioni più generali del particolare sistema statunitense utilizzato. Innanzitutto, solo un array lineare (centrato a 18 MHz) è incluso nello chassis robotico, quindi il passaggio a sonde a frequenza più alta o inferiore non è attualmente possibile. Ciò può influire sull'ampiezza dei modelli (più grandi o più piccoli) che possono essere valutati con il sistema. Le future iterazioni dello strumento dovrebbero includere più array lineari per coprire l'intera gamma di modelli animali preclinici. In secondo luogo, l'angolo del trasduttore rispetto al soggetto animale non può essere controllato. Pertanto, l'esecuzione di tecniche di imaging dipendenti dall'angolo, come il Doppler, o il raggiungimento di viste alternative sul piano di alcuni organi (ad esempio, la vista dell'asse lungo del rene) richiede il riposizionamento dell'animale e può essere difficile da raggiungere. Ulteriori gradi di libertà potrebbero essere aggiunti al movimento robotico per migliorare questa sfida. In terzo luogo, a volte, abbiamo osservato artefatti di riverbero derivanti dalla membrana acustica che separa l'animale dal trasduttore che possono oscurare la visualizzazione di caratteristiche e confini superficiali. In questi casi, l'uso di un supporto in gel per sollevare l'animale lontano dalla membrana può porre rimedio alla situazione. Infine, il controllo della temperatura tramite lampada di calore è impreciso e quindi è necessario prestare molta attenzione alla temperatura corporea interna dell'animale durante l'imaging. Meccanismi di riscaldamento più controllati, come una piastra riscaldante integrata, probabilmente miglioreranno la gestione dell'omeostasi e la produttività dell'imaging.
L'uso di US robotici può essere applicabile a vari campi di ricerca. Questa tecnologia consente la visualizzazione delle strutture tissutali grossolane, quindi può essere utilizzata per tracciare la progressione del tumore e le potenziali terapie6,9, nonché la morfologia renale come qui presentata. La capacità di segmentare le caratteristiche specifiche delle immagini lo rende uno strumento interessante per lo studio di modelli di malattia del rene policistico (PKD)3. Le immagini in modalità M consentono una semplice quantificazione di molti importanti parametri cardiaci che consentono la valutazione in vivo della fisiologia cardiaca. Poiché i reni ricevono il 20%-25% della gittata cardiaca10, è importante comprendere la funzione cardiaca durante la valutazione longitudinale della patologia renale. Attraverso questi protocolli statunitensi, abbiamo cercato di illustrare che l'imaging statunitense non è solo pratico per studi renali in vivo e longitudinali, ma anche che sempre più strumenti statunitensi consentono la valutazione morfologica e fisiologica dei topi negli studi preclinici.
Disclosures
Diversi autori sono impiegati da, hanno un significativo interesse finanziario o sono co-inventori di brevetti concessi in licenza da SonoVol, Inc. (CJM, RCG, TJC).
Acknowledgments
Questo lavoro è stato sostenuto dal NIH (R43-DK126607, TJC, TLK, MFR) e dalla Mayo Foundation.
Materials
| Name | Company | Catalog Number | Comments |
| Electric Razor | Braintree Scientific, Inc | CLP-9868 14 | |
| C57bk6j | The Jackson laboratory | https://www.jax.org/ | |
| Cotton gauze pads | Fisher Scientific | ||
| Cotton tipped applicators | Fisher Scientific | ||
| Depilatory cream | N/a | N/a | This study used Nair |
| Heat lamp | Included with SonoVol Vega system | ||
| Robotic Ultrasound System | SonoVol Inc | SonoVol Vega system includes anesthesia system | |
| SonoEQ Software | SonoVol | Included with SonoVol Vega system | |
| TERRELL Isoflurane | Piramal Critical Care, Inc | NDC 66794-019-10 |
References
- Cunha, L., et al. Preclinical imaging: an essential ally in modern biosciences. Molecular Diagnostics & Therapy. 18 (2), 153-173 (2014).
- Ultrasound. NIBIB. , Available from: https://www.nibib.nih.gov/science-education/science-topics/ultrasound#pid-936 (2016).
- Beaumont, N. J., et al. Assessing polycystic kidney disease in rodents: Comparison of robotic 3d ultrasound and magnetic resonance imaging. Kidney360. 1 (10), 1128-1136 (2020).
- Hopp, K., et al. Functional polycystin-1 dosage governs autosomal dominant polycystic kidney disease severity. The Journal of Clinical Investigation. 122 (11), 4257-4273 (2012).
- Weiss, R. M., Ohashi, M., Miller, J. D., Young, S. G., Heistad, D. D. Calcific aortic valve stenosis in old hypercholesterolemic mice. Circulation. 114 (19), 2065-2069 (2006).
- Czernuszewicz, T. J., et al. A new preclinical ultrasound platform for widefield 3D imaging of rodents. Review of Scientific Instruments. 89 (7), 075107 (2018).
- Chong, W. K., Papadopoulou, V., Dayton, P. A. Imaging with ultrasound contrast agents: current status and future. Abdominal Radiology (NY). 43 (4), 762-772 (2018).
- Nyankima, A. G., Kasoji, S., Cianciolo, R., Dayton, P. A., Chang, E. H. Histological and blood chemistry examination of the rodent kidney after exposure to flash-replenishment ultrasound contrast imaging. Ultrasonics. 98, 1-6 (2019).
- Rojas, J. D., et al. Ultrasound measurement of vascular density to evaluate response to anti-angiogenic therapy in renal cell carcinoma. IEEE Transactions on Biomedical Engineering. 66 (3), 873-880 (2019).
- Boron, W. F., Boulpaep, E. L. Medical Physiology. 3rd edn. , Elsevier. (2017).
Tags
Medicina Numero 174Erratum
Formal Correction: Erratum: Use of 3D Robotic Ultrasound for In Vivo Analysis of Mouse Kidneys
Posted by JoVE Editors on 10/06/2021.
Citeable Link.
An erratum was issued for: Use of 3D Robotic Ultrasound for In Vivo Analysis of Mouse Kidneys. An author name was updated, along with the Protocol and Representative Results sections.
The name of an author was updated from:
Ryan C. Gesser
to:
Ryan C. Gessner
Step 3.1 of the Protocol was updated from:
Turn on the US machine and the heat lamp above the US platforms. Turn on the appropriate anesthesia valves for the corresponding US bays that will be used.
to:
Turn on the US machine and the switch for the internal heating element for the US bays. Turn on the appropriate anesthesia valves for the corresponding US bays that will be used.
Figue 1 in the Representative Results was updated from:
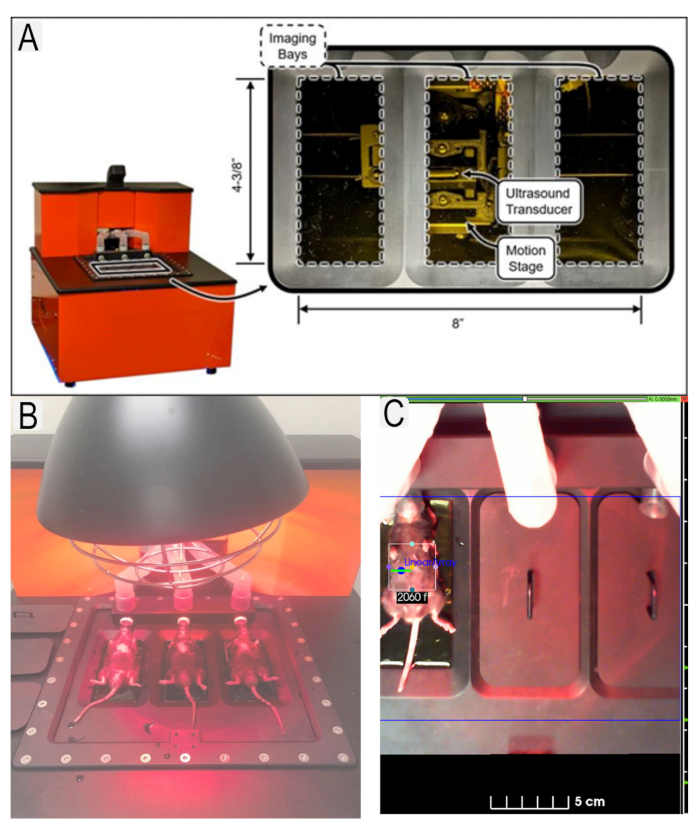
Figure 1: Ultrasound system and mouse placement. (A) Diagram of ultrasound system and location of transducers. (B) View of mice in supine position on ultrasound platform with heat lamp. (C) Example of region of interest (ROI)s in place for area of interest (kidneys) with animal IDs. Please click here to view a larger version of this figure.
to:
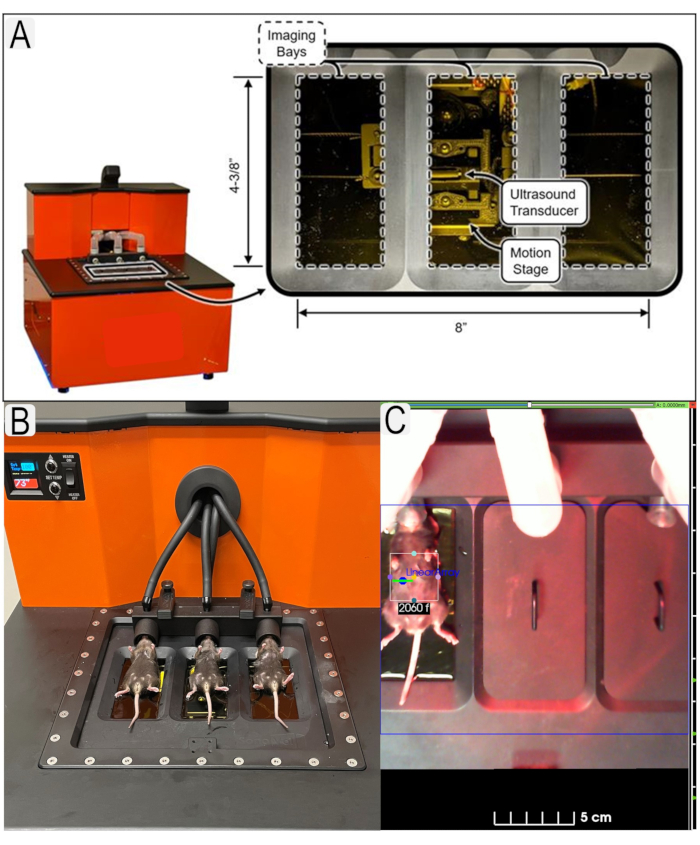
Figure 1: Ultrasound system and mouse placement. (A) Diagram of ultrasound system and location of transducers. (B) View of mice in supine position on ultrasound platform. (C) Example of region of interest (ROI)s in place for area of interest (kidneys) with animal IDs. Please click here to view a larger version of this figure.
