

Summary
该方法旨在定位垂直的地下缺陷。在这里,我们将激光与空间光调制器耦合,并触发其视频输入,以确定性地用两个反相调制线加热样品表面,同时获得高分辨率的热图像。从评估热波干扰最小值来检索缺陷位置。
Abstract
所提出的方法用于定位垂直于表面定向的地下缺陷。为了实现这一点,我们创造了被缺陷所扰乱的破坏性的干扰热波场。测量这种效应并用于定位缺陷。我们通过使用改进的投影仪形成破坏性干扰波场。投影机的原始光引擎被替换为光纤耦合的大功率二极管激光器。其光束被成形并对齐于投影仪的空间光调制器,并通过首先表征光束轮廓而优化用于最佳光学吞吐量和均匀投影,以及第二,其机械和数字校正。根据紧凑的几何情况(包括几何图像失真的校正)和检测样品表面的弱温度振荡的要求,建立了高性能红外(IR)摄像机。数据采集可以执行一次同步通过使用专门的实验装置来建立各个热波场源,扫描阶段和红外相机之间的谐波,这需要调整到被调查的具体材料。在数据后处理期间,提取关于在样品表面下存在缺陷的相关信息。从获取的来自样品表面的所谓耗尽线的热辐射的振荡部分中取出。在最终步骤中,从这些振荡的空间 - 时间形状的分析中推导出缺陷的确切位置。该方法无参考,对热波场内的变化非常敏感。迄今为止,该方法已经用钢样品进行了测试,但也适用于不同的材料,特别是温度敏感材料。
Introduction
激光投射光热法(LPPT)方法用于定位埋在试样体积中并且主要垂直于其表面定向的地下缺陷。
该方法使用了相同延伸率和频率的两个反相热波场的破坏性干扰, 如图1b所示 。在各向同性无缺陷材料中,热波通过相干叠加在对称平面上中和破坏性( 即零温度振荡)。在具有地下缺陷的材料的情况下,该方法利用瞬态热流与该缺陷之间的横向( 即面内)分量的相互作用。这种相互作用可以在样品表面上的对称线上以重现的振荡温度伸长率来测量。现在,通过叠加的热波场扫描含有缺陷的样品相对于样品位置测量温度伸长的水平。由于对称性,当缺陷穿过对称平面时,再次满足破坏性干扰条件;这使我们能够非常敏感地定位缺陷。此外,由于破坏性干扰的最大扰动水平与缺陷的深度相关,因此可以通过分析温度扫描1来确定其深度。
LPPT可以分配到有源热成像方法,一种已建立的非破坏性方法,其中主动产生瞬态加热,并且通过热红外相机测量所得到的瞬态温度分布。通常,该方法的灵敏度限于基本上垂直于瞬态热流定向的缺陷。此外,由于控制瞬态热传导方程是抛物线部分不同的中性方程式,进入体积的热流强烈衰减。因此,有源热成像方法的探测深度被限制在近表面区域,通常在毫米范围内。两种最常见的有源热成像技术是脉冲和锁定热成像技术。它们由于平面光学表面照明2而快速,但是导致垂直于表面的瞬时热流。因此,这些技术的灵敏度仅限于主要与加热的样品表面平行( 例如脱层或空隙)取向的缺陷。脉冲热成像的经验规则表明,“最小可检测缺陷的半径应该比其在表面下方的深度大至少1到2倍” 3 。为了增加垂直取向的缺陷( 如裂纹)与热流之间的有效相互作用面积,热流的方向需要改变。例如,通过使用具有线性或圆形斑点的聚焦激光器的局部激发产生具有能够有效地与垂直缺陷4,5,6,7相互作用的面内部件的热流。
在所提出的方法中,我们还使用横向热流分量来检测地下缺陷,但是我们使用热浪可以叠加的事实,而缺陷,特别是垂直取向的,可以扰乱这种叠加。以这种方式,所提出的方法类似于无参考,对称和非常敏感的方法,因为可以在远低于8,9的宽/深比下检测人造地下缺陷。到目前为止,很难建立两个提供足够能量的反相热波场。我们实现了这个b将空间光调制器(SLM)耦合到大功率二极管激光器,这使得我们能够将激光系统的高光功率与SLM的空间和时间分辨率( 见图2 )合并成大功率投影仪。热波场现在通过经投影图像的像素亮度的两个反相正弦调制线图案的光热转换来产生( 见图2 , 图1a )。这导致样品表面的结构化加热并导致明确的破坏性干扰热波场。为了找到地下缺陷,使用红外相机测量破坏推理的干扰作为表面的温度振荡。
术语热波是有争议的,因为热波不能由于热传播的扩散特性而传输能量。不过,当hea有波浪般的行为定期使用,使我们能够在实际波和扩散过程10,11,12之间使用相似之处。因此,热波可以被理解为在传播方向上高度衰减但是随时间周期性( 图1b )。特征热扩散长度 通过其材料特性(热导率k ,热容c p和密度ρ )以及激发频率ƒ来描述。尽管热波强烈衰减,但它的波浪性质可以应用于获得样品性质的洞察力。首先应用热波干涉来确定层的厚度。与我们的方法相比,干涉效应用于深度尺寸( 即垂直于表面)参考“13。通过分割激光束将干扰思想扩展到第二维度,使用热波干涉来对地下缺陷进行调整14 ,仍然以传输方式应用该方法,这意味着它受到渗透的限制此外,由于仅使用一个激光源,该方法施加了建设性的干扰,这意味着无需参考,除了使用热波干扰的想法外,第一种技术方法是空间和Holtmann 等人使用具有内置光源的未经修改的液晶显示器(LCD)投影仪进行时间控制的加热,其光输出功率受到严格限制15.Pribe和Ravichandran的进一步接近旨在增加光学通过将激光器耦合到SLM 16来输出功率, s =“xref”> 17。
通过其材料特性(热导率k ,热容c p和密度ρ )以及激发频率ƒ来描述。尽管热波强烈衰减,但它的波浪性质可以应用于获得样品性质的洞察力。首先应用热波干涉来确定层的厚度。与我们的方法相比,干涉效应用于深度尺寸( 即垂直于表面)参考“13。通过分割激光束将干扰思想扩展到第二维度,使用热波干涉来对地下缺陷进行调整14 ,仍然以传输方式应用该方法,这意味着它受到渗透的限制此外,由于仅使用一个激光源,该方法施加了建设性的干扰,这意味着无需参考,除了使用热波干扰的想法外,第一种技术方法是空间和Holtmann 等人使用具有内置光源的未经修改的液晶显示器(LCD)投影仪进行时间控制的加热,其光输出功率受到严格限制15.Pribe和Ravichandran的进一步接近旨在增加光学通过将激光器耦合到SLM 16来输出功率, s =“xref”> 17。
本文介绍的方案描述了如何应用LPPT方法来定位垂直于钢样品表面定向的地下缺陷。该方法处于早期阶段,但足够强大以验证拟议的方法;然而,在实验装置的可实现的光输出功率方面仍然受到限制。由于光输出功率的增加仍然是一个挑战,所提出的方法适用于含有人造放电加工缺口的涂层钢。然而,协议的最重要和最关键的步骤,产生均匀的结构化照明,满足破坏性热波干扰的先决条件,以及定位缺陷,仍然适用于更严格的缺陷。由于控制量是热扩散长度μ,LPPT方法也可应用于许多不同的材料。
NT“>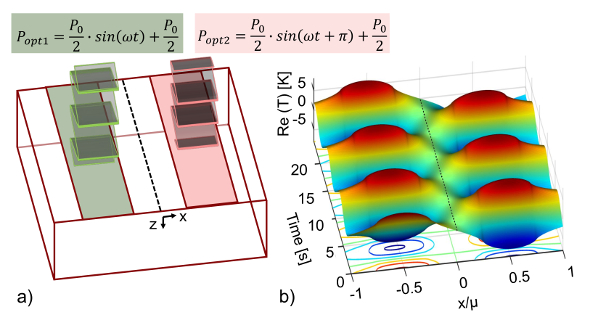
图1:破坏性干扰效应原理。 ( a )实验中使用的照明图案的示意图。样品在空间和时间上加热了相位移π的两个周期性照明图案。虚线表示两个图案之间的对称线。这条线将用作“耗尽线”的评估。 ( b )从热传导方程的分析解算出的空间和时间分辨的交替热结果图。它显示了对于(a)具有P opt 1 = 1.5W sin(2π0.125Hz t )+ 1.5W和P opt 2 = 1.5W sin(2π0.125Hz t )的两种图案的照度的响应热波+π)+ 1.5 W用于结构钢ρ 3 , c p = 461J /(kg·K), k = 54W /(m·K)。虚线处的温度曲线显示均匀的各向同性材料的热振荡。 请点击此处查看此图的较大版本。

图2:主动热成像中使用的结构化加热的测量原理示意图。将均匀化为顶帽型材的高斯光束施加到空间光调制器(SLM)。 SLM通过其可切换元件在空间上解决光束,并通过其切换速度暂时解决光束。每个元素表示SLM像素。在本实验中,SLM是数字微镜装置(DMD)。通过用时间确定性控制软件调制像素亮度A ,样品表面以结构化的方式加热。在所提出的实验的情况下,我们调制两个反相线(相位:φ= 0,π),它们是角频率ω处的相干干扰热波场的起源。波场与样品的内部结构相互作用,也影响表面的温度场。这是通过中波红外摄像机的热辐射来测量的。 请点击此处查看此图的较大版本。
Subscription Required. Please recommend JoVE to your librarian.
Protocol
注意:注意:请注意激光安全,因为设置使用4级激光。请戴上正确的防护眼镜和衣服。另外,小心处理飞行员激光。
将二极管激光器耦合到投影仪开发套件(PDK)
- 准备面包板。
- 将所有设备预装配到面包板, 如图3所示 。将所有预装的设备放在激光实验室中。
- 将激光光纤安装在面板上。
- 将光纤连接到激光光纤安装座( 参见 图3 )。
- 开关二极管激光器的快门和激光阈值。通过使用高功率红外传感器卡,检查光束的输出直径(40 mm)。关闭激光阈值并打开导频激光。通过使用将激光光纤安装光轴的高度调整到PDK的入口实验室插孔( 参见 图4a,4d )。
- 沿着导轨移动激光光纤安装座。观察导频激光器在一定距离处的位置。它的中心点不应该移动。如果是,请检查实验室插孔和激光光纤安装座之间的安装位置。之后修复激光光纤安装。
注意:轨道是光轴的参考点,并且应平行于面包板对齐。望远镜镜头必须事先取下。
- 调整望远镜。
- 使用望远镜将光束直径从40 mm减小到15 mm,以适应PDK的入口( 参见 图4a,4d )。分别使用200mm和75mm平凸透镜作为第一和第二透镜。使用飞行员激光和十字准线来定位第一个镜头( 参见 图4b )。
- 使用钢尺大致调整两个镜片之间的距离。再次使用十字准线将镜头定位到飞行员激光器。将第二个镜头安装到xy平台上。使用舞台准直光束。
- 对准采样器。
- 以45°的角度点击(用激光束)光束采样器。使用垂直于第一个的第二个导轨定位光束采样器。
注意:大多数光功率由500 W功率计冷却。二极管激光器的光输出在全功率下更稳定,这就是光功率分解的原因。 - 使用高度固定的柱子中的虹膜通过导频激光器检查轨道上的光路路径( 参见 图4a )。
- 以45°的角度点击(用激光束)光束采样器。使用垂直于第一个的第二个导轨定位光束采样器。
- 对准镜子
- 在对准如图4c所示的镜子之前,取下PDK及其底板。固定垂直于第二根导轨的第三根导轨。再次,通过虹膜检查光路。
注意:光路s必须与导轨方向对齐。光束应准直。
- 在对准如图4c所示的镜子之前,取下PDK及其底板。固定垂直于第二根导轨的第三根导轨。再次,通过虹膜检查光路。
- 拆卸和定位PDK。
- 在定位PDK 18之前,请取出原始的光引擎。
注意:有两个原来的镜头最初准直PDK 19的LED( 参见 图4d ,入口)。它们被胶合,需要使用丙酮去除。 - 将PDK的平台与第三轨平行,从而与光束的光轴对齐。使用调整到PDK入口的十字准线相对于光束定位PDK。保持对齐平行。关闭导频激光,因为它太弱,不能通过PDK。
- 在定位PDK 18之前,请取出原始的光引擎。
- 投影一个白色图像,以检查光功率。
- 确保PDK的HDMI电缆和USB电缆以及数据采集(DAQ)卡已连接到控制PC。将激光控制盒上的“激光快门”,“激光阈值”和“激光打开”端口连接到DAQ卡。将控制箱扫描仪的“激光控制电压”端口连接到DAQ卡。
- 启动PDK控制软件20 ,并按照图5b的步骤i.1至i.3将其配置为普通投影机。启用第二个屏幕,并确保第二个屏幕中没有窗口。使用白色桌面背景,并使用LED闪光灯作为输入光源检查投影机的功能。
注意:如果将白色图像投影到PDK的图像平面,则设备正常工作。
- 检查光输入功率。
- 将30瓦功率表头连接到功率计控制单元的PDK前面的光路中( 参见 图4e - 位置1)。切换二极管激光器在步骤i.1 = 0.5V的低功率水平下,按照图5a的步骤i.1至i.3的LPPT激光控制软件。
注意:LPPT激光控制软件切换切换激光控制输出的DAQ卡( 参见 1.7.1)。考虑激光安全,戴眼镜和防护服! - 使用大功率红外传感器卡检查功率计传感器位置。将红外线卡插入光束并观察它发光。将光束直径与功率计传感器区域匹配( 图3 )。
- 检查PDK入口处的最大光输入功率(再次如图5a ),步骤i.1),值为10 V.
注意:PDK入口处的光输入功率最大应在22 W 21左右。在这种配置下,可以容忍5分钟以下的测量时间,而不会破坏SLM,这在PDK实现为数字微镜器件(DMD)的情况下。 - 检查光输出功率。
- 使用附在PDK物镜上的af = 60 mm镜头将30 W功率计头距离距离PDK约60 mm。( 参见 图4e )。
- 将LED闪光灯定位在投影机的入口处( 参见 图4d )并将其打开。微调功率计头部的位置,使其收集投影图像的光, 如图4e所示。之后取下LED闪光灯。
- 启动LPPT激光控制软件。在“电压”字段中输入“0.5 V”,然后单击“激光开”!按钮。从功率计控制单元读取光功率。点击“停止”按钮停止激光。重复这些步骤2 V,6 V,10 V( 参见 图5a ,i.1至i.3)。
注意:如果10 V的电压提供“#62; 4 W,初始测试成功。否则,需要检查光学对准。尝试通过精细调整镜子来最大化光输出功率。
- 测量光束轮廓。
- 使用带放大器和针孔的光电二极管来测量所得投影图像的光束轮廓( 参见 图4f )。如果光束轮廓仪可以访问,请使用此设备,但会削弱光束。
- 将光电二极管连接到本身安装到支架的平移台。还将中性密度(ND)1反射滤光片和1毫米针孔连接到二极管。将光电二极管放置在电动平移台和实验室插孔的顶部。要获得高度,请使用两个面包板(100 mm x 100 mm)。
- 在PDK目标( 参见 图4e )后使用af = 100 mm镜头,并使用LED闪光灯投射白色图像( 参见步骤1.7)。将光电二极管移动到图像平面确保在平移阶段移动的光电二极管的范围在投影图像之内( 参见 图4f )。
- 将光电二极管连接到电源和DAQ卡。对于6激光功率的6 V控制电压,使用40 dB放大。将电动平移台的运动控制器连接到控制PC。
注意:LPPT强度软件以v = 0.1 mm / s的恒定速度控制针孔光电二极管通过照明区域的移动,并将光电二极管信号记录在100 kHz。激光也通过软件控制。 - 如图4f所示,以1 mm的步长使用台式千分尺螺丝,以扫描图像。 见图6a-6b所示的结果。
- 计算校正图像。
- 为了校正光束轮廓的不均匀性,计算关于光束的反转像素矩阵个人资料。使用边缘检测算法识别投影图像的范围。
- 使用舞台速度将时间信息转换为空间信息。将空间信息转换为具有x = 1,024像素和y = 768像素的PDK的像素域。将二极管信号归一化为最大值。
注意:使用所有归一化图像值的平均值选择校正的参考水平。衰减电平用以下公式计算:
P 像素是每像素的归一化二极管强度。高于1的像素LC的值设置为1。 - 将校正矩阵( 参见 图6c )与白色图像相乘,并再次测量轮廓,以便检查校正是否足够( 参见 图6e-6h )。
2.准备样品
- 将30瓦功率表头连接到功率计控制单元的PDK前面的光路中( 参见 图4e - 位置1)。切换二极管激光器在步骤i.1 = 0.5V的低功率水平下,按照图5a的步骤i.1至i.3的LPPT激光控制软件。
- 使用100mm×100mm×40mm的施工钢St37的两个块作为样品材料,密度为ρ = 7,850kg m -3 ,热导率k = 54W·m -1 ·K -1 ,热容的c p = 461 J·kg -1 ·K -1 。
- 如图7所示,通过在表面下方进行放电加工,将人造缺陷插入0.25mm,0.5mm,0.7mm,1.25mm和1mm,1.5mm,1.75mm,2mm的两个块中。
- 用保护胶带将缺陷胶带。喷砂表面以达到均匀的吸收。涂覆前用保护胶带将缺陷胶带。使用丙酮对表面进行脱脂。
- 用30毫米距离的石墨喷雾涂覆照明区域两次(0°和90°)。如果有均匀的表面,涂层是成功的。如果涂层不完整,请再次开始脱脂和清洁并重复涂层步骤。干燥表面〜2 h。不要碰面,会改变发射率。
- 取下胶带,确保石墨不会进入地下缺陷。

3.准备实验
- 准备PDK和二极管激光器。
- 投影如图1.7所示的白色图像。按照步骤1.8)中的说明检查PDK的光输入功率。检查PDK的光输出功率,如步骤1.9)所示。
- 将500W功率计头连接到功率计控制单元,并通过USB电缆将功率计连接到控制计算机(PC)。
- 准备运动控制器并定位样品。
- 通过USB电缆将运动控制器连接到平台和控制计算机。将平移台正对于光轴定位在相对于PDK约80mm的距离处。
注意:LPPT软件e,在控制计算机上运行控制运动控制器。 - 将f = 100 mm镜头连接到PDK物镜。使用LED闪光灯作为输入光源( 参见 图4d ,十字准线将入口标记)到PDK以找到投影机的图像平面。
- 将一张白色纸张放置在物体前方大约100 mm的距离处,并将其前后移动,以找到作为图像平面的锐利照明矩形的平面。
- 将涂层样品表面置于该平面。使用安装在线性平移台上的实验室插座设置样品的高度。选择高度,使得照明矩形的顶部位于样品的顶部( 参见 图4g )。将缺陷定位在照明区域的范围内。
- 通过关闭设备并重新打开,使运动控制器置零。
- 通过USB电缆将运动控制器连接到平台和控制计算机。将平移台正对于光轴定位在相对于PDK约80mm的距离处。
- 准备相机并定位金镜。
- 使用LED闪光灯作为投影机的输入光源,将白色图像投影到样品。
- 将金镜放在高度,使其看到样品的上边缘( 图4g )。将镜子设置在大约35°的角度, 如图3所示 。将金色镜子尽可能靠近PDK物镜,但不会影射投影。
注意:镜子连接到已安装的支架的柱子上。高度和位置通过夹具固定。 - 将红外摄像机安装到三脚架上。用红眼级别对红外摄像机进行等级。将红外摄像机调整到PDK物镜的高度。定位它,使其在金镜上看到投影的白色图像。
注意:沿光路的近似距离约为1米。 - 在IR摄像机物镜和红外摄像机之间使用间隔环。使确保摄像机的触发输入连接到测量数据采集卡,以触发帧抓取。此外,通过LAN电缆将红外摄像机控制PC连接到红外摄像机。
- 打开相机并至少等待预热时间( 约 30分钟)。
- 启动红外摄像机控制软件。将菜单栏项目更改为“相机”。点击“连接”按钮连接红外摄像机( 参见 图8a ,步骤i.1)。
注意:相机显示场景的实时图像。 - 单击“远程”按钮打开面板“遥控器”( 参见 图8d ,步骤i.2)。选择校准“HF 100mm(-10°C - 60°C)1140μs”。参见图8d ,步骤i.2.1。
注意:校准范围应尽可能小,以减少噪音。 - 手动调整镜头对焦环,将红外摄像机对准e采样平面。
注意:摄像机的视场与最大投影面积一样重要,以获得最大的空间分辨率( 参见 图4g )。可能需要改变红外摄像机的位置,高度和方向。为了确定图像是否清晰,需要在图像平面上进行温度对比。可以使用钢尺来产生对比度。如果IR图像仍然具有较低的对比度,可以使用选择工具进行调整( 参见 图8c ,i.3) - 通过点击“NUC”按钮执行非均匀性校正( 参见 图8d ,步骤i.2.2)。盖上红外摄像机目标,然后点击“确定”按钮。
- 确定红外摄像机像素域与投影机坐标之间的关系。
- 确定PDK像素域,红外相机像素域和le之间的关系通过将白色图像或图案投射到样品表面( 参见 图4g,h ),样品的标度。通过使用给出PDK域与样品长度尺度之间的关系的钢尺来测量投影面积。
- 使用连接到PDK物镜的f = 100 mm透镜,以获得21.3 mm x 16 mm(4:3)的照明面积。
注意:PDK坐标中的长度刻度为:1个投影像素= 21.3 mm / 1,024像素 - 找到PDK和IR相机之间的关系。重复步骤1.9.3)10 V.
- 使用红外摄像机软件将菜单栏项目更改为“测量”。从“测量区域”工具栏( 参见 图8c ),步骤i.4)中选择“十字工具”。点击所显示的框架,标记所产生的热图像的拐角。
- 右键单击十字架到达属性窗口。更改为“坐标”并记录它们随后将热图像转换为PDK坐标系。
4.实施实验
- 准备实验。
- 估计照片面积相对于样品的长度尺度。
- 使用f = 100 mm镜头获得5.5 mm x 16 mm每个图案的照明区域。选择不亮的5.5 mm x 16.5 mm的区域。
注意:所得的辐照度约为1.2W / cm 2。
- 使用f = 100 mm镜头获得5.5 mm x 16 mm每个图案的照明区域。选择不亮的5.5 mm x 16.5 mm的区域。
- 以相对于PDK像素域的单位估计照明面积。
- 使用步骤3.4.2)中的等式将照明图案位置转换为PDK的像素域(1,024像素×768像素)。使用[(512,1); (512,768)]像素作为耗尽线,其在两个图案之间是对称的。
- 计算总帧数,测量时间和帧per期。假设v = 0.05mm / s的速度, x = 10mm的台行程距离和PDK帧速率f = 40Hz,通过t = x / v = 200s计算测量时间t。此外,计算帧的数量ƒ=ƒr• t = 8,000。在f = 0.125 Hz的激励频率下,用p = noƒ/ tƒ= 320帧/周期计算每周期p的帧数。
注意:这些值将用于生成投影图像。 - 检查设置,并确保激光系统,红外摄像机和(可选)温度控制器连接到DAQ卡。检查500W功率计,PDK和线性级是否连接到控制PC。
- 估计照片面积相对于样品的长度尺度。
- 设置相机控制PC。
- 当红外摄像机接收到触发输入时,将红外摄像机控制软件配置为抓住一帧。为此,向面板“相机”的女巫,然后单击“远程”按钮( 参见 图8a ,步骤i.2)打开遥控面板。从下拉菜单中选择“进程IO”( 图8d ,步骤i.2.3),并启用“同步输入”和“门”,并关闭菜单。
- 通过单击“采集参数”选项卡的右下角打开采集菜单( 参见 图8a ,i.5)。从下拉菜单中选择“Ext / Sync”( 参见 图8b ,i.5.1)。通过在“文件夹”字段中输入文件和文件夹名称来命名测量值( 见图8b ,i.5.2)。
- 将从步骤4.1.3计算的总帧数输入“计数”字段( 参见 i.5.3)。关闭采集菜单,然后单击“记录”按钮开始红外摄像机数据采集( 参见 图8 ,i.6)。
注意:只有当DAQ卡有触发输入时才会进行录制。
- 进行实验。
- 启动LPPT控制软件。单击“激活?”激活运动控制器按钮( 图9a ,i.1)。通过编辑相应的命名字段来设置行程参数“StartPosition”=“-5 mm”,“EndPosition”=“5 mm”和“Velocity”=“0.05 mm / s”, 如图9a ,i.1所示。单击“开始测量”按钮(参见图9a ,i.2)。
注意:如果不清楚缺陷在哪里,请以更高的速度选择较大的行驶距离。注意PDK的温度升高和创建的数据量。请注意,将出现用于生成帧图像的用户界面( 参见 图9b )。 - 生成投影帧图像。 <OL>
- 左键单击“选择区域颜色”字段。从颜色对话框中选择图案区域的颜色( 图9 ,i.3)。从左上角的绘图工具栏中选择“矩形工具”。
- 在图像区域上方左键单击并保持时,在图像区域上绘制一个矩形。使用步骤4.1.2)中的转换后的图案坐标来调整左下角(i.4)中显示的矩形坐标。点击“定义区域”按钮( 图9b ,i.5)。
注意:5.5 mm图案大小的PDK域中计算的像素坐标为:矩形1(x1 = 116,y1 = 1; x2 = 380,y2 = 768),矩形2(x1 = 644,y1 = 1; x2 = 908,y2 = 768)。单击“定义区域”按钮后,将出现一个设置模式属性的对话框。
- 启动LPPT控制软件。单击“激活?”激活运动控制器按钮( 图9a ,i.1)。通过编辑相应的命名字段来设置行程参数“StartPosition”=“-5 mm”,“EndPosition”=“5 mm”和“Velocity”=“0.05 mm / s”, 如图9a ,i.1所示。单击“开始测量”按钮(参见图9a ,i.2)。
- 设置模式属性( 图9c ,i.6)。
- 从中选择“正弦波”左键单击“信号类型”字段的下拉菜单。通过将“相移”字段设置为“0°”,“频率”至“0.125 Hz”和“幅度”为“127”(第一种图案的相移为0,π相位移为π,可定义振荡参数)第二)。
- 将“10”插入“电压”字段,将激光电压设置为10 V。使用步骤4.1.3的值将320粘贴到“Pics / period”字段。按“下一步”按钮;这将关闭面板。
注意:LPPT控制软件以PDK的分辨率计算周期性图像流。作为白色像素,意味着最大光功率和黑色像素零功率,计算出两个振荡模式。第一模式的灰度值用P 1 = 127sin(2π0.125 Hz t )+ 127计算,第二模式的灰度值用P 2 = 127 sin(2π0.125 Hz t+π)+ 127(参见图2 ,曲线图),而时间t离散化为所选择的帧速率( 参见步骤4.3.4)。
- 创建第二个投影模式。
- 按照图9的工作流程重复步骤4.3.2)和4.3.3),但具有不同的颜色和“180°”的不同“相移”。单击“计算框架”按钮计算投影模式。在弹出的对话框中设置PDK和IR摄像机帧速率为“40 Hz”。
- 加载校正图像。
- 按照图9b的工作流程,步骤i.12。选择“加载校正”面板,并从步骤1.11提供计算图像的文件)。单击按钮加载校正图像。
- 通过单击“开始”按钮开始测量( 参见 图9b ,步骤i.13)。
注意:当舞台移动时,计算的帧将投影到样本上。这些框架将被红外摄像机控制软件采集和计数。 - 通过单击“停止测量”按钮( 参见 图9a ,i.14)获取所有帧(进度条= 100%)时停止测量。
注意:如果点击,按钮的标签将会更改。
5.后处理数据文件
- 启动LPPT后处理软件。单击“加载”按钮,在文件对话框中选择测量文件。单击“确定”将相机数据格式转换为后处理数据格式( 参见 图10a )。
注意:IR摄像机数据以本机格式存储在IR摄像机控制PC上。 IR摄像机控制软件开发套件用于将IR摄像机序列转换为3维矩阵(像素X,像素Y,帧号)和头部包括定时向量t。 - 通过将步骤3.4.3中的四个投影点P1x至P4y的坐标插入,并点击“变换”,将红外相机数据转换为PDK域( 参见 图10b )。
注意:由于通过金镜到红外摄像机的图像投影( 参见 图4g ),所得的IR图像失真。从IR摄像机域到PDK域执行仿射几何变换。结果是大小为1,024×768×帧数的矩阵。 - 在耗尽线提取温度信息( 参见 图10c )。
- 通过填充像步骤4.1.2中已经选择的字段L1x = Lx2 =“512”像素来定义具有两点L1和L2的耗尽线。从L1y =“343”选择y到L2y =“393”。参见图10c 。
注意:由于步骤5.2)中的转换,数据可以是立即收回,但副作用发生是因为样品仅部分照亮。因此,不要评估图案的边缘区域。如果噪音仍然太高,可以增加y的大小。 - 通过填充以下字段来设置IR摄像机的实验参数:FrameRate为“40”Hz,频率为“0.125”Hz,速度v为“0.05”mm / s,起始位置x开始为“-5”mm( 参见 图10c )。设置数据后处理的参数:“Fit Degree”=“7”,“Smoothing”=“20”,“Hilbert”=“500”, 如图10c所示 。
注意:在耗尽线提取的数据是几何平均的。之后,通过执行多项式拟合(Fit Degree)来检索交替温度项ΔT( 见图11a,b )。所得到的信号由移动平均滤波器(Smoothing)平滑。最后,应用希尔伯特变换来检索瞬时振幅。应用另一个移动平均滤波器(希尔伯特)以减少残余波纹。使用关于振幅最小值的信息,获得隐藏缺陷的位置。 - 单击“评估”执行数据分析。从“CrackPosition [mm]”字段读取缺陷的计算位置,缺陷位置如图10d所示 。
- 通过填充像步骤4.1.2中已经选择的字段L1x = Lx2 =“512”像素来定义具有两点L1和L2的耗尽线。从L1y =“343”选择y到L2y =“393”。参见图10c 。

图3:具有突出显示光路的实验装置的照片(红线)。激光光纤安装座连接到二极管激光器的光纤上。光束由望远镜调整到PDK的入口直径。在进入PDK之前,光束被光束采样器分割并由功率计监视。在PDK内部,梁均匀化a并预测到DMD。由LPPT控制软件控制的PDM向样品投射照明图案。投影光被光热转换并加热样品。通过红外摄像机通过从样品表面发射的热辐射(橙线)测量温度。样品本身位于线性平移台上。 请点击此处查看此图的较大版本。

图4:显示实验设置调整的照片序列。 ( a )实验装置的顶视图显示了一个概述。 ( b )望远镜的对准:十字准线用于将透镜对准激光束的光轴。 ( c )校准光学元件:棒系统安装d到光学台用于对准光束相对于工作台。高度固定的虹膜用于保持光束平行于工作台。 ( d )投影机和光束之间的耦合点的侧视图。十字准线用于将投影机对准光束。 ( e )确定投影机系统的传输:功率计用于测量投影机前后的光功率。 ( f )光束轮廓的确定:针孔和ND1滤光片安装在二极管上,二极管通过投影图像通过两个线性级移动。投影机必须配置为投影白色图像。 ( g )通过金镜将红外摄像机定位到样品:样品必须放置在投影机的图像平面中。为了控制功率密度,可以使用附着在物镜上的物镜和附加透镜。 ( h )测定投影图像,红外摄像机图像与样本的实际长度之间的比例。 请点击此处查看此图的较大版本。

图5:软件截图。 ( a )LPPT激光控制软件的屏幕快照。 ( b )PDK控制软件:步骤i.1至i.3显示如何将PDK配置为普通投影机。 请点击此处查看此图的较大版本。

图6:不均匀波束剖面的校正。 ( a )由a拍摄的投影白色图像(全光照)的光束轮廓光电二极管被移动通过轮廓。数据显示在中间具有突出峰的不均匀的波束分布。 ( b ) a )中对应于红线的横截面线轮廓。 ( c )用投影的白色图像覆盖在SLM上的校正图像,以便降低不均匀性的水平。 ( d )c)中红线的相应截面线剖面。 ( e )校正后的结果光束轮廓显示更接近顶帽型材的轮廓。 ( f ) e )中红线的相应截面线剖面。 ( g )两个校正图案的照明曲线。这些图案将以相同的频率和幅度进行调制,但是相反的相位在图案之间产生相互干扰的区域。 ( h )红线的相应横截面线轮廓在g)中。 ve.com/files/ftp_upload/55733/55733fig6large.jpg“target =”_ blank“>请点击此处查看此图的较大版本。

图7:样品制备。 ( a )样品表面的照片,示出黑色涂层结构钢St37(20mm×0.5mm×15mm)的块。 ( b )透明CAD绘图的地下缺陷。缺陷位于距离右侧40mm处。 ( c )样品的侧视照片显示在表面下方不同深度(侧面1 = 0.25mm,侧面2 = 0.5mm,侧面3 = 0.7mm,侧面4 = 1.25mm)的理想化缺陷。样品侧未涂覆,以减少热损失。第二个样品(未示出)在其侧面1 = 1mm,侧面2 = 1.5mm,侧面3 = 1.75mm,侧面4 = 2mm处具有其下表面缺陷。=“_ blank”>请点击此处查看此图的较大版本。

图8:红外摄像机控制软件的截图。步骤i.1至i.5显示如何配置红外摄像机进行数据采集。 ( a )“相机”面板的屏幕截图:红外摄像机可以通过“连接”按钮连接到红外摄像机控制PC。从这里可以到达“远程”控制面板(b)和采集面板(d&e)。此外,可以通过“记录”按钮开始测量。 ( b )“采集”面板的屏幕截图:需要通过“外接/同步”配置红外摄像机,以便在接收到5 V TTL触发时捕获帧。 ( c )“测量”面板的屏幕截图:可以通过“选择”按钮调整数据显示范围。点和线工具用于将IR摄像机图像校准为真实世界坐标。 ( d )红外摄像机遥控器“校准”面板的屏幕快照。必须选择小的测量范围(-10至60°C)才能实现高灵敏度。 ( e )红外摄像机遥控器:必须启用“进程IO”,“IN1”和“IN2”才能触发红外摄像机。 请点击此处查看此图的较大版本。

图9:LPPT控制软件的截图。用户与软件交互的工作流程标记为步骤i.1至i.14。 ( a )LPPT主面板的屏幕截图; “活性?”是一个布尔类型,如果为真,则激活舞台。 “Start-”和“EndPosi”“速度”定义为mm / s,“开始测量”按钮开始测量,打开面板(b)中所示的对话框,如果为假,则停止测量。 ( b )用于创建投影到样本的图案的用户界面的屏幕截图,选择一种颜色来表示像素区域,通过绘制矩形来选择该区域,如果按下“定义区域”按钮,面板(c)中所示的面板将弹出以定义该区域的属性,定义所有区域后,“计算帧”按钮将计算一组图像,“加载修正”将提供一个加载校正的对话框图像,以避免不均匀的光束轮廓,按钮“开始”将开始测量;( c )用于设置一个图案属性的用户界面的屏幕截图,上框显示信号类型(正弦波),相移以Hz为单位的度数和频率。下框架显示每周期的帧数,振幅从1到127,激光电压(0 V至10 V = 0 W至500 W)。每个周期的帧是代表一个周期离散化程度的值。按下“下一步”(进一步)按钮后,会弹出一个对话框,并以Hz为单位要求相机帧速率和以Hz为单位的帧切换速度。 请点击此处查看此图的较大版本。

图10:LPPT后处理软件的截图。 ( a )加载和转换本机红外相机数据格式。 ( b )通过使用变换点P1x〜P4y将帧矩阵变换为投影仪坐标系。 ( c )L1x至L2y表示评估线的像素坐标。 &#34; v“,”xStart“,”FrameRate“和”频率“是实验参数,”v“是以mm / s为单位的速度,”xStart“起始位置为mm,”FrameRate“ “Fit Degree”,“Smoothing”和“Hilbert”是评估参数,Fit Degree表示多项式拟合的程度,“Smoothing”表示用于减少噪声的移动平均滤波器的元素数, “Hilbert”参数用于设置平滑度以找到曲线的最小值( d )显示裂纹位置为垂直虚线的结果的截图, 请点击此处查看此图的较大版本。
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
按照方案,选择具有0.25mm深度的地下缺陷的钢样品的侧面1以产生代表性的结果。该缺陷最初位于照明区域的中心附近。然后将样品通过线性级以0.05mm / s的速度从-5mm移动到5mm。使用这些参数, 图11a显示了从耗尽线提取扫描数据后的扫描数据。在这个阶段,可以估计实验的成功,因为可以从IR摄像机控制软件获得原始数据作为预览(可选:使用线工具预览数据, 参见 图8 ,步骤i.4) 。进一步信号后处理后, 图11b示出了在0.3mm处的希尔伯特曲线(蓝色)的最小值处的缺陷位置。
为了验证实验,曲线应该h具有以下属性:它应该是对称的,在对称平面处具有显着的最小值,并且在其左右两个具有相等的最大值。最大值出现是因为来自一个线源的热流由于在缺陷处的热积累而在另一个之上占主导地位。当缺陷靠近对称平面定位时尤其如此。缺陷形成热流的障碍,因此我们可以观察到主导源的热流及其从缺陷的反射。如果缺陷在中间对称放置,则热流平均分开,最小值为1 。
扫描速度的影响如图11c所示。这里,将扫描速度加倍至0.1mm / s以评估相同的缺陷。之前,样品在舞台上略微移动,以获得不同的相对位置。确定缺陷位置为-2毫米。伸长水平类似于图11a所示的数据,证实了实验的良好重复性,但振荡较少。由于最大伸长率与缺陷的深度相关,所以关于位置和深度的信息也可以保持1 。
图11d显示了次优数据集。缺陷在表面以下1mm,几乎处于该扩散长度的检测极限和可用光功率。虽然仍然可以确定缺陷的位置,但是由于零振荡的位置已经受到噪声的影响,因此测量不确定性较大。从这种行为,我们可以推断,缺陷检测实验失败的最明显的迹象是如果消耗线完全消失或者存在强不对称行为。这可能是由于follo(i)红外摄像机的空间分辨率不够,耗尽线无法正确解析,(ii)相机的噪声与温升相比太高,(iii)照明模式为(iv)与照明图案的调制频率相比,所选择的舞台速度太高,(v)热扩散长度(经由调制频率)不适应于缺陷深度。

图11:实验定位地下缺陷的代表性数据集。 ( a )来自St37样品,侧面1的代表性实验数据,其深度为0.25mm处具有缺陷。黑线显示随时间的温度信息(上轴)。通过以v = 0.05mm / s的速度平移舞台,位置是检索(底轴)。红色曲线显示用于获得交变温度分量的多项式拟合(7度)。虚线红线表示地下缺陷的位置;( b )黑色曲线表示从面板(a)的温度数据中减去多项式拟合得到的交变温度图。通过将黑尔伯特变换应用于黑色曲线并求平均得到蓝色曲线。 ( c )以0.1mm / s的阶段速度在-7mm至3mm的范围内的相同侧的代表性实验数据。频率减半,但延伸率类似于图(a)。 ( d )当地下缺陷处于1mm深度时获得的次优实验数据。 请点击此处查看此图的较大版本。
Subscription Required. Please recommend JoVE to your librarian.
Discussion
所提出的协议描述了如何定位垂直于表面定向的人造地下缺陷。该方法的主要思想是产生与地下缺陷相互作用的干扰热波场。最重要的步骤是(i)将SLM与二极管激光器组合,以便在样品表面产生两个交替的高功率照明图案;这些图案被光热转换成相干热波场,(ii)让它们在与地下缺陷相互作用的同时被破坏性地干扰,以及(iii)使用热成像从样品表面的动态温度的表面扫描中定位这些缺陷红外摄像机由于只需要相对的温度周围温度变化平均值而不是绝对温度值,这种方法对隐藏的缺陷非常敏感1 。
最关键的步骤之一在协议中是为了在使用SLM耦合的激光源进行结构化加热时建立足够的照明光束分布均匀性(参见步骤1.10)。二极管激光器提供高辐照度,但必须以正确的光束直径和方向性将其馈送到包含SLM的投影机中。由于投影机内专有光路的轻微不可避免的几何和频谱不匹配,样品上产生的图像失真。因此,通过参考光束轮廓测量来执行控制投影图像的图像强度值的数值校正。成功实验的第二个关键步骤是实现IR图像的高空间分辨率(参见3.3.7- 3.3.8)。耗尽区必须足够空间解决,否则不会耗尽,因此无法测量缺陷位置。
所施加的热波的性质是类似扩散的过程导致其振幅在几毫米以上的强烈衰减。我们通过使用大功率二极管激光器作为光源来满足这种固有的物理限制。当前实验装置的瓶颈是SLM 21的热应力极限,这意味着只能使用一部分可用的激光功率。我们目前的解决方案是用黑色石墨涂层涂覆样品表面。将来,我们期望使用优化的光引擎或甚至可切换的直接激光阵列(如高功率垂直腔表面发射激光器(VCSEL)阵列22 )具有更高灵敏度的设置。
这种方法与非破坏性测试中现有热成像的主要区别在于我们使用完全相干热波场的破坏性干扰;这只有在控制一组个体li的幅度和相位之后才可能确定性的方式。在现有的热成像方法中,使用在时域中控制的平面光源或在空间域中控制的单个聚焦激光光斑。我们的方法的主要优点是对垂直于样品表面的缺陷具有高灵敏度。
到目前为止,只有两个单独的光源已经被创造出来。通过激光耦合SLM,我们原则上可以在样品表面上生成和控制高达一百万个单独的光源 - 一百万个热源。显然,这种方法开创了长期的任意热波整形的可能性,并将物理极限内的超声波或雷达传输技术转移到主动热成像领域。一旦如上所述的辐照度挑战( 即每个投影像素的光功率)被令人满意地解决,位于更深的表面下方的更小的缺陷将变得可检测。至今,钢已被测试,但是由于施加的低热应力,该方法特别适用于塑料,复合材料和其他敏感材料。
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
作者没有什么可以披露的。
Acknowledgments
我们要感谢Taarna Studemund和Hagen Wendler拍摄实验设备的照片,并为他们的图形出版做准备。此外,我们要感谢Anne Hildebrandt的样品准备工作,Sreedhar Unnikrishnakurup,Alexander Battig和Felix Fritzsche进行验证。
Materials
| Name | Company | Catalog Number | Comments |
| 500 W diode laser system, 940 nm | Laserline | LDM 500 - 20 | Pilot laser class 2 @ 650 nm, diode laser is a class 4 laser system --> special laboratory needed |
| Laser control box | Laserline | Laser control box LDM | Add on to the laser system, used to switch electronically, laser threshold, shutter, laser on 0 V..5 V TTL |
| Control box scanner | Laserline | Add on to the laser system, used to adjust the optical output power via analog signal from 0 V..10 V | |
| Fiber Laser Mount 2", f = 80 mm | Laserline | Add on to the laser system | |
| Multifunction Data Aquisition (DAQ) Device + BNC Terminal | National Instruments | NI-USB 6251 | The DAQ card is used to trigger the IR camera, the DLP Light Commander 5500, control Laser and diode PDA 36A |
| Standard - PC | Control PC - graphic card for two screens, at least 4 x USB, Windows based | ||
| BNC cabel | Standard cable | ||
| HDMI cable | Standard cable | ||
| Micro USB to USB cable | Standard cable | ||
| LabVIEW 2013 SP1 Development System | National Instruments | Development environment for device control | |
| LPPT control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT intensity software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT laser control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| Matlab 2016b | MathWorks | Postprocessing of the measurement data | |
| LPPT postprocessing software | BAM | Postprocessing of the measurement data | |
| IR camera control PC | InfraTec | Control PC is supplied by camera distributor | |
| IR camera control software | InfraTec | Irbis 3 Professional | |
| InfraTec SDK | InfraTec | Dynamic Link Library as interface between the native data aquisition format of Infratec and Matlab | |
| IR camera | InfraTec | Image IR 8300 | 640 x 512, cooled InSb detector, wavelength 2 µm..5.7 µm, noise = 20 mK + accessories (LAN cable, Digital in/out cable, space ring, power supply, case) |
| Tripod | Manfrotto | 161MK2B | |
| IR camera mount | Manfrotto | 405 | |
| Projector development kit (PDK) for digital light processing (DLP) technology (DLP Light Commander 5500) | Logic PD | DLP-LC-DLP5500-10R | DLP5500 Digital Micromirror Device from Texas Instruments included , light engine and case need to be disassembed |
| PDK control software | Logic PD | Included when delivered, DLP Light Commander control software | |
| Mechanical platform for the PDK | BAM | Self made (140 x 230 x 420) mm3 | |
| Power meter control unit | Ophir | Vega | USB Interface |
| 30 W power meter head | Ophir | 30(150)A-LP1-18 | Power meter head to determine Transmission of the projector system |
| 500 W power meter head | Ophir | FL500A | Power meter for process supervision |
| Motion controller | Newport | ESP301 | with USB Interface |
| Translation stage | Newport | M-ILS200CC | Connected to ESP301 |
| Photodiode with amplifier | Thorlabs | PDA 36A-EC | 1" mount |
| Reflective filter ND1 | Thorlabs | ND10A | to be mounted to the PDA 36A |
| Pinhole 1" | Thorlabs | P1000S | to be mounted to the PDA 36A |
| Optical aluminium breadboard | Thorlabs | MB60120/M | (1,200 mm x 900 mm) base |
| Plano Convex Lens f = 200 mm | Thorlabs | LA1979-B | Coated for IR, first telescope lens |
| Plano Convex Lens f = 75 mm | Thorlabs | LA1145-B | Coated for IR, second telescope lens |
| xy-translation stage | Newport | M401 | Used for adjusting the telecope |
| Beamsampler | Thorlabs | BSF20-B | Splits the optical output, used to reduce the optical input for the projector system |
| Mirror | Thorlabs | BB2-E03 | Mirror for coupling the beam to the DLP Light Commander |
| Heavy duty lab jack | Thorlabs | L490 | Used for the fiber mount and on top of the linear stage to position the sample (2x) |
| PDK-objective | Nikon | Nikon AF Nikkor 50 mm 1:1:8:D | Objective for DLP Light Commander, 50 mm |
| Plano Convex Lens f = 100 mm | Thorlabs | LA1050 -B | Lens is attached to the Nikon Objective |
| Bi-Convex Lens f = 60 mm | Thorlabs | LB1723 -B | Lens to be attached to the Nikon objective in order to determine the optical transmission with the 30 W measurement head |
| Square protected gold mirror | Thorlabs | PFSQ20-03-M01 | |
| High power IR sensor card | Newport | F-IRC-HP-M | Sensor card to check the optical pathway |
| 2" crosshairs | BAM | Self-made | |
| 1" crosshairs | BAM | Self-made | |
| Bullseye level | Thorlabs | LCL01 | |
| Translation Stage | Newport | M-UMR8.25 | Used for measuring the beam profile |
| Micrometer screw | Newport | DM17-25 | Used with translation stage M-UMR8.25 |
| Mounted Zero Aperture Iris | Thorlabs | ID75Z/M | used to check the optical pathway |
| Bases and Post Holders Essentials Kit, Metric and Universal Components | Thorlabs | ESK01/M | Basis |
| Posts & Accessories Essentials Kit, Metric and Universal Components | Thorlabs | ESK03/M | |
| M6 Cap Screw and Hardware Kit | Thorlabs | HW-KIT2/M | |
| Construction Rails | Thorlabs | XE25L700/M | |
| 1" Construction Cube | Thorlabs | RM1G | Used to mount construction rails |
| Electrical discharge machining | Sodick | AG60L | www.sodick.de |
| St37 block of steel (100 x 100 x 40) mm3 |
BAM | self-made, hidden defect with remaining wall thicknesses of 0.25 mm, 0.5 mm, 0.70 mm, 1.25 mm (shown in Figure 5) | |
| St37 block of steel (100 x 100 x 40) mm |
BAM | self-made, hidden defect with remaining wall thicknesses of 1 mm, 1.5 mm, 1.75 mm, 2 mm (shown in Figure 5) | |
| Graphite spray | CRC Industries Europe NV | GRAPHIT 33 | Ref. 20760, 200 mL aerosol (Kontakt-Chemie) |
| Protective tape | Tesa | tesakrepp 4348 | used to protect the hidden defects while coating |
References
- Thiel, E., Kreutzbruck, M., Ziegler, M. Laser-projected photothermal thermography using thermal wave field interference for subsurface defect characterization. Appl. Phys. Lett. 109 (12), 123504 (2016).
- Ibarra-Castanedo, C., Tarpani, J. R., Maldague, X. P. V. Nondestructive testing with thermography. Eur. J. Phys. 34 (6), 91-109 (2013).
- Maldague, X. P. Introduction to NDT by active infrared thermography. Mater. Eval. 60 (9), 1060-1073 (2002).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning pulsed laser spot thermography. Ndt&E Int. 44 (2), 216-225 (2011).
- Lugin, S. Detection of hidden defects by lateral thermal flows. Ndt&E Int. 56, 48-55 (2013).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning laser-line thermography and laser-spot thermography. Meas. Sci. Technol. 22 (3), (2011).
- Pech-May, N. W., Oleaga, A., Mendioroz, A., Salazar, A. Fast Characterization of the Width of Vertical Cracks Using Pulsed Laser Spot Infrared Thermography. Journal of Nondestructive Evaluation. 35 (2), 22 (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. SPIE 9761. Douglass, M. R., King, P. S., Lee, B. L. , Spie-Int Soc Optical Engineering. (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. WCNDT 2016. , 6 (2016).
- Mandelis, A. Diffusion-Wave Fields: mathematical methods and Green functions. , Springer-Verlag. (2001).
- Almond, D., Patel, P. Photothermal Science and Techniques. 10, Chapman & Hall. (1996).
- Salazar, A. Energy propagation of thermal waves. Eur. J. Phys. 27 (6), 1349-1355 (2006).
- Bennett, C. A., Patty, R. R. Thermal wave interferometry: a potential application of the photoacoustic effect. Appl. Opt. 21 (1), 49-54 (1982).
- Busse, G. Stereoscopic depth analysis by thermal wave transmission for nondestructive evaluation. Appl. Phys. Lett. 42 (4), 366 (1983).
- Holtmann, N., Artzt, K., Gleiter, A., Strunk, H. P., Busse, G. Iterative improvement of Lockin-thermography results by temporal and spatial adaption of optical excitation. Qirt J. 9 (2), 167-176 (2012).
- Pribe, J. D., Thandu, S. C., Yin, Z., Kinzel, E. C. Toward DMD illuminated spatial-temporal modulated thermography. Proc. SPIE 9861. , (2016).
- Ravichandran, A. Spatial and temporal modulation of heat source using light modulator for advanced thermography. , Missouri University of Science and Technology. (2015).
- DLP 0.55 XGA Series 450 DMD. , TexasInstruments. (2015).
- Application Note - DLP System Optics. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?baseLiteratureNumber=dlpa022&keyMatch=dlpa022&tisearch=Search-EN-Everything (2010).
- DLP LightCommander Control Software - User Manual. , LogicPD. Available from: https://support.logicpd.com/ProductDownloads/LegacyProducts/DLPLightCommander.aspx?_sw_csrfToken=318b0448 (2011).
- White Paper - Laser Power Handling for DMDs. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?literatureNumber=dlpa027&fileType=pdf (2012).
- Moench, H., et al. High-power VCSEL systems and applications. Proc. SPIE 9348. , (2015).
