

Summary
תנועה נבחנת לעיתים קרובות תוצאה התנהגותית במודלים שונים של מחלת בתחומים כמו אורתופדיה הנוירולוגיה. מאמר זה וידאו מתכוון לתאר שיטה לאיסוף התגובה הקרקע כוחות קינמטיקה של חולדות במהלך תנועה חסרת מעצורים.
Abstract
התנהגות, בהגדרה הרחבה ביותר, יכולה להיות מוגדרת כביטוי המנוע של תהליכים פיזיולוגיים. ככזה, התנהגויות כל ביטוי דרך מערכת התנועה. בתחומי הנוירולוגיה אורתופדיה, תנועה היא התנהגות הערכה כלל עבור מגוון רחב של מודלים המחלה. לדוגמה, שחזור של תנועה אחרי פציעה טראומטית במערכת העצבים היא אחת ההתנהגויות העריכו לרוב 1-3. למרות תנועה ניתן להעריך באמצעות מגוון של מדידות נקודת קצה (למשל לקח זמן כדי להשלים משימה של תנועה וכו '), אמצעים kinematic semiquantitative (כגון סולמות דירוג סודר (למשל באסו ביטי ו Bresnahan של תנועה (BBB) סולם דירוג, וכו')) ו פונדקאית מדדים של התנהגות (כגון כוח שריר, מהירות הולכה עצבי, וכו '), רק קינטיקה (מדידות כוח) ו קינמטיקה (מדידות של מקטעים הגוף בחלל) לספק תיאור מפורט של האסטרטגיה שבה חיה היא מסוגלת locomote 1. אמנם לא מדידות חדשות, kinematic ו הקינטית של מכרסמים locomoting כעת יותר נגיש בשל הזמינות של ציוד זמין מסחרית המיועדת למטרה זו. חשוב לציין, עם זאת, הנסיינים צריכים להיות מאוד מוכרת עם התיאוריה של מנתח biomechanical להבין את היתרונות והמגבלות של צורות אלה של מנתח לפני היציאה מה יהיה מחקר יחסית עתירי עבודה. המאמר הנוכחי נועד לתאר שיטה לאיסוף kinematic הקרקע כוח התגובה הנתונים באמצעות ציוד מסחרי זמין. פרטי ציוד ומכשירים הגדרת, אימון טרום של בעלי חיים, הכללת קריטריונים הרחקה של פועל מקובל, שיטות לאיסוף נתונים מפורטים. אנו מדגימים את השירות של טכניקה זו על ידי ניתוח התנהגותי המתאר את קינמטיקה קינטיקה של מבוגרים זן מתאימים צעירים, בגיל העמידה, וחולדות גריאטריות.
Protocol
1. טרום דרישות עבור ניתוח תנועה ביומכנית
לפני היציאה על רכישת ציוד יקר ניתוח של תנועה, ותכנון ניסויים שבהם קינמטיקה ו / או הערכה של תנועה קינטית יבוצעו, זוהי חובתו של הנסיין להכיר את ההיבטים הטכניים והמעשיים של מנתח ביומכנית, התנהגות הסנסורית, התניה אופרנטית בבעלי חיים , טיפול / אחסון / בניהול כמויות גדולות של נתונים דיגיטליים. למרות דרישות אלה מראש נראה ברור הרבה, זה רק לאחר היציאה על סוגים אלה של הניסויים שבו החניכים להבין את המורכבות הטכנית והמעשית של ביצוע ניתוח מפורט של תנועה יחסית. החוקרים ממליצים כי הנסיינים לקורס העוסק ביומכניקה מבוא, להכיר או לשכור מישהו מכיר את שפת התכנות הדרוש לניהול נתונים, שווה בחשיבותו, לבלות זמן הטיפול אינטראקציה משמעותית, ועבודה עם חיות מעבדה. להבנה וניתוח תנועה וניתוח הסנסורית התנהגותיים בתחום מדעי המוח, הנסיינים מתייחסים הפניות חשובים (ראה 1, 4-7).
2. בדיקת kinematic ו קינטי Apparatus
מנגנון בדיקה kinematic ו קינטי, שימושי עבור איסוף נתונים דו צדדי, מורכבת את הרכיבים הבאים (ראה "לוח של ריאגנטים ספציפיים ציוד" לקבלת פרטים נוספים):
- חדר שקט מספיק בגודל (לא בהכרח קול proofed, הממוקם אף באזור תנועה נמוכה)
- רדיו כדי לספק רקע "רעש" כדי להגביל את הרעשים מבחוץ מסיח את החדר לבעלי חיים
- פרספקס שקוף, סגור, משטח שטוח מסלול (180 ס"מ X 20 ס"מ X 60 ס"מ) עם חור רבוע (11 ס"מ X 11 ס"מ) הממוקמים במרכז המסלול במרחק שווה מן הקצוות
- חתיכת plexi זכוכית (10.5 ס"מ X 10.5 ס"מ)
- פעמיים צדדי קלטת דבק סקוטש
- 3M דבק רעיוני עבור סמנים העור
- ניקוב חורים ליצירת סמנים העור
- מכונת הרדמה Isofluorane נדרש חיות הרדמה עבור גילוח לפני המיקום של סמנים העור
- צ'יריוס לתנועה עידוד של החיה לאורך המסלול
- AMTI HE6X6 forceplate
- Vicon Motus מערכת אישית (, תוכנת מחשב וכו ')
- 4 מצלמות וידאו (לפחות 60 הדגימה הרץ) ו חצובות עם כבלים מחבר מתאים
- 4 מצלמה רכוב נורות הלוגן מספק תאורה אופטימליים הארה של הנושא בעלי חיים סמנים העור רעיוני
- מסגרת הולמת כיול בגודל או נפח הדרושים מערכת Motus Vicon לכייל x, y, z לתוך עמדות במרחק צעדים משמעותיים
3. אילוף בעלי חיים
לפני איסוף הנתונים, כל בעל חיים חייב להיות מאומן לחצות שטוח פני השטח, המסלול המצורף. עם קבלת חולדות מהספק בעל חיים מתאים, בעלי חיים צריכים להיות acclimated לביתם החדש למשך שבוע 1. במהלך תקופה זו הסתגלות, צ'יריוס מספר ממוקמים יומי לכלוב של חולדה. בעלי חיים מזון מוגבלת אנרגיה דרישות התחזוקה שלהן כדי למנוע השמנה ולהבטיח את המוטיבציה לבצע משימה זו. לאחר מכן, כל חיה מתבצע על ידי הנסיין במשך 10-15 דקות ביום למשך שבוע 1. במהלך תקופה זו באותו זמן, כל חיה היא להציב לתוך המסלול עם צ'יריוס הממוקם בקצה אחד. לאחר החיה הופך מוכר עם סביבתם, הם יתחילו לאכול את צ'יריוס. לאחר החיה נוחה צ'יריוס אכילה בתוך המסלול, הנסיין צריך אז operantly מצב החיה כדי להפעיל את אורך המסלול תמורה מזון. מטרה זו מושגת על ידי השלכת שלום ¼ לקצה השני של המסלול שבו חולדה ממוקם. לאחר החולדה אוכלת את זה להתראות, להתראות עוד ¼ ממוקם בקצה השני של המסלול. זה נעשה עבור 15-20 דקות מדי יום עד עכברוש בעקביות (> 90% זורק) נע לאורך המסלול במהירות קבועה (כלומר מבלי להפעיל, לעצור, לחקור, או מבלי לשנות הילוך) לאכול את שלום ללא דוהר / תוחמת . החולדה צריך רק להיות המעסיקים הליכה בריצה קלה. במהלך מיזוג של החיות למשימה זו יכולה להוביל החיות דוהר ו תוחמת ההליכה אלה מעיד על חיות נסיעה> 90 ס"מ / שניה תוחמת ושועט ההליכה, biomechanically, קשה יותר לפרש עבור מגוון רחב של סיבות (למשל להוביל רגל הכללת קריטריונים, וכו '). מניסיוננו, פעם חולדות בעקביות להעסיק דוהר או תוחמת ההליכה, קשה, אם לא בלתי אפשרי לקבל אותם להשתמש בהליכה בריצה קלה תוך locomoting על המסלול. מהירויות> 90 ס"מ / ים נתפסים לעתים רחוקות אחרי לחיה סבל מפציעה היקפי או מערכת העצבים המרכזית. זמן להגיע אימון מוצלח הוא Variable בין הזנים והמינים של חולדות. Wistar, לואיס, לונג אוונס, ו-ספראג Dawley זנים מסוגלים בעקביות לעבור את המסלול בתוך 2 שבועות מתחילת ההכשרה 8. מניסיוננו, פישר (F-344) חולדות נוטים לקחת כלפי מעלה של 4-6 שבועות כדי ללמוד את המשימה 8.
4. עמדה משותפת לציון
ניתוח Forelimb kinematic אינו מהימן בשל חפץ העור התנועה שהוטלו על ידי הנחת סמנים העור על forelimbs אשר החריפה של מינים, כמו עכברושים, בעלי בתנוחת הכריעה 9. במקום זאת, קינמטיקה של forelimbs חייב להיות מושגת באמצעות צילום רנטגן או הצילום fluoroscopy 10-13. ככזה, איבר האחוריות עמדה משותפת מיקום הסמן מתואר רק בזאת.
לפני איסוף הנתונים, עכברוש אחד חייב להיות בהרדמה לפחות 24 שעות מראש של איסוף נתונים באמצעות הרדמה שאיפה המתאים (למשל isofluorane, 1.5-2% שחויגו על vaporizor דיוק) ומנוהלים חמצן דרך מסכה הפנים, אנטומי הטופוגרפי מפתח ציוני חייב להיות מסומן. לנוכח קוצר הנוהל, כי ארוך טווח סוכני הרדמה לא רגילים, השימוש במכשיר התחממות חיים לא צריך לשמש כדי לשמור על טמפרטורת הגוף של בעל החיים. לאחר החיה הוא הרדים, הגפיים האחוריות ואת dorsum, לרמה של פסגות הכסל הם מגולח. חיה ממוקם אז שעינת חזה ו hindlimbs שלה ממוקמים בעמדה עומד בקירוב באמצעות קצף מוצק האריזה כדי לתמוך בה. העור שמעל הגולגולת ביותר חלקים של פסגות הכסל, trochanter גדולה יותר של עצם הירך, את גבששת השוקה לרוחב, המפרק tarsal, וההיבט דיסטלי ו רוחבי של כף הרגל 5 th מסומן בטוש לא רעיל קבע. החיה היא התאוששה מן ההרדמה. עבור מחקרים הזמני, הרדמה תקופתי עשוי להידרש לגלח את hindlimbs ובכך לאפשר סמן הבאים השמה רעיוני (ראה להלן). כמו כן, הדגשת יומי של ציוני דרך אנטומיים סימנה בעבר (באמצעות סמן אותו רעיל) יידרש כמו חולדות יהיה לאט להסיר את סמני דרך התנהגות טיפוח טבעיים.
5. נתונים הקלטה
כל התצוגות מצלמה נבדקות על מנת להבטיח כי עמדתם היא מתאימה ללכוד את אותו שדה הראייה. כל מצלמה צריך להיות ממוקם על כ 60-80 מעלות זה לזה. שדה הראיה צריך לכלול את forceplate במרכז אורך המסלול מספיק כדי ללכוד שתי פסיעות.
היקף כיול ממוקם בתוך אזור שנקבע מראש של המסלול. מסגרת אחת של נפח כיול בתוך המסלול, מתוך כל המצלמות, הוא נתפס. כל הסימנים מכויל לאורך כל הקטבים הם דיגיטציה. רק פעם אחת טעות משביע רצון ב digitizing מושגת, הנסיין להמשיך לאסוף נתונים של תנועה יכול. שלב זה הוא קריטי כיול לפני איסוף הנתונים. אם לא מתבצע כיול מדויק, או אם כיול אינה מתרחשת מיד לפני הפעלת ההקלטה, כל הנתונים שיתקבלו יהיו מדויקים שמיש. חשוב לציין, אם בכלל של המצלמות הם נגע או עבר, היא הבטוחה ביותר להניח כי הכיול של המערכת צריך להיות חוזרות ונשנות.
מיד לפני הצבת בעלי חיים המסלול, משקלו מוקלט מראש עשוי חרוטי סמנים העור רעיוני (באמצעות קלטת 3M רעיוני, ראו טבלה) הם דבקו מראש סימני הרגיש שנעשו על ציוני דרך הגפיים האחוריות טופוגרפית. הקלטה משקל של החיה יאפשר נורמליזציה רטרוספקטיבית של כוחות התגובה הקרקע משקל הגוף - היבט חשוב אם אדם רוצה לעשות השוואות בין הקבוצות. בנוסף, מדידת משקל הגוף מאפשר ניטור של הבריאות הכללית של החיה במשך תקופת הניסוי. מיקום מרקר רק דורש טיפול בבעלי חיים מתאים ואינו דורש הרדמה של החיה. אם דבק בקלטת רעיוני אינו מספיק כדי לדבוק העור של החיה, כמות קטנה מאוד של דבק רעיל (למשל 3M דבק VetBond רקמות) ניתן להשתמש כדי להקל על הדבקות של הסמן על הגוף של בעל החיים. לאחר סמנים ממוקמות על hindlimbs, הנסיין צריך להיות ממוקם בנוחות ליד המקלדת של המחשב ויש לי ביד את הסמן האירוע מצורף דרך מערכת Vicon Motus. באמצעות קובץ מכויל כתבנית, מספר קבצים נעשות מראש של ההקלטה. בדרך כלל, 25 עד 30 קבצים צריך להיות נשמר. כל קובץ יש שם ייחודי. כל קובץ יהיה לייצג את אחד רשמה ריצה של החיה מוקלט. עשרים וחמישה עד 30 קבצים נדרשים על מנת להבטיח כי בכמות מספקת של מנהל הישיבה הקריטריון להכללה מהירות (כלומר 60-90 ס"מ / s) נאספים. לאחר מספר מספיק של קבצים שנוצרו הנסיין יכול להתחיל לאסוף נתונים. הדוארxperimenter חייב להנחות את חולדה על מעבורת בתוך המסלול על ידי זריקת פיסות ¼ של צ'יריוס בכל צד של המסלול. בתיאום העיתוי זהיר, סמן את האירוע מופעלת על ייזום קצר לפני השלמת החולדה בהצלחה השלמת לעבור לאורך המסלול. לאחר בחינת הקרקע גולמי התגובה כוח העתקה, ואחרי הקלטה אם שמאל או בגפיים זכות להכות את הצלחת כוח, הקובץ נשמר סגור. מספר שווה של להיטים forceplate על ימין ועל שמאל איבר צריך להיות מוקלט. התהליך של הקלטת נתונים לרוץ מסוים חוזר על עצמו עד בכמות מספקת של פועל נרשמו.
6. ניתוח נתונים
עם סיום איסוף הנתונים קינמטיקה התגובה לכוחות הקרקע, כל אחד לברוח כל בעל חיים צריך להיות מוערך על מהירות. באמצעות שני סמנים קבועים יחסית (למשל כנפיים של iliums) אפשר להעריך את נקודת וירטואלי בין סמנים (נעשה לפני בעת יצירת תבנית Motus Vicon הקובץ). לפני חישוב מהירות של נקודה זו "וירטואלי", סמנים עבור סמנים הכסל חייב להיות דיגיטציה. שימוש Vicon motus תוכנה, מהירות בשלב זה וירטואלית בכיוון ה-X (בכיוון אופקי של התנועה) מחושב. בעשותו כן, פועל רק בתוך טווח מהירויות מסוים (שנקבע מראש) משמשים את הניתוחים הסופי. אנו מוצאים כי החיות נע בין 60-90 ס"מ / s משתמש ההליכה בריצה קלה עקבית. מינימום של 10 ריצות (5 ריצות שבו איבר שמאל יוצר קשר עם פלטפורמת כוח 5 רץ שם את האיבר הנכון יוצר קשר עם פלטפורמה לכוח) נדרשים. לאחר ריצות מקובל מזוהים עבור כל חיה, דיגיטציה של סמנים העור שנותר חייב להסתיים.
כדי לפצות על תנועת חפץ העור מעל הברך, הערכת עמדת הברך מחושב באמצעות טריאנגולציה (בצומת בין שני עיגולים קינמטיקה 2D, או בצומת בין 2 התחומים 3D קינמטיקה), כפי שתואר קודם לכן. , היפ הברך, קרסול זוויות משותף, מהירויות, והאצות יכולים עכשיו להיות נחושים. עמידה בזמנים, תתנדנד ניתן גם להעריך, אם כי מידת הדיוק שלהן מוגבלת המבוססת על מהירות הדגימה של מצלמות להיות מועסק. חישובים אלה ואחרים יכול להתבצע ישירות (כלומר מבלי לייצא) באמצעות Vicon Motus תוכנה KineCalc, או ניתן לייצא נתונים כנתוני ASCII ונותחו באמצעות השגרה הניתנים להתאמה אישית בתוכנה כגון Matlab.
תגובה קרקע נתונים כוח נמדד מוגבר על ידי פלטפורמת כוח AMTI ואסף הרץ ב 1200 על ידי Vicon Motus. ככזה, פעם אחת התגובה הקרקע נתוני כוח נאסף, מתאים דיגיטלית מסנן מוחל על הנתונים באמצעות Motus Vicon. בהתחשב בכך הנסיין קבע כבר את מהירות הנסיעה ומפעיל מקובל לזהות סמנים לאחר digitizing העור המתאים, תגובת הקרקע בכוח נתונים שנאסף בו זמנית כמו הנתונים kinematic, ניתן לנתח באמצעות Vicon Motus KineCalc ישירות, או בעקיפין באמצעות כמה תוכנות אחרות להתאמה אישית השגרה. מגוון של משתנים עבור הכוחות, בכל אחד משלושה כיוונים אורתוגונליים, יכול להיות מחושב. משתנים אלה כוללים כוח שיא, und באזור העקומה (כלומר דחף), וכו 'חשוב לציין, עם זאת, הנסיין חייב לשמור נתונים איבר ימין ועל שמאל עבור כל מחזור של כל חיה בנפרד. הנתונים שחולצו מן הגפיים ימינה או שמאלה הוא בממוצע עבור כל חיה ושימש נציג את הנתונים עבור החיה. הנתונים נותחו לאחר מכן באמצעות נהלים סטטיסטי המתאים.
7. נציג תוצאות
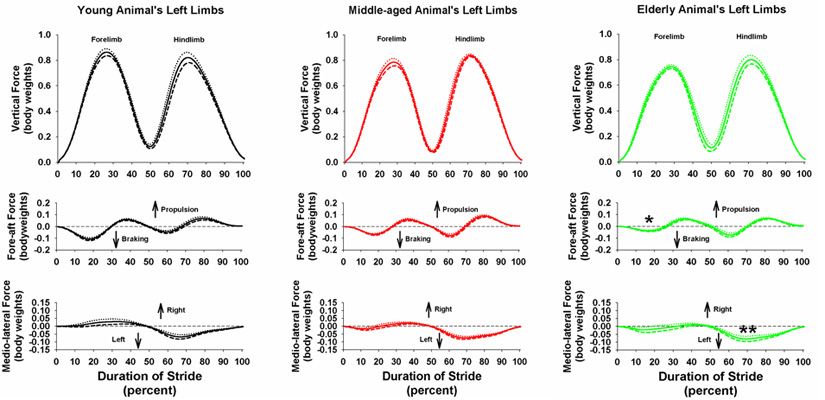
כדי לייצג את השירות של סוג זה של ניתוח של תנועה, קינמטיקה התגובה לכוחות הקרקע נקבעו עבור נשים חולדות צעירות, בגיל העמידה, ו גריאטרי Wistar. מניתוח זה, הקשורות לגיל נמצאו הבדלים עבור נשים חולדות Wistar. בפרט, תגובת הקרקע ניתוח כוח מוכיח כי חולדות גריאטרי צמצמו את יכולת הבלימה forelimb נוטים להשתמש hindlimbs שלהם יותר לייצוב לרוחב לעומת קבוצות אחרות של בעלי חיים (איור 1). ניתוח kinematic לא נמצאו הבדלים סטטיסטיים בין כל קבוצה, למרות קינמטיקה מוכיח כי ניתן להקליט בקלות מגיל כמעט כל של עכברוש (איור 2).

איור 1 תגובת כוח קרקע התחקות שנלקחו גפיים השמאלי של צעירים. (4 חודש הישן, n = 7), בגיל העמידה (13-14 חודשים, n = 7), גריאטרי (24 חודשים; n = 5) הנקבה Wistar חולדות. גפיים העכבר היו דומות. ניכר בנקל כי חולדות גריאטרי להשתמש forelimbs שלהם פחות בלימה (= * p <0.05) לעומת חולדות צעירות בגיל העמידה, וחולדות גריאטריות נוטים להשתמש hindlimbs שלהם יותר לייצוב לרוחב לעומת חולדות צעירות (**). קווי מוצק מייצגים כלומר, קווים מקווקווים מייצגים ממוצע + SE; מקווקוהקווים מייצגים ממוצע SE. אנא לחץ כאן כדי לראות דמות גדולה.

איור 2. דמויות מקל kinematic עבור איבר שמאל של חולדות צעירות, בגיל העמידה, ו גריאטרי. דמויות Stick מייצגים את התנועה הממוצע של איבר שמאל עבור כל הקבוצות. לא היו הבדלים משמעותיים בין קבוצות של חיות עבור זווית משותפת במהלך מחזור צעד. אנא לחץ כאן כדי לראות דמות גדולה.
Discussion
המאמר הנוכחי מספק מתודולוגיה להערכת תנועה באמצעות קינמטיקה כמותי רציף התגובה הקרקע כוח ונחישות. חשוב לכל מי שמעוניין וכשהפלגתי מתודולוגיה זו היא רקע חזק ביומכניקה של תנועה, התנהגות בעלי חיים הסנסורית, ונתונים ניהול מניפולציה. למרות kinematic הקרקע כוח ונחישות התגובה דורש זמן מומחיות נוספת, לעומת כמה צורות אחרות של ניתוח של תנועה (אמצעי קצה כגון סולמות דירוג סודר), את הנתונים המתקבלים הוא רגיש, אובייקטיבי כמותי עבור מגוון רחב של 14-22 אורתופדיות ונוירולוגיות 1-3, 23-32 דגמים של המחלה, במגוון רחב של מינים.
סיפקנו נתונים המתאר הבדלים תנועה בין הגילאים השונים של זן בהתאמה מידע חולדות שלא ניתן לדלות באמצעות צעדים פשוטים ורגישים פחות. יתר על כן, ניתוח kinematic ו הקינטית של תנועה נעשה שימוש כדי לתאר שינויים של תנועה במגוון רחב של מצבים של מערכת העצבים שבו וצורות אחרות של הערכה יהיה מוצלח. 8, 23-25, 27 השימוש באמצעים רגיש הופך להיות חשוב במיוחד כאשר אנו מעריכים therapeutants פוטנציאל עבור דגמים שונים של המחלה. אם הבדיקה אינו רגיש מספיק כדי להבחין אפקט של therapeutant פוטנציאל הנסיין מסתכן בביצוע שגיאה מסוג II סטטיסטית (כלומר הסיכום אין השפעה של הטיפול, כאשר למעשה לא היתה השפעה). יתר על כן, כי אמצעי קצה ובדיקות סובייקטיבי יותר להעריך תנועה, קיים פוטנציאל של משוא פנים. הערכה kinematic ו הקינטית הוא אובייקטיבי לחלוטין בכך, בתנאי הקריטריון המתאים והכללה / דחייה נעשים מראש, הנסיין פשוט אוספת, בוחן ומחיל הנתונים המתאימים הנתונים (כלומר, אין שום מרכיב סובייקטיבי להגדרה נתונים).
ניתוח kinematic ו הקינטית גם מקנה את היכולת לשמש במגוון רחב של מינים. למעשה, קינמטיקה, תגובת הקרקע נחישות כוח, או שניהם היו בשימוש במגוון רחב של מינים כגון 33-35 פילים, בקר 36, 37-40 סוסים, כלבים 4, 41-45, חתולים 21, 46-49, שונים מכרסמים 3, 8, 50, 51, הציפורים 4, 52-55, ודגים 56, 57 (הרשימה הזאת היא בהחלט לא ממצה). הניסיון של המחברים, לעומת זאת, השימוש בעכברים הוא בעייתי בהתחשב בעובדה עכברים אינם קלים בתנאי operantly לנסוע לאורך המסלול. לאור זאת, העכברים לא לנסוע במהירות קבועה יחסית, במקום מהירות מעלה האטה כאשר חוצים את המסלול. התנהגות זו עלולה סביר, בין השאר, ניתן להתגבר על ידי הפעלת עכברים על הליכון ו-Video מקליטה locomoting חיה על ההליכון. 58 אם מנגנון ניסיוני לקביעת התגובה הקרקע בכוח היה להיות שונה עבור השימוש הליכון, תגובת הקרקע נחישות כוח היה סביר רק להשיג בקלות לכוח הקרקע אנכי התגובה כמו את החגורה הליכון יפריע הקדמי הירכתיים מדיו, לרוחב כוח ונחישות.
בסך הכל, ניתוח kinematic ו הקינטית של תנועה היא שיטה אמין, רגיש, אובייקטיבי, כי יכול להיות מועסק על מודלים שונים של תנאים אורתופדיות ונוירולוגיות. יתר על כן, כל הציוד הפך לזמין לשימוש מכרסמים, ובכך מבטל כל סיבה הקשורה לאי ביצוע צורה זו של ניתוח התנהגות הסנסורית.
Disclosures
אין ניגודי אינטרסים הכריז.
Acknowledgments
מחקר זה מומן על ידי מענק דיסקברי AAW מן למדעי הטבע וההנדסה מועצת המחקר של קנדה.
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J.
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M.
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R.
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}