

Summary
Locomotion часто рассматривается как результат поведенческих моделей в различных заболеваний в таких областях, как неврология и ортопедия. Это видео бумаги намерен описать метод сбора земле силы реакции и кинематики от крыс во время безудержного движения.
Abstract
Поведение, в самом широком определении, может быть определена как двигатель проявлением физиологических процессов. Таким образом, все поведение проявляется через опорно-двигательного аппарата. В области неврологии и ортопедии, локомоции обычно оценивается поведение для различных заболеваний моделей. Например, опорно-двигательного восстановления после травмы, чтобы нервная система является одним из наиболее часто оценивали поведение 1-3. Хотя передвижение может быть оценена с помощью различных оконечных измерений (например, время, необходимое для завершения двигательной задачи и т.д.), полуколичественного кинематической меры (например, порядковых шкал (например, Бассо Битти и Бреснахан опорно-двигательного (BBB) рейтинговой шкале, и т.д.)) и суррогатные меры поведения (например, мышечной силы, скорости нервной проводимости и т.д.), только кинетики (сила измерений) и кинематики (измерение сегментов тела в пространстве) обеспечивают детальное описание стратегии, которой животное может передвигаться 1. Хотя это и не новая, кинематических и кинетических измерений locomoting грызунов в настоящее время более доступными из-за наличия доступных на рынке оборудования, предназначенного для этой цели. Важно, однако, экспериментаторы должны быть хорошо знакомы с теорией биомеханического анализа и понять преимущества и недостатки этих форм анализа, до начала работы на том, что станет довольно трудоемкий исследования. Настоящая работа имеет целью описать метод сбора кинематических и землю сила реакции данных с помощью имеющихся в продаже оборудования. Детали оборудования и аппаратуры установки, предварительно дрессировки животных, критерии включения и исключения приемлемого работает, и методы сбора данных описаны. Проиллюстрируем полезность этого поведенческие техники анализа с описания кинематики и кинетики деформации соответствием молодой человек, среднего возраста, и пожилых крысах.
Protocol
1. Предпосылки для Биомеханические Анализы Locomotion
Прежде чем приступать при покупке дорогостоящего оборудования, опорно-двигательного анализа и планирования экспериментов, где кинематики и / или кинетической оценки опорно-двигательного будут выполнены, необходимо, чтобы экспериментатор быть знакомы с техническими и практическими аспектами биомеханического анализа, сенсомоторной поведения, оперантного обусловливания животных и обработки / хранения / управления большими объемами цифровых данных. Хотя эти предпосылки показаться очевидным для многих, это только после того, приступая к такого рода эксперименты, в которых слушатели понимают, технические и практические сложности выполнения относительно подробные опорно-двигательного анализа. Авторы рекомендуют, что экспериментаторы записаться на курс дело с вступительной биомеханики, быть знакомым с или нанять кого-нибудь знаком с языком программирования, необходимые для управления данными, а не меньшее значение, проводят значительную взаимодействующих времени, обработки и работы с лабораторными животными. Для понимания анализа движения и сенсомоторной поведенческого анализа в нейробиологии, экспериментаторы называют несколько важных ссылок (см. 1, 4-7).
2. Кинематическая и кинетические испытательная аппаратура
Кинематических и кинетических тестирования аппарат, полезный для сбора двусторонних данных, состоит из следующих компонентов (см. "Таблица специфических реагентов и оборудования» для дополнительной информации):
- Тихая и достаточно размера комнаты (не обязательно звукоизоляцией, хотя и расположен в районе с низким трафиком)
- Радио поставлять фоновый "шум" ограничить отвлекающие шумы снаружи комнаты к животным
- Очистить плексигласа, заключенный, плоские поверхности взлетно-посадочной полосы (180 см х 20 см х 60 см) с квадратным отверстием (11 см х 11 см) расположен в центре взлетно-посадочной полосы на равном расстоянии от обоих концов
- Кусок плексигласа стекла (10,5 см х 10,5 см)
- Двусторонняя клейкая лента скотч
- 3M отражающей клейкой ленты для кожи маркеров
- Дырокол для создания кожи маркеров
- Isofluorane наркозный аппарат, необходимые для обезболивающим животных для бритья до помещения кожи маркеров
- Cheerios для поощрения движения животного по длине взлетно-посадочной полосы
- AMTI HE6X6 forceplate
- Vicon Motus индивидуальные системы (программное обеспечение, компьютерные и т.д.)
- 4 видеокамеры (не менее 60 Гц отбора проб) и штативы с соответствующими кабелями разъем
- 4 камеры установлены галогенные фары обеспечивает оптимальное освещение для подсветки животных темы и отражающие маркеры кожи
- Соответствующие размеру кадра калибровки или объеме, необходимом для системы Vicon Motus для калибровки х, у, г позиции в значимые меры расстояния
3. Обучение животных
До сбора данных, каждое животное должны быть обучены, чтобы пересечь плоской поверхности, заключенная взлетно-посадочной полосы. После получения крыс от соответствующего поставщика животных, животные должны подвергаться акклиматизации в свой новый дом в течение 1 недели. За это время акклиматизации, несколько Cheerios размещаются ежедневно в клетке крысы. Животные пищи ограничивается их требования к техническому обслуживанию энергии для предотвращения ожирения и обеспечить мотивацию для выполнения этой задачи. После этого, каждое животное обрабатывается экспериментатор в течение 10-15 минут в день в течение 1 недели. В этот же период времени, каждое животное помещается в взлетно-посадочной полосы с Cheerios расположен на обоих концах. Как только животное становится знаком с окружающей их средой, они начинают есть овсяные хлопья. Как только животное удобно и ест хлопья внутри взлетно-посадочной полосы, то экспериментатор должен operantly состояние животного для запуска длина взлетно-посадочной полосы для пищевой наградой. Это достигается путем подбрасывания ¼ ваше здоровье на противоположном конце взлетно-посадочной полосы, где крысы позиционируется. Как только крыса съедает это ваше здоровье, другой ¼ ваше здоровье находится на другом конце взлетно-посадочной полосы. Это делается в течение 15-20 минут в день, пока крысы последовательно (> 90% бросков) движется по взлетно-посадочную полосу с постоянной скоростью (то есть без запуска, остановки, разведку, или, не меняя походку), чтобы поесть за ваше здоровье, не скакали / ограничивающий . Крыса должна быть только использованием рыси походки. За кондиционирования животных на этой задачи может привести к животным скакали и ограничивающие эти походки свидетельствуют о животных путешествия> 90 см / с Ограничительная и галопом походки, биомеханики, более трудно интерпретировать по разным причинам (например, ноги приводят критерии включения и т.д.). По нашему опыту, как только крысы последовательно использовать скачущего или ограничивающий походки, это трудно, если не невозможно, чтобы они использовали рыси походкой в то время как в locomoting взлетно-посадочной полосы. Скорости> 90 см / с, редко можно увидеть после того, животное страдает от периферической или центральной нервной системе травмы. Время достижения успешного обучения является вариацииBLE между штаммами и полов у крыс. Вистар, Льюис, Лонг-Эванс, и Sprague-Dawley штаммы способны постоянно пересекать взлетно-посадочной полосы в течение 2 недель от начала подготовку 8. По нашему опыту, Фишера (F-344) крысы, как правило, принимают свыше 4-6 недель, чтобы узнать эту задачу 8.
4. Совместная позиция Маркировка
Передних конечностей кинематического анализа ненадежны из-за кожи движение артефакт, введенные путем размещения кожи маркеров на передние конечности который обостряется у видов, как крысы, которые притаились позу 9. Вместо этого, кинематика передние конечности должны быть достигнуты с помощью рентгеновского кинематографа или рентгеноскопии 10-13. Таким образом, задних конечностей совместного размещения маркера только описанные здесь.
До сбора данных, каждая крыса должна быть под наркозом не менее 24 часов до начала сбора данных с использованием ингаляционных анестетиков соответствующие (например, isofluorane, 1,5-2% набранных на точность vaporizor) и вводят в кислород через маску, и ключевые топографические анатомические ориентиры должны быть отмечены. Учитывая краткость процедуры, и из-за длительного действия анестетиков не используются, использование устройства потепления животные не должны использоваться для поддержания температуры тела животного. Как только животное под наркозом, задние конечности и спинки, до уровня подвздошных гребни выбрит. Животное помещается в лежачее положение грудины и задних конечностей находятся в положении стоя приблизительный использованием фирмы упаковочного пенопласта для его поддержки. Кожа, закрывающая черепно-самых частей подвздошных гребней, большого вертела бедренной кости, большеберцовой бугристости боковые, предплюсны сустава и дистальной и латеральной 5-й плюсневой отмечен нетоксичных перманентным маркером. Животное оправилась от наркоза. Для временных исследований, периодические анестезии могут потребоваться для бритья задние конечности, тем самым разрешая последующее отражающей размещения маркера (см. ниже). Кроме того, ежедневное выделение ранее помеченные анатомические ориентиры (с помощью той же нетоксичные маркер) потребуется как крысы будет медленно удалять маркеры путем естественного ухода поведения.
5. Запись данных
Все камеры представления описаны, чтобы их положение является подходящей и захватив же поле зрения. Каждая камера должна находиться примерно на 60-80 градусов друг к другу. Поле зрения должно включать forceplate в центре и длина взлетно-посадочной полосы достаточно захватить два шага.
Калибровка объема помещается в заранее определенные области взлетно-посадочной полосы. Отдельный кадр калибровки объема внутри взлетно-посадочной полосы, с каждого из камеры, в плен. Все калиброванные знаки по длине каждого из полюсов оцифрованы. Только один раз удовлетворительное ошибки в оцифровке будет сделано, можно приступить к экспериментатору сбора опорно-двигательного данных. Эта калибровка шагом является критической до сбора данных. Если калибровка не выполняется точно, или если калибровки не происходит непосредственно перед записью сессии, все полученные данные будут неточными и непригодным для использования. Важно отметить, что, если любой из камер коснулся или перемещен, безопаснее предположить, что калибровка система должна быть повторена.
Непосредственно перед размещением животных в взлетно-посадочной полосы, его вес записывается и готовые конические отражающие маркеры кожи (с использованием светоотражающей лентой 3M, см. таблицу) привязаны к заранее определенным чувствовал рисунка на задней конечности топографических ориентиров. Запись веса животного позволит ретроспективный нормализации сухопутных войск реакция на вес тела - важный аспект, если кто-то хочет делать сравнения между группами. Кроме того, измерение массы тела облегчает мониторинг общего состояния здоровья животного в течение всего эксперимента. Маркер размещение только требует надлежащего обращения с животными и не требует обезболивания животного. Если клей на отражающей пленки недостаточно, чтобы придерживаться кожи животного, очень небольшое количество из нетоксичного клея (например, 3M VetBond ткани клей) может быть использован для облегчения присоединения маркером на теле животного. Как только маркеры, размещенные на задних конечностей, экспериментатор должен быть расположен удобно рядом с клавиатурой компьютера и об руку событие маркер, присоединенной через системы Vicon Motus. Использование калиброванных файл в качестве шаблона, несколько файлов производится до записи. Как правило, от 25 до 30 файлы должны быть сохранены. Каждый файл должен называться однозначно. Каждый файл будет представлять один записал запуск животных не регистрируются. Двадцать пять до 30 файлов, необходимых для обеспечения того, чтобы достаточное количество трасс встреча скорости включения критерия (то есть 60-90 см / с) собираются. После достаточного количества файлов создаются экспериментатор может приступить к сбору данных. Электроннойxperimenter должны строке крысы трансфер в пределах взлетно-посадочной полосы, бросая ¼ куски Cheerios на любом конце взлетно-посадочной полосы. При тщательной координации и сроки, событие маркер срабатывает при начале и непосредственно перед завершением крысы успешно завершив пройти вдоль взлетно-посадочной полосы. После изучения грубой силы реакции земли отслеживание, и после записи ли влево или вправо конечностей удар силой пластины, файл будет сохранен и закрыт. Равное число левых и правых конечностей хитов forceplate должны регистрироваться. Процесс записи данных из данного запуска повторяется, пока достаточное количество трасс были записаны.
6. Анализ данных
После завершения сбора данных для кинематики и сухопутные силы реакции каждого запуска от каждого животного должна быть оценена по скорости. Использование двух относительно фиксированных маркеров (например, крылья iliums) можно оценить виртуальную точку между маркерами (сделано предварительное при создании файла Vicon Motus шаблона). Прежде чем вычислять скорость этого "виртуальные" точки, маркеры для подвздошной маркеры должны быть оцифрованы. Использование Vicon Motus программного обеспечения, скорость этой виртуальной точки в X-направлении (горизонтальное направление движения) рассчитывается. При этом работает только в пределах данного диапазона скоростей (определяется априорно) используются в окончательный анализ. Мы видим, что животные перемещаются между 60-90 см / с с использованием не противоречащих рыси походки. Минимум 10 работает (5 работает где левая конечность вступает в контакт с силой платформы и 5, где проходит правой конечности вступает в контакт с силой платформы) обязательны для заполнения. Как только приемлемо работает определены для каждого животного, оцифровка оставшихся маркеров кожа должна быть завершена.
Чтобы компенсировать движение кожи артефакт за колено, оценка колено позиции рассчитывается с использованием триангуляции (пересечение между двумя кругами 2D кинематики, или пересечение 2 сферах 3D кинематики), как было описано выше. Бедра, колена и скакательного сустава углов, скоростей и ускорений может быть определена. Стойка и качели раз может быть оценена, хотя их точность ограничена основе выборки скорость камеры получить работу. Эти и другие расчеты могут быть выполнены непосредственно (т.е. без экспорта), используя Vicon Motus KineCalc программное обеспечение или данные могут быть экспортированы в ASCII данные и анализируются с помощью настраиваемых процедур в программы, такие как MatLab.
Наземные данные сила реакции измеряется и усиливается платформы силу AMTI и собранные в 1200 Гц Vicon Motus. Таким образом, как только наземные данные силы реакции были получены, соответствующий цифровой фильтр применяется для данных с использованием Vicon Motus. Учитывая, что экспериментатор уже определил скорость движения и определили приемлемый запускается после оцифровки соответствующие маркеры кожи, наземные силы реакции данные, которые были собраны одновременно кинематических данных, могут быть проанализированы с помощью Vicon Motus KineCalc прямо или косвенно, с помощью некоторых других настраиваемым программным обеспечением рутину. Различные переменные для сил, в каждой из трех ортогональных направлениях, могут быть рассчитаны. Такие переменные включают максимальную силу, площадь унд кривой (то есть импульс), и т.д. Важно, однако, экспериментатор должен держаться правой и левой конечности данных для каждого запуска каждого животного отдельно. Данные, извлеченные из правой или левой конечности усредняется для каждого животного и используются в качестве представителя данные для этого животного. Затем данные анализируются с помощью соответствующих статистических процедур.
7. Представитель Результаты
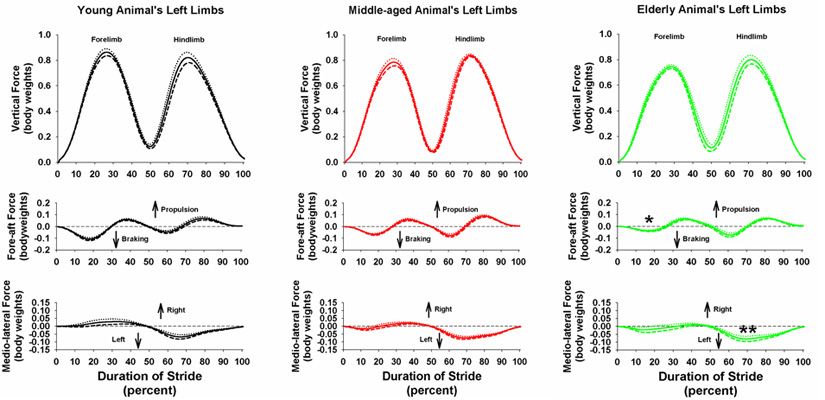
Чтобы представить полезность этой формы опорно-двигательного анализа, кинематики и сухопутные войска реакции были определены для молодых, среднего возраста, и пожилых самок крыс линии Вистар. Из этого анализа, возрастные различия были обнаружены для самок крыс линии Вистар. В частности, в земле сила реакции анализ показывает, что гериатрической крыс сократили передняя тормозная способность и, как правило, используют свои задние конечности более для боковой стабилизации по сравнению с другими группами животных (рис. 1). Кинематический анализ не выявил статистически значимых различий между группами, хотя и демонстрирует, что кинематика может быть легко записаны практически с любого возраста крысы (рис. 2).

Рисунок 1 сухопутных реакция отслеживания взятых из левой конечности молодой. (4 месяца, п = 7), среднего возраста (13-14 месяцев; п = 7) и гериатрического (24 месяцев; п = 5) женский Wistar крысах. Право конечности были похожи. Совершенно очевидно, что гериатрической крысы используют свои передние конечности менее для торможения (* = р <0,05) по сравнению с молодыми и среднего возраста крыс, и гериатрической крыс, как правило, используют свои задние конечности более для боковой стабилизации по сравнению с молодыми крысами (**). Сплошные линии означают, пунктирные линии представляют средний + SE, штриховаялинии представляют означает SE. Пожалуйста, нажмите здесь, чтобы видеть большую фигуру.

Рисунок 2. Кинематическая цифры палкой для левой конечности молодых, среднего возраста, и пожилых крысах. Придерживайтесь цифры представляют означает движение левой конечности для каждой из групп. Существовали никаких существенных различий между группами животных для совместной угол на этапе цикла. Пожалуйста, нажмите здесь, чтобы видеть большую фигуру.
Discussion
Настоящий документ содержит методику оценки передвижения с использованием непрерывного количественного кинематики и наземных силы реакции определения. Важно для тех, кто заинтересован в приступая к этой методологии является большим опытом в области биомеханики движения, животное сенсомоторной поведения и управления данными и манипуляция. Хотя кинематических и землю определения силы реакции требует дополнительного времени и опыта, по сравнению с некоторыми другими формами опорно-двигательного анализа (например, меры конечной точки, порядковых шкал рейтинга), данные, полученные чувствительна, объективной и количественной для различных ортопедических и неврологических 14-22 1-3, 23-32 моделях болезни, в самых разных видов.
Мы предоставили данные, описывающие различия в передвижении между различными возрастами штамм соответствием крыс информации, которые не могли быть подобраны с помощью простых и менее чувствительные меры. Кроме того, кинематические и кинетического анализа передвижения была использована для описания опорно-двигательного изменения в различных условиях нервной системы, где другие формы оценки будет неудачной. 8, 23-25, 27 использования чувствительных мер становится особенно важным при оценке потенциальных therapeutants для различных моделей болезни. Если тест не является достаточно чувствительным, чтобы различить влияние потенциальных therapeutant экспериментатор рискует в совершении второго типа статистической погрешности (т.е. заключение нет эффекта от лечения, когда на самом деле был эффект). Кроме того, поскольку конечной меры и более субъективных тестов, оценивающих передвижения, существует потенциал для смещения. Кинематическая и кинетическая оценка чисто объективным в том, что, при условии соответствующего включения / исключения критерия выполнены априори, экспериментатор просто собирает, изучает и применяет соответствующую статистику данных (то есть нет субъективной составляющей для определения данных).
Кинематическая и кинетический анализ также дает возможность использовать для множества видов. На самом деле, кинематика, силы реакции земли определения, или оба были использованы в самых разных видов, таких как слоны 33-35, крупного рогатого скота, 36 лошадей 37-40, собак 4, 41-45, 21 кошек, 46-49, различные грызунов 3, 8, 50, 51, 4 птицы, 52-55, и рыба 56, 57 (этот список далеко не исчерпывающий). По опыту авторов, тем не менее, использование мышей проблематично, учитывая, что мыши не просто operantly условием для путешествия по взлетно-посадочной полосы. Учитывая это, мышей не поедет на относительно постоянной скоростью, и вместо ускорения и замедления при обходе взлетно-посадочной полосы. Такое поведение вероятнее всего, может, в частности, быть преодолены путем запуска мышей на беговой дорожке и видео-записи на пленку животных locomoting на беговой дорожке. 58 Если экспериментальная установка для наземного определения силы реакции должна была быть модифицирована для использования беговой дорожки, наземные силы реакции определение будет скорее всего, только быть легко получены для вертикальной силы реакции земли, как беговая дорожка пояса будет мешать продольное и средне-боковая сила определения.
В общей сложности кинематических и кинетического анализа передвижения является надежным, чувствительный и объективный метод, который может быть использован для различных моделей ортопедических и неврологических заболеваниях. Кроме того, все оборудование стало доступным для использования в грызунах, тем самым отрицая любые связанные с причиной отказа от выполнения этой формы сенсомоторной поведенческого анализа.
Disclosures
Нет конфликта интересов объявлены.
Acknowledgments
Это исследование было поддержано Discovery Грант AAW от естествознания и техники Научно-исследовательский совет Канады.
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J.
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M.
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R.
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}