

Summary
Locomoção geralmente é analisado como um resultado de comportamento em vários modelos de doença em áreas como neurociência e ortopedia. Este artigo tem a intenção de vídeo para descrever um método para coletar as forças de reação do solo e cinemática de ratos durante a locomoção irrestrita.
Abstract
Comportamento, em sua definição mais ampla, pode ser definida como a manifestação do motor de processos fisiológicos. Como tal, todos os comportamentos se manifestar através do sistema motor. Nos campos da neurociência e ortopedia, a locomoção é um comportamento comumente avaliados por uma variedade de modelos de doenças. Por exemplo, a recuperação locomotora após lesão traumática para o sistema nervoso é um dos comportamentos mais comumente avaliada 1-3. Apesar de locomoção pode ser avaliado usando uma variedade de medições de parâmetros (por exemplo, o tempo necessário para completar uma tarefa locomotora, etc), semiquantitativo medidas cinemáticas (por exemplo, escalas de classificação ordinal (por exemplo, Beattie e Bresnahan Basso locomotor (BBB) escala de avaliação, etc)) e substituto medidas de comportamento (por exemplo, força muscular, velocidade de condução nervosa, etc), apenas cinética (medidas de força) e cinemática (medições de segmentos do corpo no espaço) fornecer uma descrição detalhada da estratégia pela qual um animal é capaz de locomover 1. Apesar de não novas medições, cinemática e cinética de roedores locomoting é agora mais acessíveis devido à disponibilidade de equipamentos comercialmente disponíveis, projetados para este fim. Importante, entretanto, os pesquisadores precisam estar muito familiarizado com a teoria de análises biomecânicas e compreender os benefícios e limitações dessas formas de análises antes de iniciar o que será um estudo relativamente trabalhoso. O presente trabalho tem como objetivo descrever um método para coleta de dados reação cinemática e de forças terrestres usando equipamentos disponíveis comercialmente. Detalhes dos equipamentos e aparelhos set-up, treinamento de pré-animais, critérios de inclusão e exclusão de corridas aceitável, e métodos para a coleta dos dados são descritos. Nós ilustrar a utilidade desta técnica de análise comportamental, ao descrever a cinemática e cinética de adultos tensão pareados jovens, de meia-idade, e ratos geriátricos.
Protocol
1. Pré-requisitos para análises biomecânicas Locomotion
Antes de embarcar em compra de equipamentos caros locomotor análise e planejamento de experimentos onde cinemática e / ou avaliação locomotor cinética será executada, é imperativo que o pesquisador se familiarizar com os aspectos técnicos e práticos de análises biomecânicas, sensório-motor comportamento, o condicionamento operante de animais e manipulação / armazenamento / gerenciamento de grandes quantidades de dados digitalizados. Embora estes pré-requisitos parecer óbvio para muitos, é só depois de embarcar estes tipos de experimentos onde os estagiários perceber as complexidades técnicas e práticas de realizar análise detalhada relativamente locomotor. Os autores recomendam que os experimentadores se matricular em um curso de lidar com a biomecânica introdutória, estar familiarizado com ou contratar alguém familiarizado com uma linguagem de programação necessários para o gerenciamento de dados, e de igual importância, interagindo gastar um tempo considerável, manuseio e trabalho com animais de laboratório. Para a compreensão da análise de locomoção e sensório-motor análise comportamental das neurociências, os pesquisadores são referidas várias referências importantes (ver 1, 4-7).
2. Aparelho Teste cinemática e cinética
Um aparelho de teste de cinemática e cinética, útil para a coleta de dados bilateral, é composto dos seguintes componentes (ver "Tabela de Reagentes e equipamentos específicos" para mais detalhes):
- Sala silenciosa e suficientemente porte (não necessariamente à prova de som, apesar de localizado em uma área de baixo tráfego)
- Rádio para o fornecimento de "ruído" de fundo para limitar os ruídos distraem de fora da sala para animais
- Plexiglass transparente, fechado, pista de superfície plana (180 cm de comprimento X 20 cm de largura X 60 cm de altura) com um buraco quadrado (11 cm X 11 cm) localizada no centro da pista equidistante de ambos os lados
- Pedaço de plexi-glass (10,5 cm X 10,5 cm)
- Fita dupla face adesiva scotch
- Fita adesiva 3M reflexiva para os marcadores de pele
- Furos para a criação de marcadores
- Isofluorano aparelho de anestesia necessária para os animais anestesiar para fazer a barba antes da colocação de marcadores de pele
- Cheerios para o movimento encorajador do animal ao longo do comprimento da pista
- AMTI HE6X6 forceplate
- Vicon sistema Motus personalizado (computador, software, etc)
- 4 câmeras de vídeo (pelo menos 60 Hz de amostragem) e tripés com cabos conector apropriado
- 4 luzes câmera montada halogênio fornece iluminação ideal para a iluminação do assunto animais e os marcadores reflexivos
- Quadro de calibração tamanho adequado ou o volume necessário para Vicon sistema Motus para calibrar x, y, z posições em medidas de distância significativa
3. Treinamento de animais
Antes da coleta de dados, cada animal deve ser treinado para atravessar um flat-superfície da pista, em anexo. Ao receber de um fornecedor ratos adequados com animais, os animais devem ser aclimatados ao seu novo lar para uma semana. Durante este período de aclimatação, cheerios várias são colocados diariamente na gaiola do rato. Os animais são alimentos restritos a suas necessidades de energia de manutenção para prevenir a obesidade e assegurar a motivação para realizar esta tarefa. A partir daí, cada animal é tratado pelo experimentador por 10-15 minutos por dia durante 1 semana. Durante este mesmo período de tempo, cada animal é colocado na pista com cheerios localizados em cada extremidade. Uma vez que o animal torna-se familiarizado com o ambiente, eles vão começar a comer o cheerios. Uma vez que o animal está confortável e cheerios comer dentro da pista, o pesquisador deve, então, operantly condição do animal para executar o comprimento da pista por uma recompensa de alimentos. Isto é conseguido lançando cheerio ¼ para a extremidade oposta da pista onde o rato está posicionado. Uma vez que o rato come essa cheerio, outro cheerio ¼ é colocado no outro extremo da pista. Isto é feito por 15-20 minutos por dia até que o rato de forma consistente (> 90% de lançamentos) se move ao longo da pista a uma velocidade constante (ou seja, sem iniciar, parar, explorar, ou sem mudança da marcha) para comer a cheerio sem galopante / delimitadora . O rato deve ser apenas empregando uma marcha trote. Mais de condicionamento dos animais a esta tarefa pode levar a animais a galope e delimitadora esses andamentos são indicativos dos animais que viajam> 90 cm / s. Delimitadora e galopante gaits, biomecanicamente, são mais difíceis de interpretar para uma variedade de razões (por exemplo, levar a perna critérios de inclusão, etc). Em nossa experiência, uma vez que ratos consistentemente empregar galopante ou delimitadora andaduras, é difícil, senão impossível para tê-los usar uma marcha de trote, enquanto locomoting na pista. Velocidades> 90 cm / s raramente são vistos depois que um animal sofreu com lesões no sistema nervoso periférico ou central. Tempo para alcançar a formação de sucesso é variavel entre as linhagens e sexos de ratos. Wistar, Lewis, Long-Evans e Sprague-Dawley cepas são capazes de atravessar a pista de forma consistente dentro de 2 semanas desde o início do treinamento 8. Em nossa experiência, Fischer (F-344) ratos tendem a levar mais de 4-6 semanas para aprender esta tarefa 8.
4. Posição conjunta Marcação
Forelimb análise cinemática não é confiável devido ao artefato pele circulação impostas pela colocação de marcadores sobre a pele forelimbs que é exacerbado em espécies, como ratos, que têm uma postura agachada 9. Em vez disso, a cinemática dos membros anteriores devem ser alcançados com x-ray cinematografia ou fluoroscopia 10-13. Como tal, membro traseiras colocação marcador conjunta posição só é aqui descrito.
Antes da coleta de dados, cada rato tem de ser anestesiado pelo menos 24 horas antes da coleta de dados utilizando um anestésico inalatório apropriado (por exemplo, isofluorano, 1,5-2% marcados num vaporizor de precisão) e administrados em oxigênio através de máscara facial, e anatômicas topográficas chave marcos devem ser marcados. Dada a brevidade do processo, e porque os agentes de ação prolongada anestésico não são usados, a utilização de um dispositivo de aquecimento de animais não precisam ser usados para manter a temperatura corporal do animal. Uma vez que o animal é anestesiado, nos membros posteriores e no dorso, ao nível das cristas ilíacas são raspadas. O animal é então colocado em decúbito esternal e seus membros posteriores são colocados em uma posição de pé aproximada usando espuma de empresa de embalagem para apoiá-lo. A pele que recobre as porções cranial maioria das cristas ilíacas, o trocânter maior do fêmur, a tuberosidade tibial lateral, a articulação do tarso, eo aspecto distal e lateral do 5 º metatarso é marcada com um marcador não-tóxico permanente. O animal é recuperado da anestesia. Para estudos temporais, anestesia periódica pode ser obrigado a raspar o hindlimbs assim autorizando a colocação de marcador subseqüente reflexivo (veja abaixo). Além disso, diariamente destaque dos marcos anatômicos previamente marcados (usando o marcador não-tóxico mesmo) será exigida como ratos lentamente vai remover os marcadores através de comportamento de limpeza natural.
5. Gravação de dados
Todas as vistas de câmera são examinados para garantir que sua posição é apropriada e capturar o mesmo campo de visão. Cada câmera deve ser colocado em cerca de 60-80 graus um do outro. O campo de visão deve incluir a forceplate no centro e um comprimento de pista suficiente para capturar dois passos.
O volume de calibração é colocado dentro da área pré-determinada da pista. Um único quadro do volume de calibração dentro da pista, a partir de cada uma das câmeras, é capturado. Todas as marcas calibrado ao longo do comprimento de cada um dos pólos são digitalizadas. Apenas uma vez um erro satisfatório na digitalização é realizado, o experimentador pode proceder à coleta de dados locomotor. Esta etapa de calibração é fundamental antes de coletar os dados. Se a calibração não é realizada com precisão, ou se a calibração não ocorre imediatamente antes de uma sessão de gravação, todos os dados resultantes serão imprecisos e inutilizável. Importante, se qualquer uma das câmeras são tocados ou movidos, é mais seguro assumir que a calibração do sistema precisa ser repetido.
Imediatamente antes de colocar o animal na pista, seu peso é gravado e pré-fabricados cônicos marcadores reflexivo (usando fita reflexiva 3M, ver tabela) sejam respeitadas as marcas pré-determinado sentido feita sobre os marcos topográficos dos membros posteriores. Registro do peso do animal vai permitir a normalização retrospectiva das forças de reação do solo com o peso corporal - um aspecto importante se se deseja fazer comparações entre os grupos. Além disso, a medição do peso corporal facilita o monitoramento da saúde geral do animal para a duração do experimento. Colocação único marcador requer a manipulação de animais apropriados e não requer anestesia do animal. Se o adesivo na fita reflexiva é insuficiente para aderir à pele do animal, uma pequena quantidade de cola não tóxica (por exemplo, a 3M Adesivo Tissue VetBond) pode ser usado para facilitar a aderência do marcador no corpo do animal. Uma vez que os marcadores são colocados no hindlimbs, o experimentador deve ser posicionado confortavelmente perto do teclado do computador e ter em mão o marcador de eventos ligados através do sistema Motus Vicon. Usando o arquivo como um modelo calibrado, vários arquivos são feitas antes da gravação. Tipicamente, 25 a 30 arquivos precisam ser salvos. Cada arquivo deve ser nomeado de forma exclusiva. Cada arquivo irá representar registrado executar do animal a ser gravada. Vinte e cinco a 30 arquivos são necessários para garantir que um número suficiente de pistas reunião a velocidade critério de inclusão (ou seja, 60-90 cm / s) são coletados. Depois de um número suficiente de arquivos são criados o pesquisador pode iniciar a coleta de dados. O e-xperimenter deve levar o rato para transporte dentro da pista, jogando pedaços ¼ de cheerios em cada extremidade da pista. Com a coordenação cuidado e tempo, o marcador evento é disparado no início e apenas antes da conclusão do rato concluir com sucesso um passe longo da pista. Depois de examinar a força de reação do solo bruto rastreamento, e após a gravação se à esquerda ou à direita membros bater a plataforma de força, o arquivo é salvo e fechado. Igual número de visitas forceplate esquerdo e direito dos membros devem ser registrados. O processo de gravação dos dados de uma execução é repetido até que um número suficiente de roda foram registrados.
6. Análise de Dados
Após completar a coleta de dados para cinemática e as forças de reação do solo, cada execução de cada animal precisa de ser avaliado para a velocidade. Utilizando dois marcadores relativamente fixa (por exemplo, as asas do iliums) pode-se avaliar um ponto virtual entre os marcadores (feito antes ao criar um modelo de arquivo Vicon Motus). Antes de calcular a velocidade desse ponto "virtual", os marcadores para os marcadores ilíaca deve ser digitalizado. Usando Vicon motus software, a velocidade deste ponto virtual no X-direção (direção horizontal do movimento) é calculado. Ao fazer isso, só é executado dentro de um determinado intervalo velocidades (determinado a priori) são utilizados nas análises finais. Descobrimos que os animais se deslocam entre 60-90 cm / s estão usando consistente gaits trote. Um mínimo de 10 provas (5 pistas onde o membro esquerdo faz contato com a plataforma de força e 5 pistas onde o membro direito faz contato com a plataforma de força) são obrigatórios. Uma vez que o executado aceitáveis são identificados para cada animal, a digitalização dos marcadores pele restante deve ser completado.
Para compensar artefato pele movimento sobre o joelho, a estimativa da posição do joelho é calculado usando triangulação (intersecção entre dois círculos cinemática 2D, ou intersecção entre duas esferas 3D cinemática), como foi descrito anteriormente. Ângulos do quadril, joelho e jarrete, velocidades e acelerações podem ser determinadas. Apoio e balanço vezes também pode ser avaliada, embora a sua precisão é limitada baseada na velocidade de amostragem das câmeras serem empregados. Estes e outros cálculos podem ser executados diretamente (ou seja, sem exportação) usando Vicon Motus KineCalc software, ou dados podem ser exportados como dados ASCII e analisados utilizando rotinas personalizável no software, tais como MatLab.
Dados chão força de reação é medida e amplificada pela plataforma de força AMTI e recolhidos em 1200 Hz por Vicon Motus. Como tal, uma vez que o chão força de reação de dados são coletados, uma adequada filtro digital é aplicado aos dados usando Motus Vicon. Dado que o experimentador já determinou a velocidade das viagens e identificou corre aceitável após digitalização marcadores apropriados, os dados de força de reação do solo que foi coletado, simultaneamente, como os dados de cinemática, podem ser analisados usando Vicon Motus KineCalc diretamente, ou indiretamente usando algum outro software personalizável rotina. Uma variedade de variáveis para as forças, em cada uma das três direções ortogonais, pode ser calculada. Essas variáveis incluem pico de força, und área da curva (ie impulso), etc É importante ressaltar, no entanto, o pesquisador deve manter os dados dos membros direito e esquerdo para cada execução de cada animal em separado. Dados extraídos dos membros direita ou esquerda é feita a média para cada animal e usado como dados representativos para esse animal. Dados são então analisados por procedimentos estatísticos apropriados.
7. Resultados representante
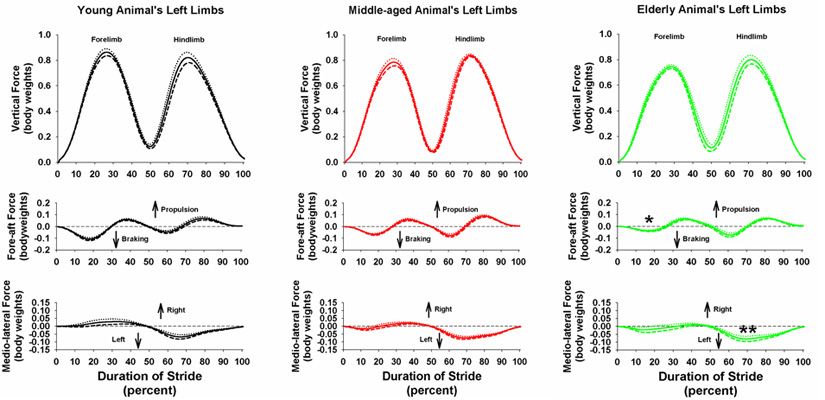
Para representar a utilidade desta forma de análise locomotor, cinemática e forças de reação do solo foram determinados para os jovens, de meia-idade, e geriátrica ratas Wistar. A partir desta análise, relacionadas com a idade foram encontradas diferenças de ratas Wistar. Em particular, a análise do solo força de reação demonstra que ratos geriátricos reduziram forelimb capacidade de frenagem e tendem a usar suas patas traseiras mais para estabilização lateral em comparação com os outros grupos de animais (Figura 1). Análise cinemática não revelou nenhuma diferença significativa entre cada grupo, porém demonstra que a cinemática pode ser facilmente gravado a partir de praticamente qualquer idade de rato (Figura 2).

Figura 1 força de reação do solo rastreamento retirados os membros esquerdo da jovem. (4 meses de idade; n = 7), de meia-idade (13-14 meses de idade; n = 7), e geriátrica (24 meses de idade; n = 5) ratas Wistar. Membros direito foram semelhantes. É facilmente perceptível que os ratos geriátricos usar suas patas dianteiras para menos de frenagem (* = p <0,05) em comparação com ratos jovens e de meia-idade, e ratos geriátricos tendem a usar suas patas traseiras mais para estabilização lateral em comparação com ratos jovens (**). Linhas sólidas representam a média, linhas pontilhadas representam a média + SE; tracejadalinhas representam a média SE. Clique aqui para ver uma figura maior.

Figura 2. Figuras cinemática para o membro esquerdo de ratos jovens, de meia-idade e idosos. Figuras da vara representar o movimento médio da perna esquerda para cada um dos grupos. Não houve diferenças significativas entre os grupos de animais para ângulo da articulação durante o ciclo de passo. Clique aqui para ver uma figura maior.
Discussion
O presente trabalho fornece metodologia para avaliar a locomoção contínua usando cinemática quantitativa e determinação força de reação do solo. Importante para qualquer pessoa interessada em empreender essa metodologia é uma sólida experiência em biomecânica da locomoção, comportamento animal sensório-motor, e gerenciamento de dados e manipulação. Embora a determinação força de cinemática e de reação do solo exige mais tempo e expertise, em comparação com outras formas de análise locomotor (medidas endpoint por exemplo, escalas de classificação ordinal), os dados obtidos é sensível, objetiva e quantitativa para uma variedade de 14-22 ortopédicos e neurológicos 1-3, 23-32 modelos de doença, em uma variedade de espécies.
Nós fornecemos dados que descrevem diferenças na locomoção entre as idades diversas informações tensão pareados ratos que não poderia ser adquirida através de medidas simples e menos sensíveis. Além disso, análise cinemática e cinética de locomoção foi utilizado para descrever alterações locomotor em uma variedade de condições do sistema nervoso, onde outras formas de avaliação seria vencida. 8, 23-25, 27 O uso de medidas sensíveis se torna especialmente importante quando se avalia o potencial therapeutants para vários modelos de doença. Se um teste não é sensível o suficiente para discernir um efeito de um potencial therapeutant o pesquisador corre o risco de cometer um erro tipo II estatística (ou seja, concluir que não há efeito de um tratamento, quando na verdade houve um efeito). Além disso, como medidas de desfecho e os testes mais subjetiva que avaliam a locomoção, existe um potencial de viés. Avaliação cinemática e cinética é puramente objetiva, em que, desde que critério de inclusão / exclusão apropriados são feitos a priori, o pesquisador simplesmente recolhe, analisa e aplica estatísticas apropriadas aos dados (ou seja, não existe nenhum componente subjetivo para determinação de dados).
Análise cinemática e cinética também proporciona a capacidade de ser usado para uma infinidade de espécies. Na verdade, a cinemática, determinação força de reação do solo, ou ambos têm sido usados em uma variedade de espécies como elefantes 33-35, gado 36, 37-40 cavalos, cães 4, 41-45, 21 gatos, 46-49, vários roedores 3, 8, 50, 51, pássaros 4, 52-55, e peixes 56, 57 (esta lista não é de forma exaustiva). Na experiência dos autores, no entanto, o uso de ratos é problemático dado que os ratos não são fáceis de operantly condição para viajar ao longo de uma pista. Diante disso, os ratos não viajará a uma velocidade relativamente constante e, em vez da velocidade-up e slow-down ao atravessar a pista. Este comportamento pode provavelmente, em parte, ser superado pela execução ratos em esteira e filmando o locomoting animais na esteira. 58 Se o aparato experimental para a determinação força de reação do solo deveria ser modificado para o uso escada rolante, terra determinação força de reação seria provavelmente só ser facilmente obtidos para força vertical de reação do solo como a correia da escada rolante iria interferir com a frente-ré e medio-lateral determinação força.
Ao todo, análise cinemática e cinética de locomoção é um método confiável, sensível e objetivo que pode ser empregada para diversos modelos de condições ortopédicas e neurológicas. Além disso, todo o equipamento tornou-se disponível para uso em roedores, negando assim qualquer motivo relacionado para a não realização deste tipo de análise comportamental sensório-motor.
Disclosures
Não há conflitos de interesse declarados.
Acknowledgments
Esta pesquisa foi suportada por uma concessão de Descoberta a AAW das Ciências Naturais e Engenharia Council of Canada.
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J. Biomechanics of locomotion in Asian elephants. J. Exp. Biol. 213, 694-706 (2010).
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M. Trunk deformation in the trotting horse. Equine Vet. J. 41, 203-206 (2009).
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R. Penguin waddling is not wasteful. Nature. 408, 929-929 (2000).
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}