

Summary
Locomoción es a menudo examinado como un resultado del comportamiento de los distintos modelos de la enfermedad en campos como la neurociencia y la ortopedia. Este documento tiene la intención de vídeo para describir un método de recogida de las fuerzas de reacción del suelo y la cinemática de las ratas durante la locomoción sin restricciones.
Abstract
Comportamiento, en su acepción más amplia, se puede definir como la manifestación del motor de los procesos fisiológicos. Por lo tanto, todas las conductas se manifiestan a través del sistema motor. En los campos de la neurología y ortopedia, la locomoción es un comportamiento común para evaluar una variedad de modelos de la enfermedad. Por ejemplo, la recuperación después de una lesión traumática del aparato locomotor en el sistema nervioso es uno de los comportamientos más comúnmente evaluados 1-3. A pesar de locomoción puede ser evaluada utilizando una variedad de mediciones de punto final (por ejemplo, tiempo necesario para completar una tarea motriz, etc), medidas semicuantitativas cinemáticas (por ejemplo, escalas ordinales de calificación (por ejemplo, Beattie Basso y del aparato locomotor Bresnahan (BBB) escala de calificación, etc)) y sustitutos medidas de comportamiento (por ejemplo, la fuerza muscular, la velocidad de conducción nerviosa, etc), sólo la cinética (las medidas de fuerza) y la cinemática (mediciones de los segmentos corporales en el espacio) proporcionar una descripción detallada de la estrategia mediante la cual un animal es capaz de locomoción 1. Aunque no nuevas medidas, cinemáticos y cinéticos de los roedores locomoción es ahora más accesible gracias a la disponibilidad de los equipos disponibles en el mercado diseñados para este propósito. Es importante destacar, sin embargo, los investigadores deben estar muy familiarizados con la teoría de los análisis biomecánicos y entender los beneficios y limitaciones de estas formas de análisis antes de embarcarse en lo que se convertirá en un estudio relativamente intensiva en trabajo. El presente documento tiene por objeto describir un método de recogida de datos cinemática y la reacción de las fuerzas terrestres con equipos disponibles en el mercado. Detalles de los equipos y aparatos de puesta en marcha, pre-entrenamiento de los animales, criterios de inclusión y exclusión de las carreras aceptable, y los métodos para la recogida de datos se describen. Se ilustra la utilidad de esta técnica de análisis de comportamiento mediante la descripción de la cinemática y la cinética de la cepa de concordancia adulto joven, de mediana edad, y las ratas geriátricos.
Protocol
1. Pre-requisitos para el análisis biomecánico Locomotion
Antes de embarcarse en la compra de equipos costosos análisis del aparato locomotor, y la planificación de los experimentos en la cinemática y / o la evaluación del aparato locomotor cinética se llevará a cabo, es imprescindible que el investigador esté familiarizado con los aspectos técnicos y prácticos de análisis biomecánico, el comportamiento sensorio, el condicionamiento operante de los animales , y el manejo / conservación / administración de grandes cantidades de datos digitalizados. A pesar de estos pre-requisitos parecer obvio para muchos, es sólo después de embarcarse en este tipo de experimentos en los que los alumnos se dan cuenta de las complejidades técnicas y prácticas de la realización de análisis relativamente detallado del aparato locomotor. Los autores recomiendan que los experimentadores inscribirse en un curso sobre biomecánica de introducción, estar familiarizado con o contratar a alguien familiarizado con un lenguaje de programación necesarios para la gestión de datos, y de igual importancia, pasan bastante tiempo interactuando, manejo y trabajo con animales de laboratorio. Para comprender el análisis de la locomoción y el análisis sensorio de comportamiento en las neurociencias, los investigadores se refieren a varias referencias importantes (ver 1, 4-7).
2. Prueba cinemáticos y cinéticos aparato
Un aparato de prueba cinemáticos y cinéticos, útil para la recogida de datos bilaterales, se compone de los siguientes componentes (ver "Tabla de los reactivos y equipos específicos" para más detalles):
- Habitación tranquila y de tamaño suficiente (no necesariamente a prueba de sonido, aunque está ubicado en una zona con poco tráfico)
- Radio de la oferta de fondo de "ruido" para limitar los ruidos de distracción fuera de la sala a los animales
- Plexiglás transparente, cerrada, plana superficie de la pista (180 cm de largo x 20 cm de ancho X 60 cm de alto) con un agujero cuadrado (11 cm X 11 cm), ubicado en el centro de la pista, equidistante de los extremos
- Pedazo de plexiglás (10,5 cm X 10,5 cm)
- Cinta de doble cara adhesiva Scotch
- Reflectantes 3M cinta adhesiva para los marcadores de la piel
- Perforaciones para la creación de marcadores de
- Máquina de anestesia con isofluorano para los animales anestesia para el afeitado antes de la colocación de los marcadores de
- Cheerios para fomentar el movimiento de los animales a lo largo de la longitud de la pista
- AMTI HE6X6 forceplate
- Vicon Motus personalizada del sistema (software, equipo, etc)
- 4 cámaras de vídeo (por lo menos 60 muestras Hz) y trípodes con cables de conexión apropiada
- 4 ante la cámara las luces halógenas proporciona una iluminación óptima para la iluminación de la materia animal y los marcadores de reflexión
- Marco apropiado de calibración de tamaño o el volumen necesario para el sistema Vicon Motus para calibrar x, y, z posiciones en las medidas de distancia significativa
3. Animal de formación
Antes de la recolección de datos, cada animal debe ser entrenado para cruzar una superficie plana, la pista cerrada. Tras la recepción de las ratas de un proveedor con animales, los animales deben aclimatarse a su nuevo hogar durante 1 semana. Durante este tiempo de aclimatación, cheerios varios se colocan todos los días en la jaula de la rata. Los animales son los alimentos restringidos a sus necesidades de mantenimiento de energía para prevenir la obesidad y garantizar la motivación para realizar esta tarea. A partir de entonces, cada animal es manejado por el investigador durante 10-15 minutos al día durante 1 semana. Durante este mismo período de tiempo, cada animal es colocado en la pista con Cheerios situado en cada extremo. Una vez que el animal se familiarice con su entorno, se empiezan a comer los cereales Cheerios. Una vez que el animal está cómodo y cheerios comer dentro de la pista, el experimentador debe operantemente la condición del animal para ejecutar la longitud de la pista de una recompensa alimenticia. Esto se logra tirando cheerio ¼ en el extremo opuesto de la pista donde se coloca la rata. Una vez que la rata come de este cereal de desayuno, otro ¼ ¡hasta la vista se coloca en el otro extremo de la pista. Esto se hace durante 15-20 minutos al día hasta que se mueve la rata constante (> 90% de los lanzamientos) a lo largo de la pista a una velocidad constante (es decir, sin iniciar, detener, explorar, o sin cambio de marcha) para comer el cereal de desayuno, sin galopar / delimitador . La rata sólo se debe emplear un modo de andar al trote. El exceso de acondicionamiento de los animales para esta tarea puede llevar a los animales galopando y brincando estos aires son indicativos de los animales que viajan> 90 cm / s. Delimitación y el galope aires, biomecánica, son más difíciles de interpretar para una variedad de razones (por ejemplo, la pierna criterios de inclusión de plomo, etc.) En nuestra experiencia, una vez que las ratas siempre emplean galopando o saltando aires, es difícil, si no imposible, que usen una marcha al trote, mientras locomoción en la pista. Velocidades> 90 cm / s se ven raramente después de que un animal ha sufrido de una lesión del sistema nervioso central o periférico. Tiempo para alcanzar el éxito de la capacitación es variable entre las cepas y los sexos de las ratas. Wistar, Lewis, Long Evans-, y las cepas Sprague-Dawley, son capaces de atravesar constantemente la pista dentro de 2 semanas desde el inicio de entrenamiento de 8. En nuestra experiencia, Fischer (F-344) las ratas tienden a tomar más de 4-6 semanas para aprender esta tarea 8.
4. Posición común de marcado
El análisis cinemático de miembro superior es poco fiable debido a los artefactos piel circulación impuestas por la colocación de los marcadores de la piel en las extremidades anteriores, que se agrava en las especies, como las ratas, que tienen una postura agachada 9. En cambio, la cinemática de las extremidades anteriores se debe lograr mediante rayos X o fluoroscopia cinematografía 10-13. Como tal, la extremidad posterior colocación conjunta marcador de posición sólo se describe en este documento.
Antes de la recolección de datos, cada rata se anestesió al menos 24 horas antes de la recolección de datos mediante una adecuada anestesia inhalatoria (por ejemplo, isofluorano, 1.5-2% marcado en una vaporizor de precisión) y se administra en oxígeno a través de mascarilla, y anatómica topográfica clave puntos de referencia debe ser marcada. Dada la brevedad del procedimiento, y por agentes de acción prolongada de anestesia no se utilizan, el uso de un dispositivo de calentamiento de los animales no tiene que ser utilizado para mantener la temperatura corporal del animal. Una vez que el animal esté anestesiado, los miembros posteriores y el dorso, hasta el nivel de las crestas ilíacas están afeitadas. El animal se coloca en decúbito esternal y sus patas traseras se colocan en una posición de pie aproximada usando espuma de la empresa de embalaje para apoyarlo. La piel que cubre las porciones más craneales de las crestas ilíacas, trocánter mayor del fémur, la tuberosidad tibial lateral, la articulación del tarso, y la parte distal y lateral del 5 º metatarsiano está marcado con un marcador permanente que no sean tóxicas. El animal se recupera de la anestesia. Para los estudios de temporal, la anestesia puede ser periódica deben afeitarse las patas traseras lo que permite la posterior colocación reflectante (ver más abajo). Además, todos los días destacando de los hitos anatómicos previamente marcada (con el mismo marcador no tóxico) se requiere que las ratas lentamente quitar los marcadores a través del comportamiento natural de la preparación.
5. Registro de datos
Todas las vistas de cámara se examinan para asegurar que su posición es adecuada y la captura del mismo campo de visión. Cada cámara se debe colocar a unos 60-80 grados el uno al otro. El campo de visión debe incluir la forceplate en el centro y una longitud de pista suficiente para capturar a dos pasos.
El volumen de calibración se coloca dentro del área de pre-determinado de la pista. Una sola imagen de que el volumen de calibración dentro de la pista, de cada una de las cámaras, es capturado. Todas las marcas calibradas a lo largo de la longitud de cada uno de los polos están digitalizados. Sólo una vez un error satisfactoria en la digitalización se lleva a cabo, el investigador puede proceder a la recogida de datos del aparato locomotor. Este proceso de calibración es fundamental antes de la recolección de datos. Si la calibración no se realiza correctamente, o si la calibración no se produce inmediatamente antes de una sesión de grabación, todos los datos resultantes serán imprecisos e inutilizables. Es importante destacar que, si alguna de las cámaras se toca o mueve, lo más seguro es asumir que la calibración del sistema necesita ser repetido.
Inmediatamente antes de colocar al animal en la pista, su peso se registra y se hizo pre-cónica marcadores de reflexión (con cinta reflectante 3M, véase la tabla) se adhieren a las marcas predeterminadas fieltro de los hitos topográficos extremidades traseras. Grabación de peso del animal permitirá la normalización retrospectiva de las fuerzas de reacción del suelo con el peso corporal - un aspecto importante si se desea hacer comparaciones entre los grupos. Además, la medición de peso corporal facilita el seguimiento de la salud general del animal para la duración del experimento. La colocación de marcadores sólo requiere de un manejo adecuado de los animales y no requiere anestesia del animal. Si el adhesivo sobre la cinta reflectante no es suficiente para adherirse a la piel del animal, una cantidad muy pequeña de pegamento no tóxico (por ejemplo, 3M adhesivo tisular VetBond) se puede utilizar para facilitar la adhesión de la marca en el cuerpo del animal. Una vez que los marcadores se colocan en las patas traseras, el experimentador debe estar en una posición cómoda al lado del teclado de la computadora y tener a mano el marcador de eventos asociados a través del sistema Vicon Motus. Utilizando el archivo de calibrado como una plantilla, varios archivos se hacen por adelantado de la grabación. Por lo general, 25 a 30 archivos necesitan ser salvos. Cada archivo debe tener un nombre único. Cada archivo se representa un grabado de ejecución de los animales que se está grabando. Veinticinco a treinta archivos son necesarios para asegurar que un número suficiente de carreras reunión de la velocidad criterio de inclusión (es decir, 60-90 cm / s) se recogen. Después de un número suficiente de los archivos se crean que el experimentador puede comenzar a recolectar datos. El experimenter deben llevar a la rata de traslado dentro de la pista, lanzando pedazos de ¼ de Cheerios en cada extremo de la pista. Con la coordinación y tiempos, el marcador de evento se activa al inicio y justo antes de la finalización de la rata de completar con éxito un pase largo de la pista. Después de examinar la fuerza de reacción crudo localización, y después de la grabación ya sea la izquierda o hacia las extremidades derechas golpear la plataforma de fuerza, el archivo se guarda y se cierra. Igual número de accesos forceplate izquierdo y derecho del miembro deben ser registrados. El proceso de grabación de los datos de un plazo determinado se repite hasta que un número suficiente de pistas han sido grabadas.
6. Análisis de Datos
Al término de la recolección de datos de la cinemática y las fuerzas de reacción del suelo, cada ejecución de cada animal debe ser evaluada por la velocidad. El uso de dos marcadores relativamente fijas (por ejemplo, las alas de la iliums) se puede evaluar un punto virtual entre los marcadores (que se hace antes de la hora de crear una plantilla de Vicon Motus archivo). Antes de calcular la velocidad de este "virtual" punto, los marcadores de los marcadores ilíaca debe ser digitalizado. Usando Vicon motus software, la velocidad de este punto virtual en la dirección X (horizontal del movimiento) se calcula. De este modo, sólo se ejecuta dentro de un rango de velocidades dado (determinado a priori) se utilizan en el análisis final. Nos encontramos con que los animales se mueven entre 60-90 cm / s se utiliza correctamente aires al trote. Un mínimo de 10 carreras (5 carreras en la extremidad izquierda se pone en contacto con la plataforma de fuerza y cinco carreras en la extremidad derecha se pone en contacto con la plataforma de fuerza) son obligatorios. Una vez que las carreras aceptables se identifican para cada animal, la digitalización de los marcadores de la piel restante deberá ser completado.
Para compensar la piel artefacto de movimiento en la rodilla, la estimación de la posición de la rodilla se calcula utilizando la triangulación (intersección de dos círculos de la cinemática en 2D, o la intersección entre dos esferas 3D cinemática), como se ha descrito anteriormente. Ángulos de cadera, rodilla y corvejón, velocidades y aceleraciones se puede determinar ahora. Apoyo e impulsión veces también puede ser evaluado, aunque su precisión es limitada basada en la velocidad de muestreo de las cámaras empleadas. Estos y otros cálculos se pueden realizar directamente (es decir, sin exportación) con software Vicon Motus KineCalc, o los datos se pueden exportar como datos ASCII y se analizaron utilizando rutinas personalizadas de software tales como Matlab.
Baja los datos de fuerza de reacción se mide y se amplifica por la plataforma de fuerza AMTI y se percibirá en 1200 Hz por Vicon Motus. Como tal, una vez que los datos de la fuerza de reacción del suelo se recoge, un adecuado filtro digital se aplica a los datos utilizando Motus Vicon. Dado que el investigador ya ha determinado la velocidad de desplazamiento y se identificaron corre aceptable después de la digitalización de los marcadores adecuados piel, baja los datos de fuerza de reacción que se recogió de forma simultánea como la cinemática de datos, se pueden analizar usando Vicon Motus KineCalc directamente, o indirectamente a través de un software personalizable otros de rutina. Una variedad de variables de las fuerzas, en cada una de las tres direcciones ortogonales, se puede calcular. Estas variables incluyen el pico de fuerza, und área de la curva (es decir, impulso), etc Es importante destacar, sin embargo, el experimentador debe mantener los datos de las extremidades derecha e izquierda de cada ejecución de cada animal por separado. Los datos extraídos de las extremidades derecha o la izquierda es un promedio para cada animal y se utiliza como datos representativos para ese animal. Datos se analizaron mediante procedimientos estadísticos adecuados.
7. Resultados representante
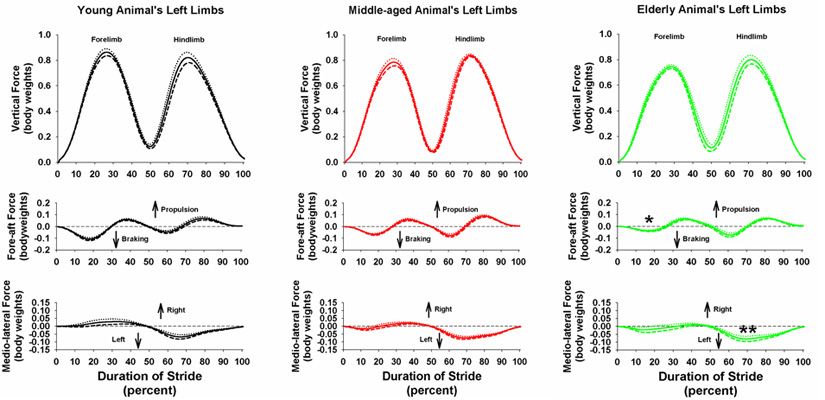
Para representar a la utilidad de esta forma de análisis del aparato locomotor, la cinemática y las fuerzas de reacción del suelo se determinaron en ratas hembras jóvenes, de mediana edad, geriátricos y Wistar. A partir de este análisis, relacionada con la edad se encontraron diferencias en ratas Wistar. En particular, la fuerza de reacción del suelo el análisis demuestra que las ratas geriátrica han reducido la capacidad de frenado y patas delanteras tienden a usar sus patas traseras más para la estabilización lateral en comparación con los otros grupos de animales (Figura 1). Análisis cinemático no reveló ninguna diferencia estadística entre cada grupo, aunque demuestra que la cinemática puede ser fácilmente grabados desde casi cualquier edad de la rata (Figura 2).

Figura 1 fuerza de reacción de seguimiento tomadas de las extremidades izquierdas de los jóvenes. (4 meses de edad, n = 7), de mediana edad (13-14 meses de edad, n = 7) y geriátrica (24 meses de edad, n = 5) mujeres ratas Wistar. Extremidades derechas fueron similares. Es evidente que las ratas utilizan sus patas delanteras geriátrica menos de frenado (* = p <0,05) en comparación con las ratas jóvenes y de mediana edad, y las ratas geriátricos tienden a usar sus patas traseras más para la estabilización lateral en comparación con las ratas jóvenes (**). Las líneas continuas representan las líneas de media, de puntos representan la media ± SE; discontinualíneas representan la media SE. Haga clic aquí para ver una figura más grande.

Figura 2. Cinemática cifras palo de la extremidad izquierda de ratas jóvenes, de mediana edad, y geriátricos. Figuras de palo representa el movimiento medio de la pierna izquierda de cada uno de los grupos. No hubo diferencias significativas entre los grupos de animales para el ángulo de la articulación durante el ciclo de paso. Haga clic aquí para ver una figura más grande.
Discussion
El presente documento ofrece una metodología para la evaluación de la locomoción continua con la cinemática y la determinación cuantitativa de reacción del suelo vigente. Importante para cualquier persona interesada en embarcarse en esta metodología es una gran experiencia en la biomecánica de la locomoción, el comportamiento animal sensoriomotor, y el manejo y manipulación de datos. A pesar de la determinación de fuerza de reacción cinemática y la tierra requiere más tiempo y experiencia, en comparación con otras formas de análisis del aparato locomotor (por ejemplo, medidas de punto final, las escalas ordinales rating), los datos obtenidos es sensible, objetiva y cuantitativa para una variedad de aparatos ortopédicos y neurológicos 14-22 1-3, 23-32 modelos de la enfermedad, en una gran variedad de especies.
Nos han proporcionado datos que se describen las diferencias en la locomoción entre las diferentes edades de la tensión de concordancia información ratas que no se podía deducir con medidas sencillas y menos sensibles. Además, el análisis cinemáticos y cinéticos de la locomoción se ha utilizado para describir las alteraciones del aparato locomotor en una variedad de condiciones del sistema nervioso, donde otras formas de evaluación no tendría éxito. 8, 23-25, 27 El uso de las medidas de sensibilidad es especialmente importante cuando se evalúan productos terapéuticos potenciales para varios modelos de la enfermedad. Si una prueba no es lo suficientemente sensible para discernir el efecto de un potencial therapeutant el investigador corre el riesgo de cometer un error tipo II estadística (es decir, concluir que no hay efecto de un tratamiento cuando en realidad no era un efecto). Además, debido a las medidas de punto final y las pruebas más subjetivas que evalúan la locomoción, existe una posibilidad de sesgo. Evaluación cinemáticos y cinéticos es puramente objetiva en que, siempre que proceda de inclusión / exclusión criterio se hacen a priori, el experimentador simplemente recopila, analiza y aplica las estadísticas apropiadas a los datos (es decir, no hay un componente subjetivo de la determinación de los datos).
Análisis cinemático y cinético también ofrece la capacidad de ser utilizado para multitud de especies. De hecho, la cinemática, la determinación de la fuerza de reacción del suelo, o ambos han sido utilizados en una variedad de especies como los elefantes 33-35, ganado 36, 37-40 caballos, los perros 4, 41-45, 21 gatos, 46 a 49, varios roedores 3, 8, 50, 51, 4 aves, 52-55, y el pescado de 56 años, 57 (esta lista no es exhaustiva). En la experiencia de los autores, sin embargo, el uso de ratones es problemático, dado que los ratones no son fáciles de operantemente condiciones de viajar a lo largo de una pista de aterrizaje. Ante esto, los ratones no viajará a una velocidad relativamente constante y en lugar de acelerar y frenar, al atravesar la pista de aterrizaje. Este comportamiento probablemente se puede, en parte, ser superados mediante la ejecución de los ratones en una cinta y 58 video-grabación de la locomoción de los animales en la cinta. Si el aparato experimental para la determinación de la fuerza de reacción del suelo debía ser modificada para el uso de cinta de correr, la fuerza de reacción del suelo que la determinación probablemente sólo se obtienen fácilmente de fuerza de reacción vertical del suelo como el cinturón de cinta podría interferir con proa a popa y medio-lateral determinación de la fuerza.
En total, el análisis cinemático y cinético de locomoción es un método fiable y sensible, y el objetivo que se puede emplear para varios modelos de las condiciones ortopédicas y neurológicas. Además, todo el equipo se ha convertido en disponible para su uso en los roedores, lo que niega cualquier motivo relacionado para no realizar este tipo de análisis de comportamiento sensorio.
Disclosures
No hay conflictos de interés declarado.
Acknowledgments
Esta investigación fue financiada por una subvención a la AAW Descubrimiento de las Ciencias Naturales e Ingeniería de Investigación de Canadá.
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J.
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M.
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R.
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}