

Summary
Rörelseorganen är ofta behandlats som en beteendevetenskaplig utfall i olika modeller av sjukdomar inom områden som neurovetenskap och ortopedi. Denna video dokument är att beskriva en metod för att samla in markstyrkor reaktion och kinematik från råtta under ohämmad rörelseförmåga.
Abstract
Beteende, i sin bredaste definition, kan definieras som motorn manifestation av fysiologiska processer. Som sådan, alla beteenden manifestera genom motorns system. På områdena neurovetenskap och ortopedi, är förflyttning ett vanligt utvärderas beteende för en mängd olika sjukdomar modeller. Till exempel är rörelseaktivitet återhämtning efter traumatisk skada på nervsystemet en av de mest utvärderade beteenden 1-3. Även rörelseorganen kan utvärderas med hjälp av olika effektmått mätningar (t.ex. tid det tar att slutföra en motorisk uppgift, etc), semikvantitativ kinematiska åtgärder (t.ex. ordningstal skattningsskalor (t.ex. Basso Beattie och Bresnahan rörelseapparaten (BBB) skattningsskala, etc)) och surrogat åtgärder av beteende (t.ex. muskelstyrka, nervledningshastighet, etc), endast kinetik (kraft mätningar) och kinematik (mätningar av kroppens segment i rymden) ger en detaljerad beskrivning av den strategi med vilken ett djur kan locomote 1. Även om inte nya, kinematiska och kinetiska mätningar av locomoting gnagare är nu mer lättillgängliga på grund av tillgången på kommersiellt tillgänglig utrustning avsedd för detta ändamål. Viktigt är dock praktiker måste vara mycket bekant med teorin om biomekaniska analyser och förstå fördelarna och begränsningar av dessa former av analyser före igångsättning av vad som kommer att bli en relativt arbetsintensiv studie. Detta dokument syftar till att beskriva en metod för att samla kinematisk och mark uppgifter insatsstyrka med kommersiellt tillgänglig utrustning. Information om utrustning och apparater set-up, är förberedande utbildning av djur, kriterier för medtagande och uteslutning av acceptabel körningar, och metoder för att samla in de uppgifter som beskrivs. Vi illustrerar nyttan av denna beteendeanalys teknik genom att beskriva kinematik och kinetik för stam matchade unga vuxna, medelålders och geriatriska råttor.
Protocol
1. Förutsättningar för Biomekaniska Locomotion Analyser
Innan man inleder köpa dyr utrustning rörelseorganen analys och planering av experiment där kinematik och / eller kinetiska rörelseapparaten bedömning kommer att utföras, är det absolut nödvändigt att försöksledaren vara förtrogen med tekniska och praktiska aspekter av biomekaniska analyser, motoriska beteende, operant betingning av djur och hantering / lagring / hantering av stora mängder datafiler. Även om dessa förutsättningar verka självklart för många, är det först efter att sätta i gång dessa typer av experiment där deltagarna att inse de tekniska och praktiska svårigheterna i att utföra relativt detaljerade rörelseapparaten analys. Författarna rekommenderar att praktiker anmäla dig till en kurs som behandlar inledande biomekanik, känna eller anlita någon som känner till ett programmeringsspråk som behövs för datahantering, och lika viktigt, spendera mycket tid att interagera, hantering och arbete med försöksdjur. För att förstå rörelseorganen analys och sensomotoriska beteendeanalys i neurovetenskap, är praktiker som avses flera viktiga referenser (se 1, 4-7).
2. Kinematisk och kinetisk testapparater
En kinematisk och kinetisk testapparater, användbar för att samla bilaterala data, består av följande komponenter (se "Tabell över specifika reagenser och utrustning" för mer detaljer):
- Tyst och tillräckligt stort rum (inte nödvändigtvis ljudisolerade, men som ligger i en låg-trafik-området)
- Radio för att leverera bakgrunden "brus" för att begränsa störande ljud från utsidan av rummet för att djuren
- Klart plexiglas, slutna, platt-rullbanan (180 cm lång x 20 cm bred x 60 cm hög) med ett fyrkantigt hål (11 cm x 11 cm) ligger i centrum av banan lika långt från endera änden
- Piece of plexi-glas (10,5 cm x 10,5 cm)
- Dubbelhäftande tejp
- 3M reflekterande tejp för huden markörer
- Hålslag för att skapa huden markörer
- Isofluorane anestesiapparaten krävs för anesthetizing djur för rakning innan placering av huden markörer
- Cheerios för att uppmuntra rörelse av djur längs banan
- AMTI HE6X6 forceplate
- Vicon Motus kundanpassade system (programvara, dator, etc)
- 4 videokameror (minst 60 Hz provtagning) och stativ med lämpliga anslutningskablar
- 4 kamera monterade halogenlampor ger optimal belysning för belysning av djuret ämnet och reflekterande markörer huden
- Lämplig storlek kalibrering ram eller volym som behövs för Vicon Motus-system för att kalibrera x, y, z positioner till meningsfulla avstånd åtgärder
3. Animal Training
Innan insamling av data, måste varje djur tränas att korsa en platt yta, sluten bana. Vid mottagande av råttor från ett lämpligt djur leverantör bör djuren anpassat sig till sitt nya hem för en vecka. Under denna acklimatisering tid finns flera Cheerios placeras dagligen i råttans bur. Djur är mat begränsade till deras krav underhåll energi för att förebygga fetma och säkerställa motivation att utföra denna uppgift. Därefter är varje djur hanteras av försöksledaren i 10-15 minuter dagligen under 1 vecka. Under samma period har varje djur placeras i banan med Cheerios ligger i båda ändar. När djuret blir bekant med sin omgivning, kommer de att börja äta Cheerios. När djuret är bekvämt och äter Cheerios i banan, försöksledaren måste då operantly kondition djuret att köra längden på banan för ett livsmedel belöning. Detta uppnås genom att kasta ¼ Cheerio till den motsatta änden av startbanan där råttan är placerad. När råttan äter detta Cheerio, är en annan ¼ Cheerio placeras i andra änden av landningsbanan. Detta görs i 15-20 minuter dagligen tills råttan konsekvent (> 90% av kastar) rör sig längs banan vid en konstant hastighet (dvs utan att starta, stoppa, utforska, eller utan att ändra gång) för att äta Cheerio utan galopperande / bounding . Råttan ska endast anställa en traven. Över-preparering av djur till denna uppgift kan leda till djur galopperande och bounding dessa gångarter är vägledande för djur som reser> 90 cm / s. Avgränsande och galopperande gångarter, biomekaniskt, är svårare att tolka för en rad olika skäl (t.ex. ben bly inklusionskriterier, etc). Enligt vår erfarenhet när råttorna konsekvent anställa galopp eller begränsningsramen gångarter, är det svårt, om inte omöjligt att få dem att använda en traven när locomoting i banan. Hastigheter> 90 cm / s är sällan ses efter ett djur har lidit av perifera eller centrala nervsystemet skada. Tid att nå en framgångsrik utbildning är VariaBLE mellan stammar och kön hos råttor. Wistar, Lewis, Long-Evans, och Sprague-Dawley stammar har möjlighet att konsekvent korsa banan inom 2 veckor från början av utbildning 8. Enligt vår erfarenhet Fischer (F-344) råttor tenderar att ta uppemot 4-6 veckor att lära sig denna uppgift 8.
4. Gemensam ståndpunkt Märkning
Forelimb kinematisk analys är otillförlitligt på grund av huden rörelse artefakt som införts genom att huden markörer på frambenen som förvärras i arter, som råttor, som har en hukade hållning 9. I stället måste kinematik av frambenen ska uppnås med hjälp av röntgen kino-eller genomlysning 10-13. Som sådan bakbenen gemensamma positionsmarkör placering är bara beskrivs häri.
Innan insamling av data, måste varje råtta vara sövd minst 24 timmar i förväg för datainsamling med hjälp av en lämplig inhalationsanestesi bedövning (t.ex. isofluorane, 1,5-2% slagna på en precision vaporizor) och förvaltas i syrgas via ansiktsmask, och nyckel topografiska anatomiska landmärken måste märkas. Med tanke på den korta förfarandet, och eftersom långverkande anestesimedel inte används, användning av djur uppvärmning anordning behöver inte användas för att hålla djurets kroppstemperatur. När djuret bedövas, det bakbenen och dorsum, till nivån på iliaca kammar är renrakad. Djuret placeras sedan i sternal VILA och dess bakben är placerade i en ungefärlig stående med fast packning skum att stödja det. Huden överliggande i hjärn-mest delar av iliaca kammar, desto större trochanter av lårbenet, i sidled tibial ischii, den böjd gemensamma och distala och laterala delen av 5: e metatarsal markerade med en giftfri permanent märkpenna. Djuret återhämtat sig från narkos. För temporal studier kan periodiska anestesi krävas att raka bakben vilket möjliggör efterföljande reflekterande markör placering (se nedan). Dessutom kommer varje dag att lyfta fram av den tidigare markerade anatomiska landmärken (med samma giftfria markör) krävas som råttorna sakta kommer att ta bort markörer genom naturliga grooming beteende.
5. Dataregistrering
Alla kameravyer granskas för att säkerställa att deras position är lämplig och fånga samma synfält. Varje kamera bör placeras på ungefär 60-80 grader till varandra. Synfältet bör inkludera forceplate i centrum och en längd på landningsbanan tillräckligt för att fånga två steg.
Kalibreringen volymen är placerad inom förutbestämda områden av banan. En enda ram av kalibreringen volym inom banan, från varje kameror fångas. Alla kalibrerade märken längs var och en av polerna är digitaliserade. Först när en tillfredsställande fel i digitalisering sker, kan försöksledaren fortsätta att samla rörelseorganen uppgifter. Denna kalibrering steg är kritisk innan insamling av data. Om kalibreringen inte utförts korrekt, eller om kalibrering inte inträffar omedelbart före en inspelning session kommer alla resulterande data vara felaktig och oanvändbar. Viktigt om någon av kamerorna beröring eller flyttas, är det säkrast att anta att kalibrering av systemet behöver göras om.
Omedelbart före placera djuret i banan, är dess vikt registreras och färdiga konisk reflekterande huden markörer (med hjälp av 3M reflexband, se tabell) följs den förutbestämda kände markeringar som gjorts på bakbenen topografiska landmärken. Inspelning djurets vikt kommer att tillåta retrospektiv normalisering av markstyrkor reaktion på kroppsvikt - en viktig aspekt om man vill göra jämförelser mellan grupper. Dessutom underlättar kroppsvikt mätning övervakning av djurens hälsa under hela experimentet. Marker placering kräver endast lämpliga djurhantering och kräver inte bedövning av djuret. Om limmet på reflexband är otillräcklig för att följa djurets hud, kan en mycket liten mängd giftfritt lim (t.ex. 3M VetBond Tissue Adhesive) användas för att underlätta anslutning av markören på djurets kropp. När markörerna är placerade på bakre extremiteterna, bör försöksledaren placeras bekvämt nära tangentbordet på datorn och har i hand vid markör ansluten genom Vicon Motus-systemet. Med hjälp av kalibrerade filen som en mall, är flera filer som är gjorda före inspelningen. Vanligtvis, 25 till 30 filer måste sparas. Varje fil bör namnges unikt. Varje fil kommer att representera en inspelad drivs av djuret som spelas in. Tjugofem till 30 filer krävs för att säkerställa att tillräckligt antal körningar möte hastigheten införandet kriteriet (dvs 60-90 cm / s) samlas in. Efter tillräckligt många filer skapas försöksledaren kan börja samla in data. I experimenter måste prompt råttan till bollen i banan genom att kasta ¼ bitar av Cheerios i vardera änden av startbanan. Med noggrann samordning och timing, är händelsen markör utlöses vid initiering och strax före slutförandet av råttan att framgångsrikt slutföra en passning längs banan. Efter att ha undersökt den råa kraft marken reaktion spåra, och efter inspelningen om vänster eller höger ben träffade kraft plattan, är filen sparas och stängs. Lika många höger och vänster träffar lem forceplate bör registreras. Processen med registrering av data från en given köra upprepas tills tillräckligt många körningar har registrerats.
6. Data Analysis
Efter avslutad datainsamling för kinematik och marktrupper reaktion, behöver varje körning från varje djur som skall utvärderas för hastighet. Med hjälp av två relativt fasta markörer (t.ex. vingar iliums) kan man värdera en virtuell punkt mellan markörer (göras före när du skapar en Vicon Motus fil mall). Innan beräkning av hastigheten på denna "virtuella" punkt måste markörer för iliaca markörer ska digitaliseras. Använda Vicon motus programvara, hastighet på denna virtuella punkt i X-riktning (horisontell riktning rörlighet) beräknas. På så sätt bara kör inom ett givet intervall hastigheter (bestämd på förhand) används i den slutliga analyserna. Vi finner att djuren rör sig mellan 60-90 cm / s använder konsekvent trav gångarter. Ett minimum av 10 körningar (5 körningar där den vänstra delen kommer i kontakt med den kraft plattformen och 5 kör där rätten lem i kontakt med den kraft plattform) är obligatoriska. När acceptabla går är identifierade för varje djur, måste digitalisering av de återstående huden markörer slutföras.
För att kompensera för huden rörelse artefakt över knäet, skattning av knäet positionen beräknas med hjälp av triangulering (skärningspunkt mellan två cirklar 2D kinematik, eller skärningspunkten mellan två sfärer 3D kinematik), har som tidigare beskrivits. Höft, knä och hasleden vinklar, hastigheter och accelerationer kan nu fastställas. Hållning och svinga tider kan också utvärderas, även om deras exakthet är begränsad baseras på samplingshastighet av kamerorna att vara anställd. Dessa och andra beräkningar kan utföras direkt (dvs utan export) med hjälp av Vicon Motus KineCalc programvara eller data kan exporteras som ASCII-data och analyseras med hjälp av anpassningsbara rutiner i programvara såsom Matlab.
Ground reaktionskraft uppgifter mäts och förstärks av den AMTI kraft plattformen och samlas in på 1200 Hz med Vicon Motus. Som sådan, när marken reaktionskraft data samlas in, ett lämpligt digitalt filter används till data med hjälp Vicon Motus. Med tanke på att försöksledaren redan har bestämt hastigheten på resor och identifierade acceptabel springer efter digitalisering lämpligt hud markörer, mark reaktionskraft data som samlas in samtidigt som den kinematiska data, kan analyseras med hjälp Vicon Motus KineCalc direkt, eller indirekt med hjälp av några andra anpassningsbara program rutin. En mängd olika variabler för styrkor, i de tre ortogonala riktningar, kan beräknas. Sådana variabler är maximala kraft, område und kurvan (dvs impuls), etc. Viktigt är dock måste försöksledaren hålla höger och vänster lem data för varje körning av varje djur åtskilda. Uppgifter som hämtas från höger eller vänster ben är i genomsnitt för varje djur och används som representativa uppgifter för detta djur. Data analyserades med hjälp av lämpliga statistiska metoder.
7. Representativa resultat
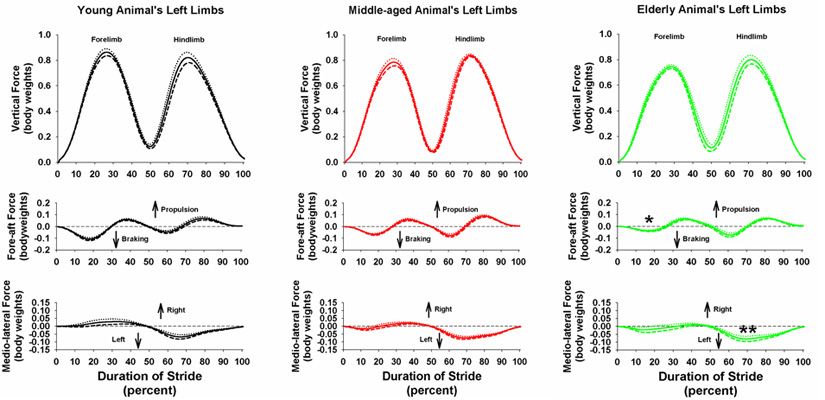
För att representera nyttan av denna form av motorisk analys var kinematik och marktrupper reaktion bestämmas för unga, medelålders och geriatriska kvinnliga Wistar råttor. Från denna analys var åldersrelaterade skillnader för kvinnliga Wistar råttor. Framför allt visar marken reaktionskraft analys som geriatriska råttor har minskat forelimb bromsförmåga och tenderar att använda sina bakben mer för lateral stabilisering jämfört med andra grupper av djur (Figur 1). Kinematisk analys visade inga statistiska skillnader mellan varje grupp, men visar att kinematik lätt kan spelas in från praktiskt taget alla ålder råtta (figur 2).

Figur 1 Ground insatsstyrka spåra tas från vänster ben av unga. (4 månader gammal, n = 7), medelålders (13-14 månader gammal, n = 7) och geriatrisk (24 månader gammal, n = 5) kvinnliga Wistar råttor. Höger ben var likartade. Det är klart framgår att geriatriska råttor använder sina framben mindre för att bromsa (* = p <0,05) jämfört med unga och medelålders råttor och geriatriska råttor tenderar att använda sina bakben mer för lateral stabilisering jämfört med unga råttor (**). Heldragna linjerna representerar medelvärdet, streckade linjerna representerar medelvärde + SE, streckadlinje avser medelvärde SE. Klicka här för att se en större figur.

Figur 2. Kinematisk stick siffror för den vänstra delen av unga, medelålders och geriatriska råttor. Stick siffror representerar medelvärdet rörelse vänster lem för varje grupp. Det fanns inga signifikanta skillnader mellan grupperna av djur för gemensam vinkel under steget cykeln. Klicka här för att se en större figur.
Discussion
Detta dokument innehåller metoder för att bedöma förflyttning med kontinuerlig kvantitativ kinematik och marken reaktionskrafter beslutsamhet. Viktigt för alla som är intresserade att göra en sådan metod är en stark bakgrund inom biomekanik rörelseorganen, djur sensomotoriska beteende och hantering av data och manipulation. Även kinematiska och marken insatsstyrka beslutsamhet kräver ytterligare tid och expertis, jämfört med vissa andra former av motorisk analys (t.ex. endpoint åtgärder, ordningstal skattningsskalor), är de data som erhållits känsliga, objektiva och kvantitativa för olika ortopediska 14-22 och neurologiska 1-3, 23-32 modeller av sjukdom, i en mängd olika arter.
Vi har lämnat uppgifter som beskriver skillnader i rörelseorganen mellan olika åldrarna stam matchade råttor information som inte kunde utläsa med hjälp av enkla och mindre känsliga åtgärder. Vidare har kinematisk och kinetisk analys av förflyttning använts för att beskriva rörelseorganen förändringar i olika nervsystem förhållanden där andra former av utvärdering skulle misslyckas. 8, 23-25, 27 Användningen av känsliga åtgärder är särskilt viktigt vid utvärdering av potentiella therapeutants för olika modeller av sjukdom. Om ett test inte är tillräckligt känslig för att urskilja en effekt av en potentiell therapeutant försöksledaren riskerar att begå ett typ II statistiska fel (dvs att sluta finns det ingen effekt av en behandling när det i själva verket var en effekt). Vidare, eftersom endpoint åtgärder och mer subjektiva tester som utvärderar förflyttning, det finns en risk för bias. Kinematisk och kinetisk utvärdering är helt objektiva i den, förutsatt att lämpliga inkludering / exkludering kriterium görs på förhand, försöksledaren bara samlar in, granskar och tillämpar lämpliga statistik till data (dvs det finns ingen subjektiv komponent till uppgifter beslutsamhet).
Kinematisk och kinetisk analys ger också möjlighet att användas för en mängd arter. I själva verket har kinematik, mark reaktionskraft beslutsamhet, eller båda har använts i en mängd olika arter som elefanter 33-35, kor 36, hästar 37-40, hundar 4, 41-45, 21 katter, 46-49, olika gnagare 3, 8, 50, 51, 4 fåglar, 52-55, och fisk 56, 57 (denna lista är på intet sätt uttömmande). I författarnas erfarenhet är dock användningen av möss problematiskt med tanke på att möss är inte lätt att operantly tillstånd att resa längs en bana. Mot denna bakgrund kommer mössen inte resa på en relativt konstant hastighet och i stället påskynda och långsamt ner när korsa banan. Detta beteende sannolikt kan delvis lösas genom att köra möss på ett löpband och video-tejpning djuret locomoting på löpbandet. 58 Om experimentella apparater för marken insatsstyrka fastslående ändras för löpband användning, marken reaktionskraft beslutsamhet skulle sannolikt bara lätt erhållas för vertikal marken insatsstyrka som löpbandet skulle störa bilens längdriktning och medio-laterala kraft beslutsamhet.
Sammantaget är kinematisk och kinetisk analys av förflyttning en tillförlitlig, känslig och objektiv metod som kan användas för olika modeller av ortopediska och neurologiska förhållanden. Dessutom har all utrustning blir tillgängliga för användning hos gnagare, vilket motverkar eventuella skäl för att inte utföra denna form av sensomotoriska beteendeanalys.
Disclosures
Inga intressekonflikter deklareras.
Acknowledgments
Denna forskning stöds av ett Discovery Grant att AAW från naturvetenskaplig och teknisk forskning Council of Canada.
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J.
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M.
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R.
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}