

Summary
हरकत अक्सर तंत्रिका विज्ञान और orthopedics जैसे क्षेत्रों में रोग के विभिन्न मॉडलों में व्यवहार परिणाम के रूप में जांच की है. यह वीडियो कागज चूहों से अनर्गल हरकत के दौरान जमीन प्रतिक्रिया बलों और कीनेमेटीक्स इकट्ठा करने के लिए एक विधि का वर्णन करने का इरादा है.
Abstract
व्यवहार, अपनी व्यापक परिभाषा में, में शारीरिक प्रक्रियाओं की मोटर अभिव्यक्ति के रूप में परिभाषित किया जा सकता है. जैसे, सभी व्यवहार मोटर प्रणाली के माध्यम से प्रकट. तंत्रिका विज्ञान और orthopedics के क्षेत्र में, हरकत रोग मॉडल की एक किस्म के लिए एक सामान्य व्यवहार का मूल्यांकन है. उदाहरण के लिए, तंत्रिका तंत्र के लिए अभिघातजन्य चोट के बाद हरकत वसूली सबसे अधिक मूल्यांकन 1-3 व्यवहार है. हालांकि हरकत endpoint के माप की एक किस्म (उदाहरण के लिए एक हरकत का कार्य, आदि को पूरा समय लिया), semiquantitative कीनेमेटीक्स उपाय (उदाहरण के क्रमसूचक दर्ज़ा तराजू (जैसे Basso Beattie और Bresnahan (BBB) हरकत रेटिंग स्केल, आदि)) और किराए का उपयोग मूल्यांकन किया जा सकता है व्यवहार के उपायों (जैसे मांसपेशी बल, तंत्रिका प्रवाहकत्त्व वेग, आदि), केवल (बल माप) कैनेटीक्स और कीनेमेटीक्स (शरीर खंडों के अंतरिक्ष में माप) रणनीति है जिसके द्वारा एक जानवर एक locomote करने में सक्षम है की एक विस्तृत वर्णन प्रदान करते हैं . हालांकि locomoting कृन्तकों नहीं माप अब नया, कीनेमेटीक्स और गतिज अधिक व्यावसायिक रूप से उपलब्ध इस प्रयोजन के लिए डिजाइन उपकरणों की उपलब्धता के कारण सुलभ आसानी से. महत्वपूर्ण बात है, तथापि, experimenters biomechanical विश्लेषण के सिद्धांत के साथ बहुत परिचित होना चाहिए और विश्लेषण के इन रूपों के लाभ और सीमाएं क्या एक अपेक्षाकृत श्रम गहन अध्ययन हो जाएगा पर embarking से पहले समझने की जरूरत है. वर्तमान कागज कीनेमेटीक्स और जमीन प्रतिक्रिया बल व्यावसायिक रूप से उपलब्ध उपकरण का उपयोग डेटा का संग्रह करने के लिए एक विधि का वर्णन करना. उपकरण और उपकरण सेट अप के विवरण, जानवर, शामिल किए जाने और अपवर्जन मानदंड स्वीकार्य रन की, और डेटा इकट्ठा करने के लिए तरीकों के पूर्व प्रशिक्षण में वर्णित हैं. हम तनाव मिलान युवा वयस्क, मध्यम आयु वर्ग के, और बुढ़ापे की चूहों की कीनेमेटीक्स और कैनेटीक्स का वर्णन करके इस व्यवहार विश्लेषण तकनीक की उपयोगिता का वर्णन.
Protocol
1. Biomechanical हरकत विश्लेषण के लिए पूर्व आवश्यक वस्तुएँ
पहले महंगा हरकत का विश्लेषण उपकरण खरीदने पर तैयार है, और प्रयोगों जहाँ कीनेमेटीक्स और / या गतिज हरकत का मूल्यांकन किया जाएगा की योजना बना करने के लिए, यह जरूरी है कि experimenter biomechanical विश्लेषण की तकनीकी और व्यावहारिक पहलुओं से परिचित हो, ज्ञानेन्द्रिय व्यवहार, पशुओं के operant कंडीशनिंग और हैंडलिंग / भंडारण / डिजीटल डेटा की बड़ी मात्रा के प्रबंध. हालांकि इन पूर्वापेक्षाएं कई लोगों के लिए स्पष्ट लगता है, यह बाद ही प्रयोगों जहां प्रशिक्षुओं अपेक्षाकृत विस्तृत हरकत का विश्लेषण प्रदर्शन के तकनीकी और व्यावहारिक जटिलताओं का एहसास के इन प्रकार पर embarking है. लेखक अनुशंसा करते हैं कि experimenters एक परिचयात्मक biomechanics के साथ निपटने पाठ्यक्रम में दाखिला लिया, से परिचित हो सकता है या डेटा प्रबंधन के लिए आवश्यक एक प्रोग्रामिंग भाषा के साथ परिचित किसी को किराए पर, और बराबर महत्व के लिए पर्याप्त समय बातचीत, हैंडलिंग, और प्रयोगशाला पशुओं के साथ काम खर्च. हरकत और न्यूरो में ज्ञानेन्द्रिय व्यवहार विश्लेषण विश्लेषण को समझने के लिए, प्रयोगकर्ताओं के कई महत्वपूर्ण संदर्भ के लिए भेजा जाता है (1 देखें , 4-7).
2. विज्ञान सम्बन्धी और काइनेटिक परीक्षण उपकरण
एक कीनेमेटीक्स और गतिज परीक्षण उपकरण, द्विपक्षीय डेटा संग्रह के लिए उपयोगी है, निम्नलिखित घटकों (और अधिक विस्तार के लिए 'विशिष्ट अभिकर्मकों और उपकरण की तालिका "देखें) के शामिल है:
- चुप और पर्याप्त आकार के कमरे (जरूरी नहीं कि ध्वनि-proofed है, हालांकि एक कम यातायात के क्षेत्र में स्थित)
- पृष्ठभूमि "शोर" की आपूर्ति के लिए कमरे के बाहर से ध्यान भंग शोर पशुओं को सीमा रेडियो
- साफ है, एक वर्ग छेद (11 सेमी x 11 सेमी) के साथ संलग्न, रनवे फ्लैट सतह plexiglass (180 सेमी उच्च लंबे एक्स 20 सेमी चौड़ा एक्स 60 सेमी) के दोनों छोर से समदूरस्थ रनवे के केंद्र के भीतर स्थित
- Plexi (10.5 सेमी x 10.5 सेमी) कांच का टुकड़ा
- डबल पक्षीय चिपकने वाला स्कॉच टेप
- 3M चिंतनशील त्वचा मार्करों के लिए चिपकने वाला टेप
- त्वचा मार्करों बनाने के लिए होल पंच
- Isofluorane संज्ञाहरण मशीन त्वचा मार्करों की नियुक्ति से पहले शेविंग के लिए anesthetizing जानवरों के लिए आवश्यक
- रनवे की लंबाई के साथ पशुओं के उत्साहजनक आंदोलन के लिए Cheerios
- AMTI HE6X6 forceplate
- Vicon Motus अनुकूलित प्रणाली (सॉफ्टवेयर, कंप्यूटर, आदि)
- 4 वीडियो (कम से कम 60 हर्ट्ज नमूने) कैमरों और उचित संबंधक केबल के साथ tripods
- 4 कैमरा घुड़सवार हलोजन रोशनी जानवर विषय की रोशनी और चिंतनशील त्वचा मार्करों के लिए इष्टतम प्रकाश व्यवस्था प्रदान करता है
- उपयुक्त आकार अंशांकन फ्रेम या Vicon Motus प्रणाली के लिए आवश्यक मात्रा सार्थक दूरी उपायों में एक्स, वाई, z पदों जांचना
3. पशु प्रशिक्षण
डेटा संग्रह से पहले, प्रत्येक जानवर के लिए एक फ्लैट सतह, संलग्न रनवे को पार करने के लिए प्रशिक्षित किया जाना चाहिए. एक उपयुक्त पशु आपूर्तिकर्ता से चूहों को प्राप्त करने पर, पशुओं के लिए 1 सप्ताह के लिए अपने नए घर को आदत होना चाहिए. इस acclimation समय के दौरान, कई Cheerios दैनिक चूहा पिंजरे में रखा जाता है. पशु उनके रखरखाव ऊर्जा आवश्यकताओं को प्रतिबंधित भोजन मोटापा रोकने के लिए और इस कार्य को करने की प्रेरणा सुनिश्चित कर रहे हैं. इसके बाद, प्रत्येक जानवर 10-15 मिनट के लिए 1 सप्ताह के लिए दैनिक experimenter द्वारा नियंत्रित किया जाता है. इस एक ही समय अवधि के दौरान, प्रत्येक जानवर Cheerios के साथ रनवे के दोनों छोर पर स्थित में रखा गया है. एक बार जानवर को अपने वातावरण के साथ परिचित हो जाता है, वे Cheerios खा शुरू हो जाएगा. एक बार जानवरों की सहज और रनवे के भीतर खाने Cheerios है, experimenter तो operantly एक खाद्य पुरस्कार के लिए रनवे की लंबाई को चलाने के लिए जानवर की हालत चाहिए. इस रनवे जहां चूहे तैनात है के विपरीत अंत ¼ बंदगी पोट द्वारा पूरा किया है. एक बार चूहा इस बंदगी खाता है, एक और ¼ बंदगी रनवे के दूसरे छोर पर रखा गया है. यह एक निरंतर वेग में लगातार चूहे रनवे (tosses के 90%) के साथ चलता है जब तक 15-20 दैनिक मिनट के लिए किया जाता है (यानी बिना शुरू, रोक, खोज, या चाल बदलने के बिना) दौड़नेवाला / bounding बिना बंदगी खाने . चूहे केवल एक trotting चाल रोजगार जाना चाहिए. इस कार्य के लिए पशुओं के ओवर कंडीशनिंग पशुओं को ले जल्दी से चलनेवाला और bounding इन gaits> 90 सेमी एस / यात्रा पशुओं के संकेत हैं कर सकते हैं Bounding और gaits जल्दी से चलनेवाला, biomechanically, और अधिक कठिन कारणों (जैसे पैर नेतृत्व शामिल किए जाने के मानदंड, आदि) की एक किस्म के लिए व्याख्या कर रहे हैं. हमारे अनुभव में, एक बार चूहों लगातार जल्दी से चलनेवाला या bounding gaits रोजगार, यह मुश्किल है, अगर नहीं नामुमकिन है उन्हें एक trotting चाल का उपयोग करते हुए रनवे में locomoting. वेग> 90 सेमी / एस शायद ही कभी देखा जाता है के बाद एक जानवर परिधीय या केंद्रीय तंत्रिका तंत्र की चोट से पीड़ित है. सफल प्रशिक्षण तक पहुँचने का समय है VARIAउपभेदों और चूहों के लिंगों के बीच ble. Wistar, लुईस, लांग इवांस, और Sprague-Dawley उपभेदों करने के लिए 2 सप्ताह के भीतर लगातार 8 प्रशिक्षण के शुरू होने से रनवे पार कर रहे हैं. हमारे अनुभव में, फिशर चूहों (एफ 344) इस 8 कार्य जानने के लिए 4-6 सप्ताह के ऊपर लेने के लिए करते हैं.
4. संयुक्त चिह्नित स्थिति
Forelimb कीनेमेटीक्स विश्लेषण त्वचा आंदोलन forelimbs जो प्रजातियों में exacerbated है चूहों की तरह, कि एक crouched 9 आसन है पर त्वचा मार्करों रखकर लगाया artifact के कारण अविश्वसनीय है. इसके बजाय, forelimbs के कीनेमेटीक्स एक्सरे छायांकन या 10-13 प्रतिदीप्तिदर्शन का प्रयोग कर प्राप्त किया जाना चाहिए. जैसे, पिछले अंग संयुक्त स्थिति मार्कर प्लेसमेंट केवल इस के साथ साथ वर्णित है.
डेटा संग्रह से पहले, प्रत्येक चूहे anesthetized डेटा संग्रह के अग्रिम में कम से कम 24 घंटे एक उपयुक्त inhalational (isofluorane जैसे, 1.5-2% एक सटीक vaporizor पर डायल) संवेदनाहारी और चेहरे नकाब के माध्यम से ऑक्सीजन में प्रशासित, और चाबी स्थलाकृतिक शारीरिक का उपयोग करना चाहिए स्थलों के रूप में चिह्नित किया जाना चाहिए. प्रक्रिया की संक्षिप्तता को देखते हुए, और क्योंकि लंबे समय से अभिनय संवेदनाहारी एजेंट नहीं उपयोग किया जाता है, जानवर के शरीर का तापमान बनाए रखने के लिए इस्तेमाल किया एक जानवर वार्मिंग डिवाइस के उपयोग की जरूरत नहीं है. एक बार जानवरों की anesthetized है, हिंद अंग और श्रोणिफलक crests के स्तर पर dorsum, मुंडा हैं. जानवर तो sternal लेटना में रखा है और अपने hindlimbs एक अनुमानित खड़े फर्म पैकिंग फोम का उपयोग कर इसे समर्थन करने की स्थिति में रखा जाता है. श्रोणिफलक crests के सबसे कपाल भाग overlying त्वचा, जांध की हड्डी, पार्श्व tibial tuberosity, tarsal संयुक्त, और 5 वीं metatarsal के बाहर का है और पार्श्व पहलू के अधिक से अधिक trochanter एक गैर विषैले स्थायी मार्कर के साथ चिह्नित है. जानवर संज्ञाहरण से बरामद किया है. लौकिक अध्ययन के लिए, आवधिक संज्ञाहरण hindlimbs जिससे की अनुमति बाद चिंतनशील मार्कर प्लेसमेंट (नीचे देखें) दाढ़ी के लिए आवश्यक हो सकता है. इसके अलावा, पहले से चिह्नित संरचनात्मक स्थलों (एक ही मार्कर गैर विषैले का उपयोग करके) के दैनिक हाइलाइटिंग के रूप में आवश्यक हो चूहों धीरे प्राकृतिक सौंदर्य व्यवहार के माध्यम से मार्करों हटा देगा.
5. डेटा रिकॉर्डिंग
सभी कैमरा दृश्य के लिए सुनिश्चित करें कि अपनी स्थिति उपयुक्त है और देखने का एक ही क्षेत्र पर कब्जा है की जांच कर रहे हैं. प्रत्येक कैमरा एक दूसरे से लगभग 60-80 डिग्री पर रखा जाना चाहिए. देखने के क्षेत्र के केंद्र में forceplate और रनवे की लंबाई दो प्रगति पर कब्जा करने के लिए पर्याप्त शामिल करना चाहिए.
अंशांकन मात्रा पूर्व निर्धारित रनवे के क्षेत्र के भीतर रखा जाता है. रनवे के भीतर अंशांकन की मात्रा के एक एकल फ्रेम, कैमरों के प्रत्येक से कब्जा कर लिया है. सभी डंडे का प्रत्येक की लंबाई के साथ कैलिब्रेटेड निशान डिजीटल हैं. केवल एक बार अंकीयकरण में एक संतोषजनक त्रुटि पूरा हरकत डेटा एकत्रित करने के लिए आगे बढ़ना experimenter सकता है. यह अंशांकन डेटा संग्रह से पहले महत्वपूर्ण कदम है. यदि अंशांकन सही नहीं किया जाता है, या अगर अंशांकन तुरंत एक रिकॉर्डिंग सत्र से पहले नहीं होती है, सभी परिणामी डेटा गलत और व्यर्थ हो जाएगा. महत्वपूर्ण बात है, अगर कैमरों के किसी भी छुआ कर रहे हैं या ले जाया गया, यह सुरक्षित है लगता है कि इस प्रणाली के अंशांकन के लिए दोहराया जा जरूरत है.
तुरंत पहले रनवे में पशु रखने के लिए, अपने वजन दर्ज की है और पूर्व बनाया शंक्वाकार चिंतनशील त्वचा मार्करों (3M चिंतनशील टेप का उपयोग कर तालिका देखें) पूर्व निर्धारित लगा हिंद अंग स्थलाकृतिक स्थलों पर बने निशान को पालन कर रहे हैं. जानवर का वजन रिकॉर्डिंग जमीन प्रतिक्रिया बलों के पूर्वव्यापी शरीर के वजन के लिए सामान्य अनुमति होगी - एक महत्वपूर्ण पहलू है अगर एक इच्छाओं समूहों के बीच तुलना करने के लिए. इसके अतिरिक्त, शरीर के वजन माप के प्रयोग की अवधि के लिए पशु के समग्र स्वास्थ्य की निगरानी की सुविधा. मार्कर प्लेसमेंट केवल उपयुक्त जानवर से निपटने की आवश्यकता है और जानवर के संज्ञाहरण की आवश्यकता नहीं है. अगर चिंतनशील टेप पर चिपकने वाला पशुओं की त्वचा का पालन करने के लिए अपर्याप्त है, गैर विषैले गोंद की एक बहुत छोटी राशि (जैसे 3M VetBond ऊतक चिपकने वाला) जानवर के शरीर पर मार्कर के पालन की सुविधा के लिए इस्तेमाल किया जा सकता है. Experimenter एक बार मार्करों hindlimbs पर रखा जाता है, कंप्यूटर के कीबोर्ड के पास आराम से तैनात करना चाहिए और हाथ में घटना Vicon Motus प्रणाली के माध्यम से संलग्न मार्कर है. एक टेम्पलेट के रूप में कैलिब्रेटेड फ़ाइल का उपयोग, कई फाइलें रिकॉर्डिंग के अग्रिम में बना रहे हैं. आमतौर पर, 25 से 30 फाइलें बचाया जा जरूरत है. प्रत्येक फ़ाइल विशिष्ट नाम होना चाहिए. प्रत्येक फ़ाइल का प्रतिनिधित्व करेंगे दर्ज किया जा रहा है जानवर की दर्ज की. 30 फाइलें पच्चीस करने के लिए सुनिश्चित करें कि पर्याप्त संख्या में शामिल किए जाने कसौटी वेग (यानी 60-90 सेमी / s) की बैठक रन की एकत्र कर रहे हैं आवश्यक हैं. फ़ाइलों के लिए पर्याप्त संख्या के बाद पैदा कर रहे हैं experimenter डेटा इकट्ठा करने शुरू कर सकते हैं. ईxperimenter रनवे भीतर रनवे के दोनों छोर पर Cheerios की ¼ टुकड़े फेंकने से चूहे शटल करने के लिए संकेत चाहिए. सावधान समन्वय और समय के साथ, घटना मार्कर दीक्षा में शुरू हो रहा है और सिर्फ सफलतापूर्वक रनवे साथ एक पास पूरा चूहे के पूरा करने के लिए पहले. कच्चे भूमि प्रतिक्रिया बल अनुरेखण की जांच करने के बाद, और रिकॉर्डिंग है कि बाईं या सही अंग बल थाली हिट के बाद, फ़ाइल को बचाया है और बंद कर दिया. छोड़ दिया और सही अंग forceplate हिट के समान संख्या दर्ज होना चाहिए. एक दिया रन से डेटा रिकॉर्डिंग की प्रक्रिया जब तक रन की पर्याप्त संख्या दर्ज किया गया है दोहराया है.
6. डेटा विश्लेषण
कीनेमेटीक्स और जमीन प्रतिक्रिया बलों के लिए डेटा संग्रह को पूरा करने पर, हर जानवर से प्रत्येक रन गति के लिए मूल्यांकन किया जाना चाहिए. दो अपेक्षाकृत स्थिर मार्करों (iliums के जैसे पंख) का प्रयोग एक मार्कर (पहले किया जब एक Vicon Motus फ़ाइल टेम्पलेट बनाने) के बीच एक आभासी बिंदु का मूल्यांकन कर सकते हैं. इस "आभासी" बिंदु की गति की गणना करने से पहले, श्रोणिफलक मार्करों के लिए मार्करों डिजीटल होना चाहिए. Vicon motus सॉफ्टवेयर, एक्स दिशा (आंदोलन की क्षैतिज दिशा) में इस आभासी बिंदु के वेग का उपयोग गणना की है. ऐसा करने में, केवल एक दिया रेंज गति के भीतर चलाता है (एक प्राथमिकताओं निर्धारित) अंतिम विश्लेषण में उपयोग किया जाता है. हम पाते हैं कि 60-90 सेमी / एस के बीच जाने से पशुओं के अनुरूप अक्सर यात्रा gaits का उपयोग कर रहे हैं. 10 रन (5 रन जहां बाएँ अंग बल मंच के साथ संपर्क में आता है और 5 रन जहां सही अंग बल मंच के साथ संपर्क में आता है) की एक न्यूनतम आवश्यक हैं. एक बार स्वीकार्य रन प्रत्येक जानवर के लिए पहचाने जाते हैं, शेष त्वचा मार्करों के डिजिटलीकरण पूरा किया जाना चाहिए.
त्वचा घुटने पर आंदोलन artifact के लिए क्षतिपूर्ति करने के लिए, घुटने की स्थिति का आकलन triangulation (दो 2D कीनेमेटीक्स हलकों के बीच चौराहे, या 2 कीनेमेटीक्स 3 डी क्षेत्रों के बीच प्रतिच्छेदन) का उपयोग कर की गणना की जाती है, जैसा कि पहले वर्णित किया गया है. हिप, घुटने, और ओल संयुक्त कोण, वेग, और accelerations अब निर्धारित किया जा सकता है. रुख और झूले बार भी मूल्यांकन किया जा सकता है, हालांकि उनकी सटीकता जा रहा कार्यरत कैमरों के नमूने गति पर आधारित सीमित है. इन और अन्य गणना सीधे किया जा सकता है (यानी निर्यात के बिना) Vicon Motus KineCalc सॉफ्टवेयर, या डेटा ASCII डेटा के रूप में निर्यात किया जा सकता है और MatLab जैसे सॉफ्टवेयर में अनुकूलन दिनचर्या का उपयोग का विश्लेषण का उपयोग.
ग्राउंड प्रतिक्रिया बल डेटा और मापा प्रवर्धित AMTI बल मंच द्वारा Vicon Motus द्वारा 1200 हर्ट्ज पर एकत्र. जैसे, एक बार जमीन प्रतिक्रिया बल डेटा एकत्र, एक उचित डिजिटल फिल्टर Vicon Motus का उपयोग कर डेटा के लिए लागू किया जाता है. यह देखते हुए कि experimenter पहले से ही अंकीयकरण के बाद उचित त्वचा मार्करों, भूमि प्रतिक्रिया बल डेटा है कि एक साथ कीनेमेटीक्स डेटा के रूप में एकत्र किया गया था, Vicon Motus KineCalc सीधे परोक्ष रूप से या कुछ अन्य अनुकूलन सॉफ्टवेयर का उपयोग कर का उपयोग करते हुए विश्लेषण किया जा सकता है यात्रा और पहचान स्वीकार्य रन की गति निर्धारित दिनचर्या. बलों के लिए चर की एक किस्म, तीन orthogonal दिशाओं में से प्रत्येक में गणना की जा सकती है. ऐसे चर चोटी बल, क्षेत्र und वक्र (यानी आवेग), आदि महत्वपूर्ण बात है, तथापि, experimenter प्रत्येक अलग जानवर के प्रत्येक रन के लिए सही और बाएँ अंग डेटा रखना चाहिए. डेटा को दाएँ या बाएँ अंग से निकाले प्रत्येक जानवर के लिए औसत है और उस जानवर के लिए प्रतिनिधि डेटा के रूप में इस्तेमाल किया. डेटा तो उपयुक्त सांख्यिकीय प्रक्रियाओं का उपयोग करते हुए विश्लेषण किया है.
7. प्रतिनिधि परिणाम
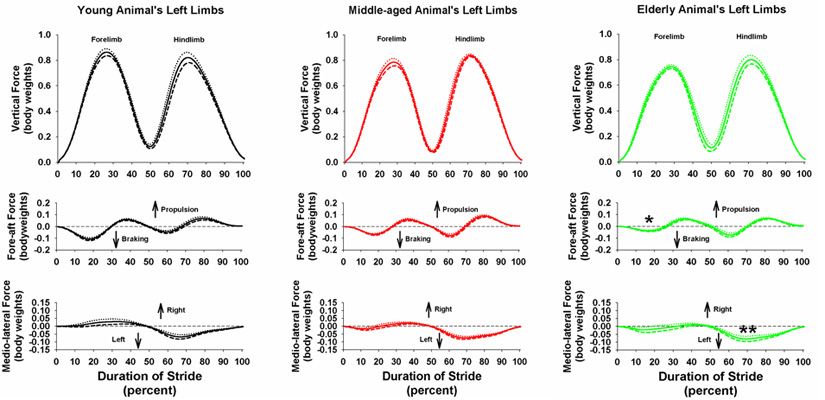
हरकत का विश्लेषण के लिए इस प्रपत्र की उपयोगिता का प्रतिनिधित्व करने के लिए, कीनेमेटीक्स और जमीन प्रतिक्रिया बलों के जवान, मध्यम आयु वर्ग के, और बुढ़ापे की महिला Wistar चूहों के लिए निर्धारित किया गया है. इस विश्लेषण से, उम्र से संबंधित मतभेद महिला Wistar चूहों के लिए पाए गए. विशेष रूप से, भूमि प्रतिक्रिया बल विश्लेषण दर्शाता है कि बुढ़ापे चूहों forelimb ब्रेक लगाना क्षमता कम है और पार्श्व स्थिरीकरण के लिए अपने hindlimbs जानवरों (चित्रा 1) के अन्य समूहों की तुलना में अधिक उपयोग करते हैं. विज्ञान सम्बन्धी विश्लेषण प्रत्येक समूह के बीच किसी सांख्यिकीय मतभेद प्रकट नहीं किया था, हालांकि दर्शाता है कि कीनेमेटीक्स आसानी से चूहे के लगभग किसी भी उम्र (चित्रा 2) से दर्ज किया जा सकता.

(7, पता = 4 महीने पुरानी), मध्यम आयु वर्ग (13-14 महीने पुराने, n = 7), और बुढ़ापे (24 महीने पुराने, n = 5) 1 ग्राउंड प्रतिक्रिया बल युवा के बाईं अंग से लिया अनुरेखण चित्रा महिला Wistar चूहों. राइट अंग समान थे. यह तत्काल स्पष्ट है कि बुढ़ापे चूहों उनके forelimbs कम ब्रेक लगाना (* = पी <0.05) के लिए युवा और मध्यम आयु वर्ग के चूहों की तुलना में उपयोग करते हैं, और बुढ़ापे चूहों युवा चूहों की तुलना में पार्श्व स्थिरीकरण के लिए उनके hindlimbs अधिक उपयोग करते हैं (**). ठोस लाइनों का प्रतिनिधित्व करते हैं मतलब है, बिंदीदार लाइनों मतलब + एसई का प्रतिनिधित्व करते हैं; धराशायीलाइनों एसई मतलब का प्रतिनिधित्व करते हैं. कृपया यहाँ क्लिक करने के लिए एक बड़ा आंकड़ा देखें.

चित्रा 2. जवान, मध्यम आयु वर्ग के, और बुढ़ापे की चूहों की बाईं अंग के लिए विज्ञान सम्बन्धी छड़ी के आंकड़े . छड़ी के आंकड़े को समूहों में से प्रत्येक के लिए बाएँ अंग का मतलब आंदोलन का प्रतिनिधित्व करते हैं. संयुक्त कोण के लिए कोई कदम चक्र के दौरान पशुओं के समूहों के बीच महत्वपूर्ण मतभेद थे. कृपया यहाँ क्लिक करने के लिए एक बड़ा आंकड़ा देखें.
Discussion
वर्तमान कागज निरंतर मात्रात्मक कीनेमेटीक्स और भूमि प्रतिक्रिया बल दृढ़ संकल्प का उपयोग हरकत का मूल्यांकन करने के लिए पद्धति प्रदान करता है. इस पद्धति पर तैयार करने में रुचि किसी के लिए महत्वपूर्ण हरकत के biomechanics, पशु ज्ञानेन्द्रिय व्यवहार, और डेटा प्रबंधन और हेरफेर में एक मजबूत पृष्ठभूमि है. हालांकि कीनेमेटीक्स और भूमि प्रतिक्रिया बल दृढ़ संकल्प अतिरिक्त समय और विशेषज्ञता की आवश्यकता हरकत का विश्लेषण (उदाहरण के endpoint के उपायों, क्रमसूचक दर्ज़ा तराजू) के कुछ अन्य रूपों की तुलना में, डेटा प्राप्त 14-22 आर्थोपेडिक और neurologic की एक किस्म के लिए संवेदनशील, उद्देश्य, और मात्रात्मक है 1-3, 23-32 रोग की प्रजाति की एक किस्म में, मॉडल.
हम डेटा है कि हरकत में तनाव मिलान चूहों जानकारी है कि नहीं gleaned जा सकता है सरल और कम संवेदनशील उपायों का उपयोग कर के विभिन्न उम्र के बीच अंतर का वर्णन प्रदान की है. इसके अलावा, हरकत की कीनेमेटीक्स और गतिज विश्लेषण तंत्रिका तंत्र की स्थिति है जहां मूल्यांकन के अन्य रूपों असफल होगा की एक किस्म में हरकत परिवर्तन का वर्णन किया गया इस्तेमाल किया गया है 8, 23-25, 27 संवेदनशील उपायों का उपयोग विशेष रूप से महत्वपूर्ण हो जाता है जब संभावित therapeutants का मूल्यांकन. रोग के विभिन्न मॉडलों के लिए. यदि एक परीक्षण के लिए एक संभावित therapeutant experimenter एक प्रकार द्वितीय सांख्यिकीय त्रुटि करने के जोखिम को चलाता है एक प्रभाव के विचार काफी संवेदनशील नहीं है (यानी समापन वहाँ एक इलाज का कोई प्रभाव नहीं है जब वास्तव में वहाँ एक प्रभाव था). इसके अलावा, क्योंकि endpoint के उपाय और अधिक व्यक्तिपरक परीक्षण है कि हरकत मूल्यांकन, वहाँ के लिए एक संभावित पूर्वाग्रह मौजूद है. कीनेमेटीक्स और गतिज मूल्यांकन विशुद्ध रूप से उस में उद्देश्य है प्रदान उपयुक्त कसौटी / अपवर्जन शामिल किए जाने के एक प्राथमिकताओं बना रहे हैं, experimenter बस एकत्र, जाँच, और डेटा (यानी डेटा निर्धारण करने के लिए कोई व्यक्तिपरक घटक है) के लिए उपयुक्त आँकड़े लागू होता है.
कीनेमेटीक्स और गतिज विश्लेषण भी प्रजातियों में से एक भीड़ के लिए इस्तेमाल किया जा क्षमता देता है. वास्तव में, कीनेमेटीक्स, भूमि प्रतिक्रिया बल दृढ़ संकल्प, या दोनों जैसे 33-35 हाथियों, मवेशियों 36, 37-40 घोड़े, 4 कुत्तों, 41-45, बिल्लियों 21, 46-49, विभिन्न प्रजातियों की एक किस्म में इस्तेमाल किया गया है कृन्तकों 3, 8, 50, 51, 4 पक्षियों, 52-55 और 56 मछली, 57 (इस सूची में कोई संपूर्ण तरह से है). 'लेखक के अनुभव में, तथापि, चूहों का उपयोग दिया है कि चूहों operantly के लिए एक रनवे के साथ यात्रा की हालत के लिए आसान नहीं कर रहे हैं समस्याग्रस्त है. यह देखते हुए, चूहों एक अपेक्षाकृत स्थिर गति से यात्रा नहीं है और बजाय गति - अप और धीमी गति से नीचे जब रनवे traversing. यह व्यवहार की संभावना, भाग में, एक ट्रेडमिल और 58 वीडियो ट्रेडमिल पर पशु locomoting टेप. पर चूहों चलाकर दूर कर सकते हैं यदि भूमि प्रतिक्रिया बल निर्धारण के लिए प्रयोगात्मक तंत्र ट्रेडमिल उपयोग के लिए संशोधित किया जा रहा था, जमीन प्रतिक्रिया बल दृढ़ संकल्प संभावना केवल ऊर्ध्वाधर भूमि प्रतिक्रिया बल के लिए आसानी से प्राप्त किया जा ट्रेडमिल बेल्ट के रूप में सामने पिछाड़ी और medio पार्श्व बल दृढ़ संकल्प के साथ हस्तक्षेप करेगा.
कुल मिलाकर, हरकत की कीनेमेटीक्स और गतिज विश्लेषण एक विश्वसनीय, संवेदनशील है, और उद्देश्य तरीका है कि आर्थोपेडिक और neurologic शर्तों के विभिन्न मॉडलों के लिए नियोजित किया जा सकता है. इसके अलावा, उपकरणों के सभी कृन्तकों में इस्तेमाल के लिए उपलब्ध बन गया है, इस प्रकार ज्ञानेन्द्रिय व्यवहार के विश्लेषण के लिए इस प्रपत्र का प्रदर्शन नहीं करने के लिए किसी भी संबंधित कारण negating.
Disclosures
ब्याज की कोई संघर्ष की घोषणा की.
Acknowledgments
इस शोध डिस्कवरी अनुदान द्वारा समर्थित किया गया था कनाडा के प्राकृतिक विज्ञान और इंजीनियरिंग अनुसंधान परिषद से AAW.
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J. Biomechanics of locomotion in Asian elephants. J. Exp. Biol. 213, 694-706 (2010).
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M. Trunk deformation in the trotting horse. Equine Vet. J. 41, 203-206 (2009).
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R. Penguin waddling is not wasteful. Nature. 408, 929-929 (2000).
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}