

Summary
Locomotion est souvent étudié comme un résultat de comportement dans les différents modèles de la maladie dans des domaines tels que la neuroscience et l'orthopédie. Ce document vidéo se propose de décrire une méthode de collecte des forces de réaction du sol et la cinématique des rats durant la locomotion effrénée.
Abstract
Comportement, dans sa définition la plus large, peut être définie comme la manifestation du moteur de processus physiologiques. En tant que tel, tous les comportements se manifester à travers le système moteur. Dans les domaines des neurosciences et de l'orthopédie, la locomotion est un comportement généralement évalué pour une variété de modèles de maladie. Par exemple, la récupération locomotrice après traumatisme du système nerveux est l'un des comportements les plus couramment évalués 1-3. Bien que la locomotion peut être évaluée en utilisant une variété de mesures de critère (ex.: temps nécessaire pour achever une tâche de locomotion, etc), semi-quantitative des mesures cinématiques (par exemple, des échelles de notation ordinale (par exemple, Basso Beattie et locomotrices Bresnahan (BBB) échelle de notation, etc)) et de substitution mesures du comportement (par exemple la force musculaire, la vitesse de conduction nerveuse, etc), seulement cinétiques (mesures de force) et de la cinématique (mesures de segments du corps dans l'espace) fournir une description détaillée de la stratégie par laquelle un animal est capable de locomote 1. Bien que n'étant pas de nouvelles mesures, cinématique et cinétique de rongeurs locomoting est désormais plus facilement accessibles en raison de la disponibilité des équipements disponibles dans le commerce conçu à cet effet. Fait important, cependant, les expérimentateurs ont besoin d'être très familier avec la théorie d'analyses biomécaniques et comprendre les avantages et les limites de ces formes d'analyse avant de s'engager dans ce qui deviendra une étude relativement main-d'œuvre. Le présent document vise à décrire une méthode de collecte de données cinématiques et au sol une force de réaction en utilisant l'équipement disponible dans le commerce. Détails des équipements et des appareils de set-up, de pré-dressage d'animaux, d'inclusion et d'exclusion de pistes acceptables, et les méthodes de collecte des données sont décrits. Nous illustrons l'utilité de cette technique d'analyse comportementale en décrivant la cinématique et la cinétique de déformation appariés jeune adulte, d'âge moyen, et les rats âgés.
Protocol
1. Pré-requis pour les analyses biomécaniques Locomotion
Avant de se lancer dans l'achat de coûteux équipements d'analyse de locomotion, et la planification des expériences où la cinématique et / ou l'évaluation de locomotion cinétiques seront réalisées, il est impératif que l'expérimentateur se familiariser avec les aspects techniques et pratiques d'analyses biomécaniques, le comportement sensori-moteur, conditionnement opérant des animaux , et de manutention / stockage / gestion de grandes quantités de données numérisées. Bien que ces pré-requis sembler évident pour beaucoup, c'est seulement après l'embarquement sur ces types d'expériences où les stagiaires réalisent la complexité technique et pratique d'effectuer l'analyse de locomotion relativement détaillées. Les auteurs recommandent que les expérimentateurs s'inscrire à un cours traitant de la biomécanique d'introduction, se familiariser avec ou embaucher quelqu'un de familier avec un langage de programmation nécessaires pour la gestion des données, et d'égale importance, passent beaucoup de temps d'interagir, de manutention et de travailler avec des animaux de laboratoire. Pour comprendre l'analyse de locomotion et sensori analyse comportementale dans les neurosciences, les expérimentateurs sont mentionnés à plusieurs références importantes (voir 1, 4-7).
2. Appareil d'essai cinématique et cinétique
Un appareil d'essai cinématiques et cinétiques, utile pour la collecte des données bilatérales, est composé des éléments suivants (voir «Tableau des réactifs et équipements spécifiques" pour plus de détails):
- Chambre calme et suffisamment entreprises (pas nécessairement insonorisées, bien situé dans la région un trafic faible)
- Radio de fournir «bruit de fond» pour limiter les bruits gênants provenant de l'extérieur de la salle pour les animaux
- En plexiglas transparent, fermé, plat surface de la piste (180 cm de long X 20 cm de large X 60 cm de haut) avec un trou carré (11 cm X 11 cm) situé dans le centre de la piste à égale distance de chaque extrémité
- Morceau de verre acrylique (10,5 cm X 10,5 cm)
- Double face scotch adhésif
- Ruban adhésif 3M réfléchissantes pour les marqueurs de la peau
- Perforation pour créer des marqueurs de peau
- Appareil d'anesthésie isofluorane requis pour les animaux anesthésiant pour le rasage avant le placement des marqueurs de la peau
- Cheerios pour les mouvements de l'animal en encourageant le long de la longueur de la piste
- AMTI HE6X6 forceplate
- Vicon Motus système personnalisé (logiciels, ordinateur, etc)
- 4 caméras vidéo (au moins 60 d'échantillonnage Hz) et trépieds avec câbles de connexion appropriés
- 4 lampes halogènes sur une caméra fournit un éclairage optimal pour l'éclairage du sujet animal et les marqueurs réfléchissants la peau
- Cadre approprié étalonnage de taille ou du volume nécessaire pour le système Vicon Motus pour calibrer x, y, z positions en mesures de distance significative
3. Dressage
Avant de recueillir des données, chaque animal doit être formé pour traverser une plate-surface, la piste fermée. Dès réception des rats d'un fournisseur animal approprié, les animaux doivent être acclimatés à leur nouvelle maison pour 1 semaine. Pendant ce temps d'acclimatation, Cheerios sont placés plusieurs quotidiens dans la cage du rat. Les animaux sont limités à l'alimentation de leurs besoins énergétiques d'entretien pour prévenir l'obésité et d'assurer la motivation pour effectuer cette tâche. Par la suite, chaque animal est manipulé par l'expérimentateur pendant 10-15 minutes par jour pendant 1 semaine. Durant cette même période, chaque animal est placé dans la piste avec Cheerios situés à chaque extrémité. Une fois que l'animal devient familier avec leur environnement, ils vont commencer à manger des céréales Cheerios. Une fois que l'animal est confortable et Cheerios manger dans la piste, l'expérimentateur doit alors opérante état de l'animal à courir la longueur de la piste pour une récompense alimentaire. Ceci est accompli en jetant cheerio ¼ à l'extrémité opposée de la piste où le rat est placé. Une fois que le rat mange ce cheerio, un autre cheerio ¼ est placé à l'autre bout de la piste. Ceci est fait pendant 15-20 minutes tous les jours jusqu'à la rate systématiquement (> 90% de lancers) se déplace le long de la piste à une vitesse constante (c'est à dire sans démarrer, d'arrêter, d'exploration ou sans changer la démarche) pour manger l'cheerio sans galop / englobante . Le rat ne doit être employant une démarche au trot. Plus de conditionnement des animaux à cette tâche peut conduire à des animaux au galop et de délimitation de ces allures sont indicatifs des animaux voyageant> 90 cm / s. Délimitation et au galop allures, biomécanique, sont plus difficiles à interpréter pour des raisons diverses (par exemple les critères d'inclusion jambe avant, etc.) Dans notre expérience, une fois les rats constamment emploient au galop ou bondissant allures, il est difficile, voire impossible, de les utiliser ont une démarche de trot tandis locomoting dans la piste. Vitesses> 90 cm / s sont rarement observées après un animal a souffert d'une lésion du système nerveux périphérique ou central. Temps pour atteindre la formation réussie est Variables entre les souches et les sexes de rats. Wistar, Lewis, Long-Evans, et Sprague-Dawley souches sont capables de parcourir régulièrement la piste dans les 2 semaines après le début de la formation 8. Dans notre expérience, Fischer (F-344) chez le rat ont tendance à prendre plus de 4-6 semaines pour apprendre cette tâche 8.
4. Position commune de marquage
Forelimb analyse cinématique n'est pas fiable en raison de mouvements de peau artefact imposées en plaçant des marqueurs de peau sur les pattes avant qui est exacerbé dans les espèces, comme les rats, qui ont une posture accroupie 9. Au lieu de cela, la cinématique des membres antérieurs doivent être réalisés en utilisant des rayons X cinématographie ou la fluoroscopie 10-13. En tant que tel, des membres postérieurs conjointe de placement marqueur de position est uniquement décrit aux présentes.
Avant la collecte de données, chaque rat doit être anesthésié au moins 24 heures à l'avance de la collecte de données en utilisant une anesthésie par inhalation approprié (par exemple isofluorane, 1,5-2% composé sur une vaporizor précision) et administré de l'oxygène au masque, et les principaux anatomiques topographiques repères doivent être marqués. Compte tenu de la brièveté de la procédure, et parce longue durée d'action des agents anesthésiques ne sont pas utilisées, l'utilisation d'un dispositif de réchauffement des animaux ne doivent pas être utilisés pour maintenir la température corporelle de l'animal. Une fois que l'animal est anesthésié, les membres postérieurs et le dos, au niveau des crêtes iliaques sont rasés. L'animal est ensuite placé en décubitus sternal et ses membres postérieurs sont placés dans une position debout approximative à l'aide de mousse ferme d'emballage pour le soutenir. La peau recouvrant les portions crânienne plus des crêtes iliaques, le grand trochanter du fémur, la tubérosité tibial externe, l'articulation du tarse, et la partie distale et latérale de la 5 e métatarse est marqué avec un marqueur non toxique permanente. L'animal est récupéré de l'anesthésie. Pour les études temporelles, l'anesthésie périodiques peuvent être nécessaires pour se raser les membres postérieurs permettant ainsi placement ultérieur marqueurs réfléchissants (voir ci-dessous). Aussi, chaque jour mettant en évidence des points de repère anatomiques précédemment marqués (en utilisant le même marqueur non toxique) sera nécessaire que les rats se retirer lentement les marqueurs par un comportement de toilettage naturel.
5. Enregistrement des données
Toutes les vues de caméra sont examinés afin de s'assurer que leur position est appropriée et capturer le même champ de vision. Chaque caméra doit être placée à environ 60-80 degrés à l'autre. Le champ de vision doit inclure les forceplate dans le centre et d'une longueur de piste suffisante pour capturer deux enjambées.
Le volume de calibration est placé dans la zone pré-déterminée de la piste. Un cadre unique de calibration du volume intérieur de la piste, à partir de chacune des caméras, est capturé. Toutes les marques calibrées sur toute la longueur de chacun des pôles sont numérisés. Une seule fois une erreur satisfaisante dans la numérisation est accompli, l'expérimentateur peut procéder à la collecte de données locomoteur. Cette étape de calibrage est essentiel avant de collecte de données. Si le calibrage n'est pas effectué correctement, ou si l'étalonnage n'a pas lieu immédiatement avant une session d'enregistrement, toutes les données résultant sera inexacte et inutilisable. Surtout, si l'un de ces caméras sont touchés ou déplacés, il est plus sûr de supposer que l'étalonnage du système doit être répété.
Immédiatement avant de placer l'animal dans la piste, son poids est enregistré et pré-faites coniques marqueurs réfléchissants la peau (en utilisant des bandes réfléchissantes 3M, voir tableau) sont respectées les marques pré-déterminé feutre sur les repères topographiques des membres postérieurs. Enregistrement du poids de l'animal permettra la normalisation rétrospective des forces de réaction du sol au poids du corps - un aspect important si l'on veut faire des comparaisons entre les groupes. De plus, la mesure du poids du corps facilite le suivi de la santé globale de l'animal pour la durée de l'expérience. Marqueur de placement ne nécessite que la manipulation des animaux appropriés et ne nécessite pas d'anesthésie de l'animal. Si l'adhésif sur le ruban réfléchissant est insuffisante pour adhérer à la peau de l'animal, une très petite quantité de colle non toxique (par exemple, 3M colle tissulaire Vetbond) peuvent être utilisés pour faciliter l'observance du marqueur sur le corps de l'animal. Une fois les marqueurs sont placés sur les membres postérieurs, l'expérimentateur doit être positionné confortablement près du clavier de l'ordinateur et avoir en main le marqueur d'événements attachés à travers le système Vicon Motus. Utilisation du fichier calibré comme un modèle, plusieurs fichiers sont faites à l'avance de l'enregistrement. Typiquement, 25 à 30 fichiers ont besoin d'être sauvé. Chaque fichier doit être nommé de manière unique. Chaque fichier sera enregistrée représentent une course de l'animal en cours d'enregistrement. Vingt-cinq à 30 fichiers sont nécessaires pour assurer qu'un nombre suffisant de pistes de réunion de la vitesse critère d'inclusion (c'est à dire 60-90 cm / s) sont collectées. Après un nombre suffisant de fichiers sont créés à l'expérimentateur peut commencer à recueillir des données. Le courrierxperimenter doit inciter le rat à l'intérieur de la piste de navette en jetant des morceaux de ¼ de Cheerios à chaque extrémité de la piste. Avec une coordination minutieuse et le calendrier, le marqueur d'événement est déclenché lors de l'initiation et juste avant l'achèvement du rat réussissant une passe le long de la piste. Après avoir examiné la force terrestre brut réactionnel traçage, et après l'enregistrement si la gauche ou la droite a frappé les membres de la plaque vigueur, le fichier est enregistré et fermé. Un nombre égal de gauche et de droite frappe forceplate membres devraient être enregistrées. Le processus d'enregistrement des données d'un essai donné est répété jusqu'à ce que suffisamment de pistes ont été enregistrées.
6. Analyse des données
Après avoir terminé la collecte de données pour la cinématique et les forces de réaction au sol, chaque série de chaque animal doit être évalué pour la vitesse. L'utilisation de deux marqueurs relativement fixe (par exemple les ailes de l'iliums), on peut évaluer un point virtuel entre les marqueurs (fait avant lors de la création d'un modèle de fichier Vicon Motus). Avant de calculer la vitesse de ce «virtuel» point, les marqueurs pour les marqueurs iliaques doivent être numérisées. Utiliser Vicon motus logiciel, la vitesse de ce point virtuel dans la direction X (direction horizontale du mouvement) est calculé. En ce faisant, ne fonctionne que dans un intervalle donné vitesses (déterminé a priori) sont utilisés dans les analyses finales. Nous constatons que les animaux se déplaçant entre 60-90 cm / s sont compatibles avec des allures de trot. Un minimum de 10 pistes (5 pistes où le membre gauche est en contact avec la plateforme de force et 5 séries où le bras droit est en contact avec la plateforme de force) sont obligatoires. Une fois les pistes acceptables sont identifiés pour chaque animal, la numérisation des marqueurs peau restante doit être rempli.
Pour compenser le mouvement d'artefact peau sur le genou, l'estimation de la position du genou est calculée par triangulation (intersection entre deux cercles cinématiques 2D ou intersection entre deux sphères 3D cinématique), comme cela a été décrit précédemment. Les angles des articulations de la hanche, du genou et du jarret, vitesses, accélérations et peut maintenant être déterminé. Stance et swing peuvent parfois aussi être évaluée, même si leur précision est limitée basée sur la vitesse d'échantillonnage des caméras employées. Ces calculs et d'autres peuvent être effectuées directement (ie sans l'exportation) en utilisant Vicon Motus KineCalc logiciels ou des données peuvent être exportées sous forme de données ASCII et analysées à l'aide des routines personnalisable dans les logiciels tels que Matlab.
Données au sol la force de réaction est mesurée et amplifiée par la plateforme de force AMTI et recueillis à 1200 Hz par Vicon Motus. En tant que tel, une fois les données de terrain force de réaction sont recueillis, une numériques appropriés filtre est appliqué aux données en utilisant Motus Vicon. Étant donné que l'expérimentateur a déjà déterminé la vitesse de déplacement et identifié fonctionne acceptable après la numérisation des marqueurs de peau échéant, des données de terrain force de réaction qui ont été recueillies simultanément les données cinématiques, peuvent être analysées à l'aide Vicon Motus KineCalc directement, soit indirectement en utilisant un autre logiciel personnalisable de routine. Une variété de variables pour les forces, dans chacune des trois directions orthogonales, peuvent être calculés. Ces variables comprennent la force maximale, und domaine de la courbe (c'est à dire d'impulsion), etc Il est important, cependant, l'expérimentateur doit conserver les données des membres droit et gauche pour chaque exécution de chaque animal séparé. Données extraites de branches droite ou la gauche est en moyenne pour chaque animal et utilisé comme données représentatives pour cet animal. Les données sont ensuite analysées à l'aide des procédures statistiques appropriées.
7. Les résultats représentatifs
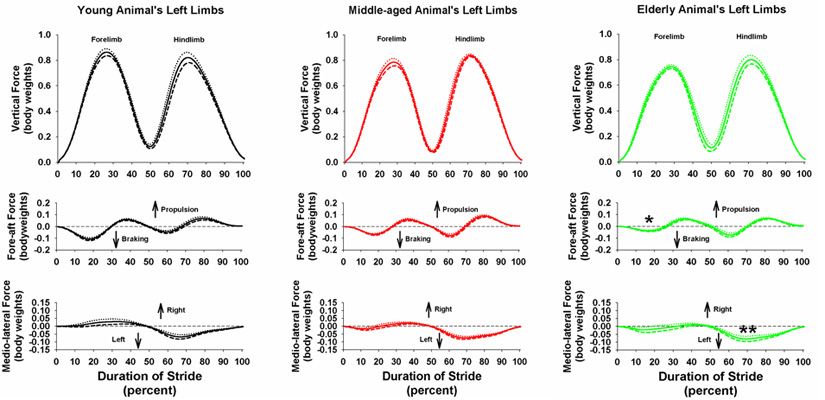
Pour représenter l'utilité de cette forme d'analyse de locomotion, la cinématique et les forces de réaction au sol ont été déterminées pour les jeunes, d'âge moyen, et gériatriques rats Wistar femelles. De cette analyse, liée à l'âge des différences ont été trouvées pour les rats Wistar femelles. En particulier, l'analyse de la force terrestre de réaction démontre que des rats de gériatrie ont réduit la capacité de freinage et des membres antérieurs ont tendance à utiliser leurs pattes arrière plus pour la stabilisation latérale par rapport aux autres groupes d'animaux (figure 1). L'analyse cinématique n'a pas révélé de différences statistiques entre chaque groupe, démontre bien que les cinématiques peuvent être facilement enregistrées à partir de pratiquement n'importe quel âge de rat (figure 2).

Figure 1 force de réaction au sol traçage prises de la gauche de membres jeunes. (4 mois, n = 7), d'âge moyen (13-14 mois, n = 7), et gériatriques (24 mois, n = 5) des rats Wistar femelles. Membres droits étaient similaires. Il est bien évident que les rats utilisent leurs pattes avant gériatriques moins pour le freinage (* = p <0,05) par rapport à des rats jeunes et d'âge moyen, et les rats de gériatrie ont tendance à utiliser leurs pattes arrière plus pour la stabilisation latérale par rapport à de jeunes rats (**). Les lignes continues représentent la moyenne, les lignes en pointillés représentent la moyenne ± SE; pointilléslignes représentent la moyenne SE. S'il vous plaît cliquer ici pour voir une figure plus grande.

Figure 2. Bâton chiffres cinématique pour le bras gauche du rat jeune, d'âge moyen, et en gériatrie. Stick Figures représenter le mouvement moyen de la jambe gauche pour chacun des groupes. Il n'y avait pas de différences significatives entre les groupes d'animaux pour l'angle conjointe au cours du cycle étape. S'il vous plaît cliquer ici pour voir une figure plus grande.
Discussion
Le présent document fournit une méthodologie pour évaluer la locomotion en utilisant la cinématique continue et la détermination quantitative de la force terrestre de réaction. Important pour quiconque s'intéresse à lancer dans cette méthodologie est une solide expérience en biomécanique de la locomotion, les animaux sensori le comportement et la gestion des données et la manipulation. Bien cinématique et la détermination du sol une force de réaction nécessite plus de temps et d'expertise, par rapport à certaines autres formes d'analyse locomoteur (mesures critère par exemple, des échelles de notation ordinale), les données obtenues est sensible, objective et quantitative pour une variété d'orthopédie 14-22 et neurologiques 1-3, 23-32 modèles de la maladie, dans une variété d'espèces.
Nous avons fourni des données qui décrit les différences dans la locomotion entre les différents âges de la souche appariés informations rats qui n'ont pas pu être glanée à l'aide de mesures simples et les moins sensibles. En outre, l'analyse cinématique et cinétique de la locomotion a été utilisé pour décrire des altérations de locomotion dans une variété de troubles du système nerveux, où d'autres formes d'évaluation seraient infructueuses. 8, 23-25, 27 L'utilisation de mesures sensibles devient particulièrement important quand on évalue le potentiel thérapeutiques pour différents modèles de la maladie. Si un test n'est pas assez sensible pour discerner l'effet d'un produit thérapeutique potentielle de l'expérimentateur prend le risque de commettre une erreur de type II statistique (ie conclusion il n'y a aucun effet d'un traitement, alors qu'en fait il y avait un effet). En outre, parce que les mesures et les tests critère plus subjectif que d'évaluer la locomotion, il existe un risque de partialité. L'évaluation cinématique et cinétique est purement objective en ce que, à condition appropriée d'inclusion / exclusion critère sont faites a priori, l'expérimentateur recueille tout simplement, examine et applique des statistiques appropriées pour les données (c'est à dire il n'ya pas de composante subjective de la détermination des données).
L'analyse cinématique et cinétique offre également la possibilité d'être utilisé pour une multitude d'espèces. En fait, la cinématique, la détermination de la force terrestre de réaction, ou les deux ont été utilisés dans une variété d'espèces comme les éléphants 33-35, 36 des bovins, des chevaux 37-40, 4 chiens, 41-45, 21 chats, 46-49, diverses rongeurs 3, 8, 50, 51, 4 oiseaux, 52-55, et les poissons 56, 57 (cette liste n'est pas exhaustive). Dans l'expérience des auteurs, cependant, l'utilisation de souris est problématique étant donné que les souris ne sont pas faciles à opérante état de voyager le long d'une piste. Compte tenu de cela, les souris ne se rendra pas à une vitesse relativement constante et, au lieu d'accélérer et de ralentissement lors de la traversée de la piste. Ce comportement peut probablement, en partie, être surmontée en exécutant souris sur un tapis roulant et de l'enregistrement vidéo locomoting animal sur le tapis roulant. 58 Si l'appareil expérimental pour la détermination de la force terrestre de réaction a été d'être modifiés pour un usage sur tapis roulant, la détermination de la force terrestre de réaction serait probablement être facilement obtenue pour une force de réaction du sol verticaux comme la ceinture de tapis roulant qui interfèrent avec avant-arrière et de détermination vigueur médio-latérale.
Au total, l'analyse cinématique et cinétique de la locomotion est une méthode fiable, sensible et objectif qui peut être employée pour différents modèles de conditions orthopédiques et neurologiques. Par ailleurs, tout l'équipement est devenu disponible pour une utilisation chez les rongeurs, niant ainsi toute raison liée pour ne pas exécuter cette forme de sensori analyse comportementale.
Disclosures
Aucun conflit d'intérêt déclaré.
Acknowledgments
Cette recherche a été soutenue par une subvention à la découverte d'AAW des sciences naturelles et en génie du Canada.
Materials
| Name | Company | Catalog Number | Comments |
| Low load miniature force platform | AMTI | HE6X6 | http://amti.biz/PDFDownloads/0908HE6x6.pdf |
| Vicon Motus | Vicon | Vicon Motus software | http://www.vicon.com/applications/animal.html The force platform can be purchased as an integrated package with the Vicon Motus system. |
| Vicon Motus KineCalc | Vicon | Vicon Motus KineCalc software | http://www.vicon.com/applications/animal.html Proprietary software compatible with Vicon Motus data, thus enabling direct and customizable data calculations. |
| Video Cameras | Vicon | Varies depending upon needs | http://www.vicon.com/applications/animal.html A minimum of 4 cameras are required for bilateral 2D or 3D imaging of hindlimb kinematics during rat locomotion. Cameras that sample at 60 Hz are sufficient for rats locomoting between 60 and 90 cm/s. High speed cameras will permit identification of very small, yet possibly important, differences in interlimb coordination. |
| Calibration volume or frame | Vicon | Custom | http://www.vicon.com/applications/animal.html An appropriate calibration volume must be purchased and used for calibrating the coordinates prior to performing videography each and every time of new data collection or if any of the cameras are moved. This dimensions of this calibration volume are based upon the field of view being examined. |
| Reflective tape | 3M | NA | Can be purchased bulk through a 3M distributor or on an as-needed basis from VICON http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us http://www.vicon.com/applications/animal.html |
| Cheerios | General Mills | Cheerios | http://www.cheerios.com/ |
| Tissue adhesive | 3M | Can be purchased through a 3M distributor http://solutions.3m.com/en_US/?WT.mc_id=www.3m.com/us |
References
- Muir, G. D., Webb, A. A. Mini-review: assessment of behavioral recovery following spinal cord injury in rats. Eur. J. Neurosci. 12, 3079-3086 (2000).
- Costa, L. M. Chapter 7: Methods and protocols in peripheral nerve regeneration experimental research: part IV-kinematic gait analysis to quantify peripheral nerve regeneration in the rat. Int. Rev. Neurobiol. 87, 127-139 (2009).
- Webb, A. A., Muir, G. D. Sensorimotor behavior following incomplete cervical spinal cord injury in the rat. Behav. Brain Res. 165, 147-159 (2005).
- Cavagna, G. A., Heglund, N. C., Taylor, C. R. Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243-R261 (1977).
- Biomechanics of the Musculo-skeletal System. Nigg, B. M., Herzog, W. , Wiley. New York, NY. (2007).
- Equine Locomotion. Back, W., Clayton, H. , W.B. Saunders. (2000).
- Alexander, R. M. Principles of Animal Locomotion. , Princeton University Press. Princeton, NJ. (2002).
- Webb, A. A., Gowribai, K., Muir, G. D. Fischer (F-344) rats have different morphology, sensorimotor and locomotor abilities compared to Lewis, Long-Evans, Sprague-Dawley and Wistar rats. Behav. Brain Res. 144, 143-156 (2003).
- Bauman, J. M., Chang, Y. H. High-speed X-ray video demonstrates significant skin movement errors with standard optical kinematics during rat locomotion. J. Neurosci. Methods. 186, 18-24 (2010).
- Boczek-Funcke, A. X-ray kinematic analysis of forelimb movements during target reaching and food taking in the cat. Eur. J. Neurosci. 12, 1817-1826 (2000).
- Boczek-Funcke, A., Kuhtz-Buschbeck, J. P., Illert, M. X-ray kinematic analysis of shoulder movements during target reaching and food taking in the cat. Eur. J. Neurosci. 11, 986-996 (1999).
- Boczek-Funcke, A. X-ray kinematography as a tool for investigations of distal limb movements of the cat. J. Neurosci. Methods. 52, 11-16 (1994).
- Alaverdashvili, M. Cineradiographic (video X-ray) analysis of skilled reaching in a single pellet reaching task provides insight into relative contribution of body, head, oral, and forelimb movement in rats. Behav. Brain Res. 192, 232-247 (2008).
- Sarver, J. J. Transient decreases in forelimb gait and ground reaction forces following rotator cuff injury and repair in a rat model. J. Biomech. 43, 778-782 (2010).
- Klaveren, N. J. van Force plate analysis before and after dorsal decompression for treatment of degenerative lumbosacral stenosis in dogs. Vet. Surg. 34, 450-456 (2005).
- Robinson, D. A. The effect of tibial plateau angle on ground reaction forces 4-17 months after tibial plateau leveling osteotomy in Labrador Retrievers. Vet. Surg. 35, 294-299 (2006).
- Conzemius, M. G. Effect of surgical technique on limb function after surgery for rupture of the cranial cruciate ligament in dogs. J. Am. Vet. Med. Assoc. 226, 232-236 (2005).
- Marsolais, G. S. Kinematic analysis of the hind limb during swimming and walking in healthy dogs and dogs with surgically corrected cranial cruciate ligament rupture. J. Am. Vet. Med. Assoc. 222, 739-743 (2003).
- Budsberg, S. C. Force plate analyses before and after stabilization of canine stifles for cruciate injury. Am. J. Vet. Res. 49, 1522-1524 (1988).
- Budsberg, S. C. Prospective evaluation of ground reaction forces in dogs undergoing unilateral total hip replacement. Am. J. Vet. Res. 57, 1781-1785 (1996).
- Romans, C. W. Use of pressure platform gait analysis in cats with and without bilateral onychectomy. Am. J. Vet. Res. 65, 1276-1278 (2004).
- Roush, J. K. Evaluation of the effects of dietary supplementation with fish oil omega-3 fatty acids on weight bearing in dogs with osteoarthritis. J. Am. Vet. Med. Assoc. 236, 67-73 (2010).
- Kemp, S. W. P. Behavioral and anatomical analysis of selective tibial nerve branch transfer to the deep peroneal nerve in the rat. Eur. J. Neurosci. 31, 1074-1090 (2010).
- Muir, G. D. Dorsolateral cervical spinal injury differentially affects forelimb and hindlimb action in rats. Eur. J. Neurosci. 25, 1501-1510 (2007).
- Webb, A. A., Muir, G. D. Course of motor recovery following ventrolateral spinal cord injury in the rat. Behav. Brain Res. 155, 55-65 (2004).
- Webb, A. A., Muir, G. D. Unilateral dorsal column and rubrospinal tract injuries affect overground locomotion in the unrestrained rat. Eur. J. Neurosci. 18, 412-422 (2003).
- Webb, A. A., Muir, G. D. Compensatory locomotor adjustments of rats with cervical or thoracic spinal cord hemisections. J. Neurotrauma. 19, 239-256 (2002).
- Miklyaeva, E. I. The ground reaction forces of postural adjustments during skilled reaching in unilateral dopamine-depleted hemiparkinson rats. Behav. Brain Res. 88, 143-152 (1997).
- Muir, G. D., Whishaw, I. Q. Red nucleus lesions impair overground locomotion in rats: a kinetic analysis. Eur. J. Neurosci. 12, 1113-1122 (2000).
- Muir, G. D., Whishaw, I. Q. Complete locomotor recovery following corticospinal tract lesions: measurement of ground reaction forces during overground locomotion in rats. Behav. Brain Res. 103, 45-53 (1999).
- Muir, G. D., Whishaw, I. Q. Ground reaction forces in locomoting hemi-parkinsonian rats: a definitive test for impairments and compensations. Exp. Brain Res. 126, 307-314 (1999).
- Muir, G. D., Steeves, J. D. Phasic cutaneous input facilitates locomotor recovery after incomplete spinal injury in the chick. J. Neurophysiol. 74, 358-368 (1995).
- Genin, J. J.
- Ren, L. The movements of limb segments and joints during locomotion in African and Asian elephants. J. Exp. Biol. 211, 2735-2751 (2008).
- Hutchinson, J. R. The locomotor kinematics of Asian and African elephants: changes with speed and size. J. Exp. Biol. 209, 3812-3827 (2006).
- Tol, P. P. vander The vertical ground reaction force and the pressure distribution on the claws of dairy cows while walking on a flat substrate. J. Dairy Sci. 86, 2875-2883 (2003).
- Nauwelaerts, S., Clayton, H. M.
- Wickler, S. J. Energetic and kinematic consequences of weighting the distal limb. Equine Vet. J. 36, 772-777 (2004).
- Biknevicius, A. R., Mullineaux, D. R., Clayton, H. M. Ground reaction forces and limb function in tolting Icelandic horses. Equine Vet. J. 36, 743-747 (2004).
- Clayton, H. M. Instrumentation and techniques in locomotion and lameness. Vet. Clin. North Am. Equine Pract. 12, 337-350 (1996).
- Walter, R. M., Carrier, D. R. Rapid acceleration in dogs: ground forces and body posture dynamics. J. Exp. Biol. 212, 1930-1939 (2009).
- Lister, S. A. Ground reaction force analysis of unilateral coxofemoral denervation for the treatment of canine hip dysplasia. Vet. Comp Orthop. Traumatol. 22, 137-141 (2009).
- Williams, S. B. Exploring the mechanical basis for acceleration: pelvic limb locomotor function during accelerations in racing greyhounds (Canis familiaris. J. Exp. Biol. 212, 550-565 (2009).
- Gillette, R. L., Angle, T. C. Recent developments in canine locomotor analysis: a review. Vet. J. 178, 165-176 (2008).
- Jayes, A. S., Alexander, R. M. Mechanics of locomotion of dogs (Canis familiaris) and sheep (Ovis aries). J. Zool. 185 Pt 3, 289-308 (1978).
- Frigon, A. Asymmetric changes in cutaneous reflexes after a partial spinal lesion and retention following spinalization during locomotion in the cat. J. Neurophysiol. 102, 2667-2680 (2009).
- Vilensky, J. A., Cook, J. A. Do quadrupeds require a change in trunk posture to walk backward. J. Biomech. 33, 911-916 (2000).
- Belanger, M. A comparison of treadmill locomotion in adult cats before and after spinal transection. J. Neurophysiol. 76, 471-491 (1996).
- Belanger, M., Drew, T., Rossignol, S. Spinal locomotion: a comparison of the kinematics and the electromyographic activity in the same animal before and after spinalization. Acta Biol. Hung. 39, 151-154 (1988).
- Fischer, M. S. Basic limb kinematics of small therian mammals. J. Exp. Biol. 205, 1315-1338 (2002).
- Witte, H. Torque patterns of the limbs of small therian mammals during locomotion on flat ground. J. Exp. Biol. 205, 1339-1353 (2002).
- Muir, G. D., Gowri, K. S. Role of motor and visual experience during development of bipedal locomotion in chicks. J. Neurophysiol. 94, 3691-3697 (2005).
- Muir, G. D. Locomotor plasticity after spinal injury in the chick. J. Neurotrauma. 16, 705-711 (1999).
- Reiter, K., Bessei, W. Gait analysis in laying hens and broilers with and without leg disorders. Equine Vet. J. Suppl. , 110-112 (1997).
- Griffin, T. M., Kram, R.
- Donley, J. M. Convergent evolution in mechanical design of lamnid sharks and tunas. Nature. 429, 61-65 (2004).
- Katz, S. L., Syme, D. A., Shadwick, R. E. High-speed swimming. Enhanced power in yellowfin tuna. Nature. 410, 770-771 (2001).
- Leblond, H. Treadmill locomotion in the intact and spinal mouse. J. Neurosci. 23, 11411-11419 (2003).

{kind=link}
{kind=link}