

Summary
שיטה זו שואפת לאתר פגמים אנכיים תת קרקעיים. כאן, אנו זוג לייזר עם אפנן אור מרחבי ולהפעיל קלט הווידאו שלה לחמם משטח מדגם דטרמיניסטית עם שני קווי אנטי אפקט מודולציה בעת רכישת תמונות תרמית נפתרה מאוד. העמדה פגם הוא נלקח מן הערכת גל הפרעה מינימלית גל.
Abstract
השיטה המוצגת משמש לאיתור פגמים מתחת לפני השטח, באופן אופייני אל פני השטח. כדי להשיג זאת, אנו יוצרים הרסנית להפריע שדות גל תרמי מופרעים על ידי פגם. השפעה זו נמדדת ומשמשת לאיתור הפגם. אנו יוצרים את שדות הגל המפריעים באופן הרסני באמצעות מקרן שונה. מנוע האור המקורי של המקרן מוחלף בלייזר דיודה בעל הספק גבוה עם סיבים. הקורה שלה מעוצבת ומתאימה למודול האור המרחבי של המקרן וממוטבת לתפוקה אופטימלית אופטימלית ולהקרנה הומוגנית, על ידי אפיון פרופיל הקורה, ושנית, תיקון זה באופן מכני ומספרי. מצלמת אינפרא אדום (IR) בעלת ביצועים גבוהים מוגדרת על פי המצב הגיאומטרי הצר (כולל תיקונים בעיוותים הגיאומטריים) והדרישה לאתר תנודות טמפרטורה חלשות על פני השטח המדגם. רכישת נתונים ניתן לבצע פעם סינכרוןRonization בין הפרט שדה גל תרמי מקורות, את הבמה סריקה, ואת מצלמת אינפרא אדום הוא הוקם באמצעות הגדרת הניסוי ייעודי אשר צריך להיות מכוונן את החומר הספציפי הנחקר. במהלך עיבוד הנתונים, המידע הרלוונטי על נוכחותו של פגם מתחת לפני השטח של המדגם מופק. הוא נלקח מהחלק המתנודד של הקרינה התרמית הנרכשת שמקורה מה שנקרא קו דלדול של משטח המדגם. המיקום המדויק של הפגם הוא להסיק מניתוח של הצורה המרחבית-טמפורלית של תנודות אלה בשלב הסופי. השיטה היא ללא התייחסות רגיש מאוד לשינויים בתוך שדה גל תרמי. עד כה, השיטה נבדקה עם דגימות פלדה אבל הוא ישים לחומרים שונים, כמו גם, בפרט לחומרים רגישים לטמפרטורה.
Introduction
הלייזר המוקרן לייזר תרמוגרפיה (LPPT) השיטה משמשת כדי לאתר פגמים מתחת לפני השטח, כי הם מוטבע בנפח של הדגימה הבדיקה מכוונת בעיקר בניצב על פני השטח שלה.
השיטה משתמשת בהפרעה הרסנית של שני שדות גל אנטי-שלבי תרמי של אותו התארכות ותדירות כפי שמוצג באיור 1b . בחומרים איזוטרופיים נטולי פגם, הגלים התרמיים מנטרלים באופן הרסני ( כלומר אפס תנודה) במישור הסימטריה על ידי סופרפוזיציה קוהרנטית. במקרה של חומר עם פגמים מתחת לפני השטח, השיטה מנצלת את האינטראקציה של המרכיבים לרוחב ( כלומר, בתוך המטוס) בין זרימת החום הארעית לבין פגם זה. אינטראקציה זו יכולה להימדד על התארכות הטמפרטורה נדנדה מחדש מחדש על קו הסימטריה על פני השטח המדגם. עכשיו, מדגם המכיל מדגם נסרק על ידי שדה גל תרמי superposed ורמת התארכות הטמפרטורה נמדדת ביחס למיקום המדגם. בשל סימטריה, מצב ההפרעה ההרסנית מתבצע שוב כאשר הפגם חוצה את המטוס הסימטרי; זה מאפשר לנו לאתר את הפגם מאוד רגיש. יתר על כן, מאז רמת הפרעה מקסימלית של הפרעה הרסנית בקורלציה עם עומק הפגם, ניתן לקבוע את עומקה על ידי ניתוח סריקה טמפרטורה 1 .
את LPPT ניתן להקצות את המתודולוגיה תרמוגרפיה פעיל, מבוססת היטב שאינו הרסני שיטה, שבו חימום חולף נוצר באופן פעיל וכתוצאה מכך, גם חולף, חלוקת הטמפרטורה נמדדת באמצעות מצלמה תרמית אינפרא אדום. באופן כללי, הרגישות של מתודולוגיה זו מוגבלת לליקויים אשר מכוונים בעיקר בניצב לזרימת החום הארעית. יתר על כן, מאז המשולב חולף חולף חום הולכה הוא differe חלקית פרבוליותמשוואה ntial, את זרימת החום לתוך נפח הוא חזק damped. כתוצאה מכך, עומק בדיקה של מתודולוגיה תרמוגרפיה פעיל מוגבל לאזור קרוב לפני השטח, בדרך כלל בטווח מילימטר. שתי הטכניקות הנפוצות ביותר של תרמוגרפיה פעילה הן פענוח ו - lock-in thermography. הם מהירים בשל תאורה משטחית אופטית 2 , אבל להוביל זרימת חום חולפת בניצב אל פני השטח. לכן, הרגישות של טכניקות אלה מוגבל ליקויים מקביל בכיוון מכוונת ( למשל delaminations או חללים) אל משטח המדגם מחומם. כלל אמפירי עבור תרמוגרפיה פעמונית קובע כי "רדיוס הפגם הקטן ביותר הניתן לזיהוי צריך להיות לפחות פי שניים עד לעומק שלו מתחת לפני השטח" 3 . כדי להגדיל את אזור האינטראקציה יעיל בין פגם בכיוון מכוונן ( למשל סדק) ואת זרימת החום, הכיוון של זרימת החום צריך להיותהשתנה. עירור מקומי, באמצעות לייזר ממוקד עם נקודה ליניארית או מעגלית למשל, מייצר זרימת חום עם רכיב בתוך המטוס כי הוא מסוגל לתקשר באופן יעיל עם פגם ניצב 4 , 5 , 6 , 7 .
בשיטה המוצגת, אנו משתמשים גם ברכיבי זרימת החום לרוחב כדי לאתר פגמים מתחת לפני השטח, אך אנו משתמשים בעובדה שניתן לגשר על גלי תרמה, בעוד שהליקויים, במיוחד אלו המכוונים אנכית, מפריעים לסופרפוזיציה זו. בדרך זו, השיטה המוצגת דומה לשיטה ללא התייחסות, סימטרי ורגיש מאוד, שכן ניתן לזהות פגמים תת קרקעיים מלאכותיים ביחס רוחב / עומק של הרבה מתחת 8 , 9 . עד כה, היה קשה ליצור שני שדות גל תרמי אנטי בשלבים המספקים אנרגיה מספקת. השגנו זאת בY צימוד של אפנון אור מרחבי (SLM) ללייזר דיודה בעל הספק גבוה, אשר איפשר לנו למזג את הכוח האופטי הגבוה של מערכת הלייזר עם רזולוציה מרחבית וזמנית של ה- SLM (ראה איור 2 ) למקרן בעל הספק גבוה . שדות גל תרמי נוצרים כעת על ידי המרה photothermal של שני דפוסי קו מודולציה anti-phase סינוס אופטי דרך בהירות פיקסל של התמונה המוקרנת (ראה איור 2 , איור 1 א ). זה מוביל חימום מובנה של משטח המדגם ותוצאות מוגדרים היטב להפריע שדות גל תרמי. כדי למצוא פגם מתחת לפני השטח, הפרעה של ההסקה הרסנית נמדדת כמו תנודה הטמפרטורה על פני השטח באמצעות מצלמת IR.
המונח גל תרמי, הוא שנוי במחלוקת כי גלים תרמיים לא להעביר אנרגיה בשל אופי מתפזר של התפשטות החום. ובכל זאת, יש התנהגות כמו גלים כאשר hea Ting מעת לעת, ומאפשר לנו להשתמש הדמיון בין גלים אמיתיים תהליכי דיפוזיה 10 , 11 , 12 . לפיכך, גל תרמי ניתן להבין כמו מאוד damped בכיוון התפשטות אבל תקופתיים לאורך זמן ( איור 1b ). אורך אופייני תרמי דיפוזיה  מתואר בזאת על ידי תכונות החומר שלה (מוליכות תרמית k , קיבולת חום c p וצפיפות ρ ), ואת תדירות עירור ƒ. למרות הגל התרמי הוא מתפורר מאוד, הטבע גל שלה יכול להיות מיושם כדי לקבל תובנה המאפיינים של המדגם. היישום הראשון של הפרעות גל תרמי שימש כדי לקבוע את עובי השכבות. בניגוד לשיטה שלנו, אפקט ההפרעה שימש בממד עומק ( כלומר בניצב אל פני השטח) Ref. "13. הרחבת הרעיון של הפרעה למימד השני על ידי פיצול קרן לייזר, הפרעה גל תרמי שימש גודל הפגמים מתחת לפני השטח 14. עדיין שיטה זו יושמה בתצורת השידור, כלומר, זה היה מוגבל על ידי החדירה עומק של גל תרמי.יתר על כן, כי רק מקור לייזר אחד שימש, שיטה זו חלה הפרעה קונסטרוקטיבית, כלומר הפניה ללא התייחסות יש צורך.בנוסף לרעיון של שימוש הפרעות גל תרמי, הגישה הטכנית הראשונה מרחבית ו חימום מבוקר זמני בוצע על ידי הולטמן ואח ' באמצעות מקרן גביש נוזלי ללא שינוי (LCD) עם מקור האור המובנה, אשר היה מוגבל מאוד כוח התפוקה האופטי שלה 15. גישות נוספות על ידי Pribe ו Ravichandran מכוון להגדיל את אופטי כוח הפלט על ידי גם צימוד לייזר ל SLM 16 , S = "xref"> 17.
מתואר בזאת על ידי תכונות החומר שלה (מוליכות תרמית k , קיבולת חום c p וצפיפות ρ ), ואת תדירות עירור ƒ. למרות הגל התרמי הוא מתפורר מאוד, הטבע גל שלה יכול להיות מיושם כדי לקבל תובנה המאפיינים של המדגם. היישום הראשון של הפרעות גל תרמי שימש כדי לקבוע את עובי השכבות. בניגוד לשיטה שלנו, אפקט ההפרעה שימש בממד עומק ( כלומר בניצב אל פני השטח) Ref. "13. הרחבת הרעיון של הפרעה למימד השני על ידי פיצול קרן לייזר, הפרעה גל תרמי שימש גודל הפגמים מתחת לפני השטח 14. עדיין שיטה זו יושמה בתצורת השידור, כלומר, זה היה מוגבל על ידי החדירה עומק של גל תרמי.יתר על כן, כי רק מקור לייזר אחד שימש, שיטה זו חלה הפרעה קונסטרוקטיבית, כלומר הפניה ללא התייחסות יש צורך.בנוסף לרעיון של שימוש הפרעות גל תרמי, הגישה הטכנית הראשונה מרחבית ו חימום מבוקר זמני בוצע על ידי הולטמן ואח ' באמצעות מקרן גביש נוזלי ללא שינוי (LCD) עם מקור האור המובנה, אשר היה מוגבל מאוד כוח התפוקה האופטי שלה 15. גישות נוספות על ידי Pribe ו Ravichandran מכוון להגדיל את אופטי כוח הפלט על ידי גם צימוד לייזר ל SLM 16 , S = "xref"> 17.
הפרוטוקול המוצג כאן מתאר כיצד ליישם את שיטת LPPT לאתר פגמים מתחת לפני הקרקע מונחה בניצב על פני השטח של דגימות פלדה. השיטה נמצאת בשלב מוקדם, אך חזקה מספיק כדי לאמת את הגישה המוצעת; עם זאת, הוא עדיין מוגבל במונחים של כוח הפלט האופטי השגה של ההתקנה הניסויית. מאז הגידול של כוח הפלט האופטי נשאר אתגר, השיטה המוצגת מוחל על פלדה מצופה המכיל מלאכותית פריקה חשמלית machches חריצים. אף על פי כן, הצעדים החשובים והקריטיים ביותר של הפרוטוקול, יצירת תאורה מובנית הומוגנית, עמידה בתנאים המוקדמים להפרעות גל תרמיות הרסניות ואיתור הפגם, עדיין מקיימים פגמים תובעניים יותר. מאז הכמות השולטת היא μL אורך דיפוזיה תרמית, שיטת LPPT ניתן להחיל על חומרים שונים רבים גם כן.
Nt ">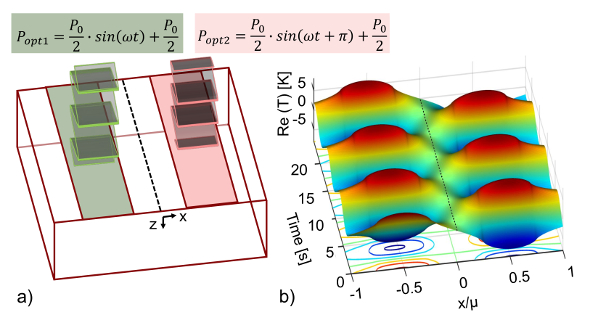
איור 1: עקרון השפעת ההפרעה ההרסנית. ( א ) סכמטי של דפוס תאורה בשימוש במהלך ניסויים. המדגם הוא מרחבי מחומם זמנית על ידי שני דפוסים מואר מדי פעם עם משמרת פאזה של π. הקו המקווקו מייצג את קו הסימטריה בין שתי הדפוסים. קו זה ישמש להערכה כ"קו דלדול ". ( ב ) דיאגרמה של תוצאה תרמית לסירוגין במרחב ובזמן נפתרה לסירוגין כפי שחושב מן הפתרון האנליטי של משוואת הולכה חום תרמית. זה מראה את הגלים התרמיים להגיב להארה של (א) עם אראדיאנס של שני דפוסים עם P Opt 1 = 1.5 W חטא (2π 0.125 Hz t ) + 1.5 ו P אופט 2 = 1.5 W חטא (2π 0.125 Hz t + Π) + 1.5 W עבור פלדה קונסטרוקטיבית 3 , c p = 461 J / (kg · K), k = 54 W / (m · K). פרופיל הטמפרטורה בקו המקווקו אינו מציג תנודה תרמית עבור חומר איזוטרופי הומוגני. אנא לחץ כאן כדי להציג גרסה גדולה יותר של דמות זו.

איור 2: סכמטי של עקרון המדידה של חימום מובנה המשמש תרמוגרפיה פעיל. קרן גאוס homogenized לפרופיל כובע העליון מוחל על אפנן אור מרחבי (SLM). ה- SLM פותר את הקורה באופן מרחבי על-ידי האלמנטים הניתנים לשינוי, וזמני המעבר שלהם. כל אלמנט מייצג פיקסל SLM. בניסוי זה, ה- SLM הוא מכשיר ראי דיגיטלי (DMD). על ידי מווסת את בהירות פיקסל A עם הזמן תוכנה שליטה דטרמיניסטית, משטח המדגםהוא מחומם בצורה מובנית. במקרה של הניסוי המוצג, אנו מווסתים שני קווים מנוגדים (Phase = 0, π), שהם המקור של הפרעה קוהרנטית של שדות גל תרמי בזווית התדר הזוויתי. שדות הגל אינטראקציה עם המבנה הפנימי של המדגם גם להשפיע על שדה הטמפרטורה על פני השטח. זה נמדד באמצעות קרינה תרמית שלה על ידי מצלמת אינפרא אדום באמצע גל. אנא לחץ כאן כדי להציג גרסה גדולה יותר של דמות זו.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
הערה: שים לב: שים לב לבטיחות לייזר מכיוון שההתקנה משתמשת בלייזר מסוג 4. יש ללבוש את משקפי המגן והבגדים הנכונים. כמו כן, לטפל לייזר לייזר עם טיפול.
1. זוג לייזר דיודה ערכת פיתוח מקרן (PDK)
- הכינו את קרש הלחם.
- להרכיב את כל המכשירים על לוח המחוונים כפי שמוצג באיור 3 . מניחים את לוח המחוונים עם כל המכשירים מראש במארז לייזר.
- מקמו את סיבי הלייזר על לוח המחוונים.
- צרף את הסיבים אל סיבי הלייזר הר ( ראה איור 3 ).
- החלף את התריס ואת סף הלייזר של לייזר הדיודה. באמצעות כרטיס חיישן IR גבוה, בדוק את קוטר היציאה (40 מ"מ) של הקורה. החלף את סף לייזר את לייזר לייזר על. התאם את הגובה של הציר האופטי על סיב לייזר הר לכניסה של PDK באמצעותשקע המעבדה ( ראה איור 4 א, 4 ד ).
- להזיז את סיבי הלייזר הר לאורך המסילה. שים לב למיקום של לייזר הטייס מרחוק. נקודת המרכז שלה לא צריכה לזוז. במקרה זה, לבדוק את הר בין שקע המעבדה ואת סיבי הלייזר הר. תקן את סיבי הלייזר הר לאחר מכן.
הערה: המסילה היא ההתייחסות לציר האופטי ויש לייצב אותה במקביל ללוח המקשים. עדשות הטלסקופ יש להסיר מראש.
- כוונן את הטלסקופ.
- השתמש הטלסקופ כדי להפחית את קוטר קרן מ 40 מ"מ ל 15 מ"מ כדי להתאים את הכניסה של PDK ( ראה איור 4 א, 4 ד ). השתמש 200 מ"מ ו 75 מ"מ עדשת קמורה כמו העדשה הראשונה והשנייה, בהתאמה. השתמש לייזר לייזר את הכוונת למקם את העדשה הראשונה ( ראה איור 4 ב ).
- בערך לשנות את המרחק בין שתי עדשות באמצעות סרגל פלדה. ללא שם: השתמש שוב את הכוונתכדי למקם את העדשה לייזר לייזר. הר את העדשה השנייה על הבמה תרגום XY. השתמש בשלב כדי לקבץ את הקורה.
- יישר את דוגמת הקורה.
- פגע (עם קרן הלייזר) את קרן sampler בזווית של 45 °. השתמש ברכבת השנייה בניצב הראשון כדי למקם את דגימת קרן.
הערה: רוב הספק האופטי מקורר באמצעות מד צריכת החשמל של 500 וולט. התפוקה האופטית של הלייזר דיודה יציבה יותר במלוא העוצמה, ולכן הכוח האופטי הוא מפוצל. - השתמש איריס בעמדה קבוע גובה לבדוק את הדרך נתיב אופטי לאורך המסילה ( ראה איור 4 א ) עם לייזר הטייס.
- פגע (עם קרן הלייזר) את קרן sampler בזווית של 45 °. השתמש ברכבת השנייה בניצב הראשון כדי למקם את דגימת קרן.
- ישר את המראה.
- לפני יישור המראה כפי שמוצג באיור 4 ג , הסר את PDK ואת צלחת הבסיס שלה. תקן רכבת שלישית ניצב השני. שוב, לבדוק את הנתיב האופטי על ידי קשתית העין.
הערה: הנתיב האופטי sיש ליישר את כיוון הרכבת. הקורה צריכה להיות collimated.
- לפני יישור המראה כפי שמוצג באיור 4 ג , הסר את PDK ואת צלחת הבסיס שלה. תקן רכבת שלישית ניצב השני. שוב, לבדוק את הנתיב האופטי על ידי קשתית העין.
- לפרק ולמקם את PDK.
- לפני מיקום PDK 18 , להסיר את מנוע האור המקורי.
הערה: היו שתי עדשות לשעבר במקור collimating נוריות של PDK 19 ( ראה איור 4 ד , כניסה). הם מודבקים צריך להסיר באמצעות אצטון. - יישר את הפלטפורמה של PDK כדי להיות מקביל למעקה השלישית ולכן הציר האופטי של הקורה. השתמש את הכוונת מותאמת הכניסה של PDK למקם את PDK יחסית הקורה. הישאר במקביל. להחליף את הטייס לייזר, כי זה חלש מדי כדי לעבור את PDK.
- לפני מיקום PDK 18 , להסיר את מנוע האור המקורי.
- פרוייקט תמונה לבנה כדי לבדוק את הכוח האופטי.
- ודא כי כבל HDMI וכבל USB של PDK, כמו גם את כרטיס רכישת נתונים (DAQ) מחובריםלשלוט במחשב. חבר את היציאות של תיבת הבקרה לייזר עבור "תריס לייזר", "סף לייזר" ו "לייזר על" כרטיס DAQ. חבר את "מתח בקרת הלייזר" של סורק תיבת הבקרה לכרטיס DAQ.
- הפעל את תוכנת הבקרה PDK 20 ולהגדיר את זה כמקרן רגיל בעקבות השלבים i.1 ל i.3 של איור 5 ב . הפעל את המסך השני וודא שאין חלון בתוך המסך השני. השתמש רקע לבן שולחן העבודה לבדוק את הפונקציה של המקרן עם אור LED LED כמקור אור קלט.
הערה: אם התמונה הלבנה מתוכננת למישור התמונה של PDK, ההתקן פועל כהלכה.
- בדוק את כוח הקלט האופטי.
- שים את 30 מטר כוח ראש מטר מחובר יחידת כוח מטר שליטה בנתיב אופטי מול PDK ( ראה איור 4e - מיקום 1). החלף את הדיודה לייזרעם תוכנת בקרת לייזר LPPT בעקבות השלבים i.1 ל i.3 של איור 5 א ) ברמת הספק נמוכה של שלב i.1 = 0.5 V.
הערה: תוכנת בקרת הלייזר של LPPT ממירה את כרטיס DAQ שממיר את תפריטי בקרת הלייזר ( השווה 1.7.1). שקול בטיחות לייזר, משקפיים ללבוש בגדים מגן! - בדוק את מיקום חיישן מד צריכת החשמל באמצעות כרטיס חיישן IR גבוה. החזק את כרטיס ה- IR לתוך הקורה ולצפות בו זוהר. התאם את קוטר הקורה לאזור חיישן מד החשמל ( איור 3 ).
- בדוק את כוח הקליטה אופטי מקסימלי בכניסה של PDK (שוב בצע איור 5 א ), שלב i.1) עם ערך של 10 V.
הערה: כניסת הקלט האופטי בכניסה ל - PDK צריכה להיות מקסימלית בסביבות 22 W 21 . בתצורה זו, פעמים מדידה עד 5 דקות היו נסבלים מבלי להרוס את SLM, וזה במקרה של PDK הבין כמו מכשיר micromirror דיגיטלי (DMD). - בדוק את עוצמת היציאה האופטית.
- מקמו את 30 מטר כוח מטר ראש במרחק משוער של 60 מ"מ ל PDK באמצעות AF = 60 מ"מ עדשה המצורפת המטרה PDK ( ראה איור 4e ).
- מקמו את נורית ההבזק הנורית בפתח המקרן ( ראה איור 4 ד ) והפעילו אותו. לכוונן את המיקום של ראש מטר כוח כזה שהוא אוסף את האור של התמונה המוקרנת כפי שמוצג בתרשים 4e . הסר את נורית ההבזק לאחר מכן.
- הפעל את תוכנת בקרת הלייזר LPPT. הזן '0.5 V' לתוך השדה "מתח" ולחץ על "לייזר על!" לַחְצָן. קרא את הכוח האופטי ממכשיר בקרת מתח. עצור את הלייזר על ידי לחיצה על כפתור "עצור". חזור על שלבים אלה עבור 2 V, 6 V, 10 V ( ראה איור 5 א , i.1 ל i.3).
הערה: אם מתח של 10V מספק הספק יציאה אופטית של &# 62; 4 W, הבדיקה הראשונית מוצלחת. מעבר לכך, יש לבדוק את היישור האופטי. נסו למקסם את כוח הפלט האופטי באמצעות כוונון עדין של המראה.
- מדוד את פרופיל הקרן.
- השתמש דיודה צילום עם מגבר חורים כדי למדוד את פרופיל קרן של התמונה המוקרן וכתוצאה מכך ( ראה איור 4F ). אם מאפיין קרן זמין, השתמש במכשיר זה אך מחליש את הקורה.
- צרף את דיודת הצילום לשלב תרגום שהוא עצמו מותקן על סוגר. גם לצרף נייטרלי צפיפות (ND) 1 מסנן רפלקטיבי ואת חור פינה 1 מ"מ לדיודה. מניחים את דיודת הצילום על גבי שלב תרגום ממונע ושקע המעבדה. כדי לקבל גובה, השתמש בשתי לוחות (100 מ"מ x 100 מ"מ).
- השתמש AF = 100 מ"מ עדשה לאחר PDK אובייקטיבי ( ראה איור 4e ) ופרוייקט תמונה לבנה באמצעות אור LED LED ( השווה שלב 1.7). הזז את דיודת הצילום למישור התמונהוודא כי טווח הדיודה צילום נע בשלב התרגום הוא בתוך התמונה המוקרנת ( ראה איור 4F ).
- חבר את דיודת הצילום לאספקת החשמל וכרטיס ה- DAQ. השתמש 40 הגברה dB עבור 6 מתח הבקרה V עבור כוח לייזר אופטי. חבר את בקר התנועה עבור שלב התרגום הממונע למחשב הבקרה.
הערה: תוכנת עוצמת ה- LPPT שולטת בתנועה של דיודת הצילום המקומט דרך האזור המואר במהירות קבועה של v = 0.1 mm / s ורושמת את אות דיודת הצילום ב -100 קילו-הרץ. הלייזר נשלט גם באמצעות תוכנה. - השתמש בורג מיקרומטר של הבמה צעדים 1 מ"מ כפי שמוצג באיור 4F כדי לסרוק את התמונה. ראה תוצאות המוצגות בתרשים 6 א -6 ב .
- חשב את תמונת התיקון.
- כדי לתקן את inhomogeneity של פרופיל קרן, לחשב מטריקס הפוכה הפוכה לגבי הקורהפּרוֹפִיל. זהה את טווח התמונה המוקרנת באמצעות אלגוריתם זיהוי קצה.
- לשנות את מידע הזמן לתוך מידע מרחבי באמצעות מהירות הבמה. לשנות את המידע המרחבי לתחום הפיקסלים של PDK עם x = 1,024 פיקסלים ו- y = 768 פיקסלים. מנרמל את אות הדיודה לערך המרבי.
הערה: רמת הייחוס עבור תיקון נבחרה עם ממוצע של כל ערכי התמונות מנורמל. רמת הנחתה מחושבת עם:
P פיקסל הוא עוצמת דיודה מנורמל לכל פיקסל. ערכים של LC פיקסל מעל 1 נקבעים 1. - הכפל את מטריצת התיקון ( ראה איור 6 ג ) עם תמונה לבנה ומודדת את הפרופיל שוב כדי לבדוק אם התיקון היה מספיק ( ראה איור 6e-6h ).
2. הכן את המדגם
- שים את 30 מטר כוח ראש מטר מחובר יחידת כוח מטר שליטה בנתיב אופטי מול PDK ( ראה איור 4e - מיקום 1). החלף את הדיודה לייזרעם תוכנת בקרת לייזר LPPT בעקבות השלבים i.1 ל i.3 של איור 5 א ) ברמת הספק נמוכה של שלב i.1 = 0.5 V.
- השתמש בשני בלוקים של 100 מ"מ x 100 מ"מ x 40 מ"מ של פלדה קונסטרוקטיבית St37 כחומר המדגם עם צפיפות של ρ = 7,850 ק"ג מ -3 , מוליכות תרמית k = 54 W · m -1 · K -1 , ויכולת החום Of c p = 461 J · kg -1 · K -1 .
- הכנס פגמים מלאכותיים בשני בלוקים ב 0.25 מ"מ, 0.5 מ"מ, 0.7 מ"מ, 1.25 מ"מ ו 1 מ"מ, 1.5 מ"מ, 1.75 מ"מ, 2 מ"מ על ידי עיבוד פריקה חשמלית מתחת לפני השטח כפי שמוצג באיור 7 .
- קלטת את הפגמים עם קלטת מגן. Sandblast את פני השטח העליון כדי לקבל קליטה הומוגנית. קלטת את הפגמים עם סרט מגן לפני ציפוי. Degrease את פני השטח באמצעות אצטון.
- מעילים את האזור מואר עם תרסיס גרפיט מ 30 מ"מ מרחק פעמיים (0 ° ו 90 °). ציפוי מוצלח אם יש משטח הומוגני. אם הציפוי אינו שלם, להתחיל degreasing וניקוי שוב וחזורשלב הציפוי. יבש את פני השטח ~ 2 ח. אל תיגע פני השטח, זה יהיה לשנות emissivity.
- הסר את הקלטת ולוודא כי גרפיט אינו נכנס לליקוי מתחת לפני השטח.

3. הכן את הניסוי
- הכן לייזר PDK ודיודה.
- פרוייקט תמונה לבנה כמתואר בשלב 1.7). בדוק את כוח הקלט האופטי של PDK כמתואר בשלב 1.8). בדוק את כוח הפלט האופטי של PDK כפי שמוצג בשלב 1.9).
- חבר את ראש יחידת הכוח 500 וולט ליחידת בקרת מד צריכת החשמל וחבר את מד צריכת החשמל למחשב הבקרה (PC) באמצעות כבל USB.
- הכן את בקר התנועה ומקם את המדגם.
- חבר את בקר התנועה לשלב התרגום ולמחשב הבקרה באמצעות כבל USB. למקם את הבמה תרגום אורתוגונליים לציר אופטי במרחק של כ 80 מ"מ ביחס PDK.
הערה: ה- LPPTE, פועל על המחשב שליטה שולטת בקר תנועה. - צרף את העדשה F = 100 מ"מ את המטרה PDK. השתמש בנורית הבזק של LED כמקור אור קלט ( ראה איור 4 ד , הכוונת מציינת את הכניסה) ל- PDK כדי למצוא את מטוס התמונה של המקרן.
- הצב גיליון נייר לבן במרחק משוער של 100 מ"מ לפני המטרה והזז אותו קדימה ואחורה כדי למצוא את המישור של המלבן המואר החדות, שהוא מטוס התמונה.
- הצב את משטח המדגם המצופה במישור זה. הגדר את גובה המדגם באמצעות שקע המעבדה מותקן לשלב התרגום לינארי. בחר את גובה כזה כי החלק העליון של המלבן מואר פוגע בחלק העליון של המדגם ( ראה איור 4 ג ' ). מקם את הפגם שהוא בטווח של האזור המואר.
- אפס את בקר התנועה על-ידי כיבוי ההתקן וכיבויו.
- חבר את בקר התנועה לשלב התרגום ולמחשב הבקרה באמצעות כבל USB. למקם את הבמה תרגום אורתוגונליים לציר אופטי במרחק של כ 80 מ"מ ביחס PDK.
- הכן את המצלמה ומקם את המראה זהב.
- השתמש בנורית הבזק LED כמקור אור קלט עבור המקרן כדי להקרין תמונה לבנה למדגם.
- מניחים את המראה זהב בגובה כזה שהוא רואה את הקצה העליון של המדגם ( איור 4G ). הגדר את המראה בזווית של כ 35 ° כפי שמוצג באיור 3 . מקם את המראה זהב קרוב ככל האפשר את המטרה PDK אבל לא הצללה היטל.
הערה: המראה מחוברת לפוסט בעלון דואר מותקן. גובה ומיקום קבועים על ידי מלחציים. - הרכוב את מצלמת ה- IR אל החצובה. רמה את המצלמה IR עם רמת bullseye. התאם את המצלמה IR לגובה המטרה PDK. מקם אותו כך שהוא רואה את התמונה הלבנה המוקרנת מעל המראה זהב.
הערה: המרחק המשוער לאורך המסלול האופטי הוא סביב 1 מ '. - השתמש טבעת spacer בין המטרה מצלמת IR מצלמת IR. עשהבטוח קלט את ההדק של המצלמה מחובר נתונים רכישת כרטיס נתונים על מנת להפעיל את מסגרת תופס. כמו כן, חבר את מצלמת הבקרה של מצלמת ה- IR למחשב ה- IR באמצעות כבל LAN.
- הפעל את המצלמה וחכה לפחות לזמן החימום ( כ -30 דקות).
- הפעל תוכנת בקרת מצלמה אינפרא אדום. שנה את פריט שורת התפריטים ל "מצלמה". לחץ על הלחצן "חבר" כדי לחבר את מצלמת ה- IR ( ראה איור 8 א , שלב i.1).
הערה: המצלמה מציגה תמונה חיה של הסצנה. - לחץ על כפתור "מרחוק" כדי לפתוח את לוח "שלט רחוק" ( ראה איור 8 ד , שלב i.2). בחר את הכיול "HF 100mm (-10 ° C - 60 ° C) 1140 μs". ראה איור 8 ד ' , שלב i.2.1.
הערה: טווח הכיול צריך להיות קטן ככל האפשר על מנת להפחית את הרעש. - כוונן את טבעת המיקוד של העדשה באופן ידני כדי למקד את מצלמת ה- IR למטוס מדגם e.
הערה: חשוב שדה הראייה של המצלמה הוא גדול כמו השטח המוקרן המקסימלי על מנת לקבל את רזולוציה מרחבית מקסימלית ( ראה איור 4 ג ' ). ייתכן שיהיה צורך לשנות את המיקום, גובה וכיוון של המצלמה IR. כדי להחליט אם תמונה חדה, יש צורך בניגוד טמפרטורה במישור התמונה. ניתן להשתמש בסרגל פלדה כדי ליצור ניגוד. אם תמונת IR עדיין יש ניגודיות נמוכה, ניתן להתאים אותו באמצעות כלי הבחירה ( ראה איור 8 ג , i.3) - בצע תיקון לא אחידות על ידי לחיצה על כפתור "NUC" ( ראה איור 8 ד ' , שלב i.2.2). לכסות את המטרה המצלמה IR ולחץ על כפתור "אישור".
- לקבוע את הקשר בין תחום פיקסל IR מצלמה וקואורדינטות מקרן.
- לקבוע את הקשר בין תחום פיקסל PDK, תחום פיקסל IR המצלמה ואת leבקנה מידה ngth של המדגם על ידי הקרנת תמונה לבנה או דפוס למשטח המדגם ( ראה איור 4 גרם, ח ). למדוד את האזור המוקרן באמצעות סרגל פלדה אשר נותן את הקשר בין תחום PDK לבין קנה המידה של המדגם.
- השתמש f = 100 מ"מ עדשה המצורפת המטרה PDK- כדי לקבל שטח מואר של 21.3 מ"מ x 16 מ"מ (4: 3).
הערה: סולם האורך בקואורדינטות PDK הוא: 1 פיקסל מוקרן = 21.3 מ"מ / 1,024 פיקסלים - מצא את הקשר בין המצלמה PDK ו IR. חזור על שלב 1.9.3) עבור 10 V.
- השתמש בתוכנה IR המצלמה כדי לשנות את שורת התפריטים הפריט "למדוד". בחר את "כלי קרוס" מ "למדוד אזורים" סרגל הכלים ( ראה איור 8 ג ), שלב i.4). סמן את פינות התמונה התרמית המתקבלת על ידי לחיצה שמאלית על המסגרת המוצגת.
- לחץ לחיצה ימנית על הצלב כדי להגיע לחלון המאפיין. שנה ל"קואורדינטות "ורשום אותןטרנספורמציה מאוחרת יותר של התמונה התרמית למערכת קואורדינטות PDK.
4. ליישם את הניסוי
- הכן את הניסוי.
- הערכת אזור תאורה יחסית לאורך קנה המידה של המדגם.
- השתמש בעדשה F = 100 מ"מ כדי לקבל שטח מואר של 5.5 מ"מ x 16 מ"מ לכל תבנית. בחר שטח של 5.5 מ"מ x 16.5 מ"מ בין אותם אשר אינו מואר.
הערה: ההקרנה המתקבלת היא כ -1.2 W / cm².
- השתמש בעדשה F = 100 מ"מ כדי לקבל שטח מואר של 5.5 מ"מ x 16 מ"מ לכל תבנית. בחר שטח של 5.5 מ"מ x 16.5 מ"מ בין אותם אשר אינו מואר.
- הערכת אזור תאורה ביחידות יחסית לתחום ה- PDK פיקסל.
- לשנות את המיקום דפוס מואר לתחום פיקסל של PDK (1,024 פיקסלים x 768 פיקסלים) באמצעות המשוואה בשלב 3.4.2). השתמש ב- [512, 1]; (512, 768)] פיקסלים בתחום PDK כמו קו דלדול, שהוא סימטרי בין שתי הדפוסים.
- חישוב המספר הכולל של מסגרות, זמן המדידה ומסגרות peתקופת. בהנחה של מהירות v = 0.05 mm / s, מרחק נסיעה של מרחק x = 10 מ"מ וקצב מסגרת PDK ƒ r = 40 הרץ, לחשב את זמן המדידה t דרך t = x / v = 200 s. כמו כן, לחשב את מספר מסגרות לא ƒ = ƒ r • t = 8,000. עם תדירות עירור של ƒ = 0.125 הרץ, לחשב את המסגרות לכל תקופה p עם p = לא ƒ / t ƒ = 320 מסגרות / תקופה.
הערה: ערכים אלה ישמשו ליצירת התמונות המוקרנות. - בדוק את ההתקנה ולוודא כי מערכת לייזר, מצלמת IR ו (אופציונלי) בקרת טמפרטורה מחובר כרטיס DAQ. בדוק אם מד צריכת החשמל 500 W, PDK ו שלב ליניארי מחוברים למחשב הבקרה.
- הערכת אזור תאורה יחסית לאורך קנה המידה של המדגם.
- הגדר את מחשב בקרת המצלמה.
- להגדיר את תוכנת בקרת המצלמה IR לתפוס מסגרת כאשר מצלמת IR מקבל קלט ההדק. לשם כך, sמכשפה ללוח "מצלמה" ולחץ על כפתור "מרחוק" ( ראה איור 8 א , שלב i.2) כדי לפתוח את לוח הבקרה מרחוק. בחר "תהליך IO" מהתפריט הנפתח ( איור 8d , שלב i.2.3) ולאפשר "Sync In" ו "שער" ולסגור את התפריט.
- פתח את תפריט הרכישה על ידי לחיצה בפינה הימנית התחתונה של הכרטיסייה "רכישת פרמטרים" ( ראה איור 8 א , i.5). בחר "Ext / Sync" מהתפריט הנפתח ( ראה איור 8 ב , i.5.1). שם המדידה על ידי הזנת שמות קבצים ותיקיות לשדה "תיקיה" (ראה איור 8 ב , i.5.2).
- הזן את מספר המסגרת הכולל המחושב משלב 4.1.3 לשדה "count" ( ראה i.3.3). סגור את תפריט הרכישה ולחץ על כפתור "הקלט" כדי להתחיל את רכישת נתוני מצלמת ה- IR ( ראה איור 8 , i.6).
הערה:ההקלטה תתבצע רק אם יש קלט מפעיל מכרטיס DAQ.
- בצע את הניסוי.
- הפעל את תוכנת הבקרה LPPT. הפעל את בקר התנועה על ידי לחיצה על "הפעל?" כפתור ( איור 9 א , i.1). הגדר את הפרמטרים המניעים "StartPosition" = "-5 mm", "EndPosition" = "5 מ"מ" ו "מהירות" = "0.05 mm / s" על ידי עריכת השדות המתאימים כפי שמוצג באיור 9a , i.1. לחץ על הלחצן "התחל מדידה" (ראה איור 9 א , i.2).
הערה: במקרה שלא ברור היכן נמצא הפגם, בחר מרחק נסיעה גדול יותר במהירות גבוהה יותר. שימו לב לגידול הטמפרטורה של PDK, ואת כמות הנתונים שנוצרו. שים לב שיופיע ממשק משתמש להפקת תמונות המסגרת ( ראה איור 9 ב ). - ליצור את התמונות מסגרת מוקרן. <Ol>
- לחץ לחיצה ימנית על השדה 'בחר אזור צבע'. בחר צבע עבור אזור התבנית מתיבת הדו-שיח 'צבע' ( איור 9 , i.3). בחר את 'כלי מלבן' מסרגל הכלים ציור בפינה השמאלית העליונה.
- צייר מלבן על אזור התמונה על ידי לחיצה שמאלית והחזקה תוך הרחבת אזור התמונה. השתמש בקואורדינטות דפוס שהשתנו משלב 4.1.2) כדי לקבוע את קואורדינטות המלבן המוצגות בפינה השמאלית התחתונה (i.4). לחץ על "הגדר אזור" כפתור ( איור 9b , i.5).
הערה: קואורדינטות הפיקסלים הממוחשבות בתחום ה- PDK בגודל של 5.5 מ"מ הן: Rectangle 1 (x1 = 116, y1 = 1; x2 = 380, y2 = 768), מלבן 2 (x1 = 644, y1 = 1; x2 = 908, y2 = 768). לאחר לחיצה על הלחצן "הגדר אזור", תופיע תיבת דו-שיח להגדרת מאפייני הדפוס.
- הפעל את תוכנת הבקרה LPPT. הפעל את בקר התנועה על ידי לחיצה על "הפעל?" כפתור ( איור 9 א , i.1). הגדר את הפרמטרים המניעים "StartPosition" = "-5 mm", "EndPosition" = "5 מ"מ" ו "מהירות" = "0.05 mm / s" על ידי עריכת השדות המתאימים כפי שמוצג באיור 9a , i.1. לחץ על הלחצן "התחל מדידה" (ראה איור 9 א , i.2).
- הגדר את מאפייני הדפוס ( איור 9 ג , i.6).
- בחר "גל סינוס" מהתפריט הנפתח על ידי לחיצה שמאלית על השדה "סוג אות". הגדר את הפרמטרים תנודה על ידי הגדרת השדות "שלב Shift" ל "0 °", "תדר" ל "0.125 הרץ" ו "משרעת" ל "127" (שינוי פאזה של 0 עבור הדפוס הראשון ומשמרת פאזה של π עבור השני).
- הגדר את מתח הלייזר ל 10 V על ידי הוספת "10" לשדה "מתח". הדבק 320 בשדה "Pics / period" תוך שימוש בערך משלב 4.1.3). לחצו על הלחצן "הבא". זה סוגר את הלוח.
הערה: תוכנת הבקרה LPPT מחשבת זרם תמונה תקופתי ברזולוציה של PDK. כמו פיקסל לבן אומר כוח אופטי מקסימלי שחור אפס כוח אפס, שני דפוסי נדנוד מחושבים. הערך האפור של התבנית הראשונה מחושב עם P 1 = 127 חטא (2π 0.125 Hz) + 127 וזה של השני עם P 2 = 127 חטא (2π 0.125 Hz t+ Π) + 127 (ראה איור 2 , גרף), ואילו הזמן t הוא discretized לקצב המסגרת הנבחר ( ראה שלב 4.3.4).
- צור את הדגם המוקרן השני.
- חזור על שלבים 4.3.2) ו 4.3.3) בעקבות זרימת עבודה של איור 9, אבל עם צבע שונה "שינוי שלב" שונה של "180 °". לחץ על "מסגרות Calc" כפתור לחשב את דפוסי מוקרן. הגדר את PDK ו IR מסגרת המצלמה הדולר להיות "40 הרץ" את popped up תיבת הדו שיח.
- טען את תמונת התיקון.
- בצע את זרימת העבודה של איור 9b ), שלב i.12. בחר בלוח "תיקון עומס", וספק את הקובץ עבור התמונה המחושבת משלב 1.11). טען את תמונת התיקון על ידי לחיצה על הלחצן.
- התחל את המדידה על ידי לחיצה על כפתור "התחל" ( ראה איור 9b , שלב i.13).
הערה: המסגרות המחושבות יוצגו על המדגם בזמן שהבמה נעה. המסגרות יירכשו ונספרו על ידי תוכנת בקרת המצלמה IR. - עצור את המדידה כאשר כל המסגרות נרכשות (התקדמות בר = 100%) על ידי לחיצה על כפתור "עצור מדידה" ( ראה איור 9 א , i.14).
הערה: תווית הכפתור תשתנה אם תלחץ.
5. לאחר עיבוד קובץ הנתונים
- הפעל את תוכנת עיבוד שלאחר LPPT. לחץ על הלחצן "טען" ובחר את קובץ המדידה בתיבת הדו-שיח של הקובץ. לחץ על "אישור" כדי להפוך את פורמט הנתונים המצלמה לכתוב עיבוד נתונים בפורמט ( ראה איור 10 א ).
הערה: נתוני מצלמת ה- IR מאוחסנים במחשב ה- IR של מצלמת ה- IR בתבנית מקורית. המצלמה IR שליטה על פיתוח תוכנה משמשת כדי להמיר את רצף המצלמה IR למטריצה 3 מימדי (פיקסל X, פיקסל Y, מספר מסגרת) וכותרת כולל וקטור תזמון. - להפוך את נתוני המצלמה IR לתחום PDK ( ראה איור 10 ב ), על ידי הוספת הקואורדינטות של ארבעת נקודות ההקרנה P1x ל P4y משלב 3.4.3), ולחיצה על "שינוי".
הערה: בשל הקרנת התמונה דרך המראה זהב המצלמה IR ( ראה איור 4g ), התמונה IR וכתוצאה מכך מעוות. שינוי גיאומטרי אפין מבוצע מתוך תחום מצלמת IR לתחום PDK. התוצאה היא מטריצה בגודל 1,024 x 768 x מספר מסגרת. - לחלץ מידע הטמפרטורה על קו דלדול ( ראה איור 10 ג ).
- הגדר את קו האזילה בשתי נקודות L1 ו L2 על ידי מילוי השדות L1x = Lx2 = "512" פיקסל כפי שהוא כבר נבחר בשלב 4.1.2). בחר y מ L1y = "343" ל L2y = "393". ראה איור 10 ג .
הערה: בשל השינוי בשלב 5.2), הנתונים יכולים להיותלאחזר מיד, אבל תופעות לוואי להתרחש כי המדגם הוא רק מואר חלקית. לכן, לא להעריך את תחומי קצה של דפוסי. אם הרעש עדיין גבוה מדי, גודל y יכול להיות מוגברת. - הגדר את הפרמטרים הניסוייים עבור מצלמת ה- IR על ידי מילוי השדות הבאים: FrameRate כ- "40" Hz, תדר כמו "0.125" Hz, מהירות v "0.05" mm / s ומיקום ההתחלה xStart כ- "-5" mm ( cf. איור 10 ג ). הגדר את הפרמטרים לעיבוד נתונים לאחר מכן: "Fit Degree" = "7", "Smoothing" = "20" ו- "Hilbert" = "500" כמו באיור 10 ג .
הערה: הנתונים שחולצו בקו ההדלדלה ממוצעים גיאומטרית. לאחר מכן, את טווח הטמפרטורה לסירוגין Δ T (ראה איור 11 א, ב ) הוא אוחזר על ידי ביצוע התאמה פולינומית (Fit תואר). האות המתקבל מוחלק על ידי מסנן ממוצע נע (החלקה).לבסוף, שינוי הילברט מוחל כדי לאחזר את משרעת מיידית. עוד מסנן ממוצע נע (Hilbert) מוחל על מנת לצמצם אדוות שיורית. באמצעות מידע על המינימום משרעת, את המיקום של פגם מוסתרים מתקבל. - לחץ על "הערכת" כדי לבצע את ניתוח הנתונים. קרא את המיקום המחושב של הפגם מהשדה "CrackPosition [mm]", מצב הפגם מוצג בחלון איור 10d .
- הגדר את קו האזילה בשתי נקודות L1 ו L2 על ידי מילוי השדות L1x = Lx2 = "512" פיקסל כפי שהוא כבר נבחר בשלב 4.1.2). בחר y מ L1y = "343" ל L2y = "393". ראה איור 10 ג .

איור 3: צילום של תוכנית הניסוי עם הנתיב האופטי מסומן (קו אדום). לייזר סיבי הר מחובר הסיבים של לייזר דיודה. הקורה מותאמת על ידי הטלסקופ לקוטר הכניסה של PDK. לפני הכניסה PDK, הקורה מחולקת על ידי sampler קרן ו פיקוח על ידי מד צריכת החשמל. בתוך PDK, קרן הוא homogenized אNd צפוי ל DMD. PDM, הנשלט על ידי תוכנת הבקרה LPPT, פרויקטים דפוסי תאורה למדגם. האור המוקרן הוא photothermally המרה ומחמם את המדגם. הטמפרטורה נמדדת על ידי מצלמה אינפרא אדום באמצעות קרינה תרמית (קו כתום) הנפלט משטח המדגם. המדגם עצמו ממוקם בשלב התרגום הליניארי. אנא לחץ כאן כדי להציג גרסה גדולה יותר של דמות זו.

איור 4: רצף תמונות המציג את ההתאמה של ההגדרה הניסויית. ( א ) תצוגה ראשונית של תוכנית הניסוי מציגה סקירה כללית. ( ב ) המערך של הטלסקופ: הכוונת משמשת למרכז העדשה לציר האופטי של קרן הלייזר. ( ג ) יישור האלמנטים האופטיים: תושבת מערכת ברD לספסל אופטי משמש ליישר את הקורה האופטית יחסית לספסל. גובה איריס קבוע משמש כדי לשמור את הקורה במקביל לספסל. ( ד ) צילום של תצוגת הצד של נקודת הצימוד בין המקרן לבין הקורה. הכוונת משמשת ליישר את המקרן לקורה. ) ה (קביעת שידור מערכת המקרן: מד צריכת החשמל משמש למדידת הספק האופטי לפני המקרן ואחריו. ) ו (קביעת פרופיל הקורה: מסנול ומסנן ND1 מותקנים לדיודה אשר מועברת דרך שני שלבים ליניאריים באמצעות התמונה המוקרנת. המקרן חייב להיות מוגדר כדי להקרין תמונה לבנה. ( ז ) מיקום של מצלמת אינפרא אדום למדגם דרך המראה זהב: המדגם צריך להיות ממוקם במישור התמונה של המקרן. על מנת לשלוט בצפיפות הספק, ניתן להשתמש באובייקטיבי ובעדשות נוספות. ( ח ) החלטהשל קנה המידה בין התמונה המוקרנת, תמונת המצלמה IR ואת אורך בפועל של המדגם. אנא לחץ כאן כדי להציג גרסה גדולה יותר של דמות זו.

איור 5: צילומי מסך של תוכנות. ( א ) צילום מסך של תוכנת בקרת לייזר LPPT. ( ב ) תוכנת שליטה PDK: שלבים i.1 ל i.3 להראות כיצד להגדיר את PDK כמקרן רגיל. אנא לחץ כאן כדי להציג גרסה גדולה יותר של דמות זו.

איור 6: תיקון פרופיל הקורה הלא-הומוגנית. ( א ) קרן פרופיל של התמונה הלבנה המוקרנת (תאורה מלאה) נלקחה על ידי א דיודת צילום אשר הועברה דרך הפרופיל. הנתונים מראים פרופיל קרן אינומוגני עם פסגה בולטת באמצע. ( ב ) פרופיל הקו החוצה המקביל לקו האדום ב- a). ( ג ) תמונה תיקון אשר על SLM עם התמונה הלבנה המוקרנת על מנת להפחית את רמת inhomogeneity. ( ד ) פרופיל הקו המקביל של הקו האדום של c). ( ה ) פרופיל קרן שנוצר לאחר תיקון המציג פרופיל קרוב יותר לפרופיל של כובע עליון. ( ו ) פרופיל הקו המקביל של הקו האדום בקו האדום). ( ז ) פרופיל תאורה של שני דפוסים מתוקנים. הדפוסים יהיו מאופננים עם אותו תדר ומשרעת, אך עם שלבי התנגדות יוצרים אזור של הפרעה הרסנית בין הדפוסים. ( ח ) פרופיל הקו המקביל של הקו האדום ב- g). "לחץ כאן כדי להציג גרסה גדולה יותר של דמות זו." Target = "_ blank"

איור 7: הכנת דוגמאות. ( א ) צילום של משטח המדגם מראה גוש של פלדה מבנית מצופה שחור St37 (20 מ"מ x 0.5 מ"מ x 15 מ"מ). ( ב ) ציור שקוף CAD של פגמים מתחת לפני השטח. הפגמים ממוקמים 40 מ"מ מהצד הימני. ( C ) בצד תצוגות של דגימות המראים את הפגמים אידיאליזציה במעמקים שונים מתחת לפני השטח (בצד 1 = 0.25 מ"מ, בצד 2 = 0.5 מ"מ, בצד 3 = 0.7 מ"מ, בצד 4 = 1.25 מ"מ). הצדדים המדגם הם uncoated על מנת להפחית את הפסדי החום. המדגם השני (לא מוצג) יש פגמים מתחת לפני השטח שלה: בצד 1 = 1 מ"מ, בצד 2 = 1.5 מ"מ, בצד 3 = 1.75 מ"מ, בצד 4 = 2 מ"מ.= "_ ריק"> אנא לחץ כאן כדי להציג גרסה גדולה יותר של דמות זו.

איור 8: צילומי מסך של תוכנת בקרת המצלמה IR. צעדים i.1 ל i.5 להראות כיצד להגדיר את המצלמה IR לרכישת נתונים. ( א ) צילום מסך של חלונית "מצלמה": מצלמת ה- IR יכולה להיות מחוברת למחשב מצלמת ה- IR באמצעות הלחצן "התחבר". את לוח הבקרה "מרחוק" (b) ואת לוח הרכישה (d & e) ניתן להגיע מכאן. יתר על כן, המדידה ניתן להתחיל באמצעות כפתור "שיא". ( ב ) צילום מסך של הלוח "רכישה": המצלמה IR צריך להיות מוגדר באמצעות "Ext / Sync" כדי ללכוד מסגרת אם הוא מקבל 5 V TTL ההדק. ( ג ) צילום מסך של לוח "מדידה": טווח התצוגה של הנתונים יכול להיות מותאם על ידי "בחירה" כפתור. כלי נקודה וקומשמשים לכייל את תמונת המצלמה IR לקואורדינטות בעולם האמיתי. ( ד ) צילום מסך של המצלמה IR שליטה מרחוק "כיולים" פאנל. יש לבחור טווח מדידה קטן (-10 עד 60 מעלות צלזיוס) על מנת להשיג רגישות גבוהה. ( ה ) מצלמת IR שלט רחוק: "Process-IO", "IN1" ו- "IN2" חייבים להיות מופעלים כדי להפעיל את מצלמת ה- IR. אנא לחץ כאן כדי להציג גרסה גדולה יותר של דמות זו.

איור 9: צילומי מסך של תוכנת הבקרה LPPT. זרימת העבודה עבור אינטראקציות משתמש עם התוכנה מסומנת כצעדים i.1 עד i.14. ( א ) צילום מסך של הפנל הראשי LPPT; "מוּפעָל?" הוא סוג בוליאני ומפעיל את הבמה אם נכון. "תחילה" ו"אנדפוסי"Tion "הם פרמטרי הנסיעה של השלב בממ" .מ השדה "מהירות" מוגדר ב - mm / s כפתור "Start Measurement" מתחיל את המדידות, פותח את תיבת הדו - שיח המוצגת בחלונית (b) ומפסיק את המדידה אם היא שגויה. ( ב ) צילום מסך של ממשק המשתמש המשמש ליצירת הדפוסים המוקרנים למדגם, צבע נבחר לייצג שטח של פיקסלים, האזור נבחר על ידי ציור מלבנים לתמונה, אם לוחצים על הלחצן " הפאנל המוצג בחלונית (c) יצוץ כדי להגדיר את המאפיינים של האזור.לאחר הגדרת כל האזורים, כפתור "מסגרות calc" יחשב קבוצה של תמונות. "תיקון עומס" תספק תיבת דו שיח לטעון את התיקון כדי למנוע פרופיל קרן חד-כיווני, כפתור "Start" יתחיל את המדידה ( ג ) תמונת מסך של ממשק המשתמש המשמש לקביעת המאפיינים של תבנית אחת: המסגרת העליונה מציגה סוג אות (גל סינוס), משמרת פאזהבמעלות ובתדירות Hz. המסגרת התחתונה מציגה מסגרות לכל תקופה, משרעת בין 1 ל 127 ומתח לייזר (0 V עד 10 V = 0 W עד 500 W). מסגרות לכל תקופה הוא הערך המייצג כמה דק תקופה הוא discretized. לאחר כפתור "הבא" (עוד) הוא דחף, תיבת דו שיח קופץ מעלה ומבקש קצב מסגרת המצלמה ב Hz ו מסגרת מהירות מיתוג ב הרץ. אנא לחץ כאן כדי להציג גרסה גדולה יותר של דמות זו.

איור 10: צילומי מסך של תוכנת עיבוד שלאחר LPPT. ( א ) לטעון ולהמיר את הפורמט יליד IR בפורמט המצלמה. ( ב ) לשנות את המסגרת מסגרת למקרנים לתאם את המערכת באמצעות נקודות המרה P1x ל P4y. ( ג ) L1x ל L2y מייצגים את הקואורדינטות פיקסל של הקו המוערך. &# ";" X "," xxart "ו" תדירות "הם פרמטרים ניסיוניים." V "הוא מהירות מ"מ / s," xStart "את המיקום ההתחלתי של הבמה מ"מ," FrameRate "ו" תדר "Fit Degree", "Smoothing" ו- "Hilbert" הם פרמטרים של הערכה, Fit Degree מייצגת את מידת ההתאמה הפולינומית, "החלקה" מייצגת את מספר האלמנטים למסנן ממוצע נע ששימש להפחתת הרעש את הפרמטר "Hilbert" משמש כדי לקבוע את רמת החלקה כדי למצוא את המינימום של עקומה. ( ד ) צילום מסך של התוצאה מראה את מיקום סדק כמו קו מנוקד אנכי.לחץ כאן כדי להציג גרסה גדולה יותר של דמות זו.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
בעקבות הפרוטוקול, בצד 1 של מדגם פלדה עם פגם מתחת לפני השטח בעומק של 0.25 מ"מ נבחרה לייצר תוצאות נציג. הפגם הוצב בתחילה במרכזו של השטח המואר. המדגם הועבר מ -5 מ"מ ל -5 מ"מ דרך השלב הליניארי במהירות של 0.05 מ"מ לשנייה. באמצעות פרמטרים אלה, איור 11 א מציג את נתוני הסריקה לאחר חילוץ אותם משורת הניקוז. בשלב זה, את ההצלחה של הניסוי ניתן להעריך, כמו הנתונים הגולמיים זמין תוכנת בקרת המצלמה IR כתצוגה מקדימה (אופציונלי: השתמש בכלי קו כדי להציג את הנתונים, ראה איור 8 , שלב i.4) . לאחר עיבוד נוסף שלאחר האות, איור 11b מראה את המיקום פגם המינימלי של עקומת Hilbert (כחול) ב 0.3 מ"מ.
כדי לאמת את הניסוי, עקומת צריך hAve את המאפיינים הבאים: זה צריך להיות סימטרי, יש מינימום בולט במישור הסימטריה ושני מקסימום שווה לשמאל ולימין. מקסימום להתעורר בגלל זרימת החום מאחד של מקורות הקו שולט על פני השני בגלל הצטברות של חום על הפגם. זה נכון במיוחד כאשר הפגם ממוקם קרוב למישור הסימטריה. הפגם יוצר מחסום עבור זרימת החום כדי שנוכל לראות את זרימת החום של המקור השולט ואת השתקפותו מן הפגם. אם הפגם ממוקם באופן סימטרי באמצע, זרימת החום מתפצלת באופן שווה, וכתוצאה מכך מינימום 1 .
האפקט של מהירות הסריקה מוצג באיור 11 ג . כאן, מהירות הסריקה הוכפל ל 0.1 מ"מ / s כדי להעריך את אותו פגם. לפני כן, המדגם הועבר מעט על הבמה כדי לקבל מיקום יחסי אחר. עמדת הפגם נקבעהכדי להיות מ"מ. רמת התארכות היה דומה לנתונים שמוצג באיור 11a , הוכחת שחזור טוב של הניסוי, אבל עם תנודות פחות. מאז התארכות מקסימלית בקורלציה עם עומק הפגם, מידע על המיקום והעומק ניתן לשמור גם כן 1 .
איור 11d מציג מערך נתונים אופטימלי. הפגם היה 1 מ"מ מתחת לפני השטח, אשר כמעט על גבול האיתור של אורך דיפוזיה זה ואת הכוח האופטי זמין. למרות שמיקומו של הפגם עדיין יכול להיקבע, אי-הוודאות של המדידה גדולה יותר, משום שמיקום תנודת האפס כבר מושפע מרעש. מהתנהגות זו, אנו יכולים להסיק כי הסימנים הברורים ביותר לכישלון של הניסוי לזיהוי פגמים הם אם קו הדילול נעלם לחלוטין או אם יש התנהגות א-סימטרית חזקה. זה יכול להיות בגלל follo) I (הרזולוציה המרחבית של מצלמת ה - IR איננה מספקת וקו הידלדלות אינו ניתן לפתרון נכון,) ii (רעש המצלמה גבוה מדי בהשוואה לעליית הטמפרטורה,) iii (דפוס התאורה הוא (Iv) מהירות השלב הנבחרת גבוהה מדי, בהשוואה לתדר האפנון של תבנית התאורה, וכן (v) אורך הדיפוזיה התרמית (באמצעות תדר האפנון) אינו מותאם לפגם עוֹמֶק.

איור 11: מערך נתונים מייצג בניסויים לאיתור פגמים מתחת לפני הקרקע. ( א ) נציג נתונים ניסיוניים מן המדגם St37, בצד 1 עם פגם בעומק של 0.25 מ"מ. השורה השחורה מציגה מידע טמפרטורה לאורך זמן (ציר עליון). על ידי תרגום הבמה במהירות v = 0.05 mm / s, המיקום הוא(ציר תחתון). עקומת אדום מראה התאמה פולינומית (7 th תואר) השתמשו כדי לקבל את רכיב הטמפרטורה לסירוגין. קו אדום מקווקו מייצג את המיקום של פגם מתחת לפני השטח. ( ב ) עקומה שחורה מראה את תרשים הטמפרטורה לסירוגין המתקבל על ידי הפחתת התאמה פולינומית מנתוני הטמפרטורה של הפאנל (א). עקומת כחול הושג על ידי יישום הילברט טרנספורמציה לעקומה השחורה וממוצע. ( ג ) נציג נתונים ניסיוניים של אותו צד על פני טווח של -7 מ"מ ל 3 מ"מ במהירות הבמה של 0.1 מ"מ / s. התדר הוא חצוי אבל הארכה דומה פאנל (א). ( ד ) נתונים ניסיוניים אופטימליים שנרכשו כאשר הפגם מתחת לפני השטח היה בעומק של 1 מ"מ. אנא לחץ כאן כדי להציג גרסה גדולה יותר של דמות זו.
Subscription Required. Please recommend JoVE to your librarian.
Discussion
הפרוטוקול המוצג מתאר כיצד לאתר פגמים מלאכותיים מתחת לפני השטח מונחים בניצב אל פני השטח. הרעיון המרכזי של השיטה הוא ליצור התערבות שדות גל תרמי אשר אינטראקציה עם פגם מתחת לפני השטח. השלבים החשובים ביותר הם: (i) לשלב SLM עם לייזר דיודה על מנת ליצור שתי דפוסי תאורה מתחלפים באנרגיה גבוהה על פני המדגם; דפוסים אלה מומרים photothermally לשדות גל תרמית קוהרנטית, (ii) לתת להם להתערב באופן הרסני תוך אינטראקציה עם פגם תת קרקעית, (iii) כדי לאתר פגמים אלה משטח סריקה של הטמפרטורה הדינמית של משטח המדגם באמצעות הדמיה תרמית מצלמת IR. מאחר שרק התנודות היחסיות של הטמפרטורה סביב ערך משתנה משתנה באיטיות ולא ערך הטמפרטורה המוחלט נחוצה, גישה זו רגישה ביותר לליקויים נסתרים 1 .
אחד הצעדים הקריטיים ביותרבתוך הפרוטוקול היא להקים הומוגניות מספיק של פרופיל קרן התאורה בעת שימוש במקור לייזר SLM מצמידים חימום מובנה (עיין שלב 1.10). הלייזר דיודה מציעה קרינה גבוהה אבל יש להאכיל לתוך המקרן המכיל את SLM עם קוטר קרן הנכון כיווניות. בשל חוסר התאמה גיאומטרית וספקטרלית בלתי נמנעת עם הנתיב האופטי הקנייני בתוך המקרן, התמונה שנוצרת על המדגם מעוותת. לכן, תיקון מספרי של ערכי עוצמת התמונה השולטים על התמונה המוקרנת מתבצע עם התייחסות למדידת פרופיל הקורה. צעד קריטי שני לניסוי מוצלח הוא להשיג רזולוציה מרחבית גבוהה של התמונה IR (עיין בשלבים 3.3.7- 3.3.8). אזור דלדול צריך להיות מספיק מרחבי נפתרה, אחרת לא דלדול ולכן שום עמדה פגם ניתן למדוד.
טבעו של הגלים התרמיים החלים הוא דמויי-דיפוזיהתהליך המוביל ניחות חזקה של משרעת שלהם על כמה מילימטרים בלבד. אנו פוגשים הגבלה פיזית מהותית זו באמצעות לייזר דיודה בעל הספק גבוה כמקור אור. צוואר הבקבוק של ההתקנה הניסויית הנוכחית היא מגבלת מתח תרמי של SLM 21 , כלומר רק חלק קטן של כוח לייזר זמין ניתן להחיל. הפתרון הנוכחי שלנו הוא מעיל את משטח המדגם עם ציפוי גרפיט שחור. בעתיד, אנו מצפים setups עם רגישות גבוהה יותר באמצעות מנועי אור אופטימיזציה או אפילו מערכים לייזר ישיר Switchable, כגון כוח גבוהה אנכית חלל משטח פולטי לייזר (VCSEL) מערכים 22 .
ההבדל העיקרי בין שיטה זו לבין ההדמיה התרמית הקיימת בבדיקות לא הרסניות הוא העובדה שאנו משתמשים בהפרעה הרסנית של שדות גל תרמי קוהרנטיים לחלוטין; אשר אפשרי רק לאחר שליטה על משרעת ואת השלב של קבוצה של לי בודדיםמקורות באופן דטרמיניסטי. בשיטות התרמוגרפיות הקיימות, נעשה שימוש במקור אור מתמטי, הנשלט בתחום הזמן או בנקודת לייזר ממוקדת אחת, הנשלטת במרחב המרחבי. היתרון העיקרי של הגישה שלנו הוא רגישות גבוהה לליקויים שוכב בניצב למשטח המדגם.
עד כה, רק שני מקורות אור בודדים נוצרו. עם לייזר SLM מצמידים אנו יכולים, באופן עקרוני, ליצור ולשלוט עד מיליון מקורות אור בודדים - מיליון מקורות חום - על פני השטח המדגם. ברור כי גישה זו פותחת את האפשרויות של גל תרמי שרירותי בעיצוב לטווח ארוך ולהעביר טכניקות מן אולטרסאונד או מכ"ם לתחום של תרמוגרפיה פעילה, בתוך גבולות פיזיים. ברגע את האתגר irradiance כאמור לעיל ( כלומר כוח אופטי לכל פיקסל צפוי) נפתרה באופן משביע רצון, אפילו פגמים קטנים יותר הממוקם עמוק מתחת לפני השטח צריך להיות לזיהוי. עד כה,פלדה נבדק, אבל השיטה היא מאוד מבטיח במיוחד עבור פלסטיק, חומר מורכב, וחומרים רגישים אחרים, בשל הלחץ התרמי נמוך להחיל.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
למחברים אין מה לחשוף.
Acknowledgments
ברצוננו להודות לטאארנה סטודמונד ולהאגן ונדלר על שצילמנו את מערך הניסוי וכמו הכינו אותם לפרסום דמות. יתר על כן, ברצוננו להודות אן הילדברנדט להכנת המדגם ו Sreedhar Unnikrishnakurup, אלכסנדר בטיג ופליקס Fritzsche לקריאה הוכחה.
Materials
| Name | Company | Catalog Number | Comments |
| 500 W diode laser system, 940 nm | Laserline | LDM 500 - 20 | Pilot laser class 2 @ 650 nm, diode laser is a class 4 laser system --> special laboratory needed |
| Laser control box | Laserline | Laser control box LDM | Add on to the laser system, used to switch electronically, laser threshold, shutter, laser on 0 V..5 V TTL |
| Control box scanner | Laserline | Add on to the laser system, used to adjust the optical output power via analog signal from 0 V..10 V | |
| Fiber Laser Mount 2", f = 80 mm | Laserline | Add on to the laser system | |
| Multifunction Data Aquisition (DAQ) Device + BNC Terminal | National Instruments | NI-USB 6251 | The DAQ card is used to trigger the IR camera, the DLP Light Commander 5500, control Laser and diode PDA 36A |
| Standard - PC | Control PC - graphic card for two screens, at least 4 x USB, Windows based | ||
| BNC cabel | Standard cable | ||
| HDMI cable | Standard cable | ||
| Micro USB to USB cable | Standard cable | ||
| LabVIEW 2013 SP1 Development System | National Instruments | Development environment for device control | |
| LPPT control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT intensity software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| LPPT laser control software | BAM | part of the LPPT software package by LabVIEW 2013 SP1 | |
| Matlab 2016b | MathWorks | Postprocessing of the measurement data | |
| LPPT postprocessing software | BAM | Postprocessing of the measurement data | |
| IR camera control PC | InfraTec | Control PC is supplied by camera distributor | |
| IR camera control software | InfraTec | Irbis 3 Professional | |
| InfraTec SDK | InfraTec | Dynamic Link Library as interface between the native data aquisition format of Infratec and Matlab | |
| IR camera | InfraTec | Image IR 8300 | 640 x 512, cooled InSb detector, wavelength 2 µm..5.7 µm, noise = 20 mK + accessories (LAN cable, Digital in/out cable, space ring, power supply, case) |
| Tripod | Manfrotto | 161MK2B | |
| IR camera mount | Manfrotto | 405 | |
| Projector development kit (PDK) for digital light processing (DLP) technology (DLP Light Commander 5500) | Logic PD | DLP-LC-DLP5500-10R | DLP5500 Digital Micromirror Device from Texas Instruments included , light engine and case need to be disassembed |
| PDK control software | Logic PD | Included when delivered, DLP Light Commander control software | |
| Mechanical platform for the PDK | BAM | Self made (140 x 230 x 420) mm3 | |
| Power meter control unit | Ophir | Vega | USB Interface |
| 30 W power meter head | Ophir | 30(150)A-LP1-18 | Power meter head to determine Transmission of the projector system |
| 500 W power meter head | Ophir | FL500A | Power meter for process supervision |
| Motion controller | Newport | ESP301 | with USB Interface |
| Translation stage | Newport | M-ILS200CC | Connected to ESP301 |
| Photodiode with amplifier | Thorlabs | PDA 36A-EC | 1" mount |
| Reflective filter ND1 | Thorlabs | ND10A | to be mounted to the PDA 36A |
| Pinhole 1" | Thorlabs | P1000S | to be mounted to the PDA 36A |
| Optical aluminium breadboard | Thorlabs | MB60120/M | (1,200 mm x 900 mm) base |
| Plano Convex Lens f = 200 mm | Thorlabs | LA1979-B | Coated for IR, first telescope lens |
| Plano Convex Lens f = 75 mm | Thorlabs | LA1145-B | Coated for IR, second telescope lens |
| xy-translation stage | Newport | M401 | Used for adjusting the telecope |
| Beamsampler | Thorlabs | BSF20-B | Splits the optical output, used to reduce the optical input for the projector system |
| Mirror | Thorlabs | BB2-E03 | Mirror for coupling the beam to the DLP Light Commander |
| Heavy duty lab jack | Thorlabs | L490 | Used for the fiber mount and on top of the linear stage to position the sample (2x) |
| PDK-objective | Nikon | Nikon AF Nikkor 50 mm 1:1:8:D | Objective for DLP Light Commander, 50 mm |
| Plano Convex Lens f = 100 mm | Thorlabs | LA1050 -B | Lens is attached to the Nikon Objective |
| Bi-Convex Lens f = 60 mm | Thorlabs | LB1723 -B | Lens to be attached to the Nikon objective in order to determine the optical transmission with the 30 W measurement head |
| Square protected gold mirror | Thorlabs | PFSQ20-03-M01 | |
| High power IR sensor card | Newport | F-IRC-HP-M | Sensor card to check the optical pathway |
| 2" crosshairs | BAM | Self-made | |
| 1" crosshairs | BAM | Self-made | |
| Bullseye level | Thorlabs | LCL01 | |
| Translation Stage | Newport | M-UMR8.25 | Used for measuring the beam profile |
| Micrometer screw | Newport | DM17-25 | Used with translation stage M-UMR8.25 |
| Mounted Zero Aperture Iris | Thorlabs | ID75Z/M | used to check the optical pathway |
| Bases and Post Holders Essentials Kit, Metric and Universal Components | Thorlabs | ESK01/M | Basis |
| Posts & Accessories Essentials Kit, Metric and Universal Components | Thorlabs | ESK03/M | |
| M6 Cap Screw and Hardware Kit | Thorlabs | HW-KIT2/M | |
| Construction Rails | Thorlabs | XE25L700/M | |
| 1" Construction Cube | Thorlabs | RM1G | Used to mount construction rails |
| Electrical discharge machining | Sodick | AG60L | www.sodick.de |
| St37 block of steel (100 x 100 x 40) mm3 |
BAM | self-made, hidden defect with remaining wall thicknesses of 0.25 mm, 0.5 mm, 0.70 mm, 1.25 mm (shown in Figure 5) | |
| St37 block of steel (100 x 100 x 40) mm |
BAM | self-made, hidden defect with remaining wall thicknesses of 1 mm, 1.5 mm, 1.75 mm, 2 mm (shown in Figure 5) | |
| Graphite spray | CRC Industries Europe NV | GRAPHIT 33 | Ref. 20760, 200 mL aerosol (Kontakt-Chemie) |
| Protective tape | Tesa | tesakrepp 4348 | used to protect the hidden defects while coating |
References
- Thiel, E., Kreutzbruck, M., Ziegler, M. Laser-projected photothermal thermography using thermal wave field interference for subsurface defect characterization. Appl. Phys. Lett. 109 (12), 123504 (2016).
- Ibarra-Castanedo, C., Tarpani, J. R., Maldague, X. P. V. Nondestructive testing with thermography. Eur. J. Phys. 34 (6), 91-109 (2013).
- Maldague, X. P. Introduction to NDT by active infrared thermography. Mater. Eval. 60 (9), 1060-1073 (2002).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning pulsed laser spot thermography. Ndt&E Int. 44 (2), 216-225 (2011).
- Lugin, S. Detection of hidden defects by lateral thermal flows. Ndt&E Int. 56, 48-55 (2013).
- Li, T., Almond, D. P., Rees, D. A. S. Crack imaging by scanning laser-line thermography and laser-spot thermography. Meas. Sci. Technol. 22 (3), (2011).
- Pech-May, N. W., Oleaga, A., Mendioroz, A., Salazar, A. Fast Characterization of the Width of Vertical Cracks Using Pulsed Laser Spot Infrared Thermography. Journal of Nondestructive Evaluation. 35 (2), 22 (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. SPIE 9761. Douglass, M. R., King, P. S., Lee, B. L. , Spie-Int Soc Optical Engineering. (2016).
- Thiel, E., Kreutzbruck, M., Ziegler, M. Proc. WCNDT 2016. , 6 (2016).
- Mandelis, A. Diffusion-Wave Fields: mathematical methods and Green functions. , Springer-Verlag. (2001).
- Almond, D., Patel, P. Photothermal Science and Techniques. 10, Chapman & Hall. (1996).
- Salazar, A. Energy propagation of thermal waves. Eur. J. Phys. 27 (6), 1349-1355 (2006).
- Bennett, C. A., Patty, R. R. Thermal wave interferometry: a potential application of the photoacoustic effect. Appl. Opt. 21 (1), 49-54 (1982).
- Busse, G. Stereoscopic depth analysis by thermal wave transmission for nondestructive evaluation. Appl. Phys. Lett. 42 (4), 366 (1983).
- Holtmann, N., Artzt, K., Gleiter, A., Strunk, H. P., Busse, G. Iterative improvement of Lockin-thermography results by temporal and spatial adaption of optical excitation. Qirt J. 9 (2), 167-176 (2012).
- Pribe, J. D., Thandu, S. C., Yin, Z., Kinzel, E. C. Toward DMD illuminated spatial-temporal modulated thermography. Proc. SPIE 9861. , (2016).
- Ravichandran, A. Spatial and temporal modulation of heat source using light modulator for advanced thermography. , Missouri University of Science and Technology. (2015).
- DLP 0.55 XGA Series 450 DMD. , TexasInstruments. (2015).
- Application Note - DLP System Optics. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?baseLiteratureNumber=dlpa022&keyMatch=dlpa022&tisearch=Search-EN-Everything (2010).
- DLP LightCommander Control Software - User Manual. , LogicPD. Available from: https://support.logicpd.com/ProductDownloads/LegacyProducts/DLPLightCommander.aspx?_sw_csrfToken=318b0448 (2011).
- White Paper - Laser Power Handling for DMDs. , TexasInstruments. Available from: http://www.ti.com/general/docs/lit/getliterature.tsp?literatureNumber=dlpa027&fileType=pdf (2012).
- Moench, H., et al. High-power VCSEL systems and applications. Proc. SPIE 9348. , (2015).
