

Summary
Burada makromoleküler X-ışını kristalografisi yapı belirleme kullanım için lipidik mesophases içinde zar proteinlerinin yüksek verimli kristalleşme için bir robot bir yaklaşım tarif edilmektedir. Yöntemine ayrılmaz viskoz ve yapışkan protein yüklü Mezofaz taşıma kapasitesine sahip üç robotlar tanıtıldı.
Abstract
Membran proteinlerinin yapı-fonksiyon çalışmaları büyük ölçüde makromoleküler X-ışını kristalografisi (MX) aracılığıyla sağlanır türü mevcut yüksek çözünürlüklü 3-D yapılar sahip yararlanacak. MX temel bir madde ideal kırınımı kaliteli kristaller sabit bir kaynağı olduğunu. Mezo ya da zar proteinleri kristalize edilmesine ilişkin bir lipidik kübik faz (LCP) yöntemi de membran proteinleri kristalizasyonuna yönelik çok sayıda yöntem biridir. Bu kristallerin büyümesi de bir bicontinuous mezofaz kullanır. Bir yöntem olarak, geç bazı muhteşem başarılar olmuştur ve şimdi kullanarak ilgilenen birçok araştırma grupları ile çok dikkat çekti. Yöntemi ile ilişkili sorunlardan biri barındırma Mezofaz kalın bir diş macunu andıran, son derece ağdalı ve yapışkan olmasıdır. Böylece, kristalizasyon kuyulara küçük hacimli bir tekrarlanabilir bir şekilde elle dağıtma beceri, sabır ve elinizi sabit tutmanız gerekir. Ju yapmak için bir protokolMembran Fonksiyonel ve Yapısal Biyoloji (MS & FB) Grup 1-3 geliştirilmiştir st. Yöntemini açıklayan Jüpiter Video yazılar mevcuttur 1,4 bulunmaktadır.
Mezo çalışmalarda kurmak için manuel bir yaklaşımla bu tür kristal optimizasyonu ve türevlendirme gibi özel uygulamalar ile belirgin avantajları vardır. Ancak düşük bir verim yöntemi olmaktan muzdarip yok. Burada, robotik mezo kristallendirme çalışmalarında gerçekleştirmek için bir protokol göstermektedir. Bir robot hız, doğruluk, kesinlik, minyatür ve indirgeyici bir ortamda ya da düşük veya yüksek sıcaklıklarda, örneğin karanlık gibi düşmanca koşullar olarak kabul edilebilir ne altında uzun süre sürekli çalışabilecek olmanın avantajlarını sunmaktadır. Doğru kullanıldığında mezo robot, bir ölçüde de yavaş adımlardan biridir kristalizasyon kolaylaştırarak membran protein yapısını verimlilik ve işlevi araştırma artırabilirgenel yapısının belirlenmesi boru hattı.
Bu video yazıda, mezo crystallogenesis içinde ayrılmaz viskoz ve yapışkan Mezofaz başarabilenin üç piyasada mevcut robotların kullanımını göstermektedir. İlk robot MS & FB Grubu 5,6 geliştirilmiştir. Diğer iki son zamanlarda kullanılabilir hale gelmiştir ve tamlığı için buraya dahildir.
Bu makalede anlatılan protokol bir genel görünüşü Şekil 1'de gösterilmiştir. Bütün manipulasyonlar oda sıcaklığında (yaklaşık 20 ° C) koşullar altında yapıldı.
Protocol
1. Kristalleşme Plaka hazırlama
Robotik bir kristalleşme deneme yapmak için ayarlama referans 2 ayrıntılı olarak açıklanan cam kristalleşme sandviç plaka (Şekil 2), ve temel levha hazırlanması ile başlar. Taban plakası ilk Silanlanmış olmalı ve kuyuları oluşturur delikli çift sopa boşluk, plaka uygulanması gerekir. Bunun için gerekli malzeme ve sarf malzemeleri Malzeme altında maddeler halinde sıralanır.
- Bir kağıt havlu üzerine plaka yerleştirin, çözüm silanizing birkaç damla uygulayın ve bir kağıt mendille plaka yüzeyi üzerinde eşit biçimde dağıtın.
- Su bir behere plaka daldırarak aşırı silanizing çözüm çıkarın.
- Beher plaka çıkarın, kuru bir kağıt havlu, Silanlanmış tarafta o kadar yerleştirin ve kağıt havlu ile hafifçe silerek kendi yüzeyidir kurulayın.
- Delikli, çift-çubuk boşluk üzerinde koruyucu kapak soyunve cam levha kuru, Silanlanmış yüzeye, spacer, yapışkan tarafı aşağı geçerlidir. Boşluk sol üst köşesinde ve spacer bitişik iki ve çakışık plaka ile taban plakası üzerine doğru şekilde yerleştiğinden emin olun.
- Taban plakası üzerinde boşluk düzleştirmek için ve aralarında sıkı bir mühür oluşturmak için bir rulo veya brayer kullanın.
Önceden birleştirilmiş plakaları (; MD11-55-100, moleküler boyutları; ve LCP96T-UVP70U, Swissci HR3-151, Hampton Research), ticari olarak mevcuttur. Maliyet nedenlerden dolayı, yukarıda protokolü takip kendi plakaları monte tercih.
2. Mezo Robot 1'de
Bu video madde olarak gösterilmesi için mezo robot içinde ilk olarak şu anda MS & FB grubu (Şekil 3) de kullanılan biridir. Robotun tüm ayrıntıları Malzemeler altında ve Referans 5. bölümünde bulunabilir. Malzeme ve equipment Malzeme altında maddeler halinde robot kullanarak bir kristalizasyon deneme kurmak için gereklidir.
- Robotun güvertede Bölüm 1 'de hazırlanan boşluk ile taban plakası yerleştirin. Bu taban plakası uyum amaçları için iyi bir pozisyon ile işaretlenmiş kendi platformuna sahiptir. Plaka tanımlama amaçlı etiketlenmiş olmalıdır.
- Kristalleşme plakasının yanına robot güvertesinde kendi platformunda 96-çöktürücü blok sabitleyin.
- Plastik sızdırmazlık kapağı soyulması tarafından dikkatle blok açın.
- Nemlendirici açın ve robot güverte taban plakası üzerinde ve genelinde nemli hava akışı yönlendirmek. Nemlendirici çökelti çözeltisi buharlaşmasını azaltmak için ve kristalleşme plaka 5 üzerinde tekrarlanabilirliğini artırmak için gösterilmiştir. Bu Mezofaz ve dağıtım başlamadan hemen önce, aksi takdirde ortam bağıl nem düşük olduğunda alanı önceden nemlendirmek veya önceden açık olarak set-up açılabilir.
- Üreticinin yönergelerini takip robotu başlatılamıyor. Tam prosedürler zamanla değişecektir çünkü Enstrüman özgü talimatlar burada ayrıntılı olarak tarif edilmeyecektir. Esasen, ne başlatılıyor sırasında olur robot kolu dağıtım Mezofaz üç ortogonal yönde X, Y ve Z yönünde referans konumları ile sağlanan olmasıdır
- Robotun Kol 1 (Şekil 3), iğne dağıtım ile tam bir Hamilton şırınga protein yüklü Mezofaz takın. Şırınga içine yüklemek için Mezofaz ve nasıl hazırlamak için nasıl tam ayrıntıları Kaynaklar 3,7-10 tarif edilmiştir.
- Kristalizasyon taban plakası üzerinde boşluk gelen üst koruyucu kapağı çıkarın ve taban plakası platformda fiducials ile plaka üzerinde kuyular hizalayın. Not, bu video amacıyla, koruyucu kapak hizalama basamağı sırasında Görüntüleyici yardımcı olmak üzere yer bırakılmıştır.
- Dozaj syring bir iğne ucu hizalamakristalleşme plaka (O A1) sol köşesinde iyi üstteki alt sahip e. Bu iğne ucu da alt söz konusu ne kadar yakın izlerken dağıtma kolunun yükseklik ya da Z-koordinat ayarlayarak göz tarafından yapılır. Ucu sadece kuyunun dibinde dokunuyor Bu dağıtım kolunun yüksekliğini ayarlayarak çok hafif iken platformda yan yana plaka taşıyarak karar olabilir.
- Bilgisayara uç temas plakası dağıtma kolunun Z-koordinat girin. Dağıtıcı 80 mikrometre bu referans baz plakasının yüzeyine karşılık gelen Z-pozisyonundan iğne ucu ile yer almak üzere programlanmıştır.
- Göz de A1 merkezinde iğne ucu ile yerleştirin. Kontrol bilgisayarı referans X, ucu merkezli dağıtım kol Y koordinatı saklayın. Bu koordinat levha üzerinde kalan kuyu merkez tanımlamak için kullanılır.
- Prtaze mezofaz sağlamak için robot bilgisayarda uygun komutu kullanılarak ime şırınga ve iğne dağıtıcı birinci ve bunu takip eden kuyular mezofaz bunların tamamlayıcı almasını doldurur. Bir doku ile iğnenin ucunda çekilmiş Mezofaz siliniz.
- Robotun Kol 2 çöktürücü dağıtım ipuçları yıkanır ve çöktürücü blok çözümler aspire hazırlanan adımları kızarma yuvarlak başlatmak için Run Robot (X-AP) programını başlatın.
- Etkinleştir hareket çöktürücü çözümleri (genellikle 800 nl) izledi ilk protein yüklü Mezofaz (genellikle 50 nl), bir seferde sekiz kuyu bir sütun ile kuyu sıralı yükleme ayarlamak için robot işlevini dağıtmak. Yükleme sütunları arasında, iğnenin ucundaki bir yerleştirilen bir park konumuna mezofaz dağıtma kolu döner kurumasını ucunda mezofaz önlemek için sünger ıslattı. Dağıtım Mezofaz ve çöktürücü süreci tekrarlanırPlaka üzerinde 11 kez plaka dolana kadar. Mezofaz ve çöktürücü ile bir 96-kuyulu plakanın yükleme tamamlamak için 5 dakika sürer.
- Plaka doldurulur ve robot kollar kendi parkta konumlarına geri dönmüşlerdir bitmez, robot güverte plakasını çıkarın ve düz bir katı yüzey üzerine yerleştirin.
- Derhal, iyi kompozisyon zamana bağımlı değişiklikler en aza indirmek için bir kapak-cam plaka mühür. Bu kapak cam taban plakası ile kare hizalanmış ve kapak cam hiçbiri taban plakasının izi ötesinde olduğunu, 96 kuyu tamamen kapalı olduğundan emin olmak için önemlidir. Bir silindir veya brayer kapak camı ile boşluk arasında sıkı ve eşit bir mühür oluşturmak için kullanılır.
- Olması gerektiği gibi set up gitti emin olmak için plakasını kontrol edin. Ne bir arayan her kuyuda görünümü 'Bir tavada kızarmış yumurta' dir. Kızarmış yumurta sarısı mezofaz karşılık gelir. Yumurta ve beyaz bir çökeltici madde solutive pan kenarına iyi kristalleşme çevre uzunluğudur. İdeal olarak, üç konsantrik vardır.
- Kristal büyümesi için sıcaklık kontrollü bir depolama alanı içinde plaka yerleştirin.
- Artık plakaları kurmak isteniyorsa, robot güverte çöktürücü bloğu kaldırmak, sıkıca kapatın ve depolama içine geri koymak.
- Robotun dağıtım kolundan Mezofaz içeren şırınga çıkartıp parçalayarak, bir sonraki kullanım için hazırlık metanol ve kuru dikkatlice dağıtım iğne ve yüksük gibi parçaları, yıkayın.
3. Mezo Robot 2'de. Sivrisinek LCP
Sivrisinek LCP robot (Şekil 4) Robot 1 tarafından kullanılana benzer bir mezofaz dağıtıcı içerir. Robot 1 aksine olarak, tek kullanımlık uçları ile çökeltici madde dağıtır. Programlama yazılımı özellikle kristallenme tabak ve precipit çalışmak için araç ayarlamak için kullanılırkarınca blok ve belirli bir sırayla Mezofaz ve çöktürücü kullanıcı tanımlı birimler dağıtmak için. Bu gibi ayrıntılar üreticisi tarafından sağlanan ve burada tarif edilmeyecektir.
- Gibi Robot 1 altında ve Jüpiter madde 1712 1, içinde açıklanan iğne ile birlikte ve protein yüklü mezofaz ile doldurulmuş bir şırınga Hamilton, hazırlayın.
- Robotun dağıtım kolunda pozisyonda şırınga Kelepçe.
- Güverte kullanın X ve dağıtım şırınga iğne Y koordinatları kurmak için lazer sensörü monte. Bu mezofaz plaka üzerindeki her bir kuyucuğa merkezine doğru sürülür sağlamak için gereken önemli bir adımdır.
- Kontrol paneli üzerindeki bir düğmeye dokunarak, asal şırınga iğne Mezofaz sınırdışı. Kuyu yüklemek için robot kullanarak hazırlık bir doku ile iğne ucundan ekstrüde Mezofaz çıkarın.
- Robot nemli güvertede kristalizasyon plaka yerleştirmeden öncekapilarite tarafından yerinde plaka tutma yardımcı olmak için su ile bir kaç damla platform yüzeyi en.
- Cam taban plakası üzerinde boşluk koruyucu kapağı çıkarın ve iyi yapışma sağlamak için sıkıca platform üzerine yerleştirin. Böylece dağıtım iğne ucu ile ilgili olarak plaka kuyuları doğru konumlandırılmasını sağlayabilir 3 köşe kuyu hizalamak için platform üzerinde üç fiducials kullanın. Cihaz artık bir dağıtım döngüsü girmek için komut verilir.
- Döngüsü Mezofaz taze Mezofaz ile kuyu yüklemeye geçmeden hemen önce, küçük bir cam plaka üzerine sürülür, ikinci bir astar adımla başlar. Sonra robot ilk Mezofaz plaka üzerinde 8 kuyu dikey bir sütun ile yükler ve Mezofaz bolus üstüne çöktürücü solüsyonu dağıtmak için tek kullanımlık uçları kullanır. Bütün yuvalara dolana kadar işlem plakasının uzunluğu boyunca 11 defa tekrarlanır. Tüm süreci tamamlamak için yaklaşık 5 dakika sürer.
- Çıkarmakdolu robotun platformunda, plaka ve Robot 1 altında yukarıda tarif edilen bir kapak camı ile izole edin.
- Kristal büyümesi için bir sıcaklık kontrollü bir ortam içinde, uygun şekilde etiketlenmiş, plaka yerleştirin.
4. Mezo Robot 3'te. Gryphon LCP
Gryphon LCP robot (Şekil 5) robot 1 ve 2 için yukarıda anlatılana benzer bir mezofaz dağıtma sistemini içerir. Ne diğer iki ayıran 96 Çöktürücü çözümleri eşzamanlı reçete olmasıdır.
- Protein yüklü mezofaz hazırlayın ve robot 1 ve 2 uyarınca, yukarıda tarif edildiği gibi, dağıtma şırınga içine yükleyin ve Jüpiter madde 1712 1.
- Robotun dağıtım kolunda pozisyonda şırınga Kelepçe.
- Robotun güvertesinde çökelti çözeltisi blok ve kristalizasyon plakası yerleştirin.
- 96-ucu hea yükleyinÇöktürücü çözümleri ile d. Bir kullanıcı tanımlı gecikme süresi viskoz presipitanlar aspire kolaylaştırmak için sağlanmıştır.
- Bir dağıtım döngüsü girmek için alet komutu. Döngüsü mezofaz tamamlanması için yaklaşık 1 dakika süren bir süreç içinde 96 kuyu içine ardışık olarak dağıtılmış olması ile başlar. 96-ucu kafası sonra kristalizasyon kuyularda Mezofaz bolus üstüne kerede 96 Çöktürücü çözümler dağıtır. Tüm plaka yükleme işlemi 2 dakika içinde bitti.
- Robot platformu dolu plakasını çıkarın ve Robot 1 altında yukarıda belirtildiği gibi bir kapak-cam ile kapayın.
- Kristal büyümesi için bir sıcaklık kontrollü bir ortam içinde, uygun şekilde etiketlenmiş, plaka yerleştirin.
5. Temsilcisi Sonuçlar
Bu video makalenin amacı bir viskoz, cam toplam yüzeyi membran proteini yüklü Mezofaz ile otomatik kristallendirme çalışmalarında nasıl kurulacağını göstermek içinh 96-kristalleşme plakaları. Vurgu az manuel müdahale gerektiren uzmanlaşmış robotlar aracılığıyla otomasyonu üzerinde. Bir robot kullanıldığında Mezofaz ve çöktürücü kalmaması ve iyi içinde hem yerleştirme, hacimleri açısından Tekrarlanabilirlik ve hassasiyet, bekleniyor. Bu crystallogenesis destekleyen şartlar etkin tarama bakış açısından önemlidir. Ayrıca görüntüleme cihazları ile genellikle yapılır kristal büyümesini değerlendirmektir analiz boru hattı sonraki adım için kritik öneme sahiptir. Damla veya bolus konumu görüntüleme sürecinin anahtarı olduğu ve kuyuya bolus düzensiz ve yanlış yerleşimi genellikle düzeltmek için kullanıcı müdahalesi gerektirir ve zaman alır. Örnekleme amaçları için, uygun bir şekilde ve doğru bir biçimde yüklü levha örnekleri Şekil 6 'da gösterilmiştir.
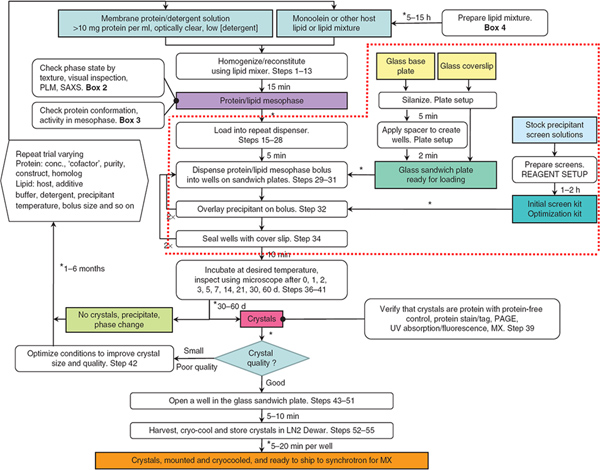
Şekil 1. Akış mezo-yetiştirilen membran protein kristalleri üretimi, hasat ve kriyo-soğutma dahil adımları özetlemektedir. Kesikli kırmızı çizgi ile çevrili Adımlar Bu Jove makalenin odak vardır. Robotlar Adımlar 29-32 yılında Mezofaz ve çöktürücü çözümleri dağıtmak için kullanılmıştır. Referans 3 Gönderen. büyük bir rakam görmek için buraya tıklayın .

Şekil 2. A tam yüklü ve mühürlü 96-cam sandviç kristalizasyon tabağı. Her iyi 50 nl kübik faz ve 1 ul çökelti çözeltisi içerir. Anlaşılır olması için, kübik faz Sudan Red ile boyanmış ve çökelti çözeltisi Metilen Blue içerir olmuştur. Referans 5 Gönderen.
_upload/4000/4000fig3.jpg "alt =" Şekil 3 "/>
Şekil 3. Mezo robotu (Robot 1). Robotun iki kolu var. Kol 1 dağıtır protein yüklü lipidik Mezofaz. Kol 2 Çöktürücü çözümler dağıtır. Dolum sırasında, 96-plaka kendisini hareketsiz robot güvertede pozisyonda sabit kalır. Iki kol Mezofaz ve çöktürücü çözümler sunmak için hareket. Referans 3 Gönderen.

Şekil 4. Sivrisinek LCP robotu (Robot 2). Robot 1, 96-kuyulu plaka ve çökelti çözeltisi blok üzerine oturduğu Sivrisinek LCP ve güverte farklı olarak, dolum esnasında yatay olarak hareket eder.

Şekil 5. Gryphon LCP Robot (robot 3). Bir sırasındakurmak, lipidik kübik faz dağıtıcı 96-plaka üzerine protein yüklü Mezofaz sunmak için hareket eder. Güverte sonra çökelti çözeltisi ucu başının altına plaka konumlandırmak için yatay çevirir. Tüm 96 Çöktürücü çözümleri aynı anda dağıtılır. Resim üreticisi (kaynaklı http://www.artrobbins.com/ ) ve etiketli.

Şekil 6.. Bir tam yüklü ve mühürlü 96-cam sandviç plaka (A) ve uygun bir şekilde kuyu (B) ve uygun olmayan şekilde (C, D), mezo robot (Robot 1) kullanılarak doldurulur. In plaka üzerinde barkod etiketi bir plaka inkübatör / görüntüleme cihazı içinde plaka izlemek için kullanılır. Panellerde BD, çökelti çözeltisi ve Mezofaz sırasıyla P ve M, işaretlenir. Beklenen 'bir tavada kızarmış yumurta'B iyi görünümü, bir uygun şekilde yüklenebilir ve sızdırmaz bir özelliğidir. C, çöktürücü bir off-merkezi konumda iyi düzgün akar olmuştur ve boşluk ile temas geldi. C, bu Mezofaz hacmi olması gerekenden daha az olduğunu da görünür. Çökelti çözeltisi ile tamamlanmamış yükleme için bir örnek ölçek için D'de gösterildiği gibi, tüm kuyu çapı 6 mm 'dir.
Discussion
Bu video yazıda otomatik bir protein yüklü lipidik Mezofaz kullanarak 96-sıra cam sandviç plakaları mezo kristallendirme çalışmalarında kurmak için bir robot nasıl kullanılacağını göstermiştir. Bu çalışmada kullanılan orijinal olarak 7 robot özel olarak tarif edildiği gibi, viskoz ve yapışkan bir mezofaz nanolitre hacimleri doğru ve tekrarlanabilir bir dağıtımı için bir pozitif yer değiştirme cam şırıngaya içerecek şekilde tasarlanmıştır.
Doğruluk ve hassasiyet bir robot önemli özellikleridir. Ancak, bu özellikleri robotun performansı değerlendirilir ve kalibrasyon gerçekleştirilir derece ve düzenlilik olarak sadece iyi. Bireysel plakaları kurmak edilirken robotun performansını değerlendirdi gerektiğini söylemeye gerek yok. Bu robotun kusursuz çalışır ve katılımsız çalıştırmak için robot bırakmak olduğunu varsaymak uygun değildir. Özenli ve dikkatli operatörü bir pos olmalıdırition bir ses falan düzgün çalışmıyor ve hemen düzeltmek için bir görünümü ile dikkat. Ayrıca, her plaka dikkatle en kısa sürede plaka mühürlü yanı içeriklerin bütünlüğü için göz tarafından kontrol edilmelidir ve kristalizasyon denemeleri için uzağa koymak önce. Bu sadece bir sonraki levha yüklenirken birkaç saniye gerçekleştirmek ve yapılabilir gerektirir. Fark, örneğin, özellikle kuyu tam dolu olmayan belirli bir çöktürücü boşaltım ucunu arızalı olduğu gerçeğini aydınlatabilir. Mezofaz teslim düzensiz olduğu görüldü olmalı, ilgili arızalı öğe hemen düzeltilmesi gerekir. Bu konularda dikkat ve kurulum sırasında ilgili ayarlamalar yaparak kadar değerli ve lipid membran proteini içeren, zaman ve malzeme tasarrufu olacaktır. Bir kamera kristal büyüme izlemek için kullanılırsa, doğruluk ve hassasiyet de görüntüleme sırasında izlenebilir. Damla veya hap ile Örneğin, sistematik problemlerkamera tarafından konumu bir şey doğru değildir ve protokol yerde akıntıya düzeltici eylem gerekli olduğunu gösterir.
Güvenilir performans çıkarları nedenle robotu düzenli aralıklarla kalibre edilmeli ve gerektiği gibi. Kalibrasyonları çökeltinin kuyuya bolus ve Çöktürücü yerleşim yanı sıra teslim Mezofaz hacmi içermelidir. Açıkçası, mümkün kalibrasyon kalite kontrol egzersiz kapsadığı dönemde yapılan çalışmalarda kullanılacak benzer hacimleri ve malzemeler kullanılarak yapılmalıdır.
Kalibrasyonu kadar önemlidir bu yüzden de stok robotu parçaları ve malzemeleri yeterli kaynağı yaşıyor edilir. Afet ve beklenmedik arızaları, tıkanıklıkları ve çöker ve meydana yapabilirsiniz. Böyle bir durumda, müsait bir yedek çöktürücü teslim ucu olan, örneğin, çok değerli bir zar proteini hazırlama gerektiği gibi kullanılmış olduğu anlamına olabilir veboşa değildir.
Bir robotun avantajları bazıları aslında devamlı çalışmak ve yorgunluğu 'şikayet' ya zarar vermez olacak gerçeğini içerir. Bir robot, aynı zamanda aydınlatma kontrollü ve çevresel şartlar altında, böyle karanlıkta insan dostu olarak kabul edilmez koşullar altında kullanılan ve aşırı sıcaklıklarda olabilir. Bu makale gösterilen robotlar tüm ~ 20 ° C'de ortam koşullarında kullanıldı Ancak, proteinlerin ve non-ortam sıcaklığında, kontrollü 11,12 ışık ve bir oksitleyici veya indirgeyici bir ortamda 13. gerektirmez proje vardır. Bütün bunlar, bir kristalizasyon robot kullanılan göreceli olarak kolay olan, yiyecek ve içecek olabilir.
Önceki bir Jüpiter Video yazıda mezo yöntemi ile kristallendirme çalışmalarında elle 1 kurmak nasıl gösterdi. El ile güvenilir bir şekilde vazgeçilebilir mezofaz arasında minimum hacmi b sınırlıdırçalışmaların oluşturulmasını kişinin y keskinliği görsel ve istikrarlı ellilik. Bizim tecrübelerimize göre, 100 nl gibi düşük Mezofaz hacimlerini kolaylıkla işlenir. Biz varsayılan hacmi 40 nl hakkında elle dağıtılan bir laboratuar biliyorum. Ancak, oldukça küçük hacimli bir robot kullanarak mümkündür. Bunların yanı sıra, 550 pikolitre gibi düşük mezofaz miktarlar robot 14 vazgeçilebilir olduğunu göstermiştir. Bu iş bakıldığında robot tarafından daha fazla minyatür uygulandığı takdirde, bir kristalizasyon deneme gerçekleştirmek için gerekli olan değerli zar proteini miktarının büyük bir azalmaya yol açacak olan, mümkün olduğu anlaşılmaktadır.
Bu video makalede, üç ticari robotlar lipidik mesophases kullanarak high-throughput membran protein kristalizasyon göstermek için kullanılmıştır. Bunlardan ilk olarak Jove 1712 1 anlatılan manuel denemeler kurma tecrübesine dayanarak MS & FB Grubu, geliştirilmiştir. Bu aletler olduğument ile en aşinalık var ve mevcut makale toplu kullanımı için ayrılmıştır. Diğer iki robot makale yazılmış ve ilgili görüntüleri eksiksizlik çıkarları buraya dahil edilmiştir zamanda MS & FB Grubu gösteri vardı. Her üç robotlar çok aynı Mezofaz dağıtım sistemi, pozitif deplasmanlı cam şırınga 5,7 olduğu temel özelliğini kullanın. Onlar Çöktürücü teslimat ile ilgili en belirgin olarak farklıdır. Robotlar 1 ve 2 8 kuyu, bir anda bir kristalizasyon plaka üzerinde tek bir sütuna aynı anda çöktürücü başarabilenin. Buna karşılık, Robot 3 tek bir eylem tüm 96 Çöktürücü çözümler dağıtır. Robot 2 tek çöktürücü dağıtım ipuçları ile yalnızca bir araçtır. Özellikle uygulamaya bağlıdır farklı enstrümanlar ile ilişkili artılarını ve eksilerini vardır ve bu burada ayrıntılarıyla olmayacak. Her üç çalışma söylemek yeterlidir ve beni kristaller ürettimezo yöntem ile mbrane proteinleri.
Makromoleküler kristalografisi tarafından yapı tayini genel sürecinde sonraki adımları hasat ve kriyo-serin kristalleri için bu videoyu makalede anlatıldığı gibi kurmak plakalar ve kayıt ve onlardan süreci X-ışını kırınımı için vardır. Bu konular bu serinin 1,15 ayrı vallahi makaleler kaplıdır.
Disclosures
Çıkar çatışması ilan etti.
Acknowledgments
Bu çalışmaya katkıda ve en Yapısal Membran ve Fonksiyonel Biyoloji Grup, geçmiş ve şimdiki üyeleri hem birçok kim vardır. Tüm etmek bizim en içten teşekkürlerimizi ve şükranlarımızı. Bu eser Bilim Vakfı İrlanda (07/IN.1/B1836), Ulusal Sağlık Enstitüleri (GM75915, P50GM073210 ve U54GM094599) ve FP7 COST Action CM0902 hibeleri ile kısmen desteklenmiştir.
Materials
| Name | Company | Catalog Number | Comments |
| Brayer (roller) | Fisher Scientific | 50820937 | Tool |
| Gas-tight syringes | Hamilton | 81030 | Tool |
| Glass coverslips | Marienfeld | 01029990911 | Disposable |
| Glass plates | Marienfeld | 1527127092 | Disposable |
| Gryphon LCP Robot | Art Robbins | NA | Tool |
| In meso robot | Anachem/Gilson | NA | Tool |
| Lab notebook | Various | NA | Tool |
| Mosquito LCP Robot | TTP Labtech | NA | Tool |
| Perforated double-stick spacer tape | Saunders Corporation (hole-punched) | customized | Disposable |
| Precipitant solutions | Various | Various | Reagent |
| Purified water | Millipore | NA | Reagent |
| Rain-X | Shell Car Care | 80199200 | Reagent |
| Syringe tips | Hamilton | 7770-020 (gauge 22) | Tool |
| Tissues | Various | Various | Disposable |
| Water bottle | various | NA | Reagent |
References
- Caffrey, M., Porter, C. Crystallizing membrane proteins for structure determination using lipidic mesophases. J. Vis. Exp. (45), e1712 (2010).
- Cherezov, V., Caffrey, M. Nano-volume plates with excellent optical properties for fast, inexpensive crystallization screening of membrane proteins. J. Appl. Crystallogr. 36, 1372-1377 (2003).
- Caffrey, M., Cherezov, V. Crystallizing membrane proteins using lipidic mesophases. Nat. Protocols. 4, 706-731 (2009).
- Liu, W., Cherezov, V. Crystallization of membrane proteins in lipidic mesophases. J. Vis. Exp. (49), e2501 (2011).
- Cherezov, V., Peddi, A., Muthusubramaniam, L., Zheng, Y. F., Caffrey, M. A robotic system for crystallizing membrane and soluble proteins in lipidic mesophases. Acta Crystallogr. D Bio.l Crystallogr. 60, 1795-1807 (2004).
- Peddi, A. High-throughput automated system for crystallizing membrane proteins in lipidic mesophases. IEEE Trans. Autom. Sci. Eng. 4, 129-140 (2007).
- Cheng, A., Hummel, B., Qiu, H., Caffrey, M. A simple mechanical mixer for small viscous lipid-containing samples. Chem. Phys. Lipids. 95, 11-21 (1998).
- Caffrey, M. Crystallizing membrane proteins for structure-function studies using lipidic mesophases. Biochem. Soc. Trans. 39, 725-732 (2011).
- Caffrey, M. Crystallizing membrane proteins for structure determination: use of lipidic mesophases. Annu. Rev. Biophys. 38, 29-51 (2009).
- Caffrey, M. Membrane protein crystallization. J. Struct. Biol. 142, 108-132 (2003).
- Gushchin, I., Reshetnyak, A., Borshchevskiy, V., Ishchenko, A., Round, E., Grudinin, S., Engelhard, M., Buldt, G., Gordeliy, V. Active State of Sensory Rhodopsin II: Structural Determinants for Signal Transfer and Proton Pumping. J. Mol. Biol. 412, 591-600 (2011).
- Jordan, P., Fromme, P., Witt, H. T., Klukas, O., Saenger, W., Krauss, N. Three-dimensional structure of cyanobacterial photosystem I at 2.5 angstrom resolution. Nature. 411, 909-917 (2001).
- Grawert, T., Span, I., Eisenreich, W., Rohdich, F., Eppinger, J., Bacher, A., Groll, M. Probing the reaction mechanism of IspH protein by x-ray structure analysis. Proc. Natl. Acad. Sci. USA. 107, 1077-1081 (2010).
- Cherezov, V., Caffrey, M. Picolitre-scale crystallization of membrane proteins. J. Appl. Crystallogr. 39, 604-606 (2006).
- Li, D., Boland, C., Aragao, D., Walsh, K., Caffrey, M. Harvesting and cryo-cooling crystals of membrane proteins grown in lipidic mesophases for structure determination by macromolecular crystallography. J. Vis. Exp. (67), e4001 (2012).
