

Summary
במסמך מתואר גישה רובוטית להתגבשות תפוקה גבוהה של חלבונים בממברנה בmesophases lipidic לשימוש בקביעת מבנה באמצעות קריסטלוגרפיה macromolecular ה-X. שלושה רובוטים המסוגל להתמודד mesophase הצמיג ודביק חלבון העמוס האינטגרלי לשיטה הם הציגו.
Abstract
מחקרי פונקצית מבנה של חלבוני קרום להפיק תועלת רבה מצורך ברזולוציה גבוהה מבני 3-D זמינים מהסוג הניתן באמצעות קריסטלוגרפיה של קרן ה-X macromolecular (MX). מרכיב חיוני של MX הוא אספקה קבועה של אידיאלי גבישים עקיפים באיכות. בטווה או שיטת lipidic מעוקב שלב (LCP) לגיבוש חלבוני קרום הוא אחת מכמה שיטות זמינות לגיבוש חלבונים בממברנה. היא עושה שימוש בmesophase bicontinuous לגדול בה גבישים. כשיטה, יש לו כמה צלחות מרהיבות של מנוח ומשך תשומת לב רבה עם קבוצות מחקר רבות שמתעניייינות כעת בשימוש בו. אחד האתגרים הקשורים בשיטה הוא שmesophase האירוח הוא מאוד צמיג ודביק, מזכיר משחת שיניים עבה. לפיכך, מחלקו באופן ידני באופן לשעתק בנפחים קטנים לתוך בארות התגבשות דורשת מיומנות, סבלנות ויד יציבה. פרוטוקול לעושה juרח שפותח בממברנה הביולוגיה מבנית ותפקודית (MS & FB) הקבוצה 1-3. מאמרי וידאו יופיטר המתארים את השיטה הם 1,4 זמין.
הגישה הידנית להגדרה בטווה ניסויים יש יתרונות ברורים עם יישומים מיוחדים, כגון אופטימיזציה של גביש וderivatization. זה אולם סובל מלהיות שיטת תפוקה נמוכה. הנה, אנחנו מדגימים את פרוטוקול לביצוע ניסויים בהתגבשות טווה כמו רובוט. רובוט מציע את היתרונות של מהירות, דיוק, דיוק, מזעור ולהיות מסוגל לעבוד ברציפות במשך תקופות ממושכות תחת מה יכול להיחשב כתנאים עוינים כמו בחושך, באווירת צמצום או בטמפרטורות נמוכות או גבוהות. בטווה רובוט, כאשר משתמשים בו כראוי, יכול לשפר את הפרודוקטיביות של מבנה חלבון קרום ומחקר פונקציה מאוד על ידי קידום גיבוש שהוא אחד מהצעדים האיטיים בצינור קביעת מבנה כללי.
במאמר זה וידאו, אנו מדגימים את השימוש בשלושה רובוטים זמינים מסחרי שיכול לוותר mesophase האינטגרלי לצמיג ודביק בcrystallogenesis טוו. הרובוט הראשון פותח בMS & FB קבוצת 5,6. שני האחרים הפכו לאחרונה זמינים ונכללים כאן לשלמות.
סקירה של הפרוטוקול המכוסה במאמר זה מוצגת באיור 1. כל המניפולציות שבוצעו בטמפרטורת חדר (~ 20 מעלות צלזיוס) בתנאי הסביבה.
Protocol
1. הכנת צלחת ההתגבשות
ההגדרה לעשות משפט התגבשות רובוט מתחילה בהכנת בסיס צלחת צלחת זכוכית כריך ההתגבשות (איור 2), שתוארה בפירוט בעיון 2. בסיס הצלחת חייבת להיות ראשון silanized וspacer כפול המקל המחורר שיוצר את הבארות, חייב להיות מיושם על הצלחת. את החומרים והציוד הדרושים לכך מפורטים בחומרים.
- מניח את הצלחת על מגבת נייר, חל כמה טיפין של silanizing פתרון ולהפיץ אותו באופן שווה על פני הצלחת עם מגבת נייר.
- הסר פתרון silanizing עודף ידי טבילת הצלחת בכוס מים.
- קח את הצלחת מהכוס, מניח אותו על נייר מגבת יבשה, צד silanized למעלה, ולייבש את המשטח החשוף שלה על ידי ניגוב קל עם מגבת נייר.
- לקלף את הכיסוי המגן על spacer המחורר, כפול המקלולהחיל את מרווח הצד, הדביק למטה, למשטח היבש, silanized של צלחת הזכוכית. הקפד שspacer ממוקם כראוי על בסיס הצלחת, עם הפינה השמאלית העליונה היד ושני הצדדים הסמוכים של spacer וצלחת, ביחד.
- השתמש ברולר או brayer כדי לשטח את spacer על בסיס הצלחת וליצור חותם חזק ביניהם.
צלחות מראש התאספו זמינות מסחרי (HR3-151, המפטון מחקר; MD11-55-100, ממדים מולקולריים; וLCP96T-UVP70U, Swissci). מסיבות בעלויות, אנו מעדיפים להרכיב הצלחות שלנו בעקבות הפרוטוקול לעיל.
2. בMeso 1 הרובוט
הראשון בטווה רובוט שהפגין במאמר זה וידאו הוא זה כעת בשימוש בMS & FB הקבוצה (איור 3). פירוט מלא של הרובוט ניתן למצוא תחת חומרים ובמדור ההדרכה 5. את החומרים והמכשורnt נדרש להגדיר משפט התגבשות באמצעות הרובוט מפורטים בחומרים.
- הנח את בסיס הצלחת עם spacer הכין בסעיף 1 על סיפונו של הרובוט. יש הפלטפורמה שלה המסומנת בעמדות גם למטרות של יישור בסיס צלחת. הצלחת צריכה להיות מתויגת למטרות זיהוי.
- אבטח את הבלוק 96-המזרז גם בפלטפורמה שלה על הסיפון של הרובוט לצד צלחת ההתגבשות.
- פתח את הבלוק בקפידה על ידי קילוף כובע איטום הפלסטיק.
- הפעל את מכשיר האדים ולהפנות את זרם האוויר לח מעל ומעבר לבסיס צלחת על סיפונו של הרובוט. מכשיר האדים הוכח כדי להפחית את האידוי של הפתרון הנמהר וכדי לשפר את השחזור פני צלחת ההתגבשות 5. זה יכול להיות מופעל לפני הגדרה מראש ללחלח את האזור כאשר הלחות יחסית הסביבה היא נמוכה, או בדרך אחרת, הרגע לפני הביטול של mesophase מתחיל.
- אתחל את הרובוט בהתאם להוראות היצרן. הוראות מכשיר ספציפיות לא תוארה כאן בכל פרט, כי נהלים מדויקים ישתנו עם זמן. בעיקרו של דבר, מה שקורה במהלך האתחול הוא שmesophase מחלק זרוע ברובוט מסופק עם עמדות התייחסות בשלושה כיוונים מאונכים X, Y ו-Z
- צרף mesophase חלבון העמוס במזרק המילטון, להשלים עם מחלק מחט, לזרוע של הרובוט 1 (איור 3). פירוט מלא של אופן הכנת mesophase ואיך לטעון אותו לתוך המזרק תואר כבר בהפניות 3,7-10.
- הסר את כיסוי המגן העליון מspacer על בסיס צלחת הגיבוש וליישר את הבארות בצלחת עם fiducials על פלטפורמת בסיס הצלחת. שים לב, במטרת הסרטון הזה, כיסוי המגן שנשאר במקום כדי לסייע המציג במהלך צעד היישור.
- יישר את קצה המחט של syring מהחלקדואר עם תחתית העליונה גם בפינה השמאלית של צלחת ההתגבשות (טוב A1). הדבר נעשה על ידי עין התאמת הגובה או Z-לתאם של הזרוע מהחלק תוך כדי הצפייה כמה קרוב קצה המחט מגיע לתחתית הבאר. שרק הקצה נוגע בתחתית הבאר אפשר לשפוט על ידי הזזת הצלחת מצד לצד בפלטפורמה תוך מעט שבמעט התאמת הגובה של הזרוע מהחלק.
- להיכנס למחשב Z-הקואורדינטות של זרוע מהחלק שבו קשר קצה הצלחת. נתינת עצות מתוכנת להתקיים עם קצה המחט 80 מיקרומטר מאזכור זה Z-עמדה אשר תואמת את פני השטח של בסיס הצלחת.
- מיקום על ידי עין קצה המחט במרכז ובכן A1. חנות במחשב שליטת X ההתייחסות, Y הקואורדינטות של זרוע מהחלק שבו את הקצה במרכזו. קואורדינטה זו משמשת להגדרת מרכז הבארות שנותרו על הצלחת.
- יחסי הציבורIME המזרק באמצעות הפקודה המתאימה במחשב הרובוט כדי להבטיח שmesophase הצח ממלא את מחט ניפוק וכי הבארות הראשונות ולאחר מכן תקבלנה השלמה המלאה שלהם mesophase. לנגב mesophase נמתח על קצה המחט בממחטת נייר.
- הפעל את תכנית הפעלת הרובוט (X-AP) ליזום סיבוב של שטיפת מדרגות שבו מחלק הטיפים הנחפזים על זרוע 2 של הרובוט הם שטפו ומוכנים לשאוב פתרונות מהגוש המזרז.
- הפעל את פונקציית לוותר על הרובוט להניע את הטעינה הרציפה של בארות עם mesophase חלבון עמוס (בדרך כלל 50 NL) הראשון, טור של שמונה בארות בכל פעם, ואחריו פתרונות נחפזים (בדרך כלל 800 NL). בין עמודי טעינה, חוזר זרוע מחלק mesophase לעמדת חניה שבו בסוף המחט ממוקם בספוג שהורטב כדי למנוע mesophase בקצה מההתייבשות. תהליך הניפוק mesophase והפזיז חוזר על עצמו11 פעמים על פני הצלחת עד הצלחת מלאה. הטעינה של צלחת 96 היטב עם mesophase ופזיז לוקחת 5 דקות כדי להשלים.
- ברגע שהצלחת מלאה ואת זרועות הרובוט חזרו לעמדותיהם בפרק, להסיר את הצלחת מהסיפון של הרובוט והנח אותו על משטח מוצק שטוח.
- באופן מיידי, לאטום את הצלחת עם כיסוי זכוכית כדי למזער את שינויי הזמן תלויים בהרכב טוב. חשוב להבטיח כי כל 96 הבארות מכוסות באופן מלא, שכיסוי הזכוכית מיושרת מרובעת עם בסיס צלחת ושאף אחד מכיסוי הזכוכית משתרעת מעבר לטביעת הרגל של בסיס הצלחת. רולר או brayer משמש ליצירה חזקה וחותם אחיד בין כיסוי הזכוכית וspacer.
- בדוק את הצלחת כדי להיות בטוח להגדיר הלך כמו שצריך. מה שמחפש הוא 'ביצה מטוגנת במחבת' בכל ההופעה טובה. החלמון של הביצה המטוגנת מתאים לmesophase. לבן של הביצה הוא soluti המזרזובקצה של מחבת ההיקף של ההתגבשות היטב. באופן אידיאלי, השלושה הם קונצנטרי.
- מכניס את צלחת אזור אחסון טמפרטורה מבוקרת לגידול גביש.
- אם אין יותר צלחות הן שיוקמו, להסיר את החסימה המזרזת מסיפון הרובוט, לאטום אותו היטב והחזיר אותו לאחסון.
- הוצא את המזרק המכיל mesophase מהזרוע מהחלק של הרובוט, לפרק אותו, ולשטוף את חלקיו, כולל מחט מחלק וטבעת חזוק, זהירות עם מתנול ויבש בתכשיר לשימוש הבא.
3. בMeso הרובוט 2. היתוש LCP
יתוש LCP הרובוט (איור 4) משלב מנפק mesophase דומה לזה המשמש עד 1 ברובוט. בניגוד לרובוט 1, זה dispenses מזרז באמצעות טיפים חד פעמים. תכנות תוכנה משמשת כדי להגדיר את המכשיר לעבודה עם צלחות התגבשות מסוימות וprecipitלוקי נמלה, ולוותר כרכי משתמש מוגדר של-mesophase ופזיז ברצף שהוגדר. פרטים כאלה מסופקים על ידי היצרן ולא תארו כאן.
- הכן את מזרק המילטון, להשלים עם מחט ומלאה בחלבון mesophase העמוס, כפי שתואר לעיל תחת 1 רובוט ובמאמר יופיטר 1712 1.
- הצמד את המזרק בתנוחה על הזרוע מהחלק של הרובוט.
- השתמש הסיפון רכוב חיישן ליזר כדי לקבוע את קואורדינטות X ו Y של המחט על המזרק מהחלק. זהו צעד חשוב נדרש כדי להבטיח שmesophase הוא חלק במדויק במרכזו של כל גם על הצלחת.
- בלחיצה על כפתור בלוח הבקרה, ראש המזרק לגרש mesophase מהמחט. הסר mesophase נמתח מקצה המחט עם רקמה בהכנה לשימוש ברובוט כדי לטעון בארות.
- לפני הצבת צלחת ההתגבשות על הסיפון הלח הרובוטen פני השטח של הפלטפורמה עם כמה טיפין של מים כדי לעזור להחזיק את הצלחת במקום על ידי הנימיות.
- הסר את כיסוי המגן מspacer על בסיס צלחת הזכוכית ולמקם אותו על הפלטפורמה שלה בחוזקה על מנת להבטיח היצמדות טובה. השתמש השלוש fiducials על הפלטפורמה כדי ליישר את 3 בארות פינה ובכך להבטיח מיקום נכון של הבארות בצלחת בכל הנוגע לקצה המחט מהחלק. המכשיר עכשיו פקד להיכנס מחזור חלק.
- המחזור מתחיל בצעד שני שבו יחול mesophase הוא לוותר על צלחת זכוכית קטנה באופן מיידי לפני שעברה לטעינת בארות עם mesophase טרי. עומסי הרובוט הראשונים עם mesophase טור אנכי של 8 בארות בצלחת ולאחר מכן משתמשים בטיפים חד הפעמיים לפתרון נמהר לוותר על גבי בולוס mesophase. התהליך חוזר על עצמו 11 פעמים לאורכו של הצלחת עד שכל הבארות מלאות. כל התהליך לוקח בערך 5 דקות כדי להשלים.
- להסירצלחת המלאה מהפלטפורמה של הרובוט ולאטום אותו עם כיסוי זכוכית כמתוארת לעיל תחת 1 רובוט.
- הנח את הצלחת, עם תווית נכונה, בסביבה מבוקרת טמפרטורה לגידול גביש.
4. בMeso 3 רובוט. Gryphon LCP
Gryphon LCP הרובוט (איור 5) משלב מערכת ניפוק mesophase דומה לזה שתואר לעיל עבור רובוטי 1 ו 2. מה שמבדיל אותו משני האחרים הוא שכל 96 הפתרונים נחפזים הם חלקו בו זמנית.
- הכן mesophase חלבון העמוס ולטעון אותו לתוך המזרק מהחלק, כמתואר לעיל, תחת 1 רובוטים ו2, ובמאמר יופיטר 1712 1.
- הצמד את המזרק בתנוחה על הזרוע מהחלק של הרובוט.
- הנח את בלוק הפתרון הנמהר וצלחת התגבשות על סיפונו של הרובוט.
- טען 96-טיפ heaד עם פתרונות נחפזים. זמן השהיה מוגדרת משתמש מסופק על מנת להקל aspirating מזרז צמיגה.
- שלוט במכשיר להיכנס למעגל מחלק. המחזור מתחיל בעובדה שספקה לך את mesophase רצף ל96 הבארות בתהליך שלוקח כ 1 דקות כדי להשלים. ראש 96-טיפ אז dispenses כל 96 הפתרונים הנחפזים בבת אחת על גבי את הפיתיונות המיובשים mesophase בבארות ההתגבשות. צלחת תהליך הטעינה כולו הוא סיים תוך 2 דקות.
- הסר את הצלחת המלאה מהפלטפורמה של הרובוט ולאטום אותו עם כיסוי זכוכית כמתוארת לעיל תחת 1 רובוט.
- הנח את הצלחת, עם תווית נכונה, בסביבה מבוקרת טמפרטורה לגידול גביש.
5. נציג תוצאות
מטרתו של מאמר זה וידאו היא להדגים כיצד להגדיר באופן אוטומטי ניסויי התגבשות עם צמיג, mesophase קרום חלבון עמוס בזכוכית sandwicצלחות 96-H. גם התגבשות הדגש הוא על אוטומציה באמצעות השימוש ברובוטים מיוחדים הדורשים התערבות ידנית מינימאלית. שחזור והדיוק, במונחים של היקפי mesophase ופזיזים לוותר והמיקום של שניהם בתוך הבאר, צפויים כאשר רובוט משמש. אלה הם חשובים מנקודת מבט של הקרנה אפקטיבית בתנאים שתומכים crystallogenesis. הם גם חיוניים לצעד הבא בצנרת הניתוח היא להעריך שצמיחת גביש נעשתה לעתים קרובות עם ציוד הדמיה. מיקום טיפה או בולוס הוא מפתח לתהליך ההדמיה, ומיקום לא סדיר ותקין של בולוס בבאר בדרך כלל דורש התערבות משתמש לתקן וללוקח זמן. לצורך ההמחשה, דוגמאות של צלחות עמוסות כראוי וכהלכה מוצגות באיור 6.
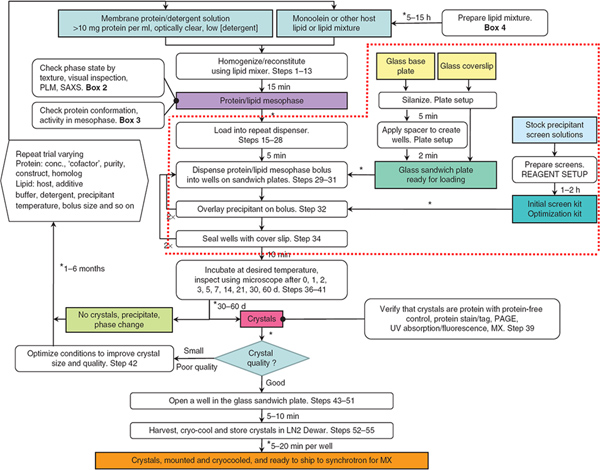
איור 1. תרשים הזרימה המסכם את השלבים הכרוכים בייצור, הקצירה וcryo-הקירור של גבישי חלבון קרום טווה שבגר. צעדים מוקפים הקו האדום המקווקו הם המוקד של מאמר זה יופיטר. רובוטים שמשו לוותר פתרוני mesophase ופזיזים בצעדים 29-32. מ3 קוד. לחץ כאן לצפייה בדמות גדולה.

איור 2. צלחת טעונה בהמלוא ונחתם 96-גם זכוכית כריך התגבשות. כל באר מכיל פתרון מזרז 1 μl שלב מעוקב 50 nl ו. למען בהירות, השלב מעוקב כבר מוכתם בסודאן אדומה והפתרון המזרז כולל כחול מתילן. מעיון 5.
_upload/4000/4000fig3.jpg "alt =" איור 3 "/>
איור 3. בטווה רובוט (1 רובוט). הרובוט יש שתי זרועות. זרוע 1 dispenses mesophase lipidic החלבון לאדן. זרוע 2 dispenses פתרונות נחפזים. במהלך מילוי, הצלחת 96-גם נשארת תקועה בעמדה על הסיפון של הרובוט שעצמו הוא נייח. שתי הזרועות לנוע כדי לספק פתרוני mesophase ופזיזים. מ3 קוד.

איור 4. יתוש LCP הרובוט (רובוט 2). בניגוד לרובוט 1, סיפון LCP היתוש, שעליה יושב צלחת 96-היטב ובלוק הפתרון המזרז, נע אופקי במהלך המילוי.

איור 5. Gryphon LCP הרובוט (3 רובוט). במהלךלהגדיר, מנפק השלב מעוקב lipidic נע כדי לספק חלבון mesophase עמוס לצלחת 96 היטב. הסיפון לאחר מכן מתרגם אופקי כדי למקם את הצלחת מתחת לראש קצה הפתרון המזרז. כל 96 הפתרונים נחפזים הם חלקו בו זמנית. תמונת מקורו מהיצרן (http://www.artrobbins.com/) וכותרתו.

איור 6. צלחת טעונה בהמלוא ונחתם 96-גם זכוכית כריך () ובארות כראוי (ב ') ושלא כדין (C, D) מלא שימוש ברובוט טווה (1 רובוט). תווית ברקוד על הצלחת במשמשת כדי לעקוב אחר הצלחת בצלחת מכשיר החממה / הדמיה. בלוחות BD פתרון, מזרז וmesophase מסומנים P ו-M בהתאמה. 'ביצה המטוגנת במחבת' הצפויהההופעה הטובה בB היא אופיינית לנטען כראוי ואטום היטב. ב-C, פזיז כבר חלק לתוך באר שלא כהלכה בעמדה מחוץ למרכז ובא במגע עם spacer. ב-C, שהוא יופיע מדי כי היקף mesophase הוא פחות ממה שצריך להיות. דוגמה לטעינה שלמה עם פתרון מזרז מוצגת בד לקנה מידה, הקוטר של כל הבארות הוא 6 מ"מ.
Discussion
במאמר זה וידאו שהראינו כיצד להשתמש ברובוט כדי להגדיר באופן אוטומטי בניסויי התגבשות טווה בצלחות זכוכית כריך 96-כן באמצעות mesophase lipidic חלבון עמוס. הרובוטים משמשים בעבודה זו תוכננו במיוחד כדי כוללים מזרק זכוכית תזוזה חיובית למסירה מדויקת ושחזור של כרכי nanoliter של mesophase הצמיג והדביק, כפי שתוארו במקור 7.
דיוק ותכונות חשובות של רובוט. עם זאת, מאפיינים אלה הם רק טובים כמו מידה וסדירות שביצועי רובוט מוערכים וכיול מתבצע. למותר לציין כי ביצועים של הרובוט צריכים להיות מוערכים ואילו צלחות בודדות שהקימו. אין זה ראוי להניח שהרובוט יתפקד ללא רבב ולעזוב את הרובוט לפעול ללא התערבות. המפעיל קשובים ומצוות צריך להיות בקופהition לציין על ידי צליל או מראה כשמשהו לא עובד כמו שצריך וכדי לתקן אותו באופן מיידי. בנוסף, כל צלחת יש לבדוק בקפידה על ידי עין אחידות בתכנים גם בהקדם הצלחת היא חתומה ולפני זה הוא לשים בצד לניסויי התגבשות. זה צריך לדרוש רק כמה שניות כדי לבצע וניתן לעשות זאת תוך הצלחת הסמוכה נטענת. שם לב, למשל, שבארות מסוימות לא מלאו כראוי עשוי להדגיש את העובדה שבקצה מחלק מסוים מזרז שאינו מתפקד כהלכה. צריכה מסירה של mesophase לראות כדי להיות לא סדיר, הפריט הפגום הרלוונטי היית צריך להיות מתוקן באופן מיידי. בכך שציין בנושאים אלה וביצוע ההתאמות הרלוונטיות במהלך הגדרה תהיה לחסוך זמן וחומרים, כולל שומנים ובעל ערך חלבון קרום. אם imager משמש למעקב אחר גידול גביש, דיוק ויכולים גם להיות במעקב במהלך הדמיה. לדוגמה, בעיות שיטתיות עם טיפה או בולוסמיקום על ידי imager מצביע על כך שמשהו לא בסדר ושפעולה מתקנת איפשהו במעלה זרם בפרוטוקול היא זקוק.
באינטרסים של ביצועים אמינים ולכן הרובוט חייב להיות מכויל על לוח זמנים קבוע ולפי צורך. כיולים צריכים לכלול נפח מזרז וmesophase נמסר כמו גם מיקום בולוס ופזיז בבאר. ברור, בכל המקום האפשרי כיול צריך להיעשות באמצעות כרכים וחומרים דומים לאלה שיהיו בשימוש בניסויים שנערכו בתקופה המכוסית בתרגיל בקרת האיכות.
חשוב כמו כיול כך גם הוא שיש במלאי אספקה נאותה של חלקי רובוט ואספקה. כישלונות קטסטרופליים ובלתי צפויים, חסימות וקריסות יכולות לקרות ואכן קורים. במקרה כזה, שזמין טיפ מסירת החלפה מאיצה, למשל, אולי זה אומר שהכנת חלבון קרום יקרה מאוד משמשת כמו שצריך ולא מתבזבז.
חלק מהיתרונות של רובוט כולל את העובדה שזה יעבוד למעשה ברציפות וכי היא אינה סובלת מאו 'מתלונן על "עייפות. רובוט יכול לשמש גם בתנאים שאינם נחשבים ידידותי לאדם, כמו בחושך, תחת תאורה נשלטת ותנאים סביבתיים, ובקצוות של טמפרטורה. הרובוטים הפגינו במאמר זה היו כל שימוש בתנאי סביבה ב~ 20 ° C. עם זאת, ישנם חלבונים ופרויקטים הדורשים טמפרטורות שאינן סביבה, אור מבוקר 11,12 וחמצון או סביבת הפחתת 13. כל אלה ניתן לדאוג גם ל, בקלות יחסית, כאשר רובוט התגבשות משמש.
במאמר וידאו יופיטר מוקדם יותר הפגנו כמה ניסויי התגבשות ידי בשיטה טווה מוגדרים ידני 1. ההיקף המינימאלי של mesophase שניתן לוותר מהימן ביד מוגבל בy handedness חזותי חדות והיציב של האדם שהציב את הניסויים. מניסיוננו, כרכים של mesophase נמוך כמו 100 nl מטופלות בקלות. אנחנו יודעים ממעבדה אחת שבה נפח ברירת המחדל חלק ידני הוא כ 40 nl. עם זאת, כמויות קטנות יותר במידה ניכרת הן אפשריות באמצעות רובוט. בנפרד, יש לנו הראינו כי נפחי mesophase נמוך כמו 550 picoliters ניתן לוותר רובוט 14. שמהעבודה היה ברור שהמזעור נוסף על ידי רובוט הוא אפשרי שאם ייושם, יוביל לירידה גדולה בכמות חלבון קרום יקר הנדרש לביצוע ניסוי התגבשות.
במאמר זה וידאו, שלושה רובוטים זמינים מסחרי שמשו להפגין התגבשות חלבון קרום תפוקה גבוהה באמצעות mesophases lipidic. הראשונה שבן פותחה בקבוצת MS & FB מבוסס על ניסיוננו להקים ניסויים באופן ידני, כמתואר ביופיטר 1712 1. זה instrument יש לנו היכרות עם ביותר ואת חלק הארי של המאמר הנוכחי מוקדש לשימוש בו. שני הרובוטים האחרים היו בהפגנה בטרשת הנפוצה וקבוצת FB בזמן כתיבת המאמר והקטעים הרלוונטיים נכלל כאן באינטרסים של שלמות. כל שלושה הרובוטים מאוד להשתמש באותה המערכת mesophase מחלק, תכונה החיונית שבם היא מזרק זכוכית תזוזה חיובית 5,7. הם נבדלים באופן משמעותי ביותר בכל קשורים לאספקה מזרזת. רובוטי 1 ו 2 יכולים לוותר מזרז במקביל ל8 בארות, טור אחד בצלחת התגבשות בכל פעם. בניגוד לכך, 3 רובוט dispenses כל 96 הפתרונים הנחפזים בפעולה אחת. רובוט 2 הוא הכלי היחיד עם טיפים חד פעמים נחפזות ניפוק. יש יתרונות וחסרונות הקשורים למכשירים השונים שתלויים ביישום המסוים, אלה לא הרחיבו על כאן. די לומר שכל השלוש העבודות והפיקו גבישים שליחלבוני mbrane ידי בשיטה טווה.
הצעדים הבאים בתהליך הכולל של קביעת מבנה על ידי קריסטלוגרפיה macromolecular הם לקציר ולגבישי cryo-מגניבים מצלחות שהוקמו כמתואר במאמר זה וידאו ולהקליט ועקיפים רנטגן תהליך מהם. נושאים אלה מכוסים במאמרי יופיטר נפרדים בסדרה 1,15 זה.
Disclosures
אין ניגודי האינטרסים הכריזו.
Acknowledgments
ישנם רב שתרמו לעבודה זו ורובם מן הקרום המבני ופונקציונלית קבוצת ביולוגיה, שניהם חברים בעבר ובהווה. לכולנו להרחיב את התודה וההערכה החמה שלנו. עבודה זו נתמכה בחלקו על ידי מענקים מקרן מדע אירלנד (07/IN.1/B1836), המכונים הלאומיים לבריאות (GM75915, P50GM073210 וU54GM094599), ועלות הפעולה CM0902 FP7.
Materials
| Name | Company | Catalog Number | Comments |
| Brayer (roller) | Fisher Scientific | 50820937 | Tool |
| Gas-tight syringes | Hamilton | 81030 | Tool |
| Glass coverslips | Marienfeld | 01029990911 | Disposable |
| Glass plates | Marienfeld | 1527127092 | Disposable |
| Gryphon LCP Robot | Art Robbins | NA | Tool |
| In meso robot | Anachem/Gilson | NA | Tool |
| Lab notebook | Various | NA | Tool |
| Mosquito LCP Robot | TTP Labtech | NA | Tool |
| Perforated double-stick spacer tape | Saunders Corporation (hole-punched) | customized | Disposable |
| Precipitant solutions | Various | Various | Reagent |
| Purified water | Millipore | NA | Reagent |
| Rain-X | Shell Car Care | 80199200 | Reagent |
| Syringe tips | Hamilton | 7770-020 (gauge 22) | Tool |
| Tissues | Various | Various | Disposable |
| Water bottle | various | NA | Reagent |
References
- Caffrey, M., Porter, C. Crystallizing membrane proteins for structure determination using lipidic mesophases. J. Vis. Exp. (45), e1712 (2010).
- Cherezov, V., Caffrey, M. Nano-volume plates with excellent optical properties for fast, inexpensive crystallization screening of membrane proteins. J. Appl. Crystallogr. 36, 1372-1377 (2003).
- Caffrey, M., Cherezov, V. Crystallizing membrane proteins using lipidic mesophases. Nat. Protocols. 4, 706-731 (2009).
- Liu, W., Cherezov, V. Crystallization of membrane proteins in lipidic mesophases. J. Vis. Exp. (49), e2501 (2011).
- Cherezov, V., Peddi, A., Muthusubramaniam, L., Zheng, Y. F., Caffrey, M. A robotic system for crystallizing membrane and soluble proteins in lipidic mesophases. Acta Crystallogr. D Bio.l Crystallogr. 60, 1795-1807 (2004).
- Peddi, A. High-throughput automated system for crystallizing membrane proteins in lipidic mesophases. IEEE Trans. Autom. Sci. Eng. 4, 129-140 (2007).
- Cheng, A., Hummel, B., Qiu, H., Caffrey, M. A simple mechanical mixer for small viscous lipid-containing samples. Chem. Phys. Lipids. 95, 11-21 (1998).
- Caffrey, M. Crystallizing membrane proteins for structure-function studies using lipidic mesophases. Biochem. Soc. Trans. 39, 725-732 (2011).
- Caffrey, M. Crystallizing membrane proteins for structure determination: use of lipidic mesophases. Annu. Rev. Biophys. 38, 29-51 (2009).
- Caffrey, M. Membrane protein crystallization. J. Struct. Biol. 142, 108-132 (2003).
- Gushchin, I., Reshetnyak, A., Borshchevskiy, V., Ishchenko, A., Round, E., Grudinin, S., Engelhard, M., Buldt, G., Gordeliy, V. Active State of Sensory Rhodopsin II: Structural Determinants for Signal Transfer and Proton Pumping. J. Mol. Biol. 412, 591-600 (2011).
- Jordan, P., Fromme, P., Witt, H. T., Klukas, O., Saenger, W., Krauss, N. Three-dimensional structure of cyanobacterial photosystem I at 2.5 angstrom resolution. Nature. 411, 909-917 (2001).
- Grawert, T., Span, I., Eisenreich, W., Rohdich, F., Eppinger, J., Bacher, A., Groll, M. Probing the reaction mechanism of IspH protein by x-ray structure analysis. Proc. Natl. Acad. Sci. USA. 107, 1077-1081 (2010).
- Cherezov, V., Caffrey, M. Picolitre-scale crystallization of membrane proteins. J. Appl. Crystallogr. 39, 604-606 (2006).
- Li, D., Boland, C., Aragao, D., Walsh, K., Caffrey, M. Harvesting and cryo-cooling crystals of membrane proteins grown in lipidic mesophases for structure determination by macromolecular crystallography. J. Vis. Exp. (67), e4001 (2012).
