

Summary
हम गिनती मछलियों के लिए एक नई विधि का वर्णन है, और सापेक्ष बहुतायत (MaxN) और मछली घनत्व का आकलन स्टीरियो घूर्णन-वीडियो कैमरा सिस्टम का उपयोग कर । हम यह भी दर्शाता है कि कैसे प्रजातियों विशेष जासूस का अनुमान करने के लिए कैमरे से दूरी (जेड दूरी) का उपयोग करने के लिए ।
Abstract
मछली के पारिस्थितिक अध्ययन में वीडियो कैमरा सिस्टम का उपयोग करने के लिए एक व्यवहार्य, मछली लंबाई को मापने और मछली बहुतायत का आकलन के गैर निकालने पद्धति के रूप में कर्षण लाभ जारी है । हम विकसित और एक घूर्णन स्टीरियो-वीडियो कैमरा उपकरण है कि नमूना है, जो स्थिर कैमरा उपकरण की तुलना में नमूना प्रयास को अधिकतम करने के लिए एक पूर्ण ३६० डिग्री शामिल लागू किया गया । अध्ययन की एक किस्म स्थिर, स्टीरियो कैमरा सिस्टम की क्षमता विस्तृत करने के लिए मछली की अत्यधिक सटीक और सटीक माप प्राप्त है; यहां ध्यान केंद्रित methodological दृष्टिकोण के विकास पर मछली का घनत्व यों तो घूर्णन कैमरा सिस्टम का उपयोग कर रहा था । पहले दृष्टिकोण के लिए मीट्रिक MaxN, जो आम तौर पर एक दिया कैमरा सर्वेक्षण पर मनाया मछली की ंयूनतम संख्या के एक रूढ़िवादी गिनती है की एक संशोधन विकसित किया गया । हम MaxN को परिभाषित करने के लिए मछली की अधिकतम संख्या हो कैमरा प्रणाली के किसी भी रोटेशन में मनाया । जब सावधानियों दोहरी गिनती से बचने के लिए ले रहे हैं, MaxN के लिए इस विधि और अधिक सही है कि एक निश्चित कैमरे से प्राप्त की तुलना में सच बहुतायत को प्रतिबिंबित कर सकते हैं । दूसरे, क्योंकि स्टीरियो-वीडियो मछली तीन आयामी अंतरिक्ष में मैप किया जा करने के लिए अनुमति देता है, से दूरी की सटीक अनुमान-कैमरे से प्रत्येक मछली के लिए प्राप्त किया जा सकता है । का उपयोग करके कैमरे से मनाया दूरी के ९५% प्रतिशत की प्रजातियों की स्थापना के लिए विशिष्ट क्षेत्रों का सर्वेक्षण किया, हम प्रजातियों के बीच में पता लगाने में अंतर के लिए खाते जबकि अधिकतम दूरी एक प्रजाति का उपयोग करके कमजोर घनत्व के अनुमान से परहेज मनाया. पता लगाने की इस श्रेणी के लिए लेखांकन सही मछली बहुतायत का अनुमान करने के लिए महत्वपूर्ण है । यह पद्धति दोनों एप्लाइड विज्ञान और प्रबंधन संदर्भों में स्टीरियो-वीडियो उपकरण घूर्णन के एकीकरण की सुविधा होगी ।
Introduction
अमेरिका के प्रशांत तट के साथ, वाणिज्यिक और मनोरंजन groundfish मत्स्य पालन के लिए महत्वपूर्ण प्रजातियों में से कई (जैसे, rockfish परिसर (Sebastes एसपीपी.) और Lingcod (Ophiodon elongatus)) दृढ़ता से जुड़े हुए है उच्च राहत, हार्ड नीचे निवास1,2,3,4,5। स्टीरियो-वीडियो ड्रॉप कैमरों रिश्तेदार आसानी और आपरेशन की सादगी के कारण रॉकी निवास में उपयोग करने के लिए एक आकर्षक गैर निष्कर्षण उपकरण हैं । स्टीरियो वीडियो कैमरा सिस्टम की एक किस्म विकसित किया गया है और दक्षिणी गोलार्द्ध में तैनात, उथले पानी पारिस्थितिकी प्रणालियों6,7,8,9,10, और हाल ही में, वीडियो ड्रॉप कैमरों गहरे पानी रॉकी के लिए एक प्रबंधन उपकरण के रूप में कर्षण प्राप्त किया है-प्रशांत तट के साथ चट्टान वातावरण11,12,13। हम एक स्टीरियो-वीडियो कैमरा सिस्टम का उपयोग करके इन मौजूदा स्टीरियो कैमरा डिजाइन को संशोधित करने की मांग की (इसके बाद के रूप में "उतरा" के लिए भेजा) और अधिक कुशलता से केंद्रीय प्रशांत तट के साथ उच्च राहत seafloors में मछली आबादी विशेषताएं (देखें तालिका सामग्री) । इस्तेमाल किया लैंडर मौजूदा वीडियो सिस्टम से अलग था क्योंकि कैमरे के एक केंद्रीय घूर्णन बार है, जो छोड़ स्थान14पर seafloor के कवरेज के एक पूर्ण ३६० डिग्री के लिए अनुमति के लिए मुहिम शुरू की थी । भूमिर प्रति मिनट एक पूर्ण रोटेशन है, जो हमें तेजी से बहुतायत और एक क्षेत्र के समुदाय की संरचना की विशेषता और कम भूमि वाले तैनाती के साथ सांख्यिकीय शक्ति के एक ही स्तर को प्राप्त करने की अनुमति पूरी की । (देखें स्टार (२०१६)14 अधिक विस्तार के लिए भूमिक विंयास की विशेष पर) । अध्ययन प्रणाली में प्रारंभिक परीक्षणों का सुझाव दिया है कि हमारे सर्वेक्षण में कैमरों के आठ rotations प्रजातियों बहुतायत और समृद्धि की विशेषता के लिए पर्याप्त थे । यह दृढ़ संकल्प प्रजातियों बहुतायत और अब बूंदों पर मछली घनत्व में रिटर्न कम के एक प्रेक्षण द्वारा किया गया था । हम अनुशंसा करते है कि अब समय सोख सहित एक प्रायोगिक अध्ययन किसी भी नई प्रणाली में आयोजित की एक दिया पारिस्थितिकी तंत्र/
युग्मित स्टीरियो कैमरे का उपयोग करके, दोनों कुल सर्वेक्षण क्षेत्र और पूर्ण मछली घनत्व प्रत्येक वीडियो सर्वेक्षण के लिए गणना की जा सकती है; हालांकि, घूर्णन कैमरों का उपयोग पारंपरिक मछली गणना मैट्रिक्स के संशोधन आवँयक है । स्टेशनरी वीडियो सिस्टम सबसे अधिक बार "MaxN" एक परिनियोजन6,10पर मछलियों की एक रूढ़िवादी गिनती के रूप में उपयोग करें । पारंपरिक MaxN एक दिया प्रजातियों में से अधिकतम संख्या का वर्णन एक ही वीडियो फ्रेम में एक साथ मनाया, क्रम में डबल एक मछली है कि छोड़ दिया है और फ्रेम करने के लिए वापस गिनती से बचने के लिए । MaxN इसलिए मछली की ंयूनतम संख्या के लिए वर्तमान जाना जाता है और सच है मछली बहुतायत6,10कम कर सकते है एक अनुमान है । MaxN मीट्रिक को कैमरों के प्रत्येक पूर्ण रोटेशन में देखा मछली की सबसे बड़ी संख्या का प्रतिनिधित्व करने के लिए परिभाषित किया गया था ।
पिछले स्टीरियो वीडियो तरीकों के लिए दूसरा संशोधन तथ्य यह है कि विभिंन आकार, रंग की प्रजातियों के लिए खाते में था, और आकार विश्वसनीय पहचान के विभिंन अधिकतम दूरी है । उदाहरण के लिए, O. elongatus जैसी बड़ी प्रजातियों में एक विशिष्ट विस्तृत आकार होता है और यह Squarespot Rockfish (Sebastes hopkinsi) जैसे छोटे और गुप्त प्रजातियों के साथ तुलना में बहुत अधिक दूरी पर मज़बूती से पहचाना जा सकता है । पता लगाने की इन विभिन्न अधिकतम पर्वतमाला प्रभावी क्षेत्र प्रत्येक प्रजाति के लिए भूमिक द्वारा नमूना बदल जाते हैं । क्योंकि स्टीरियो कैमरों हमें सटीकता की एक उच्च डिग्री के साथ तीन आयामी अंतरिक्ष में हर मछली जगह के लिए अनुमति देते हैं, एक कैमरों कि प्रत्येक मछली मापा गया था से दूरी निर्धारित कर सकते हैं (यानी, "जेड दूरी", "के लिए नाम z-अक्ष" जो है सीधे कैमरों के बीच तैयार की रेखा को सीधा) । प्रत्येक प्रजातियों के लिए, जिस दूरी के भीतर सभी व्यक्तियों के ९५% मनाया गया (इसके बाद "९५% जेड दूरी") के लिए सर्वेक्षण क्षेत्र की त्रिज्या माना जाता था, और कुल सर्वेक्षण क्षेत्र की गणना करने के लिए इस्तेमाल किया गया था । प्रजातियों के अलावा विशिष्ट विशेषताओं, पहचान के पानी मैलापन जैसे पर्यावरणीय परिस्थितियों से प्रभावित हो जाएगा । इन कारकों समय और स्थान में भिंन हो सकते हैं, क्योंकि यह केवल कुल में ९५% Z सांख्यिकीय का उपयोग करने के लिए महत्वपूर्ण है । हालांकि यह बड़े नमूनों के लिए बहुत सटीक होगा, किसी भी एक व्यक्ति सर्वेक्षण क्षेत्र सर्वेक्षण में भिन्न हो सकते हैं.
नीचे विस्तृत प्रोटोकॉल कैसे बनाने के लिए और इन मैट्रिक्स का उपयोग करने पर मार्गदर्शन प्रदान करता है । हालांकि ध्यान प्रशांत तट के साथ गहरे पानी रॉकी वास विशेषताएं था, संशोधित MaxN गिनती के लिए वर्णित पद्धति आसानी से किसी भी घूर्णन ड्रॉप कैमरा प्रणाली के लिए लागू है । मछली आबादी को चिह्नित करने के लिए आवश्यक कैमरा घुमावों की संख्या स्थानीय पारिस्थितिकी तंत्र गतिशीलता पर निर्भर करेगी, लेकिन संशोधित MaxN के अवधारणा ही रहेंगे. इसी प्रकार, जबकि हम 3 डी photogrammetric सॉफ्टवेयर स्टीरियो वीडियो का विश्लेषण करने के लिए इस्तेमाल किया, यहां वर्णित तकनीक आसानी से सॉफ्टवेयर प्लेटफार्मों भर में लागू कर रहे हैं, जब तक तीन आयामी अंतरिक्ष में मछली की सटीक स्थान संभव है । इसके अतिरिक्त, एक ९५% Z दूरी मान लागू करने के दृष्टिकोण स्टीरियो के साथ भविष्य के अध्ययन में माना जा सकता है-कैमरों प्रजातियों के लिए खाते के लिए-जासूस की विशिष्ट पर्वतमाला और अधिक सही मछली बहुतायत की गणना करने के लिए ।
Subscription Required. Please recommend JoVE to your librarian.
Protocol
नोट: सॉफ़्टवेयर चरणों के स्क्रीनशॉट अनुपूरक फ़ाइलोंके रूप में शामिल किए जाते हैं । कृपया ध्यान दें कि नीचे वर्णित सॉफ़्टवेयर चरण चुने गए सॉफ़्टवेयर के लिए विशिष्ट है ( सामग्री की तालिकादेखें) । समग्र दृष्टिकोण किसी भी स्टीरियो सॉफ्टवेयर मंच के लिए बढ़ाया जा सकता है ।
1. विश्लेषण के लिए स्टीरियो कैमरा फुटेज तैयार
नोट: अंशांकन एक अंशांकन घन का उपयोग अनुशंसित है । एक अंशांकन घन सतह पर ठीक से तैनात चिंतनशील डॉट्स के साथ एक तीन आयामी एल्यूमीनियम फ्रेम है । जब अंशांकन सॉफ्टवेयर के साथ संयोजन के रूप में इस्तेमाल किया, एक अंशांकन घन चेकरबोर्ड दृष्टिकोण9से अधिक से अधिक परिशुद्धता और सटीकता की ओर जाता है ।
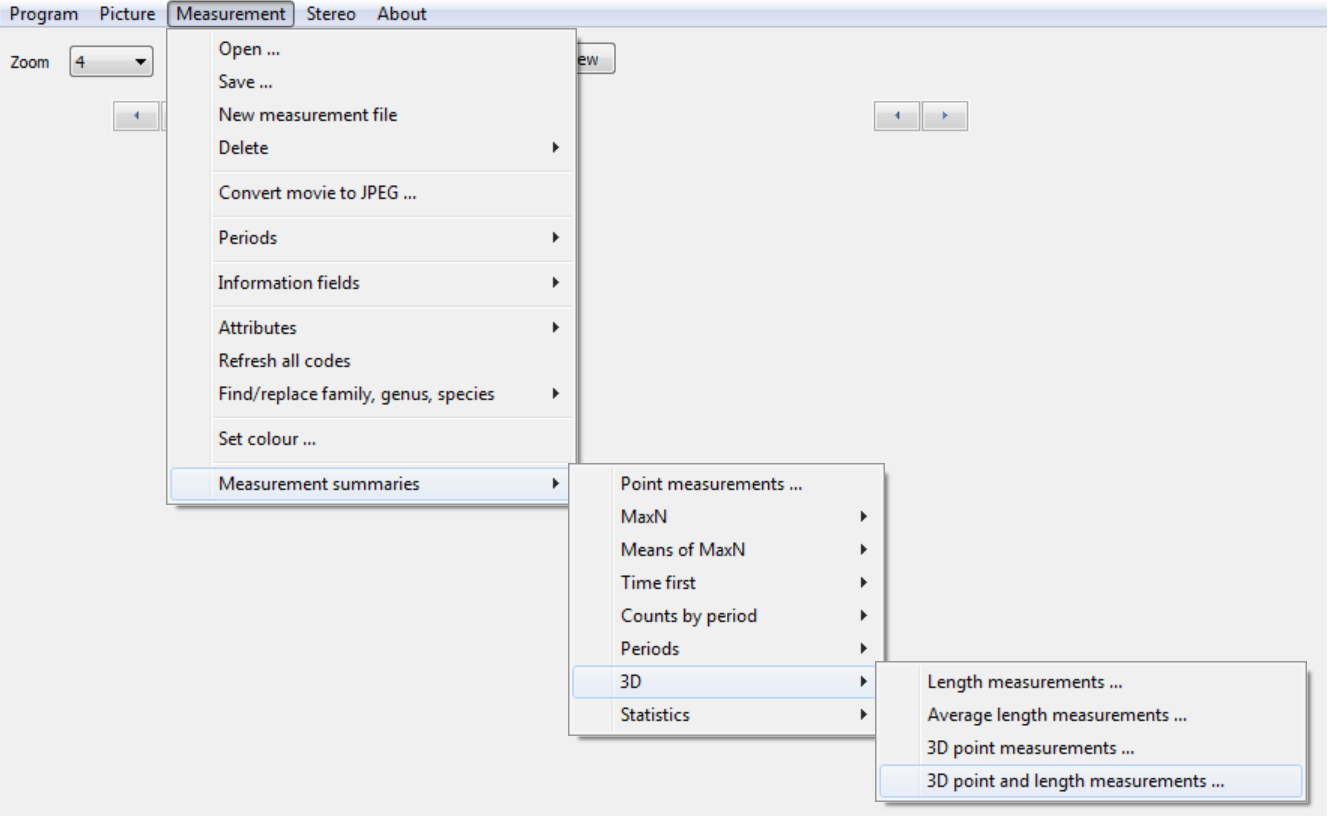
- स्टीरियो अंशांकन सॉफ्टवेयर (चित्रा 1 और चित्रा 2के साथ लैंडर कैमरों जांचना; एक सॉफ्टवेयर सिफारिश के लिए सामग्री की तालिका देखें) ।
नोट: अंशांकन अलग दूरी पर ज्ञात आकारों के लक्ष्य को मापने के द्वारा क्षेत्र में उपयोग करने से पहले सत्यापित किया जा सकता है ( अनुपूरक वीडियो 1देखें). 3 मीटर (या कम) की दूरी पर एक ५०-cm लक्ष्य के लिए औसत माप त्रुटि ज्ञात लक्ष्य लंबाई के 2% के भीतर होना चाहिए । यह भी ध्यान दें कि एक दिया अंशांकन केवल मान्य होगा अगर कैमरा पदों के सापेक्ष एक दूसरे को बदल नहीं है । यह ध्यान रखना महत्वपूर्ण है और कैमरे के अवांछित jostling से बचने जब तक सभी नमूना प्रदर्शन किया गया है । - नपे लैंडर (चित्रा 1, अनुपूरक वीडियो 2) का उपयोग कर फ़ील्ड डेटा एकत्र करें ।
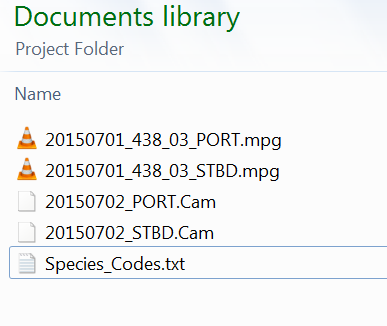
- फ़ील्ड अध्ययन के पूरा होने के बाद, दोनों वीडियो और अंशांकन फ़ाइलों वाले एक नया प्रोजेक्ट फ़ोल्डर बनाएँ ।
नोट: प्रत्येक परियोजना फ़ोल्डर में पांच फ़ाइलों की ंयूनतम करने की जरूरत है: बाएं और दाएं "। कैम "अंशांकन फ़ाइलें, बाएँ और दाएँ वीडियो फ़ाइलें (. MP4 या. AVI स्वरूप केवल), और प्रजातियों की सूची (. txt स्वरूप) । - स्टीरियो माप सॉफ्टवेयर में, एक नया माप परियोजना शुरू, और उचित वीडियो और अंशांकन फ़ाइलों को लोड.
नोट: सभी सॉफ़्टवेयर चरणों के स्क्रीनशॉट अनुपूरक फ़ाइलोंके बीच उपलब्ध होते हैं ।- ' माप ' > ' नई माप फ़ाइल ' पर नेविगेट करें ।
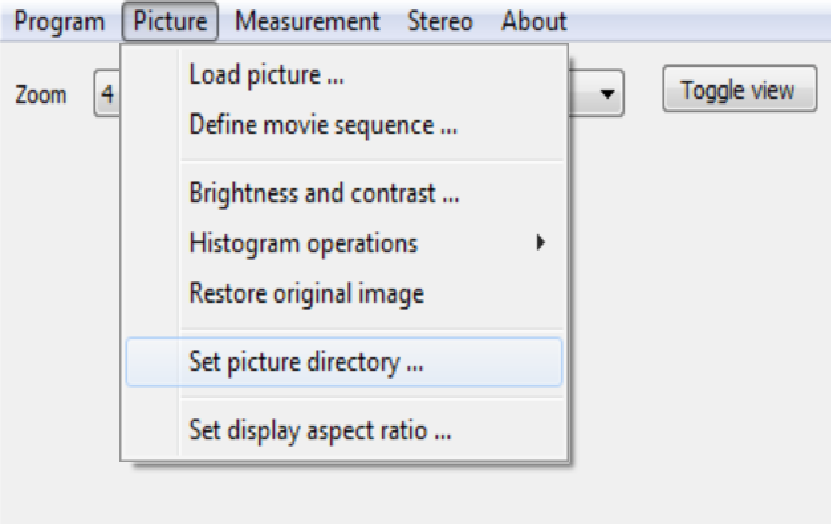
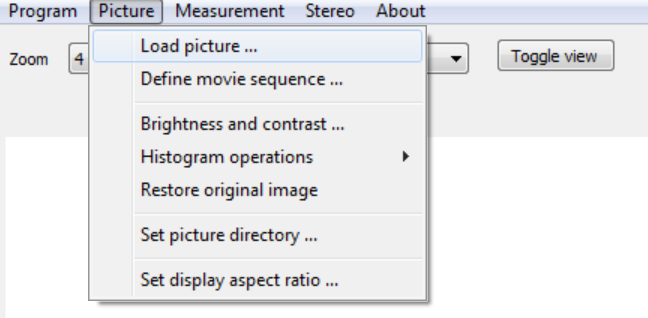
- चित्र निर्देशिका में नेविगेट करने के लिए ' चित्र ' > सेट चित्र निर्देशिका ' सेट करें, और सभी प्रोजेक्ट फ़ाइलों वाले फ़ोल्डर का चयन करें ।
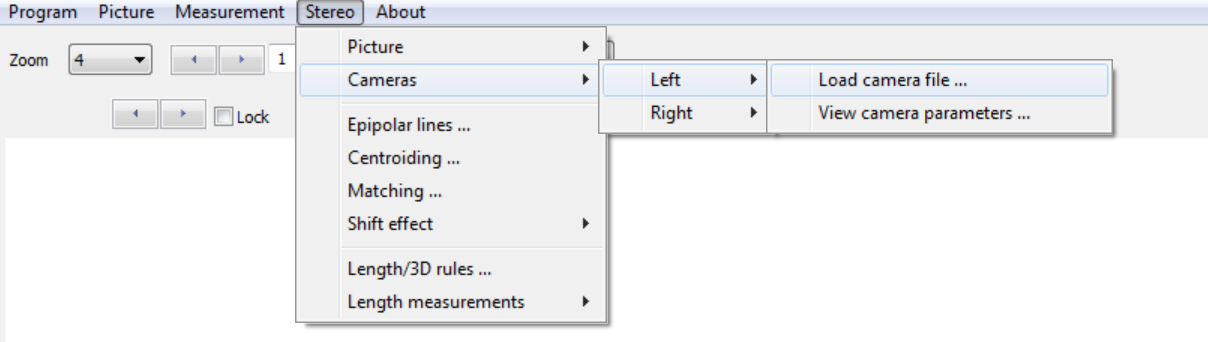
- बाएं कैमरा लोड "। कैम "के लिए ' स्टीरियो नेविगेट द्वारा फ़ाइल > ' कैमरा ' > ' छोड़ दिया ' > ' लोड कैमरे फ़ाइल ' और उचित फ़ाइल का चयन.
- दोहराएँ चरण 1.4.3 सही कैमरा लोड करने के लिए ". Cam "फाइल
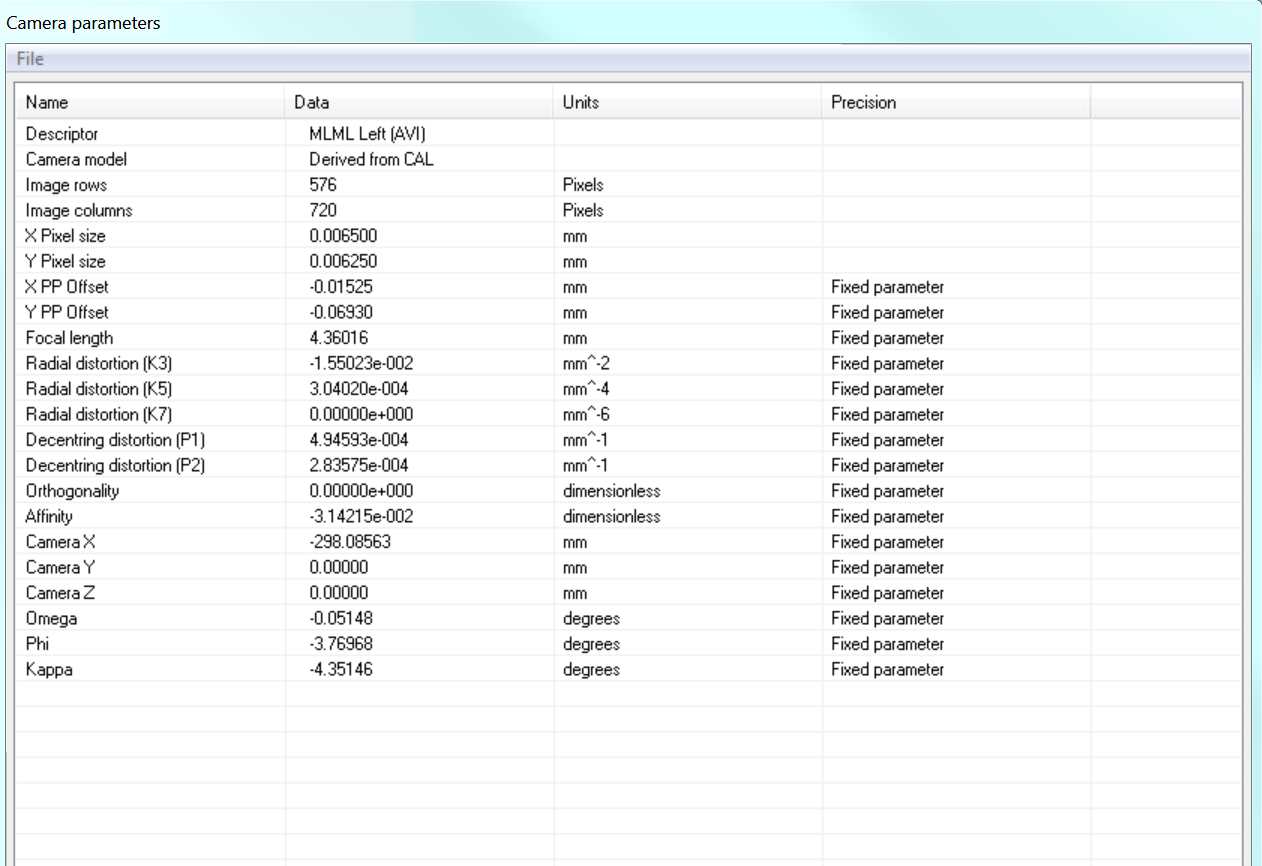
नोट: इन फ़ाइलों को प्रत्येक कैमरे के लिए अंशांकन माप होते हैं (उदा., पिक्सेल आकार, पहलू अनुपात, रेडियल विरूपण, decentring विरूपण, आदि) और मछली को मापने और दूरी से कैमरे की गणना करने के लिए इस्तेमाल किया जाएगा (यानी, जेड दूरी) । - ' पिक्चर ' > ' फिल्म अनुक्रम को परिभाषित ' और बाएँ कैमरा वीडियो फ़ाइल का चयन करने के लिए नेविगेट करके छोड़ दिया वीडियो फ़ाइल के लिए फिल्म अनुक्रम को परिभाषित करें ।
- ' चित्र ' > ' लोड ' चित्र का चयन करके माप सॉफ्टवेयर में वाम वीडियो फ़ाइल लोड ।
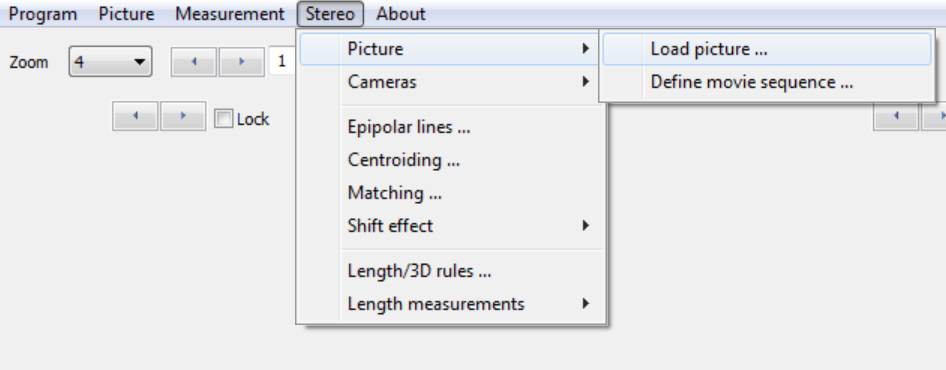
नोट: सुनिश्चित करें कि ' लॉक ' बॉक्स वीडियो फ़ाइलों को लोड करने से पहले अनियंत्रित है । यह दोनों वीडियो एक साथ लोड करने के लिए अनुमति देता है । - फिल्म अनुक्रम को परिभाषित और मेनू ' स्टीरियो ' > ' चित्र ' > ' फिल्म अनुक्रम को परिभाषित ' और ' स्टीरियो ' > ' चित्र ' > ' लोड तस्वीर ' का उपयोग सही वीडियो के लिए वीडियो फ़ाइल लोड ।
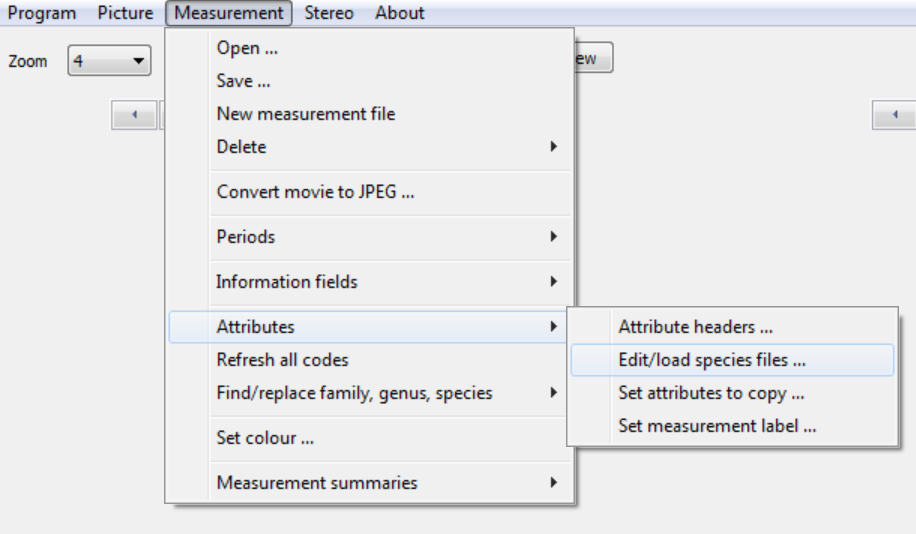
- ' माप ' > ' विशेषताएँ ' > ' संपादित करें/लोड प्रजातियों फ़ाइल ' नेविगेट करके प्रजातियों की सूची लोड ।
- ' जानकारी फ़ील्ड ' > ' संपादित करें फ़ील्ड मान ' के अंतर्गत सर्वेक्षण ID जानकारी दर्ज करें और एक बनाने के लिए फ़ाइल सहेजें । EMObs सक्छन् ।
- लाइट फ़्लैश, handclap, समंवित यूनिवर्सल समय (UTC) स्टांप, या दोनों वीडियो में होती है जो किसी भी समय विशिष्ट इवेंट का उपयोग करते हुए वीडियो सिंक्रनाइज़ करें ।
- UTC समय स्टांप का उपयोग करते हैं, तो समय स्टांप एक नया दूसरा प्रारंभ होता है जब तक कि बाएँ वीडियो में फ़्रेम-चरण आगे । और प्रकाश फ़्लैश या handclap होता है जब तक आगे फ्रेम ।
- फ़्रेम-कदम सही वीडियो आगे जब तक समय स्टांप बिल्कुल बाएं वीडियो मेल खाता है । और सही पल प्रकाश फ़्लैश या handclap जब तक आगे कदम फ्रेम वाम वीडियो से मेल खाता है ।
नोट: यह महत्वपूर्ण है कि वीडियो एक ही फ्रेम करने के लिए सिंक्रनाइज़ किया जा । वीडियो सिंक्रनाइज़ेशन समय-समय पर विश्लेषण के दौरान कैमरा फ़्रेम बहाव से बचने के लिए वीडियो टाइम स्टांप का उपयोग कर जाँच की जानी चाहिए । एक फिल्माया हाथ ताली भी वीडियो की शुरुआत और अंत में इस्तेमाल किया जा सकता है कि सही परीक्षण और बाईं वीडियो एक ही फ्रेम करने के लिए synced थे ।
- वीडियो एक साथ खेलते हैं और तुल्यकालन बनाए रखने के लिए सुनिश्चित करने के लिए "लॉक" बटन पर क्लिक करें ।
2. बिंदु गिनती उत्पन्न और MaxN की गणना
नोट: प्रत्येक मछली शुरू में सबसे कम संभव वर्गीकरण संकल्प के लिए एक 2d बिंदु के साथ चिह्नित है । अनिश्चित आईडी के साथ मछली बाद में समीक्षा के लिए चिह्नित किया जाना चाहिए ।
- एक पूर्ण ३६० डिग्री का उपयोग किया जाता है यह सुनिश्चित करने के लिए एक पूरा कैमरा रोटेशन के अंत तक मछली गिनती शुरू करने के लिए रुको । इसके अलावा, जब तक तलछट (आम तौर पर नीचे के साथ संपर्क के बाद < 1-2 मिनट) मंजूरी दे दी है रुको ।
- जैसे ही लैंडर अपनी पहली रोटेशन शुरू होता है, एक नया नमूना अवधि को परिभाषित करने के लिए ठीक क्लिक करें: ' अवधि परिभाषा ' > ' नई शुरुआत की अवधि जोड़ें '. "01" के रूप में प्रथम अवधि नाम दर्ज करें और "ठीक" क्लिक करे ।
- के रूप में लैंडर घूमता है, एक मछली है कि एक 2d बिंदु के साथ फ्रेम में केवल बाएं कैमरे का उपयोग कर आता अंकन शुरू करते हैं ।
- एक 2d बिंदु जोड़ने के लिए, ठीक क्लिक करें, चुनें ' बिंदु जोड़ें ', और सही प्रजातियों का नाम चुनें । अज्ञात प्रजातियों के लिए ' एसपीपी. ' का चयन करने के लिए सबसे कम संभव वर्गीकरण स्तर पर लेबल, और "ठीक" क्लिक करें ।
- जारी रखने के लिए प्रत्येक नई मछली के अनुसार कदम 2.2.1 के समापन तक रोटेशन के निशान ।
- दोहराने प्रोटोकॉल प्रक्रियाओं २.१-२.२ प्रत्येक अतिरिक्त भूमिहीन रोटेशन के लिए-सुनिश्चित करना है कि एक नई अवधि के प्रत्येक कैमरा रोटेशन के शुरू में परिभाषित किया गया है ।
नोट: प्रजातियों संचय curves निर्धारित करने के लिए इस्तेमाल किया गया है कि आठ rotations थे, औसत पर, वर्तमान अध्ययन में मछली बहुतायत विशेषताएं पर्याप्त । शोधकर्ताओं ने अतिरिक्त कैमरा घुमाव के साथ प्रारंभिक परीक्षणों के संचालन पर विचार करना चाहिए, अब समय सोख, एक विशेष पारिस्थितिकी तंत्र के भीतर कैमरे के घुमाव की इष्टतम संख्या विशेषताएं । - प्रजातियों की गणना-व्यक्तियों की विशिष्ट गिनती कैमरा रोटेशन प्रति मनाया ।
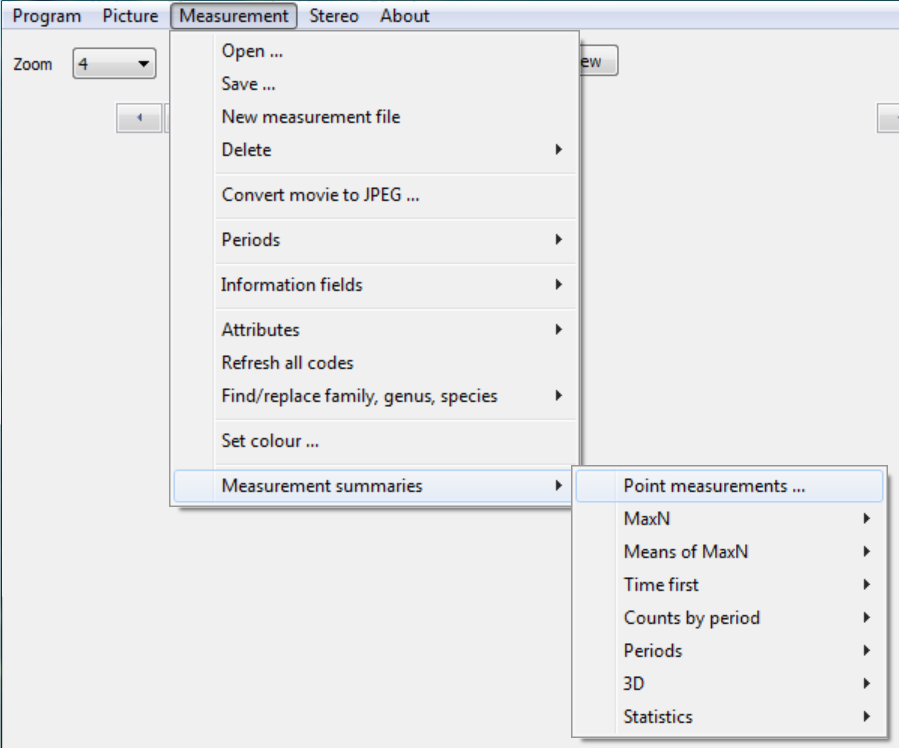
- सभी घुमावों के बाद गणना की गई है, ' माप ' > ' माप सारांश ' > ' पॉइंट माप ' पर नेविगेट करके 2d अंक निर्यात करें और एक. txt फ़ाइल के रूप में 2d अंक बचाएं ।
- सहेजी गई 2d. txt बिंदु फ़ाइल को स्प्रेडशीट के रूप में खोलें और ' संमिलित करें ' > ' PivotTable ' पर नेविगेट करके counts (तालिका 1) को सारांशित करने के लिए प्रजातियों बनाम घुमाव संख्या की एक pivottable बनाएं । का चयन करें "जीनस और प्रजातियों ' के लिए ' पंक्ति लेबल ', और ' अवधि ' के लिए ' कॉलम लेबल ' ।
- उस प्रजाति के व्यक्तियों की सबसे बड़ी संख्या है कि कैमरा रोटेशन का चयन करके प्रत्येक प्रजाति के लिए MaxN चुनें (तालिका 1) ।
- जीनस के लिए केवल पहचान की मछलियों के लिए, कि विशेष जीनस में प्रजातियों को पहचान व्यक्तियों की सबसे बड़ी संख्या थी रोटेशन के आधार पर एक जीनस स्तर MaxN का चयन करें ।
नोट: यह कदम केवल उच्च वर्गीकरण समूहों (जैसे, केवल जीनस या परिवार के लिए) को पहचाने गए थे कि व्यक्तिगत मछली गिनती से बचने के लिए मदद करता है. उदाहरण के लिए, तालिका 1में, ' रोटेशन 1 ' में 10 अज्ञात Sebastes एसपीपी. और प्रजातियों को पहचाने जाने वाले जीनस Sebastes के ३३ सदस्य शामिल हैं, जबकि ' रोटेशन 3 ' में केवल दो अज्ञात Sebastes एसपीपी हैं । और ४३ सदस्य जीनस प्रजातियों को पहचान Sebastes । इसलिए ' रोटेशन 3 ' अज्ञात Sebastes एसपीपी के MaxN गिनती के लिए इस्तेमाल किया जाएगा । इस तरह से रूढ़िवादी धारणा बनी है कि ८ में से अज्ञात Sebastes एसपीपी. ' रोटेशन १ ' में ' रोटेशन ८ ' की पहचान की गई. - यदि एकाधिक घुमाव एक दिया प्रजातियों के लिए एक ही MaxN गिनती है, 3 डी बिंदु माप के लिए MaxN के साथ पहली रोटेशन का चयन करें ।
- प्रत्येक प्रजाति के लिए, MaxN हुआ है कि रोटेशन में मछली की 3d माप ले ।
- 3 डी माप के लिए सटीक एक ही मछली के लिए नेविगेट करने के लिए कदम २.१-२.३ में एकत्र बचाया 2d अंक का उपयोग करें ।
- बेहतर मछली थूथन और caudal पंख (चित्रा 3) के किनारों की नोक की पहचान करने के लिए कम से अधिक 4x में ज़ूम करें ।
नोट: यह एक 3 डी माप के लिए मछली का सबसे अच्छा अभिविन्यास खोजने के लिए कदम आगे या पीछे फ्रेम करने के लिए आवश्यक हो सकता है. ' बेस्ट ' ओरिएंटेशन एक है, जहां दोनों कैमरों में caudal पंख के थूथन और किनारों दिखाई दे रहे हैं । - मैंयुअल रूप से थूथन की नोक पर क्लिक करें, तो बाएं कैमरे में पूंछ के किनारे, तो सही वीडियो में एक ही क्रम में चयन दोहराएं ।
- ड्रॉपडाउन मेनू से सही प्रजातियों की पहचान का चयन के रूप में 2.2.1 में किया गया था ।
- यदि एक 3 डी लंबाई माप संभव नहीं है, उदाहरण के लिए अगर सिर और मछली की पूंछ दोनों कैमरों में दिखाई नहीं दे रहे हैं, तो एक 3 डी बिंदु के बजाय छोड़ दिया और सही वीडियो दोनों में मछली की एक ही स्थिति को क्लिक करके निशान । पहले के रूप में जानकारी क्षेत्रों भरें और टिप्पणी छोड़ "लंबाई माप से बाहर" ।
नोट: MaxN विभिन्न प्रजातियों के लिए कैमरों के विभिन्न घुमाव पर हो सकता है; हालांकि, किसी भी दी गई प्रजातियों के लिए, माप केवल एक रोटेशन (तालिका 1) में होने चाहिए ।
- सभी मछलियों के लिए 3 डी माप पूरा करने के बाद, आगे विश्लेषण के लिए. txt फ़ाइल के रूप में डेटा निर्यात.
- नेविगेट करने के लिए ' माप ' > ' माप सारांश ' > ' 3d बिंदु और लंबाई माप ', और निर्यात करने के लिए. txt फ़ाइल सहेजें ।
3. ९५% Z प्रजातियों के लिए दूरस्थ प्रक्रिया-विशिष्ट सर्वेक्षण क्षेत्रों
नोट: ९५% Z दूरी की औसत दूरी एक प्रजाति मज़बूती से एक दिए गए अध्ययन में पहचाना जा सकता है, जबकि पानी स्पष्टता या प्रकाश व्यवस्था की असाधारण स्थितियों के मामलों को छोड़कर का अनुमान है । इस गणना खाते में एक दिया अध्ययन के लिए औसत समुद्र शर्तों लेता है और फिर से एक नए अध्ययन के लिए गणना की आवश्यकता होगी ।
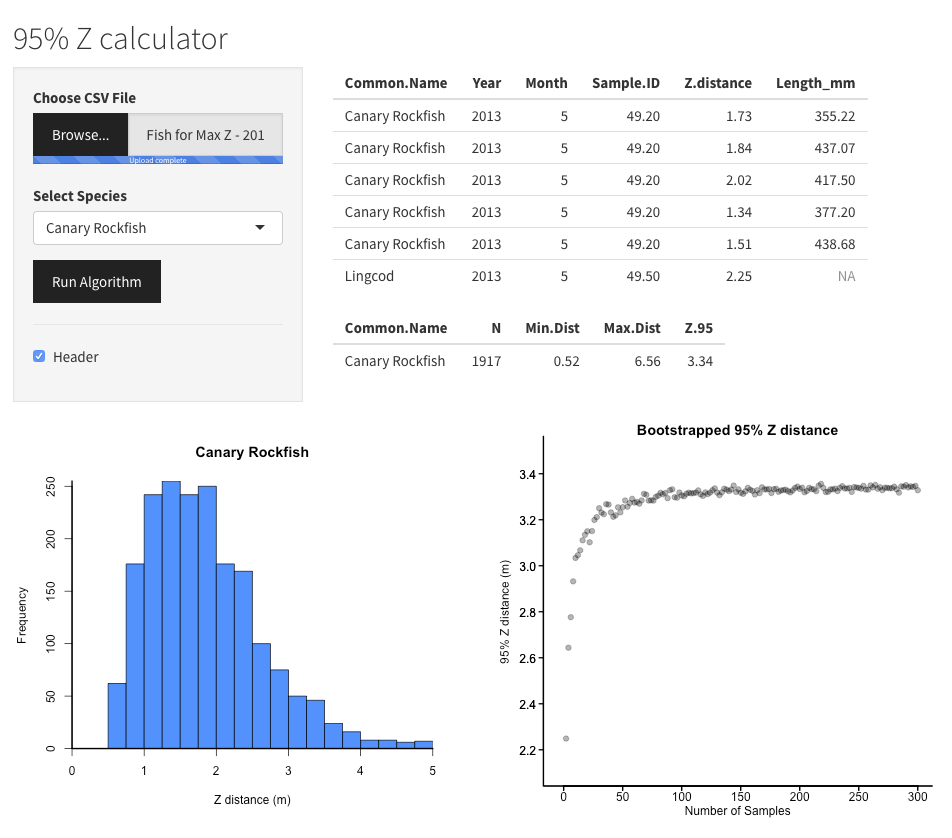
- नमूना आकार प्रत्येक प्रजातियों के लिए विश्वसनीय पता लगाने की दूरी को चिह्नित करने के लिए काफी महान है, तो यह निर्धारित करने के लिए सरल bootstrapping का प्रयोग करें ।
- प्रत्येक नमूना आकार वर्ग के लिए (उदा., 5 मछली के नमूना आकार डिब्बे), नमूना जनसंख्या से प्रतिस्थापन के साथ चयनित नमूना आकार के १,००० यादृच्छिक ड्रॉ ले और इन १,००० ड्रॉ की दूरी का मतलब ९५% quantile की गणना, और साजिश के परिणामस्वरूप asymptotic वक्र । पूरक फ़ाइलों में दिया गया कोड देखें 1 & 2।
- सत्यापित करें कि पर्याप्त नमूने नमूना आकार बढ़ाने के साथ ९५% Z दूरी asymptote के साथ वास्तविक नमूना आकार की तुलना करके प्राप्त किए गए थे ।
- गणना के ९५% quantile के रूप में ९५% Z दूरी मूल्य की दूरी से कैमरे के सभी सर्वेक्षण में एक प्रजाति के लिए मापा ।
- प्रत्येक ९५% Z मान का उपयोग कर प्रजातियों के लिए सर्वेक्षण प्रभावी क्षेत्र की गणना ।
नोट: एक घूर्णन भूमि के मामले में, ९५% Z मान एक सर्वेक्षण घास के बाहरी त्रिज्या का प्रतिनिधित्व करता है, भीतरी त्रिज्या उपकरण के भौतिक सेटअप द्वारा निर्धारित के साथ और कैसे बेस के पास कैमरे का निरीक्षण करने में सक्षम हैं । के रूप में लैंडर घूमता है, एक ' डोनट ' आकार का सर्वेक्षण क्षेत्र का गठन (चित्रा 4) है ।- इस रूप में सर्वेक्षण क्षेत्र परिकलित करें:

नोट: उदाहरण के लिए, एक अपेक्षाकृत बड़ी प्रजातियों जैसे Yelloweye Rockfish (Sebastes ruberrimus) में ३.३ m की ९५% Z दूरी और एक प्रभावी सर्वेक्षण क्षेत्र ३०.९ m2 के प्रति भूमिहीन तैनाती: ३४.३ m2 (बाहरी सर्कल)-३.४ एम2 (इनर वृत्त) = ३०.९ m2 (कुल सर्वेक्षण क्षेत्र) ।
- इस रूप में सर्वेक्षण क्षेत्र परिकलित करें:
- परिकलित क्षेत्र का सर्वेक्षण (3.3.1 चरण) का उपयोग करके, प्रत्येक दृश्य सर्वेक्षण समीकरण का उपयोग करने के लिए घनत्व अनुमान में व्यक्तिगत प्रजातियों की गिनती (MaxN) परिवर्तित:

नोट: एक समान प्रक्रिया एक आरईएल घनत्व के बजाय एक volumetric घनत्व की गणना करने के लिए इस्तेमाल किया जा सकता है; हालांकि, वह प्रक्रिया यहां वर्णित नहीं है ।



तालिका 1: उदाहरण MaxN सारांश तालिका. प्रत्येक प्रजातियों के लिए MaxN के चयन लाल और बोल्ड पाठ के साथ प्रदर्शन किया है । ध्यान दें कि अज्ञात Sebastes एसपीपी. के लिए एक रूढ़िवादी MaxN सबसे प्रजातियों को पहचाना Sebastes (रोटेशन 3) के साथ रोटेशन द्वारा निर्धारित किया गया था । इसके अलावा, जबकि इस अध्ययन में आठ कैमरा घुमावों का इस्तेमाल किया, केवल चार rotations सादगी के लिए 1 तालिका में प्रदर्शित कर रहे हैं । MaxN का चयन करने के लिए प्रक्रिया के समान घुमाव की संख्या की परवाह किए बिना है ।

चित्रा 1: स्टीरियो वीडियो लैंडर. कुंजी हार्डवेयर गिने है (1) ३०० मीटर नाल, (2) दो डिजिटल वीडियो रिकार्डर (DVR) हटाने योग्य 32gb भंडारण कार्ड पनरोक बोतल के अंदर के साथ, (3) दो एलईडी रोशनी ५,००० K का एक रंग तापमान पर ३,००० लुमेन लगाने, और (4) ६२० टीवी लाइन (TVL) संकल्प के साथ दो कैमरों । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।

चित्रा 2: अंशांकन घन (५०० मिमी x ५०० मिमी x ३०० मिमी). एक अंशांकन का उदाहरण दो अलग झुकाव में दिखाया गया एक ' अंशांकन घन ' के साथ: (क) घन के दाईं ओर कैमरों की ओर बाहर धकेल दिया है, और (ख) घन का चेहरा कैमरों के चेहरे के समानांतर है । लाल डॉट्स इस विशेष अंशांकन पद्धति में प्रयुक्त संदर्भ बिंदुओं को निरूपित करते हैं और हमेशा क्रमांकित क्रम में पहचाने जाने चाहिए. कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।

चित्रा 3: 3 डी माप Sebastes miniatusपर रखा. थूथन और पूंछ के अंत की नोक प्रत्येक कैमरा फ्रेम में पहचान के लिए स्टीरियो माप के लिए अनुमति दी गई । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।

चित्रा 4: क्षेत्र भूमिक उपकरण द्वारा सर्वेक्षण किया । प्रभावी क्षेत्र के लिए भूमिक उपकरण द्वारा सर्वेक्षण किया गया था न्यूनतम जेड दूरी से घिरा हुआ है, और प्रत्येक प्रजाति के लिए ९५% जेड दूरी. ध्यान दें कि इस क्षेत्र में एक ' डोनट ' आकार का सर्वेक्षण मात्रा के आसपास भूमिर बनाया है । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
२०१३ और २०१४ के बीच, हम घूर्णन स्टीरियो-वीडियो लैंडर (चित्रा 1) केंद्रीय कैलिफोर्निया तट के साथ और एकत्र MaxN और ९५% जेड दूरी (चित्रा 4) 20 से अधिक प्रजातियों पर डेटा के साथ ८१६ सर्वेक्षणों का आयोजन किया । वहाँ प्रजातियों में से प्रभावी पता लगाने की सीमा में स्पष्ट पैटर्न मनाया, प्रजातियों के आकार, आकार, और रंगाई की बातचीत के कारण की संभावना (चित्रा 5) थे. उदाहरण के लिए, ध्वज Rockfish (Sebastes rubrivinctus) की तुलना आकार की अन्य प्रजातियों की तुलना में अधिक दूरी पर विश्वास की पहचान के लिए अनुमति देने वाले इसके पक्षों पर अलग बैंडिंग है । इसी तरह, कैनरी Rockfish (Sebastes pinniger) अपेक्षाकृत बड़े शरीर हैं, लेकिन एक रंजकता है कि अन्य प्रजातियों के समान है, इस प्रकार इसे और अधिक दूरी (चित्रा 5) की पहचान करने के लिए मुश्किल बना रही है.
हम दोनों MaxN और ९५% Z दूरी मान: क़द Rockfish (Sebastes wilsoni) और Lingcod (ओ. elongatus) की गणना प्रदर्शित करने के लिए दो प्रजातियों का उपयोग करें । पूर्व एक छोटे शरीर मछली है कि दूरी पर पहचान करने के लिए मुश्किल हो सकता है; जबकि ओ. elongatus अपेक्षाकृत बड़ा है, एक अलग आकार है, और अधिक आसानी से पहचाने जाने योग्य है । के लिए २०१३-२०१४, १,१९१ मापन के लिए एस. wilsoni और १,२२२ माप के लिए ओ elongatus एकत्र किए गए. फिर, ९५% quantiles दूरी जिस पर इन प्रजातियों में देखा गया था: ९५% Z दूरी के लिए २.६५ मीटर थे एस. wilsoni और ३.९६ के लिए एम ओ elongatus (चित्रा 5) की गणना की गई । ये ९५% Z दूरी एस. wilsoni और ओ. elongatus के लिए क्रमशः १८.६ m2 और ४६.० m2 के प्रभावी सर्वेक्षण क्षेत्रों में अनुवाद । एक साधारण बूटस्ट्रैप विश्लेषण की पुष्टि की है कि पर्याप्त नमूना आकार ९५% Z दूरी मूल्यों के लक्षण वर्णन के लिए प्राप्त किया गया । दोनों प्रजातियों के लिए, ९५% Z दूरी के अनुमान को स्थिर जब से अधिक ५० इन प्रजातियों युक्त सर्वेक्षण नमूना थे, मजबूत सबूत है कि चुना नमूना आकार के लिए पर्याप्त से अधिक थे प्रदान करने के लिए प्रभावी भूमि का नमूना क्षेत्र की विशेषताएं इन प्रजातियों (चित्रा 6) ।
सर्वेक्षण के अनुसार MaxN मायने रखता है तो घनत्व में बदल रहे थे (मछली की संख्या/ हम ८१६ सर्वेक्षण से घनत्व का अनुमान का इस्तेमाल किया परिकल्पना है कि Lingcod और क़द Rockfish मुख्य रूप से उच्च राहत निवास पर मनाया जाएगा परीक्षण । दोनों प्रजातियों के लिए, कम राहत निवास के साथ तुलना में उच्च और मध्यम राहत पर काफी अधिक घनत्व थे (Kruskal-वालिस, p < <. 001; चित्र 7) । इन परिणामों के साथ संगत थे पहले से बताया दोनों प्रजातियों के लिए पर्यावास संघों15। किसी भी प्रजाति के लिए मध्यम और उच्च राहत आवास के बीच कोई अंतर नहीं थे ।
समझने के लिए कैसे घूर्णन लैंडर पारंपरिक स्टेशनरी कैमरा सिस्टम के साथ तुलना में, हम एक घूर्णन और एक नकली स्थिर भूमिर के बीच घनत्व और परिवर्तनशीलता के अनुमान में अंतर का अनुमान है । हम एक विशिष्ट स्टेशनरी एकल कैमरा लैंडर एक ९०-देखने के डिग्री क्षेत्र होगा ग्रहण किया । घूर्णन लैंडर देखने की एक ६० डिग्री क्षेत्र है, और एक ९० डिग्री देखने को पूरा करने के लिए रोटेशन के 5 सेकंड की आवश्यकता है । २६१ सर्वेक्षण का उपयोग कर, हम MaxN स्थापित करने के लिए जमीनी घुमाव के मध्य 5 सेकंड से मछली अवलोकन डेटा का चयन किया. छद्म स्थिर भूमि के लिए घनत्व का अनुमान के कवरेज के कम क्षेत्रों का उपयोग करके मानकीकृत किया गया (यानी, लगभग ¼ घूर्णन भूमि के क्षेत्र) । मतलब घनत्व में अंतर और घूर्णन और छद्म स्थिर भूमि के बीच भिंनता के गुणांक है वेल्च टी परीक्षण के साथ मूल्यांकन किया गया । मतलब घनत्व घूर्णन कैमरा द्वारा प्राप्त 18% स्थिर कैमरों (वेल्च s t२१.७, p = ०.०८१, चित्रा 8ए) के साथ प्राप्त की तुलना में अधिक थे । साथ ही, भिन्नता का गुणांक रोटेटिंग कैमरे (वेल्च s t१५.१, p < 0.001, चित्रा 8) की तुलना में स्थिर कैमरा के साथ १.८ गुना अधिक था ।

चित्र 5 : Z दूरियां चुनिंदा प्रजातियों के लिए मनाया । लाल ऊर्ध्वाधर सलाखों के छोड़ दिया और सही पर ९५% z दूरी मूल्य पर ंयूनतम z दूरी (कैमरों से ०.८१ मीटर) निरूपित । ध्यान दें कि यह प्रत्येक प्रजाति के लिए भूमि के आसपास औसत प्रभावी सर्वेक्षण क्षेत्र का प्रतिनिधित्व करता है । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।

चित्र 6 : Bootstrapped Z दूरी मान. Bootstrapping (A) S. wilsoni और (B) O. elongatus प्रेक्षणों के लिए नमूना आकार बढ़ाने के लिए । नमूना 3-300 से लेकर आकार bootstrapped १,००० बार प्रत्येक मतलब ९५% Z दूरी की गणना करने के लिए और नमूना आकारों की जांच कर रहे थे पर्याप्त थे । ध्यान दें कि y-अक्ष मानों की श्रेणी २.०-२.६ m से S. wilsoni के लिए है और O. elongatus के लिए २.६-४.० m से । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।

चित्र 7 : दो चुनिंदा प्रजातियों के लिए पर्यावास अंतर । (ए) के औसत घनत्व (± SE) एस wilsoni और (बी) ओ. elongatus कम, मध्यम, और उच्च राहत रॉक वास पर मापा । कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।

चित्र 8 : घूर्णन और छद्म स्थिर भूमिहीनों के बीच मतभेद । के दोनों अनुमान (एक) मतलब घनत्व (मछलियों/एम2 ± एसई) और (बी) भिन्नता का गुणांक मतलब (CV) २६१ सर्वेक्षण के लिए ± एसई प्रस्तुत कर रहे हैं. कृपया यहां क्लिक करें इस आंकड़े का एक बड़ा संस्करण को देखने के लिए ।

अनुपूरक वीडियो 1: अंशांकन सत्यापन । अंशांकन अलग दूरी पर ज्ञात आकारों के लक्ष्य को मापने के द्वारा क्षेत्र में उपयोग करने से पहले सत्यापित किया जा सकता है । इस वीडियो को देखने के लिए कृपया यहां क्लिक करें । (डाउनलोड करने के लिए राइट-क्लिक करें.)

अनुपूरक वीडियो 2: पानी के नीचे सर्वेक्षण फुटेज । इस वीडियो को देखने के लिए कृपया यहां क्लिक करें । (डाउनलोड करने के लिए राइट-क्लिक करें.)
Subscription Required. Please recommend JoVE to your librarian.
Discussion
पारंपरिक MaxN मीट्रिक एक सर्वेक्षण के दौरान उपस्थित व्यक्तियों की एक गारंटी ंयूनतम संख्या की गिनती के विचार पर predicated है । यदि मछली की एक निश्चित संख्या एक साथ एक वीडियो फ्रेम में दिखाई दे रहे हैं, वहां किसी भी कम उपस्थित नहीं हो सकता है, लेकिन क्योंकि मछली मोबाइल और विषम वितरित कर रहे हैं, एक ही वीडियो फ्रेम के दौरान सभी व्यक्तियों को एक साथ देखने की संभावना कम है . इसलिए यह संभावना है कि पारंपरिक MaxN सच मछली बहुतायत16,17आंक । इसके अतिरिक्त, यह है कि पारंपरिक MaxN प्रदर्शन कर सकते है प्रदर्शन किया गया है रैखिक नकारात्मक-बढ़ती मछली बहुतायत16,18के साथ पक्षपातपूर्ण रिश्ते । यह गियर संतृप्ति की घटना से संबंधित हो सकता है जिससे सापेक्ष बहुतायत सूचकांक बहुतायत19,20में सच बढ़ जाती है का पता लगाने में विफल । इसके विपरीत, वास्तव में गिरावट मछली बहुतायत के साथ एक सूचकांक के स्पष्ट स्थिरता ' hyperstability ', और अंत में मछली की दुर्घटना के लिए नेतृत्व कर सकते है ' शब्द है21,22आबादी । एक ताजा अध्ययन में बताया गया है कि MaxN में अस्थिरता को देखते हुए16के सर्वेक्षण क्षेत्र में वृद्धि से समाप्त किया जा सकता है । उस अध्ययन में, MaxN और सच बहुतायत के बीच संबंध को देखने के क्षेत्र के रूप में तेजी से रैखिक हो गया १००% (यानी, ३६० डिग्री) से संपर्क किया ।
स्थिर कैमरा सिमुलेशन से परिणाम इन पिछले परिणामों के साथ अनुरूपता संकेत मिलता है, और सुझाव है कि MaxN मूल्य बेहतर मछली बहुतायत विशेषताएं हो सकता है । उदाहरण के लिए, छद्म स्थिर भूमिक के साथ तुलना में घूर्णन भूमि से व्युत्पंन घनत्व अनुमान के बीच प्रसरण का अनुमानित माध्य गुणांक कम किया गया था । इस तथ्य यह है कि मछली विषम रूप से वितरित कर रहे है के कारण की संभावना है, और है कि स्थिर कैमरों और अधिक ' याद आती है ' मछली वर्तमान अगर लैंडर गलत दिशा चेहरे की संभावना है । घूर्णन भूमि के उपकरण के आसपास पूर्ण ३६० डिग्री सर्वेक्षण द्वारा नमूना प्रयास अधिकतम, और शुद्ध प्रभाव दोनों नमूना लागत और विचरण करने के लिए कटौती है, और अध्ययन के सांख्यिकीय शक्ति में एक समग्र वृद्धि हुई है । भविष्य के अध्ययन को बेहतर सीधे एक अलग स्टेशनरी के साथ एक घूर्णन भूमि का परीक्षण एक जोड़ा सर्वेक्षण डिजाइन में इस मुद्दे को संबोधित कर सकता है । इसी तरह, हम इस अध्ययन में MaxN और सच बहुतायत के बीच संबंध के लिए सीधे परीक्षण करने में असमर्थ थे, और भविष्य के अध्ययनों से सीधे यह या तो सिमुलेशन या नियंत्रित वातावरण का उपयोग कर परीक्षण कर सकते हैं, के रूप में कैंपबेल में किया गया था (२०१५)16।
संशोधित MaxN दृष्टिकोण की एक संभावित आलोचना डबल गिनती व्यक्तियों की संभावना है । क्योंकि भूमिर प्रति मिनट एक पूर्ण रोटेशन बनाया है, और पारिस्थितिकी तंत्र में ब्याज की benthic प्रजातियों के लिए अपेक्षाकृत गतिहीन और सबसे शर्तों के तहत धीमी गति से चलती हैं, हम मानते है कि डबल गिनती के जोखिम कम था । इसके अतिरिक्त, मामलों जहां मछली या प्रवेश करेंगे आठ rotations के पाठ्यक्रम पर सर्वेक्षण क्षेत्र छोड़ मनाया गया । अज्ञात प्रजातियों की गिनती करने के लिए किसी दिए गए जीनस के व्यक्तियों की सबसे बड़ी संख्या के साथ रोटेशन का उपयोग कर के रूप में इस तरह के दोहरे गिनती से बचने के लिए अतिरिक्त सावधानियों लिया गया । अंय मेट्रिक्स मछली बहुतायत के सूचकांक जैसे मतलब गिनती के रूप में प्रस्तावित किया गया है; हालांकि, ये भी लगातार सच बहुतायत को नजरअंदाज करते हुए दिखाया गया है, जबकि घनत्व के बीच परिवर्तनशीलता में वृद्धि16का अनुमान है । MaxN इसलिए मछली बहुतायत के एक अधिक सटीक मीट्रिक के रूप में सिफारिश की है । जबकि हमारे संशोधित MaxN मीट्रिक व्यक्तियों की निरपेक्ष ंयूनतम संख्या का एक रूढ़िवादी अनुमान गारंटी नहीं है, हम समग्र विश्वास है कि इस संशोधित MaxN दृष्टिकोण सच मछली बहुतायत का बेहतर अनुमान प्रदान करता है, और है कि अधिक गिनती मछली की है अपेक्षाकृत कम चिंता ।
कई पक्ष देखने वीडियो-transect सर्वेक्षण सभी प्रजातियों के लिए घनत्व का अनुमान लगाने के लिए एक निश्चित transect चौड़ाई का उपयोग करें । इसी तरह, स्टीरियो-वीडियो भूमिहीनों का उपयोग करने के लिए एक दृष्टिकोण दोनों क्षेत्र सर्वेक्षण और मछली घनत्व की गणना करने के लिए कैमरे से एक अधिकतम दूरी का उपयोग करने के लिए किया जाएगा. दोनों प्रजातियों में से एक को कम करने के लिए नेतृत्व कर सकते है जो केवल मज़बूती से निश्चित transect चौड़ाई अनुमान से छोटी दूरी के लिए पहचाने जाते है23। दूरी के लिए जो एक प्रजाति मज़बूती से पहचाना जाता है ऐसे आकार, आकार, रंगाई पैटर्न, मछली व्यवहार, के रूप में के रूप में अच्छी तरह से पर्यावरणीय कारकों के रूप में कारकों की बातचीत के कारण होता है । ९५% Z दूरी विधि विशेष रूप से लाभप्रद है कि यह इन सभी कारकों की बातचीत के लिए एक साथ खाते हैं । उदाहरण के लिए, ओ. elongatus प्रजाति है कि हम सबसे बड़ी दूरी की पहचान करने में सक्षम हैं, अपनी अलग, बड़े, बढ़ाव शरीर के आकार और व्यवहार की प्रवृत्ति का एक परिणाम के रूप में की संभावना को seafloor पर रखना था । गुलाबी Rockfish (Sebastes rosaceus) सबसे कम Z दूरी में से एक था, की संभावना है, क्योंकि, Sebastomus उपजाति के एक सदस्य के रूप में, यह कई congeners है कि बहुत समान लग रही है और वृद्धि की दूरी पर भेद करना मुश्किल है । प्रजातियों के लिए अनुमति देने के विशिष्ट क्षेत्रों द्वारा सर्वेक्षण भूमि के लिए, हम और अधिक सही मछली बहुतायत अनुमान करने में सक्षम हो सकता है । नमूना आकार सत्यापन के लिए बूटस्ट्रैप दृष्टिकोण सरल और आसानी से अन्य सर्वेक्षण में लागू किया गया है, और हमें विश्वास है कि ९५% Z दूरी की विधि आगे लाइन transect सर्वेक्षण डिजाइन को समायोजित करने के लिए अनुकूलित हो सकता है. ९५% Z दूरी तो पनडुब्बी या दूर से संचालित वाहन (आरओवी) उपकरण के साथ मनाया प्रजातियों के लिए विश्वसनीय का पता लगाने की एक क्षैतिज दूरी का प्रतिनिधित्व करेंगे । भविष्य में, शोधकर्ताओं ने दूरी नमूना सिद्धांत का उपयोग कर सकते हैं की जांच के रूप में मॉडल घनत्व के लिए एक समारोह के रूप में दूरस्थ23,24.
वहां के रूप में नहीं, मत्स्य पालन प्रबंधन25,26,27में भंडार का अधिक से अधिक उपयोग है, वहां गैर निकालने नमूना तकनीकों के लिए एक बढ़ती जरूरत है, विशेष रूप से गहरे पानी के निवास में गोताखोर के लिए सुलभ नहीं है सर्वेक्षण. हालांकि, यह भी आवश्यक है कि उन तकनीकों मछली लंबाई, बहुतायत पर सटीक, विश्वसनीय डेटा प्रदान करते हैं, और प्रजातियों की संरचना । वीडियो भूमिहीनों एक अपेक्षाकृत नए निगरानी उपकरण है कि एक कम लागत है, अवसर के अपेक्षाकृत छोटे जहाजों पर संचालित किया जा सकता है, और ROVs और पनडुब्बियों से संचालित करने के लिए रसद सरल कर रहे हैं, जबकि कम कुशल कर्मियों की आवश्यकता होती है । हालांकि इन तरीकों में चर्चा की नहीं, स्टीरियो कैमरा भूमिहीनों 2% से कम त्रुटि के साथ सटीक लंबाई माप के लिए सक्षम हैं. इसके अतिरिक्त, भूमिहीनों को तेजी से बड़े भौगोलिक क्षेत्रों पर तैनात किया जा सकता है, सांख्यिकीय अनुमान में वृद्धि । हम वीडियो निगरानी उपकरण में ब्याज की उंमीद को बढ़ाने के रूप में अनुसंधान एजेंसियों के लिए बजट को कसने और अधिक कुशलता से नमूना प्रयास फैला देखो । MaxN और ९५% Z दूरी के हमारे संशोधन भविष्य पर्यावरण घूर्णन वीडियो भूमिहीनों का उपयोग अध्ययन में विचार किया जाना चाहिए ।
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
लेखकों का खुलासा करने के लिए कुछ नहीं है
Acknowledgments
यह काम प्रकृति संरक्षण और निजी दाताओं, संसाधन विरासत कोष फाउंडेशन, गॉर्डन और बेट्टी मूर फाउंडेशन, पर्यावरण रक्षा कोष, कैलिफोर्निया सागर अनुदान कार्यक्रम, NMFS राष्ट्रीय सहकारी अनुसंधान कार्यक्रम, और एक NOAA द्वारा वित्त पोषित किया गया Saltonstall-कैनेडी अनुदान #13-SWR-008. मरीन एप्लाइड अनुसंधान और अंवेषण (कटार Rosen, रिक बोटमैन, एंडी Lauerman, और डेविड जेफ्रीज) विकसित, निर्माण और वीडियो जमीनी उपकरण बनाए रखा । हम तकनीकी सहायता के लिए जिम Seager और SeaGIS ™ सॉफ्टवेयर का शुक्र है । कप्तान और वाणिज्यिक मछुआरे टिम Maricich और चालक दल पर एफ/वी डोना कैथलीन 2012-2015 से जमीनी की तैनाती में सहायता प्रदान की । तुम सब जो वीडियो डेटा संग्रह या विश्लेषण (ऐनी Tagini, डोना Kline, लेफ्टिनेंट एंबर पायने, Bryon डाउनी, Marisa पोंटे, रेबेका मिलर, मैट Merrifield, वाल्टर मादक, स्टीव Rienecke, EJ डिक, और जॉन फील्ड) में भाग लेने के लिए धंयवाद ।
Materials
| Name | Company | Catalog Number | Comments |
| calibration cube | SeaGIS | http://www.seagis.com.au/hardware.html | 1000x1000x500 mm is the preferred dimensions. Other methods of calibration are available. |
| CAL calibration software | SeaGIS | http://www.seagis.com.au/bundle.html | |
| EventMeasure stereo measurement software | SeaGIS | http://www.seagis.com.au/event.html | |
| Statistical software | R Core Team 2017 (v. 3.4.0) | Bootstrapping code can be found: https://github.com/rfields2017/JoVE-Bootstrap-Function | |
| Spreadsheet Software | Microsoft Excel | ||
| 2 waterproof cameras | Deep Sea Power and Light | HD quality preferred | |
| 2 depth rated, waterproof lights | Deep Sea Power and Light : 3000 lumen LED with 5000k color temperature | ||
| DVR recorder | Stack LTD DVR | ||
| standard PC | Windows 10 preferred OS | ||
| rotating Lander platform | Marine Applied Research and Engineering (MARE) |
References
- Love, M. S., Yoklavich, M. M., Thorsteinson, L. K. The Rockfishes of the Northeast Pacific. , University of California Press. Berkley. (2002).
- Laidig, T. E., Watters, D. L., Yoklavich, M. M. Demersal fish and habitat associations from visual surveys on the central California shelf. Estuar. Coast. Shelf Sci. 83 (4), 629-637 (2009).
- Anderson, T. J., Yoklavich, M. M. Multiscale habitat associations of deepwater demersal fishes off central California. Fish. Bull. 105 (2), 168-179 (2007).
- Yoklavich, M. M., Cailliet, G. M., Sullivan, D. E., Lea, R. N., Love, M. S. Habitat associations deep-water rockfishes a submarine canyon an example of a natural refuge. Fish. Bull. 98 (3), 625-641 (2000).
- Status of the Pacific Coast Groundfish Fishery, Stock Assessment and Fishery Evaluation. , Pacific Fishery Management Council. Portland, OR. (2016).
- Cappo, M., Harvey, E., Malcolm, H., Speare, P. Potential of video techniques to monitor diversity, abundance and size of fish in studies of marine protected areas. Aquatic protected areas- What works best and how do we know. Beumer, J. P., Grant, A., Smith, D. C. , Proc. World Congr. on Aquat Protected Areas. Australian Soc. for Fish Bio. North Beach, Western Australia. 455-464 (2003).
- McLean, D. L., Green, M., Harvey, E. S., Williams, A., Daley, R., Graham, K. J. Comparison of baited longlines and baited underwater cameras for assessing the composition of continental slope deepwater fish assemblages off southeast Australia. Deep-Sea Research Part I: Oceanographic Research Papers. 98, 10-20 (2015).
- Parker, D., Winker, H., et al. Insights from baited video sampling of temperate reef fishes: How biased are angling surveys. Fish. Res. 179, 191-201 (2016).
- Boutros, N., Shortis, M. R., Harvey, E. S. A comparison of calibration methods and system configurations of underwater stereo-video systems for applications in marine ecology. Limnol. Oceanogr. Methodss. 13 (5), 224-236 (2015).
- Harvey, E. S., Cappo, M., Butler, J. J., Hall, N., Kendrick, G. A. Bait attraction affects the performance of remote underwater video stations in assessment of demersal fish community structure. Mar. Ecol. Prog. Ser. 350, 245-254 (2007).
- Watson, J. L., Huntington, B. E. Assessing the performance of a cost-effective video lander for estimating relative abundance and diversity of nearshore fish assemblages. J. Exp. Mar. Bio. Ecol. 483, 104-111 (2016).
- Easton, R. R., Heppell, S. S., Hannah, R. W. Quantification of Habitat and Community Relationships among Nearshore Temperate Fishes Through Analysis of Drop Camera Video. Mar. Coast. Fish. 7 (1), 87-102 (2015).
- Hannah, R. W., Blume, M. T. O. Tests of an experimental unbaited video lander as a marine fish survey tool for high-relief deepwater rocky reefs. J. Exp. Mar. Bio. Ecol. 430, 1-9 (2012).
- Starr, R. M., Gleason, M. G., et al. Targeting Abundant Fish Stocks while Avoiding Overfished Species: Video and Fishing Surveys to Inform Management after Long-Term Fishery Closures. Plos One. 11 (12), 0168645 (2016).
- Love, M. S. Certainly more than you want to know about the fishes of the Pacific Coast: a postmodern experience. , Really Big Press. Santa Barbara, CA. (2011).
- Campbell, M. D., Pollack, A. G., Gledhill, C. T., Switzer, T. S., DeVries, D. A. Comparison of relative abundance indices calculated from two methods of generating video count data. Fish. Res. 170, 125-133 (2015).
- Cappo, M., Speare, P., De'ath, G. Comparison of baited remote underwater video stations (BRUVS) and prawn (shrimp) trawls for assessments of fish biodiversity in inter-reefal areas of the Great Barrier Reef Marine Park. J. Exp. Mar. Bio. Ecol. 302 (2), 123-152 (2004).
- Schobernd, Z. H., Bacheler, N. M., Conn, P. B., Trenkel, V. Examining the utility of alternative video monitoring metrics for indexing reef fish abundance. Can. Jour. Fish. Aquat. Sci. 71 (3), 464-471 (2014).
- Hansen, M. J., Schorfhaar, R. G., Selgeby, J. H. Gill-Net Saturation by Lake Trout in Michigan Waters of Lake Superior. North Am. J. Fish. Manag. 18 (4), 847-853 (1998).
- Dauk, P. C., Schwarz, C. J. Catch estimation in the presence of declining catch rate due to gear saturation. Biometrics. 57 (1), 287-293 (2001).
- Hilborn, R., Walters, C. J. Quantitative Fisheries Stock Assessment Choice, Dynamics and uncertainty. , Springer. Dordrecht. (1992).
- Erisman, B. E., Allen, L. G., Claisse, J. T., Pondella, D. J., Miller, E. F., Murray, J. H. The illusion of plenty: hyperstability masks collapses in two recreational fisheries that target fish spawning aggregations. Can. Jour. Fish. Aquat. Sci. 68, 1705-1716 (2011).
- Buckland, S. T., Anderson, D. R., Burnham, K. P., Laake, J. L. Distance Sampling: Estimating abundance of biological populations. , Chapman and Hill. London. (1993).
- Ronconi, R. A., Burger, A. E. Estimating seabird densities from vessel transects: Distance sampling and implications for strip transects. Aquat. Bio. 4 (3), 297-309 (2008).
- Caselle, J. E., Rassweiler, A., Hamilton, S. L., Warner, R. R. Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected areas Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected. Nat. Publ. Gr. , 1-14 (2015).
- Starr, R. M., Wendt, D. E., et al. Variation in Responses of Fishes across Multiple Reserves within a Network of Marine Protected Areas in Temperate Waters. Plos One. 10 (3), 0118502 (2015).
- Lester, S., Halpern, B., et al. Biological effects within no-take marine reserves: a global synthesis. Mar. Ecol. Prog. Ser. 384, 33-46 (2009).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}