

Summary
Nous décrivons une nouvelle méthode de comptage des poissons et estimer l’abondance relative (MaxN) et la densité des poissons à l’aide de rotation des systèmes de caméras stéréo-vidéo. Nous montrons également comment utiliser la distance de la caméra (distance Z) pour estimer la détectabilité propres à chaque espèce.
Abstract
L’utilisation de systèmes de caméra vidéo dans les études écologiques du poisson continue à gagner de traction comme méthode de mesure des longueurs de poissons et l’abondance de poissons estimation viable, non extractives. Nous avons élaboré et mis en place un outil de caméra stéréo-vidéo tournante qui couvre 360 degrés d’échantillonnage, ce qui maximise l’effort d’échantillonnage par rapport aux outils de caméra fixe. Diverses études ont détaillé la capacité des systèmes statiques, stéréo-appareil photo pour obtenir des mesures très exactes et précises des poissons ; ici, l’accent était sur le développement d’approches méthodologiques pour quantifier la densité des poissons à l’aide de systèmes de caméra rotative. La première approche était d’élaborer une modification de la métrique MaxN, qui est généralement un comte conservateur du nombre minimal de poissons observé sur une enquête de l’appareil photo. Nous redéfinissons MaxN pour être le nombre maximal de poissons observés dans toute rotation donnée du système de caméra. Lorsque les précautions sont prises pour éviter la double comptabilisation, cette méthode pour MaxN peut-être mieux refléter abondance réelle que celle obtenue à partir d’une caméra fixe. Deuxièmement, parce que la stéréo-vidéo permet aux poissons d’être mappé dans l’espace tridimensionnel, des estimations précises de la distance de huis-clos peuvent être obtenues pour chaque poisson. En utilisant le percentile 95 % de la distance observée de la caméra d’établir des zones spécifiques à l’espèce interrogés, nous tenir compte des différences dans la détectabilité des espèces tout en évitant la dilution des estimations de la densité en utilisant la distance maximale, qu'une espèce a été observée. Comptabilité pour cette gamme de détectabilité est essentielle d’évaluer l’abondance de poissons. Cette méthode facilitera l’intégration des outils de stéréo-vidéo en sciences appliquées et des contextes de gestion rotatifs.
Introduction
Le long de la côte Pacifique des États-Unis, plusieurs espèces importantes pour la pêche commerciale et récréative du poisson de fond (par exemple, le complexe de sébastes (Sebastes spp.) et la morue-lingue (Ophiodon elongatus)) sont fortement associées les habitats de haut-relief, fond dur1,2,3,4,5. Chute de stéréo-vidéo caméras est un outil non extractives intéressant à utiliser dans les habitats rocheux en raison de la relative facilité et la simplicité de fonctionnement. Une variété de systèmes de caméras stéréo-vidéo ont été développés et déployés dans l’hémisphère Sud, les eaux peu profondes des écosystèmes6,7,8,9,10, et récemment, goutte-caméras vidéo ont gagné traction comme un outil de gestion pour les environnements des récifs rocheux des eaux profondes le long de la côte du Pacifique11,12,13. Nous avons cherché à modifier ces conceptions existantes de la stéréo-appareil photo en utilisant un système de caméra stéréo-vidéo (ci-après dénommé « Lander ») pour mieux caractériser les populations de poissons en haut-relief dannées le long de la côte centrale du Pacifique (voir Table de Matériaux). L’atterrisseur utilisée était différente de celle des systèmes vidéo existants parce que les caméras ont été montés sur une barre centrale tournante, permettant un plein 360° de la couverture du plancher océanique à la goutte emplacement14. L’atterrisseur a effectué un tour complet par minute, ce qui nous a permis de caractériser l’abondance et la composition de la communauté d’un espace et atteindre le même niveau de puissance statistique avec des déploiements de Lander moins rapidement. (Voir Starr (2016)14 pour plus de précisions sur les détails de la configuration de l’atterrisseur). Des essais préliminaires dans le système d’étude a suggéré que huit rotations des caméras dans nos enquêtes ne suffisaient pas à caractériser la richesse et l’abondance des espèces. Cette détermination était effectuée par une observation de la Loi des rendements décroissants dans l’abondance des espèces et de la densité des poissons plus de gouttes plus longtemps. Il est recommandé qu’une étude pilote dont le temps de trempage plus long se dérouleraient dans tout nouveau système afin de déterminer le temps de trempage optimale pour une espèce donnée ou l’étude de l’écosystème.
À l’aide de caméras stéréo appariés, les deux enquête sur la superficie et densité de poissons absolue peut être calculée pour chaque enquête vidéo ; Cependant, l’utilisation des caméras en rotation a nécessité la modification des métriques de comte de poisson traditionnel. Systèmes vidéo fixes utilisent le plus souvent « MaxN » en tant que conservateur nombre de poissons sur un déploiement6,10. MaxN traditionnelle décrit le nombre maximal de poissons d’une espèce donnée observée ensemble dans une seule trame vidéo, afin d’éviter les doubles comptages un poisson qui a quitte et rentre en trame. MaxN a donc fait une estimation du nombre minimal des poissons connus pour être présents et peuvent sous-estimer le vrai poisson abondance6,10. La métrique MaxN a été redéfinie pour représenter le plus grand nombre de poissons dans chaque rotation complète des caméras.
La deuxième modification aux précédentes méthodes vidéo stéréo devait tenir compte du fait que les espèces de différentes tailles, couleurs, et formes qui présentent différentes distances maximales d’identification fiable. Par exemple, les grandes espèces comme o. elongatus ont une forme allongée distincte et fiable peuvent être identifiés à une distance beaucoup plus grande par rapport aux espèces petites et cryptiques comme le Squarespot sébaste (Sebastes hopkinsi). Ces différentes gammes maximales de détectabilité modifier la zone efficace échantillonnée par l’atterrisseur pour chaque espèce. Parce que les caméras stéréo permettent de placer chaque poisson dans un espace tridimensionnel avec un degré élevé de précision, on peut déterminer la distance entre les caméras que chaque poisson a été mesuré (c'est-à-direla « distance Z », le nom de l’axe des « z » qui est perpendiculaire à la ligne droite tirée entre les caméras). Pour chaque espèce, la distance au sein de laquelle 95 % de tous les individus ont été observés (ci-après « distance 95 % Z ») était censée être le rayon de la zone étudiée et a servi à calculer l’aire totale étudiée. Outre les caractéristiques propres à chaque espèce, identifiabilité est touchée par des facteurs environnementaux tels que la turbidité de l’eau. Parce que ces facteurs peuvent varier dans le temps et l’espace, il est important d’utiliser la statistique de 95 % Z uniquement dans son ensemble. Alors qu’il sera très précis pour les grands échantillons, toute une enquête individuelle peut varier dans la zone étudiée.
Le protocole détaillé ci-dessous fournit des indications sur comment créer et utiliser ces paramètres. Bien que l’objectif était de caractériser l’habitat rocheux en eaux profondes le long de la côte du Pacifique, la méthode décrite pour mis à jour le comte MaxN est facilement applicable à n’importe quel système de goutte-caméra rotative. Le nombre de rotations de caméra nécessaires pour caractériser les populations de poissons dépendra de la dynamique de l’écosystème local, mais la conceptualisation de la mis à jour le MaxN restera le même. De même, tandis que nous avons utilisé 3D logiciel photogrammétrique pour analyser la vidéo stéréo, les techniques décrites dans les présentes sont facilement appliqués dans l’ensemble des plates-formes logicielles, tant que la localisation précise des poissons dans un espace tridimensionnel est possible. En outre, l’approche de l’application d’une valeur de 95 % Z distance sont envisageables à l’avenir études avec stéréo-caméras pour tenir compte des gammes spécifiques à chaque espèce de détectabilité et de calculer plus précisément abondance de poisson.
Subscription Required. Please recommend JoVE to your librarian.
Protocol
Remarque : Les captures d’écran des étapes de logiciels sont inclus sous Forme de fichiers supplémentaires. Veuillez noter que les étapes du logiciel décrites ci-dessous sont spécifiques au logiciel choisi (voir la Table des matières). L’approche globale peut être étendue à n’importe quelle plate-forme de logiciel stéréo.
1. préparer des images stéréo-caméra pour l’analyse
Remarque : L’étalonnage à l’aide d’un cube de calibrage est recommandé. Un cube de calibration est un cadre en aluminium en trois dimensions précisément positionnée points en réfléchissant sur la surface. Lorsqu’il est utilisé en conjonction avec le logiciel de calibration, un cube de calibration conduit à une plus grande précision et d’exactitude que damier approches9.
- Calibrer les caméras Lander avec logiciel de stéréo-calibration (Figure 1 et Figure 2; voir Table des matières pour une recommandation de logiciels).
NOTE : Étalonnage peut être vérifiée avant de l’utiliser dans le domaine en mesurant des cibles de taille connue à différentes distances (voir supplémentaire vidéo 1). Erreur de mesure moyenne pour une cible de 50 cm à une distance de 3 m (ou moins) devrait être moins de 2 % de la longueur de cibles connus. Notez également qu’un étalonnage donné ne sera valable que si les positions de caméra ne changent pas par rapport à un autre. Il est essentiel de prendre soin et éviter les bousculades involontaires des caméras jusqu'à ce que tous les prélèvement a été effectué. - Recueillir des données sur le terrain à l’aide de l’atterrisseur calibré (Figure 1, 2 de vidéo supplémentaire).
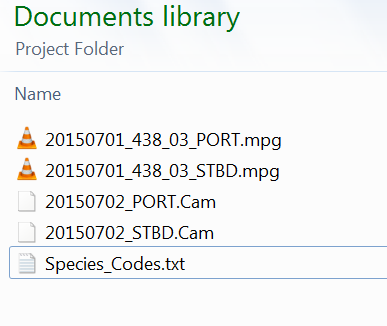
- Après que étude sur le terrain est terminée, créez un nouveau dossier de projet contenant des fichiers vidéo et de calibration.
Remarque : Dans chaque projet dossier il a besoin au minimum de cinq dossiers : la gauche et la droite «. Fichiers de calibrage Cam », les fichiers vidéo à droite et gauche (. MP4 ou. Format AVI uniquement) et la liste des espèces (format .txt). - Dans le logiciel de mesure stéréo, démarrez un nouveau projet de mesure et charger des fichiers vidéo et d’étalonnage appropriés.
Remarque : Les captures d’écran de toutes les étapes du logiciel sont disponibles parmi les Fichiers supplémentaires.- Accédez à « Mesure » > « Nouveau fichier de mesure ».
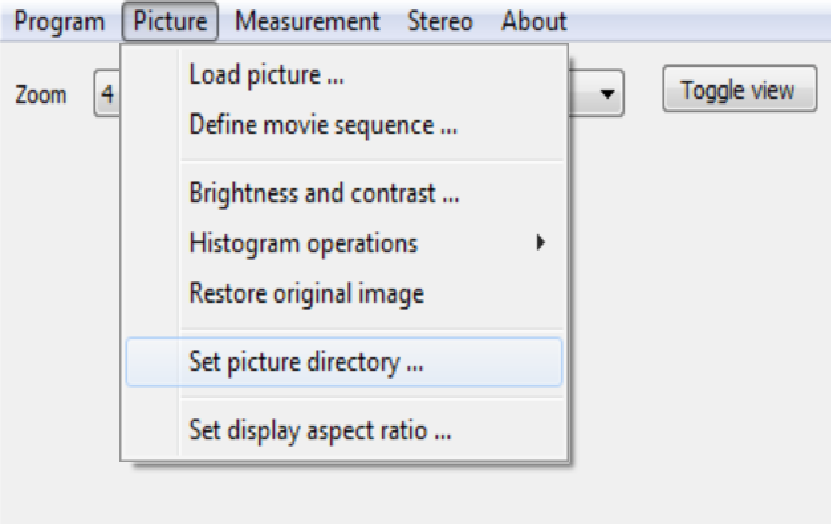
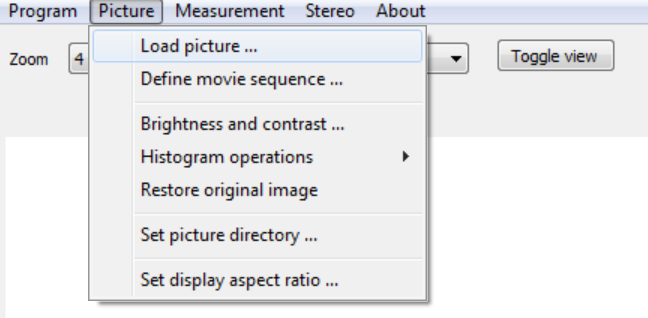
- Définir le répertoire de l’image en accédant à « Image » > « Répertoire photo Set » et choisissez le dossier contenant tous les fichiers projet.
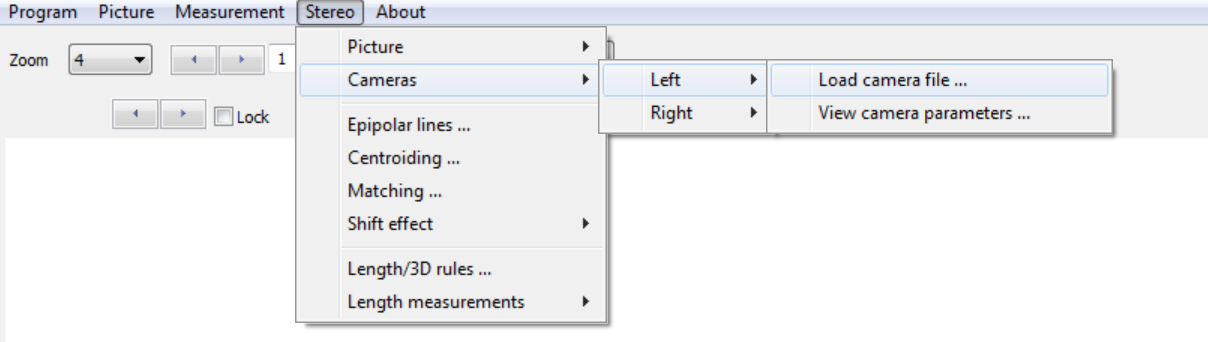
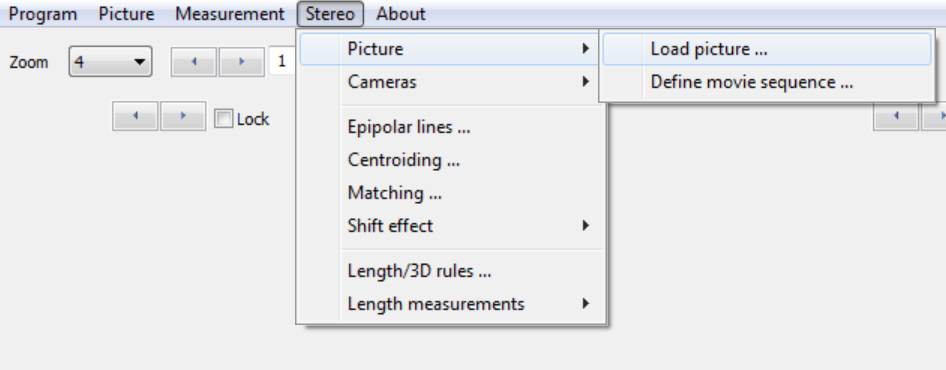
- Charger la caméra de gauche «. Cam » dossier en accédant à « Stéréo » > « Caméras » > « Gauche » > « Charge camera file » et sélectionner le fichier approprié.
- Répétez l’étape 1.4.3 pour charger la bonne caméra «. Fichier de Cam »
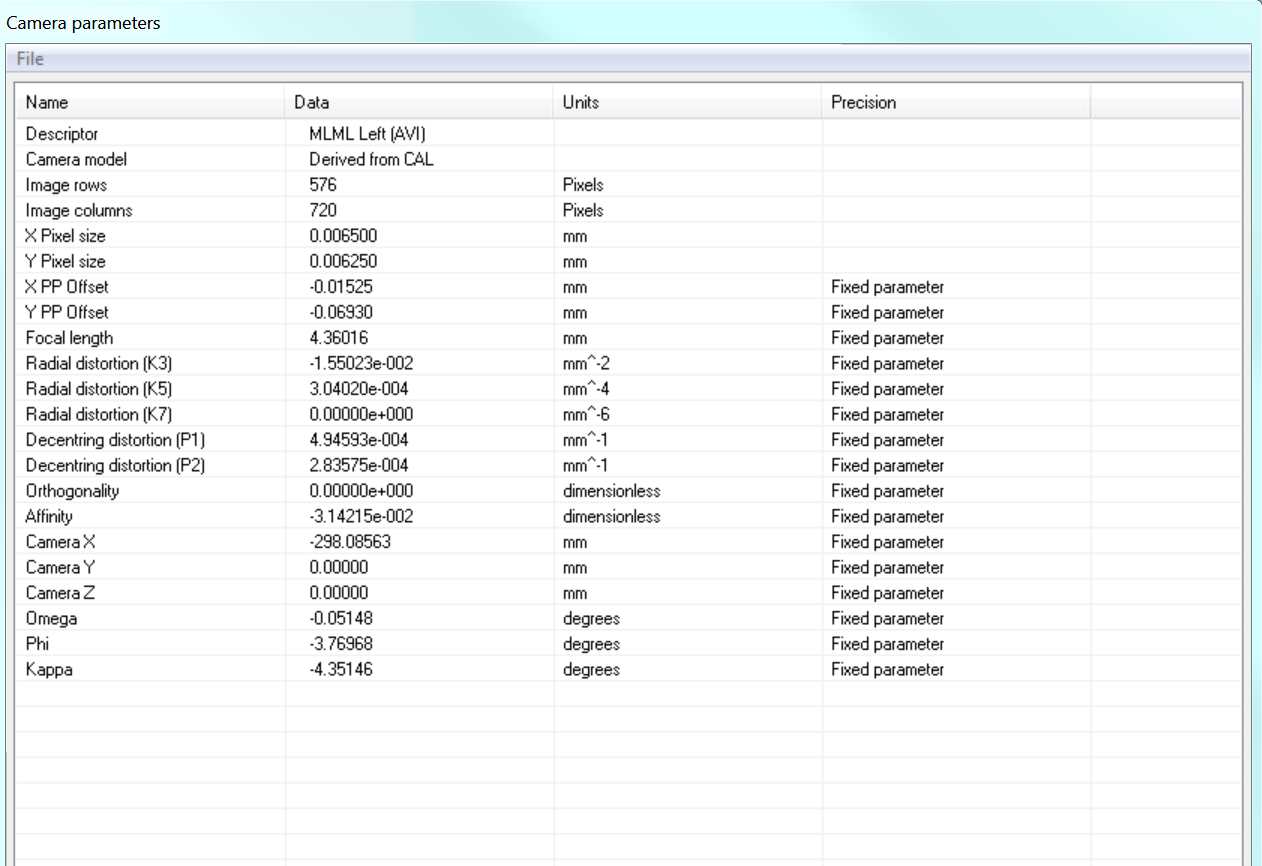
Remarque : Ces fichiers contiennent des mesures d’étalonnage pour chaque caméra (par exemple, taille des pixels, ratio d’aspect, distorsion radiale, décentration distorsion, etc.) et servira à mesurer le poisson et calculer la distance de-huis clos (c.-à-d., Z distance). - Définir la séquence de film pour le fichier vidéo gauche en accédant à « Image » > « définir la séquence du film » et en sélectionnant le fichier vidéo de la caméra de gauche.
- Charger le fichier vidéo gauche dans logiciel de mesure en sélectionnant « Image » > « load image ».
Remarque : Assurez-vous que la case « Verrouiller » est décochée avant le chargement de fichiers vidéo. Cela permet les deux vidéos de charger simultanément. - Définissez film séquence et charge le fichier vidéo pour la vidéo de droite en utilisant les menus « Stéréo » > « photo » > « définir la séquence du film » et « Stéréo » > « photo » > « load image ».
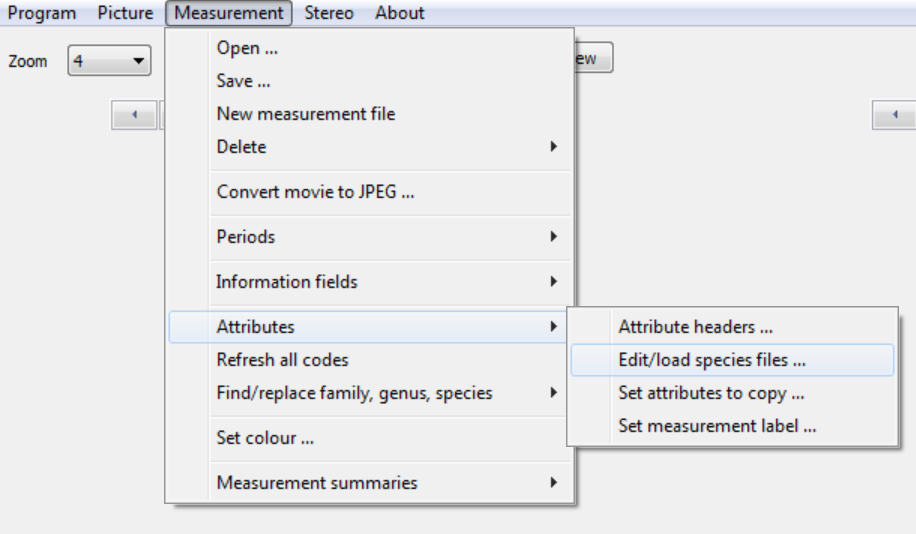
- Charger la liste des espèces en naviguant jusqu'à « Mesure » > « Attributs » > « Edit/load file d’espèces ».
- Entrez les informations d’ID enquête sous « Champs » > « Modifier la valeur du champ » et enregistrez le fichier pour créer un. EMObs projet.
- Synchroniser les vidéos à l’aide de flash lumineux, handclap, timbre de temps universel coordonné (UTC) ou n’importe quel événement spécifique de temps qui se produit dans les deux vidéos.
- Si vous utilisez des informations d’heure UTC, châssis-pas en avant dans la vidéo de gauche jusqu'à ce que l’horodatage commence un nouveau deuxième. D’autre image vers l’avant jusqu’au flash lumineux ou handclap se produit.
- Cadre-étape la vidéo de droite vers l’avant jusqu'à ce que l’horodatage correspond exactement à la vidéo de gauche. Cadre d’autre pas en avant jusqu'à ce que le moment exact où l’éclair ou handclap correspond à la vidéo de gauche.
Remarque : Il est important que les vidéos soient synchronisées sur le même châssis. Synchronisation vidéo doit être vérifiée périodiquement à l’aide de l’horodatage vidéo afin d’éviter la caméra cadre dérive pendant l’analyse. Un claquement de main filmée pourrait également être utilisé en début et en fin de la vidéo pour tester ce droit et gauche vidéos ont été synchronisés sur la même trame.
- Cliquez sur le bouton « Lock » pour s’assurer que les vidéos jouent ensemble et assurer la synchronisation.
2. générer des dénombrements ponctuels et calculer MaxN
Remarque : Chaque poisson est d’abord marquée par un point 2D pour la plus basse possible résolution taxonomique. Poissons avec ID incertain doit être marquée pour consultation ultérieure.
- Attendre pour commencer à compter les poissons jusqu'à la fin d’une rotation de caméra complet pour assurer l’utilisation de 360 degrés. Aussi attendre jusqu'à ce que les sédiments s’est dégagé (généralement < 1-2 min après un contact avec le fond).
- Dès que l’atterrisseur commence sa première rotation, faites un clic droit pour définir une nouvelle période d’échantillonnage : « Définitions période » > « Ajouter nouvelle début période ». Entrez le premier nom de période comme « 01 » et cliquez sur « OK ».
- Pendant que l’atterrisseur pivote, commencer marquant chaque poisson qui vient dans le cadre avec un point 2D à l’aide de la caméra de gauche seulement.
- Pour ajouter un point 2D, faites un clic droit, sélectionnez « Add point » et choisissez le nom de bonne espèce. L’étiquette au niveau plus bas possible taxonomique, en sélectionnant « spp. » d’espèces inconnues et cliquez sur « OK ».
- Continuent de marquer chaque nouveaux poissons selon l’étape 2.2.1 jusqu'à la conclusion de la rotation.
- Répétez protocole procédures 2.1-2.2 pour chaque rotation supplémentaire de Lander - veiller à ce qu’une nouvelle période est définie au début de chaque rotation de la caméra.
NOTE : Les courbes de l’accumulation des espèces ont servi à déterminer que huit tours étaient, en moyenne, suffisantes pour caractériser l’abondance des poissons dans la présente étude. Chercheurs doivent envisager d’effectuer des essais préliminaires avec des rotations de caméra supplémentaire, au fil du temps de trempage plus longs, pour caractériser le nombre optimal de rotations de la caméra au sein d’un écosystème particulier. - Calculer chaque espèce comtes d’individus observés par rotation de la caméra.
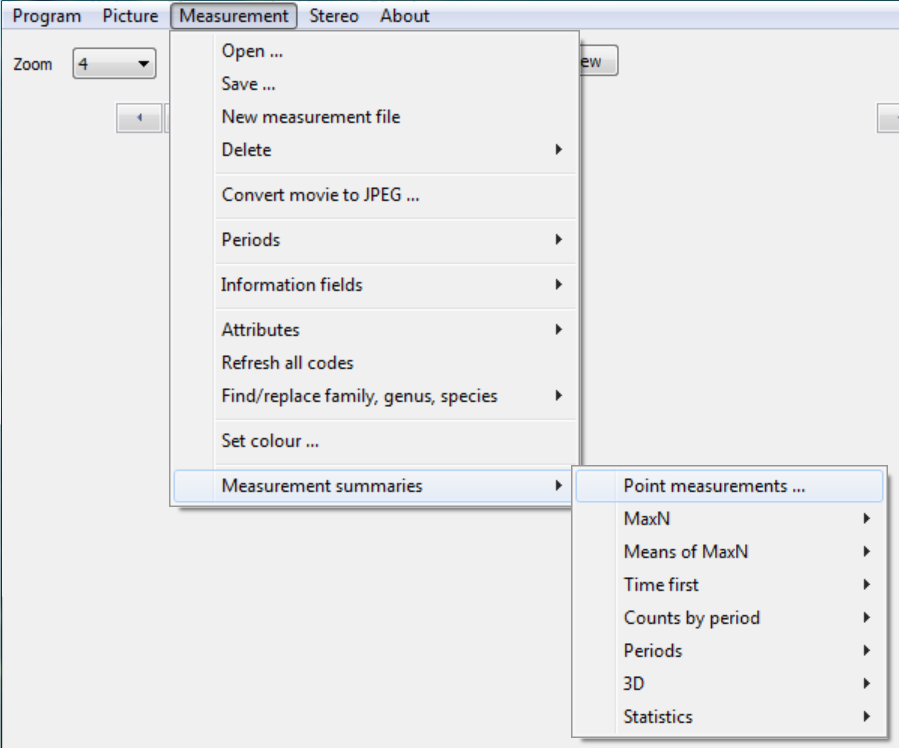
- Après tous les rotations ont été énumérées, exportez points 2D en naviguant jusqu'à « Mesure » > « Résumés mesure » > « Point de mesures » et épargnez des points 2D comme fichier a.txt.
- Ouvrez le fichier de point de 2D.txt enregistré comme une feuille de calcul et de créer un tableau croisé dynamique des espèces par rapport au nombre de rotation de résumer les chefs d’accusation (tableau 1) en accédant à « Insérer » > « Tableau croisé dynamique ». Sélectionnez « Genre et l’espèce » pour « Étiquette de ligne » et « Période » pour « Étiquette de colonne ».
- Choisissez la MaxN pour chaque espèce en sélectionnant la rotation de la caméra qui a le plus grand nombre d’individus de cette espèce (tableau 1).
- Pour les poissons identifiés uniquement à ce genre, sélectionnez un niveau genre MaxN basée sur la rotation qui avait le plus grand nombre de personnes identifiées à l’espèce dans ce genre particulier.
Remarque : Cette étape permet d’éviter le double comptage des poissons individuels qui n’étaient pas identifiables à des groupes taxonomiques plus élevés (p. ex., seulement pour le genre ou famille). Par exemple, dans le tableau 1, ' rotation 1' contenait 10 non identifiés Sebastes spp et 33 membres du genre Sebastes identifiées à l’espèce, alors que ' rotation 3' contenait seulement deux non identifiés Sebastes spp et 43 membres du le genre Sebastes identifiées à l’espèce. C’est pourquoi ' rotation 3' serait utilisée pour MaxN comte d’inconnu Sebastes spp. De cette façon, on fait l’hypothèse prudente que 8 de la non identifiés Sebastes spp ' rotation 1' ont été identifiés en "rotation 8'. - Si plusieurs rotations ont le même nombre de MaxN pour une espèce donnée, choisissez la première rotation avec MaxN pour les mesures de points 3D.
- Pour chaque espèce, prenez des mesures 3D de poissons dans la rotation MaxN survenus.
- Utilisez les points 2D sauvés collectées lors des étapes 2.1 à 2.3 pour naviguer vers le poisson même exact pour la mesure 3D.
- Effectuer un zoom avant au moins 4 X pour mieux identifier la pointe du museau du poisson et des bords de nageoires caudales (Figure 3).
Remarque : Il peut être nécessaire à l’étape du cadre vers l’avant ou vers l’arrière pour trouver la meilleure orientation du poisson pour une mesure 3D. L’orientation « best » est l’une où le museau et les bords des nageoires caudales sont visibles dans les deux caméras. - Manuellement, cliquez sur l’extrémité du museau, puis le bord de la queue de la caméra de gauche, puis répétez la sélection dans le même ordre dans la vidéo de droite.
- Sélectionnez identification de la bonne espèce de menus déroulants comme cela a été fait en 2.2.1.
- Si une mesure de longueur 3D n’est pas possible, car l’instance si la tête et la queue du poisson ne sont pas visibles dans les deux caméras, puis marquez un point 3D plutôt de gauche en cliquant sur la même position du poisson dans les vidéos à la fois gauche et droite. Remplissez les champs d’information comme avant et laisser le commentaire « Exclure de la mesure de la longueur ».
Remarque : MaxN peut se produire sur différentes rotations des caméras pour les différentes espèces ; Cependant, pour une espèce donnée, mesures devraient se produire dans une rotation seulement (tableau 1).
- Après avoir complété les mesures 3D pour tous les poissons, l’exportation fichier de as.txt de données pour une analyse ultérieure.
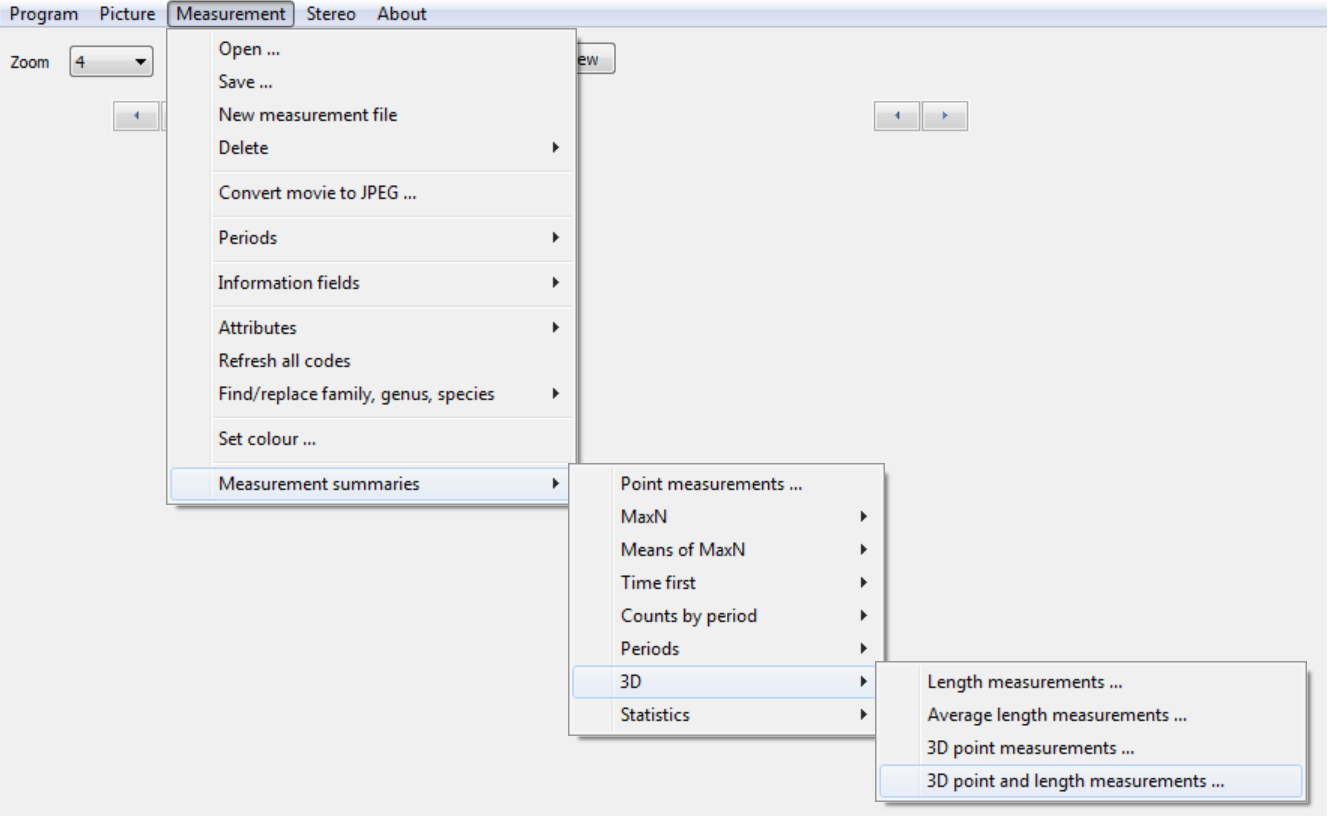
- Accédez à « Mesure » > « Résumés mesure » > « 3D Point et la durée des mesures » et save.txt fichier à exporter.
3. 95 % Z distance procédure de zones d’enquête spécifique à l’espèce
Remarque : La distance de 95 % Z est une estimation de la distance moyenne qu'une espèce pourrait sûrement être identifiée dans une étude donnée tout en excluant les cas de conditions exceptionnelles de la clarté de l’eau ou l’éclairage. Ce calcul prend en compte les conditions océanographiques moyennes d’une étude donnée et devront être recalculé pour chaque nouvelle étude.
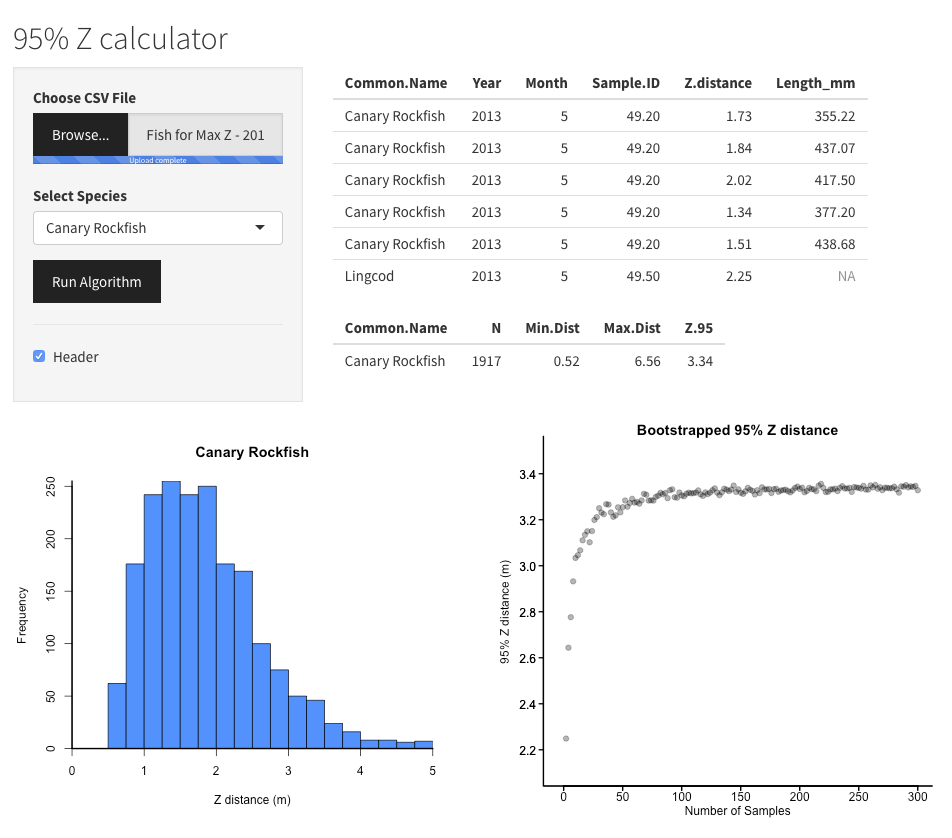
- Utilisez amorçage simple pour déterminer si la taille de l’échantillon est assez grande pour caractériser la distance de détection fiable pour chaque espèce.
- Pour chaque classe de taille d’échantillon (p. ex., bacs de taille d’échantillon de 5 poissons), prendre 1 000 aléatoire tire de la taille de l’échantillon sélectionné avec remplacement de la population de l’échantillon et calculer la moyenne quantile de 95 % des distances de ces 1 000 dessine et tracer le résultant courbe asymptotique. Voir le code fourni dans supplémentaire fichiers 1 & 2.
- Vérifier que les échantillons adéquats ont été obtenus en comparant la taille de l’échantillon réel avec l’asymptote de distance 95 % Z avec la taille de l’échantillon.
- Calculer la valeur de distance 95 % Z comme le quantile de 95 % de la distance-de-caméra mesurée pour une espèce dans l’ensemble de toutes les enquêtes.
- Calculer l’aire efficace interrogé pour chaque espèce à l’aide de la valeur 95 % Z.
NOTE : Dans le cas d’un rotation Lander, la représente 95 % Z valeur le rayon extérieur d’un andain enquêtée, avec le rayon interne déterminée par la configuration physique de l’outil et comment fermer à la base les caméras est en mesure d’observer. Tandis que l’atterrisseur tourne, une zone d’étude « donut » en forme se forme (Figure 4).- Calculer l’aire étudiée comme :

NOTE : par exemple, une espèce relativement importante comme sébaste (Sebastes ruberrimus) avait une distance de 95 % Z de 3,3 m et une zone d’arpentage efficace de 30,9 m2 par déploiement Lander : 34,3 m2 (cercle extérieur) - 3,4 m2 (intérieur cercle) = 30,9 m2 (zone totale).
- Calculer l’aire étudiée comme :
- En utilisant la surface calculée interrogés (étape 3.3.1), convertir les espèces individuelles chefs d’accusation (MaxN) dans les estimations de la densité pour chaque relevé visuel à l’aide de l’équation :

NOTE : Une procédure similaire pourrait être utilisée pour calculer une densité volumétrique plutôt qu’une densité ; Toutefois, ce processus n’est pas décrit ici.



Tableau 1 : tableau récapitulatif exemple MaxN. La sélection de MaxN pour chaque espèce est illustrée avec texte rouge et gras. Notez qu’un conservateur MaxN pour non identifiés Sebastes spp a été déterminée par la rotation avec la plupart Sebastes identifiées à l’espèce (rotation 3). Aussi, bien que cette étude a utilisé huit rotations de la caméra, seulement quatre rotations sont affichées dans le tableau 1 pour plus de simplicité. Le processus de sélection MaxN est identique quel que soit le nombre de rotations.

Figure 1: Lander vidéo stéréo. Clé matérielle est numérotée (1) 300 m de cordon ombilical, (2) deux enregistreurs vidéo numériques (DVR) avec des cartes de stockage 32Go amovibles à l’intérieur de la bouteille étanche, (3) deux LED s’allume sorties 3 000 lumens à une température de couleur de 5 000 K et (4). deux caméras avec résolution de ligne (TVL) 620 TV. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.

Figure 2: cube de Calibration (500 x 500 x 300 mm). Exemple d’un étalonnage avec un « cube de calibration » montré dans deux orientations différentes : (A) du côté droit du cube est poussé vers les caméras, et (B) la face du cube est parallèle à la face des caméras. Points rouges indiquent les points de référence utilisées dans cette méthode d’étalonnage particulière et doivent toujours être identifiés dans l’ordre numéroté. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.

Figure 3: mesure 3D placé sur Sebastes miniatus. La pointe du museau et l’extrémité de la queue ont été identifiés dans chaque image de la caméra permettant de mesure stéréo. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.

Figure 4: aire étudiée par l’outil de Lander. Surface utile interrogé par l’outil Lander est bordé par le minimum distance Z et la distance de 95 % Z pour chaque espèce. Notez que ce domaine créé un volume « donut » en forme de sondage autour de l’atterrisseur. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.
Subscription Required. Please recommend JoVE to your librarian.
Representative Results
Entre 2013 et 2014, nous avons mené des 816 enquêtes avec l’atterrisseur de stéréo-vidéo tournante (Figure 1) le long de la côte centrale de Californie et MaxN et 95 % Z distance (Figure 4) données recueillies sur plus de 20 espèces. Il y avait clairs motifs dans la gamme détectable efficace des espèces observées, probablement due à l’interaction de l’espèce taille, forme et coloration (Figure 5). Par exemple, le drapeau de sébaste (Sebastes rubrivinctus) a distinct des bandes sur les côtés permettant une identification confiante à des distances supérieures à celles des autres espèces de taille comparable. De même, le canari (Sebastes pinniger) sont relativement gros corps, mais ont une pigmentation qui est semblable aux autres espèces, ce qui rend plus difficile d’identifier à distance (Figure 5).
Nous utilisons deux espèces pour démontrer les calculs de MaxN et les valeurs de distance 95 % Z : pygmée sébastes (Sebastes wilsoni) et la morue-lingue (o. elongatus). Le premier est un poisson de petite taille qui peut être difficile à identifier à distance ; considérant qu’o. elongatus est relativement importante, ont une forme distincte et est plus facilement identifiable. À partir de 2013-2014, mesures 1 191 pour S. wilsoni et 1 222 pour o. elongatus ont été recueillis. Ensuite, les quantiles de 95 % de la distance à laquelle ces espèces ont été observées : les distances de 95 % Z étaient 2.65 m pour s. wilsoni et 3,96 m pour o. elongatus (Figure 5) ont été calculés. Ces distances 95 % Z traduisent en zones d’enquête efficace de 18,6 m2 et 46,0 m2 pour S. wilsoni et o. elongatus, respectivement. Une simple analyse bootstrap a confirmé cet échantillon suffisamment tailles ont été obtenus pour la caractérisation des valeurs de distance Z 95 %. Chez les deux espèces, l’estimation de la distance de 95 % Z stabilisé lorsque plus de 50 enquêtes contenant ces espèces ont été échantillonnés, fournissant des preuves solides que la taille des échantillons choisis ont été plus que suffisante pour caractériser la zone de prélèvement Lander efficace pour ces espèces (Figure 6).
MaxN comptes par sondage étaient ensuite converties en densité (nombre de poisson/m2). Nous avons utilisé des estimations de la densité des 816 enquêtes pour vérifier l’hypothèse que morue-lingue et le sébaste pygmée serait observée principalement sur les habitats de haut-relief. Chez les deux espèces, il y avait significativement plus grande densité au secours de haute et moyenne comparée à celle des habitats de faible relief (Kruskal-Wallis, p <<. 001 ; La figure 7). Ces résultats concordaient avec les associations d’habitat a déjà été indiqué pour les deux espèces15. Il n’y a aucune différence entre moyen et haut relief habitat chez les deux espèces.
Pour comprendre comment l’atterrisseur tournante par rapport à des systèmes de caméras fixes traditionnels, nous avons estimé les différences de densité et variabilité des estimations entre une rotation et d’un atterrisseur fixe simulé. Nous avons supposé qu'un atterrisseur typique de la seule caméra fixe aurait un champ visuel de 90 degrés. L’atterrisseur rotatif a un champ visuel de 60 degrés et nécessite 5 secondes de rotation terminer une vue à 90 degrés. À l’aide de 261 sondages, nous avons sélectionné des données d’observation de poissons entre les milieu 5 secondes de rotations Lander d’établir MaxN. Estimations de la densité pour le Pseudo-stationnaire Lander ont été normalisés en utilisant les zones réduites de couverture (c'est-à-direenviron ¼ le domaine de l’atterrisseur rotatif). Différences dans la densité moyenne et coefficient de variation entre les Landers rotatifs et Pseudo-fixes ont été évaluées avec le test t de Welch. Densités obtenues par la caméra rotative étaient 18 % supérieures à celles obtenues avec des caméras fixes (t21,7 Welch, p = 0,081, Figure 8A). En outre, le coefficient de variation est 1,8 fois plus élevé avec la caméra fixe par rapport à la rotation des caméras (t15.1 de Welch, p < 0,001, Figure 8).

Figure 5 : Z distances observées pour select ESPECE. Les barres verticales rouges indiquent la distance minimale de Z (0,81 m de caméras) sur la gauche et la valeur de Distance Z de 95 % sur la droite. Notez que cela représente la zone d’étude efficace moyenne autour de l’atterrisseur pour chaque espèce. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.

Figure 6 : Amorcé les valeurs de distance Z. Amorçage pour augmenter la taille de l’échantillon pour les observations d’o. elongatus (A) S. wilsoni et (B). Taille des échantillons allant de 3-300 ont été amorcé 1000 fois chacun pour calculer la distance moyenne de 95 % Z et vérifier que la taille de l’échantillon ont été adéquate. Notez que les valeurs de l’axe y varient entre 2,0 à 2,6 m pour S. wilsoni et de 2,6 à 4,0 m pour elongatus o. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.

Figure 7 : Différences d’habitat pour deux select ESPECE. La densité moyenne (± écart type) de (A) S. wilsoni et (B) o. elongatus mesurée sur l’habitat du rock faible, moyen et haut relief. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.

Figure 8 : Différences entre les landers rotatifs et fixes Pseudo-aléatoire. Les deux estimations de (A) moyenne densité (poissons/m2 ± et) et (B) moyenne coefficient de variation (CV) ± ét pour 261 enquêtes sont présentées. S’il vous plaît cliquez ici pour visionner une version agrandie de cette figure.

Supplémentaire vidéo 1 : vérification de l’étalonnage. Étalonnage peut être vérifiée avant de l’utiliser sur le terrain en mesurant des cibles de taille connue à différentes distances. S’il vous plaît cliquez ici pour voir cette vidéo. (Clic droit pour télécharger.)

Vidéo supplémentaire 2 : inspection sous-marine Footage. S’il vous plaît cliquez ici pour voir cette vidéo. (Clic droit pour télécharger.)
Subscription Required. Please recommend JoVE to your librarian.
Discussion
La métrique MaxN traditionnelle repose sur l’idée de compter un nombre minimal garanti de personnes présentes lors d’une enquête. Si un certain nombre de poissons est visible simultanément dans une seule trame vidéo, il ne peut y avoir soit moins présent, mais parce que les poissons sont mobiles et distribuée de façon hétérogène, la probabilité de voir tous les individus simultanément au cours d’une seule image vidéo est faible . Il est donc probable que les traditionnel MaxN sous-estime vrai poisson abondance16,17. En outre, il a été démontré que MaxN traditionnel peut afficher non-linéaire négativement influencé par les relations avec croissant poisson abondances16,18. Cela peut être lié au phénomène de saturation gear par lequel indices d’abondance relative ne parviennent pas à détecter le vrai augmente l’abondance19,20. À l’inverse, l’apparente stabilité d’un indice à la baisse vraiment abondance de poissons a été qualifie de « hyperstabilité » et pourrait déboucher sur l’écrasement des populations de poissons21,22. Une étude récente a indiqué que l’instabilité MaxN puisse être atténuée en augmentant les sondés de champ16. Dans cette étude, la relation entre MaxN et abondance réelle est devenu plus en plus linéaire alors que le champ de vision s’approchait de 100 % (c.-à-d., 360 degrés).
Les résultats de la simulation de caméra fixe indiquent congruence avec ces résultats antérieurs et suggèrent que la valeur de MaxN peut mieux caractériser abondance de poisson. Par exemple, le coefficient moyen estimé de variance a été réduit entre les estimations de la densité dérivées de l’atterrisseur tournant par rapport à l’atterrisseur Pseudo-aléatoire stationnaire. Ceci est probablement dû au fait que poissons sont distribués de façon hétérogène, et que les caméras fixes sont plus susceptibles de « miss » le poisson présent si l’atterrisseur est orientée vers la mauvaise direction. Landers tournantes maximiser l’effort d’échantillonnage en examinant les 360 degrés autour de l’outil, et l’effet net est de réduire à la fois les coûts d’échantillonnage et variance et une augmentation globale de la puissance statistique de l’étude. Les études à venir pourraient mieux résoudre ce problème en testant directement un atterrisseur rotatif avec un atterrisseur fixe distinct dans une conception de l’enquête appariés. De même, nous n’avons pu tester directement la relation entre MaxN et abondance réelle dans cette étude et les études à venir peuvent directement tester cela en utilisant une simulation ou environnement, contrôlé, comme l’a fait en Campbell (2015)16.
Une critique possible de la méthode MaxN modifiée est la possibilité de doubles comptage personnes. Parce que l’atterrisseur fait un tour complet par minute, et les espèces benthiques d’intérêt dans l’écosystème ont tendance à être relativement sédentaires et lente circulant sous la plupart des conditions, nous estimons que le risque de double comptage était faible. En outre, les cas où poisson serait d’entrer ou de sortir de la zone d’étude au cours des huit rotations ont été observés. Des précautions supplémentaires pour éviter la double prise en compte comme l’utilisation de la rotation avec le plus grand nombre d’individus d’un genre donné pour compter les espèces non identifiées ont été prises. Autres mesures ont été proposées comme indices d’abondance de poissons tels que signifie comte ; Toutefois, ces trop montrent à sous-estimer systématiquement abondance réelle tout en augmentant la variabilité des densité estime que16. MaxN est par conséquent recommandée comme une mesure plus précise de l’abondance de poissons. Alors que notre métrique MaxN modifié ne garantit pas une estimation conservatrice du nombre minimum absolu des personnes, nous sommes dans l’ensemble convaincus que cette approche MaxN modifiée fournit des estimations plus précises de l’abondance de poissons vrai, et que les poissons trop comptage sont de relativement peu préoccupant.
Beaucoup côté-Regarde un vidéo-transect enquêtes emploi fixe transect de largeur pour estimer la densité pour toutes les espèces. De même, une approche à l’utilisation de stéréo-vidéo Landers serait d’utiliser un maximum distance-de-l’appareil photo pour calculer les deux zone étudiée et la densité de poissons. Les deux peuvent conduire à une sous-estimation des espèces qui ne sont pas fiable identifiables à des distances plus petites que le fixe transect de largeur estimations23. La distance à laquelle une espèce est sûrement identifiée est causée par l’interaction de facteurs comme la taille, forme, motif de coloration, comportement du poisson, ainsi que des facteurs environnementaux. La méthode distance 95 % Z est particulièrement avantageuse en ce qu’elle représente pour l’interaction de tous ces facteurs en même temps. Par exemple, o. elongatus était l’espèce que nous sommes en mesure d’identifier à la plus grande distance, probablement en raison de sa forme de corps distincts, large, allongé et la tendance comportementale à poser sur le plancher océanique. Rosy sébastes (Sebastes rosaceus) avait l’un des distances les plus courtes Z, probables parce que, en tant que membre du sous-genre Sebastomus , il a plusieurs congénères qui se ressemblent et sont difficiles à distinguer à des distances accrues. En tenant compte de chaque espèce régions étudiées par l’atterrisseur, nous soyons en mesure de mieux estimer l’abondance de poissons. L’approche « bootstrap » à la vérification de taille d’échantillon est simple et facilement mis en œuvre dans d’autres enquêtes, et nous pensons que la méthode de la distance de 95 % Z pourrait être plus adaptée pour accueillir la ligne transect de conception de l’enquête. 95 % Z distance représenterait alors une distance horizontale de détection fiable pour les espèces observées avec des outils de véhicule submersible télécommandé (ROV). À l’avenir, les chercheurs peuvent étudier en utilisant la théorie de l’échantillonnage distance à densité de modèle en fonction de la détectabilité avec distance23,24.
Qu’il y a une plus grande utilisation des réserves de ne pas exploiter dans fisheries management25,26,27, il y a un besoin croissant de techniques d’échantillonnage non extractives, en particulier dans les habitats en eau profonde non accessibles au plongeur enquêtes. Toutefois, il est également nécessaire que ces techniques de fournissent des données exactes et fiables sur la composition de longueur, l’abondance et les espèces de poissons. Landers vidéo sont un outil de surveillance relativement nouvel qui ont un faible coût, peut être utilisé sur les relativement petits bateaux d’occasion et sont sur le plan logistique plus simple à exploiter que les robots sous-marins et submersibles tout en exigeant moins et moins de personnel qualifié. Tandis que ne pas examinée par ces méthodes, Landers stéréo-appareil photo sont capables de mesure de la longueur exacte avec une erreur inférieure à 2 %. En outre, Landers peuvent être déployées rapidement sur de vastes régions géographiques, augmentant l’inférence statistique. Nous espérons que l’intérêt pour les outils d’augmenter comme recherche agences look de serrer les budgets et de diffuser plus efficacement les effort d’échantillonnage de surveillance vidéo. Notre modification des MaxN et 95 % Z distance on envisagera d’études à l’avenir écologiques utilisant Landers vidéo tournantes.
Subscription Required. Please recommend JoVE to your librarian.
Disclosures
Les auteurs n’ont rien à divulguer
Acknowledgments
Ce travail a été financé par The Nature Conservancy et des donateurs privés, ressources Legacy Fund Foundation, Gordon et Betty Moore Foundation, Environmental Defense Fund, Californie Sea Grant Program, Programme National de recherche coopérative NMFS et un NOAA Concession de Saltonstall-Kennedy #13-SWR-008. Marine de recherche appliquée et de prospection (Dirk Rosen, Rick Botman, Andy Lauerman et David Jefferies) mis au point, construit et entretenu l’outil vidéo de Lander. Nous remercions Jim Seager et SeaGIS™ logiciel pour le support technique. Le capitaine et le pêcheur commercial Tim Maricich et membres d’équipage à bord du soutien de F/V Donna Kathleen fourni dans le déploiement de l’atterrisseur de 2012 à 2015. Merci à tous ceux qui ont participé à la collecte de données vidéo ou analyse (Anne Tagini, Donna Kline, le lieutenant Amber Payne, Bryon Downey, Marisa Ponte, Rebecca Miller, Matt Merrifield, Walter Heady, Steve Rienecke, EJ Dick et John Field).
Materials
| Name | Company | Catalog Number | Comments |
| calibration cube | SeaGIS | http://www.seagis.com.au/hardware.html | 1000x1000x500 mm is the preferred dimensions. Other methods of calibration are available. |
| CAL calibration software | SeaGIS | http://www.seagis.com.au/bundle.html | |
| EventMeasure stereo measurement software | SeaGIS | http://www.seagis.com.au/event.html | |
| Statistical software | R Core Team 2017 (v. 3.4.0) | Bootstrapping code can be found: https://github.com/rfields2017/JoVE-Bootstrap-Function | |
| Spreadsheet Software | Microsoft Excel | ||
| 2 waterproof cameras | Deep Sea Power and Light | HD quality preferred | |
| 2 depth rated, waterproof lights | Deep Sea Power and Light : 3000 lumen LED with 5000k color temperature | ||
| DVR recorder | Stack LTD DVR | ||
| standard PC | Windows 10 preferred OS | ||
| rotating Lander platform | Marine Applied Research and Engineering (MARE) |
References
- Love, M. S., Yoklavich, M. M., Thorsteinson, L. K. The Rockfishes of the Northeast Pacific. , University of California Press. Berkley. (2002).
- Laidig, T. E., Watters, D. L., Yoklavich, M. M. Demersal fish and habitat associations from visual surveys on the central California shelf. Estuar. Coast. Shelf Sci. 83 (4), 629-637 (2009).
- Anderson, T. J., Yoklavich, M. M. Multiscale habitat associations of deepwater demersal fishes off central California. Fish. Bull. 105 (2), 168-179 (2007).
- Yoklavich, M. M., Cailliet, G. M., Sullivan, D. E., Lea, R. N., Love, M. S. Habitat associations deep-water rockfishes a submarine canyon an example of a natural refuge. Fish. Bull. 98 (3), 625-641 (2000).
- Status of the Pacific Coast Groundfish Fishery, Stock Assessment and Fishery Evaluation. , Pacific Fishery Management Council. Portland, OR. (2016).
- Cappo, M., Harvey, E., Malcolm, H., Speare, P. Potential of video techniques to monitor diversity, abundance and size of fish in studies of marine protected areas. Aquatic protected areas- What works best and how do we know. Beumer, J. P., Grant, A., Smith, D. C. , Proc. World Congr. on Aquat Protected Areas. Australian Soc. for Fish Bio. North Beach, Western Australia. 455-464 (2003).
- McLean, D. L., Green, M., Harvey, E. S., Williams, A., Daley, R., Graham, K. J. Comparison of baited longlines and baited underwater cameras for assessing the composition of continental slope deepwater fish assemblages off southeast Australia. Deep-Sea Research Part I: Oceanographic Research Papers. 98, 10-20 (2015).
- Parker, D., Winker, H., et al. Insights from baited video sampling of temperate reef fishes: How biased are angling surveys. Fish. Res. 179, 191-201 (2016).
- Boutros, N., Shortis, M. R., Harvey, E. S. A comparison of calibration methods and system configurations of underwater stereo-video systems for applications in marine ecology. Limnol. Oceanogr. Methodss. 13 (5), 224-236 (2015).
- Harvey, E. S., Cappo, M., Butler, J. J., Hall, N., Kendrick, G. A. Bait attraction affects the performance of remote underwater video stations in assessment of demersal fish community structure. Mar. Ecol. Prog. Ser. 350, 245-254 (2007).
- Watson, J. L., Huntington, B. E. Assessing the performance of a cost-effective video lander for estimating relative abundance and diversity of nearshore fish assemblages. J. Exp. Mar. Bio. Ecol. 483, 104-111 (2016).
- Easton, R. R., Heppell, S. S., Hannah, R. W. Quantification of Habitat and Community Relationships among Nearshore Temperate Fishes Through Analysis of Drop Camera Video. Mar. Coast. Fish. 7 (1), 87-102 (2015).
- Hannah, R. W., Blume, M. T. O. Tests of an experimental unbaited video lander as a marine fish survey tool for high-relief deepwater rocky reefs. J. Exp. Mar. Bio. Ecol. 430, 1-9 (2012).
- Starr, R. M., Gleason, M. G., et al. Targeting Abundant Fish Stocks while Avoiding Overfished Species: Video and Fishing Surveys to Inform Management after Long-Term Fishery Closures. Plos One. 11 (12), 0168645 (2016).
- Love, M. S. Certainly more than you want to know about the fishes of the Pacific Coast: a postmodern experience. , Really Big Press. Santa Barbara, CA. (2011).
- Campbell, M. D., Pollack, A. G., Gledhill, C. T., Switzer, T. S., DeVries, D. A. Comparison of relative abundance indices calculated from two methods of generating video count data. Fish. Res. 170, 125-133 (2015).
- Cappo, M., Speare, P., De'ath, G. Comparison of baited remote underwater video stations (BRUVS) and prawn (shrimp) trawls for assessments of fish biodiversity in inter-reefal areas of the Great Barrier Reef Marine Park. J. Exp. Mar. Bio. Ecol. 302 (2), 123-152 (2004).
- Schobernd, Z. H., Bacheler, N. M., Conn, P. B., Trenkel, V. Examining the utility of alternative video monitoring metrics for indexing reef fish abundance. Can. Jour. Fish. Aquat. Sci. 71 (3), 464-471 (2014).
- Hansen, M. J., Schorfhaar, R. G., Selgeby, J. H. Gill-Net Saturation by Lake Trout in Michigan Waters of Lake Superior. North Am. J. Fish. Manag. 18 (4), 847-853 (1998).
- Dauk, P. C., Schwarz, C. J. Catch estimation in the presence of declining catch rate due to gear saturation. Biometrics. 57 (1), 287-293 (2001).
- Hilborn, R., Walters, C. J. Quantitative Fisheries Stock Assessment Choice, Dynamics and uncertainty. , Springer. Dordrecht. (1992).
- Erisman, B. E., Allen, L. G., Claisse, J. T., Pondella, D. J., Miller, E. F., Murray, J. H. The illusion of plenty: hyperstability masks collapses in two recreational fisheries that target fish spawning aggregations. Can. Jour. Fish. Aquat. Sci. 68, 1705-1716 (2011).
- Buckland, S. T., Anderson, D. R., Burnham, K. P., Laake, J. L. Distance Sampling: Estimating abundance of biological populations. , Chapman and Hill. London. (1993).
- Ronconi, R. A., Burger, A. E. Estimating seabird densities from vessel transects: Distance sampling and implications for strip transects. Aquat. Bio. 4 (3), 297-309 (2008).
- Caselle, J. E., Rassweiler, A., Hamilton, S. L., Warner, R. R. Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected areas Recovery trajectories of kelp forest animals are rapid yet spatially variable across a network of temperate marine protected. Nat. Publ. Gr. , 1-14 (2015).
- Starr, R. M., Wendt, D. E., et al. Variation in Responses of Fishes across Multiple Reserves within a Network of Marine Protected Areas in Temperate Waters. Plos One. 10 (3), 0118502 (2015).
- Lester, S., Halpern, B., et al. Biological effects within no-take marine reserves: a global synthesis. Mar. Ecol. Prog. Ser. 384, 33-46 (2009).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}