Summary
Nous décrivons une nouvelle méthodologie pour la création de naturalistes objets 3-D et des catégories d'objets avec des variations de caractéristiques bien définies. Nous utilisons des simulations de processus biologiques de la morphogenèse et la phylogenèse pour créer de nouveaux objets virtuels, naturalistes 3-D et des catégories d'objets qui peuvent ensuite être rendus sous forme d'images visuelles ou des objets haptiques.
Abstract
Afin d'étudier quantitativement la perception des objets, qu'il s'agisse de la perception par les systèmes biologiques ou par des machines, il est nécessaire de créer des objets et des catégories d'objets avec précision définissable, de préférence naturaliste, les propriétés 1. En outre, des études sur l'apprentissage perceptif, il est utile de créer de nouveaux objets et catégories d'objets (ou classes d'objets) avec de telles propriétés 2.
Beaucoup de méthodes novatrices et utiles existent actuellement pour créer de nouveaux objets et catégories d'objets 3-6 (voir aussi refs. 7,8). Cependant, en général, les méthodes existantes trois grands types de défauts.
Tout d'abord, les variations de forme sont généralement imposées par l'expérimentateur 5,9,10, et peut donc être différente de la variabilité des catégories naturelles, et optimisé pour un algorithme de reconnaissance particulière. Il serait souhaitable que les variations surviennent indépendamment de l'externally imposé des contraintes.
Deuxièmement, les méthodes existantes ont du mal à saisir la complexité forme des objets naturels 11-13. Si l'objectif est d'étudier la perception des objets naturels, il est souhaitable que les objets et les catégories d'objets à être naturaliste, afin d'éviter les possibles facteurs de confusion et de cas particuliers.
Troisièmement, il est généralement difficile de mesurer quantitativement l'information disponible dans les stimuli créés par des méthodes conventionnelles. Il serait souhaitable de créer des objets et des catégories d'objets où l'information disponible peut être mesuré avec précision et, le cas échéant, systématiquement manipulé (ou «accordé»). Cela permet de formuler les tâches de reconnaissance d'objets sous-jacents en termes quantitatifs.
Nous décrivons ici un ensemble d'algorithmes ou méthodes qui correspondent aux trois critères ci-dessus. Morphogenèse virtuelle (VM) crée de nouveaux naturalistes, des objets virtuels en 3-D appelés «embryons numériques» parsimulant le processus biologique de l'embryogenèse 14. Virtual phylogenèse (VP) crée de nouvelles catégories d'objets naturalistes, en simulant le processus évolutif de la sélection naturelle 9,12,13. Les objets et les catégories d'objets créés par ces simulations peut être manipulé par diverses méthodes de morphing de générer des variations systématiques des caractéristiques de forme 15,16. Le vice-président et morphing méthodes peuvent également être appliquées, en principe, à de nouveaux objets virtuels autres que les embryons numériques, ou des versions virtuelles de objets du monde réel 9,13. Les objets virtuels créés de cette manière peuvent être rendus sous forme d'images visuelles à l'aide d'une boîte à outils graphique classique, avec des manipulations souhaitées de texture de la surface, l'éclairage, la taille, points de vue et de fond. Les objets virtuels peuvent également être «imprimé» comme des objets tactiles en utilisant un classique 3-D prototypeur.
Nous décrivons également certaines implémentations de ces algorithmes de calcul pour aider illustrer l'utilité potentielle des algorithmes. Il est important de distinguer les algorithmes de leurs implémentations. Les implémentations sont des démonstrations offertes uniquement comme une «preuve de principe» des algorithmes sous-jacents. Il est important de noter que, en général, une implémentation d'un algorithme de calcul ont souvent des limites que l'algorithme lui-même ne possède pas.
Ensemble, ces méthodes représentent un ensemble d'outils puissants et flexibles pour l'étude de la reconnaissance d'objets et de l'apprentissage perceptif par les systèmes biologiques et informatiques ressemblent. Avec les extensions appropriées, ces méthodes peuvent également s'avérer utiles dans l'étude de la morphogenèse et la phylogenèse.
Protocol
1. Création naturalistes virtuels en 3-D à l'aide d'objets VM
- Pour créer des embryons numériques, utiliser l'atelier d'embryon numérique (DEW, voir le tableau 1). Chaque essai génère un seul embryon 14, dont la forme est unique pour un ensemble donné de paramètres (ou "génotype") utilisés pour l'exécution donnée (figure 1). Les «cellules» de l'embryon sont représentés par des triangles 14.
- Exécuter le programme autant de fois que nécessaire pour générer le nombre voulu d'embryons.
- Si des formes plus complexes sont souhaitées, augmenter le nombre de cycles de croissance, c'est à dire le nombre de fois où les cellules de l'embryon se divisent. Notez que ce sera aussi ralentir le programme. S'il est nécessaire de créer des objets virtuels autres que les embryons numériques, utilisez les outils de modélisation disponibles dans le commerce en 3-D ou d'obtenir des objets virtuels auprès de fournisseurs commerciaux (tableau 1).
- Il est généralement conseillé d'enregistrer l'objet virtuels dans un format de fichier couramment utilisés, tels que OBJ, de sorte que les objets peuvent être facilement importées dans une boîte à outils de modélisation 3-D commerciale. À cette fin, le DEW écrit objets au format OBJ par défaut.
- Les stimuli visuels peuvent être générés en utilisant un ou plusieurs embryons numériques en utilisant une modélisation 3-D et de l'environnement de rendu (tableau 1). Utilisez standards opérations graphiques tels que varier l'orientation, la taille, l'éclairage, texture, surface, et d'arrière-plan pour créer les stimuli désirés (voir la figure 2).
2. Création de catégories d'objets naturalistes utilisant VP
- Pour générer des catégories d'objets, de générer des descendants (ou «enfants») de l'ancêtre donné (ou 'parent') objet en utilisant une combinaison souhaitée des processus à l'étape 1.1 ci-dessus (figure 3) 9,10,12,13.
- Certaines des méthodes décrites ci-dessous pour créer des variations de forme lisses telles que le morphing ou composantes principales (voir les étapes 3 et 4 ci-dessous), travail better si tous les objets de départ ont le même nombre de cellules et s'il existe une correspondance biunivoque entre les sommets des objets. Pour la création de ces objets, utilisez uniquement les processus VM qui ne changent pas le nombre de cellules et de préserver la correspondance un-à-un des sommets parmi les objets (voir, par exemple, des générations G 2 G 3 à la figure 3). Par exemple, la division cellulaire et la mort cellulaire programmée modifier le nombre de cellules, et de le rendre beaucoup plus difficile (mais pas impossible 17,18) pour déterminer one-to-one correspondance entre les sommets d'une paire d'objets.
Notez que les processus qui modifient le nombre de cellules dans un objet donné également modifier sa complexité forme. En général, plus le nombre de cellules, la plus grande complexité de la forme de l'objet et sa surface lisse. - Si nécessaire, aux objets virtuels autres que des embryons numériques peuvent être utilisées comme entrées pour VP (figure 4).
- Certaines des méthodes décrites ci-dessous pour créer des variations de forme lisses telles que le morphing ou composantes principales (voir les étapes 3 et 4 ci-dessous), travail better si tous les objets de départ ont le même nombre de cellules et s'il existe une correspondance biunivoque entre les sommets des objets. Pour la création de ces objets, utilisez uniquement les processus VM qui ne changent pas le nombre de cellules et de préserver la correspondance un-à-un des sommets parmi les objets (voir, par exemple, des générations G 2 G 3 à la figure 3). Par exemple, la division cellulaire et la mort cellulaire programmée modifier le nombre de cellules, et de le rendre beaucoup plus difficile (mais pas impossible 17,18) pour déterminer one-to-one correspondance entre les sommets d'une paire d'objets.
- Les objets à l'intérieur d'une catégorie donnée peut être en outre choisi de manière à obtenir une distribution donnée des fonctions 19. Par exemple, on peut éliminer sélectivement des objets de taille moyenne à partir d'une catégorie donnée afin de générer une distribution bimodale de la taille des objets.
- Il n'existe pas de méthode unique qui est universellement optimal pour mesurer la forme des informations disponibles pour toutes les catégories, et il n'y a qu'une seule méthode qui soit optimale pour classer tous les objets 20-22. Ainsi, l'expérimentateur doit choisir ces méthodes basées sur les catégories et les objectifs de calcul à la main 20-22. Étape 4 décrit une méthode couramment utilisée pour la manipulation de divers aspects de l'information forme disponible.
- La similitude entre une paire donnée de catégories peut être objectivement mesurée en utilisant des méthodes phylogénétiques disponibles 23,24. Par exemple, la verticale (ou «évolutif») distance entre une paire donnée de catégories, tel que mesuré par cl hiérarchiqueustering méthodes dans la boîte à outils de statistique R, est une mesure objective de 25,26 similitude catégorie.
3. Autres méthodes de création de variation de la forme: Digital Morphing
- Compte tenu de toute paire d'objets de sorte que chaque sommet d'un objet correspond à exactement un sommet de l'autre objet (. Par exemple des objets avec des one-to-one correspondance entre les sommets), morphing est 17,18,27-29 simple: Dans ce cas, les variations lisses (ou "morphes ') entre les deux objets sont produites par interpolation en douceur entre les sommets correspondants et les normales (figure 5). En fonction de la paire d'objets choisis, morphing se traduira par de nouvelles catégories ou des enfants supplémentaires dans une catégorie.
- Les objets présentés dans la figure 5 ont été créés en utilisant linéaire 27-29 morphing. Les objets peuvent être transformés (ou déformés) par une vaste gamme d'autres techniques de déformation disponibles 17,18.
- Pour créer une répartition souhaitée des formes morphed, choisissez les points d'interpolation en conséquence.
4. Autres méthodes de création de variation de la forme: Composants principaux
- Pour utiliser les composants principaux de générer des variations de forme, il faut d'abord déterminer les principales composantes 15. Principaux composants sont spécifiques à un ensemble donné d'objets utilisés pour déterminer les 26. Pour de bons résultats, utiliser au moins 30 objets avec one-to-one correspondance entre les sommets 26.
- Générer un objet en moyenne à partir d'un ensemble d'objets d'entrée souhaitée n, par calcul de la moyenne des coordonnées séparément et la normale de chaque sommet dans tous les objets. Ainsi, la coordonnée x d'un k donné sommet de égal à la moyenne des coordonnées X de k sommets de tous les n objets, et ainsi de suite.
- Utilisez la fonction Matlab princompà déterminer les composantes principales de n objets. Cela va générer n-1 vecteurs propres non nulles, avec le N-1 valeurs propres 26.
- Pour générer un nouvel objet A j partir d'un composant principal donné P i, P i multiplier par la valeur propre λ i correspondant désiré et un poids w j et ajouter à l'objet en moyenne:
A j = j + w λ i P i - Pièce unique w j va générer un objet unique. En modulant légèrement w, on peut créer des variations de forme lisse le long d'une composante principale donnée.
- Pour créer variations de forme le long d'une dimension de forme indépendante, répétez l'étape 4.4 utilisant un composant principal différent.
- Pour créer une répartition souhaitée des formes le long d'une composante principale donnée, utilisez la distribution désirée de w. </ Li>
- Pour créer une grille multidimensionnelle des formes, utilisez un ensemble de poids pour chacune des composantes principales de plusieurs:

5. Création de versions de Haptic objets 3-D
- 3-D 'Print-out' objets à l'aide d'un prototypeur 3-D (ou 3-D «imprimante»). Si nécessaire, ajuster la taille de l'objet et lisser la surface de l'objet avant de l'imprimer.
6. Une application Exemplar: Inférence bayésienne de la catégorie image
- Une tâche importante dans le traitement visuel est inférer la catégorie à laquelle un objet donné appartient observée. Bien que le mécanisme exact de cette déduction est inconnue, il ya des preuves de calcul et physiologiques 9,12,13,30-32 qu'elle implique l'utilisation de l'information sur les caractéristiques connues de l'objet dans l'image ci de déduire la catégorie de l'objet. Ici, nous allons Illustrate comment ce processus d'inférence peuvent travailler dans un cadre bayésien, et comment numérique embryons peuvent être utiles pour la recherche dans ce domaine.
- Par souci de simplicité, nous supposons que la tâche de catégorisation est binaire et implique catégorie K distinctif de la catégorie L (figure 3). Soit C la variable catégorie. Nous allons supposer que K = C ou C = L, selon que l'image observée appartient à la catégorie I ou K L. Une approche typique de catégorisation implique:
- Le calcul de la probabilité que la catégorie n'est donnée K l'information contenue dans l'image, notée p (C = K | I);
- Le calcul de la probabilité que la catégorie est la L compte tenu des informations dans l'image, notée p (C = L | I), et
- Cueillette de la catégorie avec la plus grande probabilité.
- Ensuite, nous supposons pour simplifierqu'il ya exactement une fonction F binaire. Cette fonction peut être soit présent dans l'image (notée F = 1) ou absent de l'image (notée F = 0). Cet exemple utilise le 'fragment informative »caractéristique de la figure 8. Fragments d'information ont d'abord été décrit par Ullman et ses collègues 33. Dans le cas présent, nous allons utiliser le modèle d'image de la figure 8 que la fonction, et une valeur seuil de 0,69. Pour déterminer si cette caractéristique est présente dans une image donnée (par exemple, l'image la plus à droite dans la rangée G3 de la figure 3), nous allons utiliser les étapes suivantes:
- Glisser sur ce modèle de tous les emplacements possibles de l'image et calculer, à chaque emplacement, la valeur absolue de la corrélation croisée normalisée entre le modèle et le sous-jacent sous-image.
- Sélectionnez l'emplacement de l'image avec la valeur la plus élevée (0,60 dans le cas présent).
- Si cette valeur est supérieure au seuil, de conclureque la fonction est présente, sinon conclure qu'il est absent. Dans notre cas, puisque la corrélation la plus élevée 0,60 est en dessous du seuil de 0,69, nous pouvons conclure que la fonction est absente dans cette image.
- La justification de l'utilisation de telles caractéristiques, et les mécanismes de sélection de fonctions et de déterminer les seuils sont au-delà de la portée de ce rapport, mais sont décrits en détail dans les références. 33, 30.
- Dans le cadre de la fonction de l'inférence basée, nous supposons que toutes les informations les extraits observateurs de l'image est contenue dans la valeur de cette fonction, i. e, que p (C | I). = p (C | F).
Par conséquent, la tâche devient celui de la détermination de la valeur de F dans l'image donnée (présent ou absent), calculer p (C = K | F) et p (C = L | F) pour que la valeur F, et en sélectionnant la catégorie d' le plus probalité. - Dans le cadre bayésien,

Par conséquent,
et

Noter que le dénominateur dans les deux équations sont les mêmes. Par conséquent, pour comparer p (C = K | F) et p (C = L | F), il n'est pas nécessaire de calculer le dénominateur, mais plutôt, il suffit de calculer les quantitésp (C = K | F) α p (C = K) p (F | C = K)
et
p (C = L | F) α p (C = L) p (F | C = L)
These sont parfois appelés «probabilités non normalisées. Le terme p (C) est appelé «préalable», et le terme p (F | C) est appelée «probabilité».- Par souci de simplicité, nous supposerons une 'plate' avant: p (C = K) = p (C = L) = 0,5.
- La tâche est maintenant de calculer p (F | C), la probabilité d'une valeur caractéristique donnée dans une image d'une catégorie C donné.
- Nous allons utiliser les six images de la catégorie L (figure 3) comme un exemple pour calculer p (F = 1 | C = L), la probabilité que la fonctionnalité est présente dans une image de la catégorie L.
- Pour calculer p (F = 1 | C = L), d'une part, faire toutes les images d'apprentissage appartenant à L. Encore une fois, ceux-ci sont présentés dans la figure 3.
- Pour chaque image, de déterminer si la valeur caractéristique est 1 (présent) Ou 0 (absence), tel que décrit dans (6.3.1) - (6.3.3). Dans notre cas, pour les six images de la figure 3, les valeurs sont: [0, 0, 1, 0, 1, 0].
- Calculer la fraction d'images dans lequel la valeur caractéristique est 1. Dans notre cas, il est 2/6 = 0,33.
- Par conséquent, p (F = 1 | C = L) = 0,33. Notez que pour obtenir des estimations précises, il faut utiliser au moins 30 images par classe.
- De la même manière, on peut calculer que p (F = 0 | C = L) = 0,67, p (F = 1 | C = K) = 0,83, p (F = 0 | C = K) = 0,17.
- Compte tenu de ces valeurs, l'inférence peut être effectuée. Supposons que l'on nous donne une nouvelle image (figure 9), et la tâche est de déterminer le libellé catégorie. Ceci est effectué comme suit:
- On détermine si la fonction F est présente dans l'image, tel que décrit dans (6.3.1) - (6.3.3). Dans notre cas, la feature est présent, alors F = 1.
- En utilisant les équations (1) et (2), et les valeurs calculées dans (6.7.5) - (6.7.6), on peut calculer que p (C = K | F = 1) = 0,42 et p (C = L | F = 1) = 0,17.
- Compte tenu de ces informations, il est rationnel de conclure que l'image est de la catégorie K, avec une confiance relativement faible.
- Il pourrait être intéressant et utile pour tester une telle approche dans un système biologique (par exemple, psychophysique). Dans ce cas, les prédictions comportementales pourraient être réalisés et comparés aux résultats des calculs tels que ceux obtenus dans (6.8.2). Pour faire des prédictions précises, de bonnes estimations de p (F | C) sont nécessaires. Ces estimations, cependant, peut être difficile à obtenir pour les objets familiers. La raison en est que le sujet estimation de p (F | C) n'est pas observable directement, et il est extrêmement difficile de le calculer car le sujetExposition préalable de l 'à des images naturelles est incontrôlable et inconnus. En revanche, si des embryons numériques sont utilisés pour les expériences, il est possible de contrôler précisément les embryons et les catégories d'embryon le sujet est exposé. Il est donc facile de calculer les quantités d'intérêt à partir exactement les mêmes données le sujet a été exposé. Le fait que l'apparence embryons »est naturaliste est utile, car elle permet de penser que le sujet utilise la stratégie de catégorisation comme des catégories naturelles.




Representative Results
VM peut être utilisé pour générer une offre quasi illimitée de formes nouvelles 3-D. Certains embryons exemplaires numériques générées en utilisant l'algorithme VM sont indiqués dans la partie inférieure de la figure 1. Chacun de ces 16 embryons ont été générés en utilisant le programme «growEmbryos.exe» dans les outils d'embryons numériques pour Cygwin (voir le tableau 1) pour une croissance de 40 cycles. Tous les autres paramètres de croissance ont été définies en interne par le programme. La plupart de ces paramètres sont constants (c.-à-identiques d'un embryon à l'autre). Quelques paramètres tels que l'emplacement et la force des sources morphogènes, étaient des paramètres aléatoires définies en interne par le programme de manière indépendante pour chaque essai. Les variations de forme entre ces 16 embryons se pose uniquement en raison des variations de ces paramètres aléatoires.
Quelques exemples de texturation de surface 34,35 utilisant des textures choisies arbitrairement sont présentés dans la figure 2A. Scènes visuelles d'uncomplexité rbitrary peuvent être créés en utilisant un commerce modélisation 3-D et de l'environnement de rendu, comme le montre la figure 2B.
«Arbre généalogique» Un représentant généré par VP à partir d'embryons numériques est illustré à la figure 3. Arbres comparables peuvent également être construits en utilisant des objets autres que des embryons numériques, comme le montre la figure 4. Notez que dans les deux cas, les objets qui partagent un ancêtre commun carrément constituent une catégorie, bien que l'expérimentateur peut également choisir de définir une catégorie comme n'importe quel autre ensemble d'objets. Il est à noter sur la figure 4 que notre implémentation actuelle de la machine virtuelle et les algorithmes VP tend à produire relativement lisses, surfaces courbes, par opposition aux objets dentelés ou appartement. Il est également intéressant de noter que ceci est sans doute la limitation de notre mise en œuvre de ces algorithmes et les algorithmes eux-mêmes ne sont pas, car les processus biolological peut produire objectifsts avec des surfaces planes et les contours irréguliers (p. ex., rose feuille).
Les figures 5 et 6 illustrent les résultats typiques de deux méthodes qui peuvent être utilisés en plus ou à la place de vice-président, pour créer des variations de principe à la forme des objets et catégories d'objets.
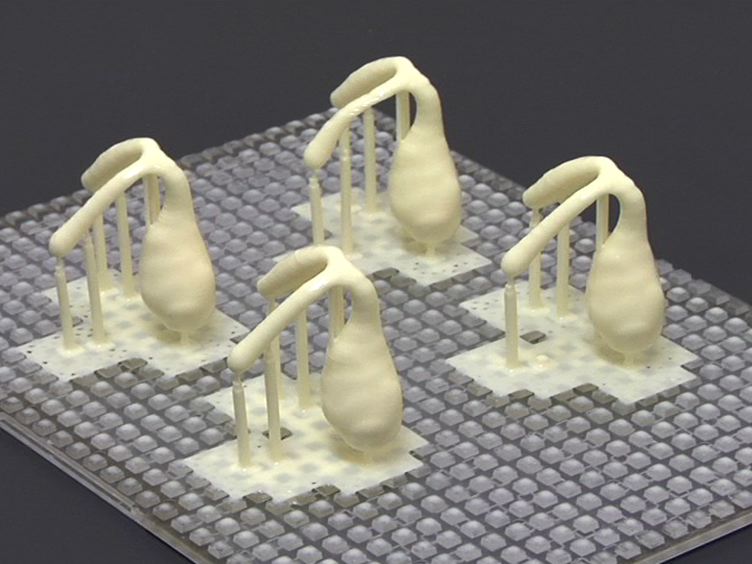
Le panneau supérieur de la figure 7 illustre les rendus visuels de deux embryons numériques, et le panneau inférieur de la figure 7 illustre les impressions correspondantes générées par un commerce en 3-D prototypeur.
Les figures 8 et 9 illustrent les procédures décrites à la section 6 pour l'utilisation de fragments d'image de classer un objet donné visuelle.

Figure 1. Morphogenèse virtuelle. 14. Embryons numériques peuvent être générés en simulant une ou plusieurs de quelques-uns des principaux processus de l'embryogenèse biologique: la division cellulaire médiée par morphogène, la croissance cellulaire, le mouvement cellulaire et la mort cellulaire programmée 7,8,36,37. Chaque cycle commence par un icosaèdre (indiqué dans le panneau du haut), et génère un embryon unique, en fonction des paramètres VM (ou le «génotype») de cet embryon. Ainsi, les 16 embryons dans le panneau du bas ont des formes différentes, car ils ont tous génotypes différents. Notez que plus simples ou plus complexes formes peuvent être générés en fonction des besoins (par exemple, pour stimuler les neurones de façon optimale à un niveau donné de la hiérarchie visuelle) en manipulant le génotype de l'embryon. Tous les procédés mentionnés ci-dessus, sauf embryogénétique mort cellulaire programmée ont été simulées dans la production des embryons montré. Simulation de la mort cellulaire programmée est particulièrementutile pour créer des indentations ciblés (non représenté).

Figure 2. Création de stimuli visuels numériques utilisant des embryons. Comme tout objet virtuel en 3-D, les embryons numériques peuvent être manipulées pour créer graphiquement des scènes visuelles d'une complexité arbitraire en utilisant une norme 3-D toolkit graphique. Cette figure illustre quelques manipulations courantes. (A) Le même embryon numérique est texturé avec de nombreuses textures différentes, et éclairé par une source de lumière invisible en haut à gauche. (B) Une scène camouflé est créé par le redimensionnement et la réorientation de l'embryon numérique et numériquement le plaçant dans le contexte où il se trouvait texturé avec. L'embryon numérique peut être trouvé dans «la vue» dans le quadrant inférieur droit. Pour d'autres exemples de stimuli visuels créationés utilisant des embryons numériques, voir refs. 9,10,12-14,38.

Figure 3. Création de catégories d'embryons numériques à l'aide VP. L'algorithme VP émule l'évolution biologique, en ce que dans les deux cas, les objets et les catégories de nouveaux objets apparaissent comme des variations héréditaires s'accumulent de manière sélective. A chaque génération G i, les embryons sélectionnés procréer, ce qui conduit à la génération G i +1. Les descendants héritent des caractéristiques de forme de leurs parents, mais reviennent variations de forme de leur propre chef (tel que déterminé par de petites variations dans leur génotype) dans leur développement. Cette figure montre un «arbre généalogique» de trois générations de descendants à partir d'un seul ancêtre commun, un icosaèdre. Notez que, dans ce cas, la complexité augmente forme à partir de l'icosaèdre à génératG 1 d'ions, mais pas à partir de G 1 ultérieur. C'est parce augmentation du nombre de cellules (par exemple., La division cellulaire) a été autorisé à partir de l'icosaèdre à la génération G 1, mais pas à partir de G 1 en avant. En général, la division cellulaire tend à augmenter la complexité de forme, tandis que d'autres processus morphogénétiques tels que le mouvement des cellules et la forme de changement de cellule sans modifier la croissance de la complexité globale de la forme.

Figure 4. VP en utilisant des objets virtuels autres que les embryons numériques. Ce chiffre permet d'illustrer le principe général que les objets virtuels autres que les embryons numériques peuvent être utilisées comme entrée à VP. L'algorithme de vice-président dans sa forme actuelle peut fonctionner sur n'importe quel objet virtuel en 3-D dont la surface se compose uniquement de triangles. Génération G 1 comprised (de gauche à droite) une gourde, diamant, masque, pomme, rock, et de cactus. Notez que les objets de génération G 1 dans cette figure n'ont pas un ancêtre commun, parce que vice-président ne l'exige pas. Objets en G 2 et G 3 représentent les descendants de la roche en G 1. Pas de divisions cellulaires ont été autorisés dans toutes les générations, de sorte que toutes les variations de forme résulte uniquement du mouvement et / ou de la croissance de l'individu «cellules» de l'objet donné.

Figure 5. En utilisant le morphing pour créer des variations lisses en forme. Morphing consiste à prendre deux objets donnés (à l'extrême gauche et l'extrême droite embryon dans ce chiffre) et en calculant les objets intermédiaires (intervenant embryons) par interpolation entre les sommets correspondants de l'désigner deuxobjets d. Dans le cas représenté, tous les sommets ont été interpolées en utilisant le facteur scalaire même, résultant en un morphing linéaire. Cependant, il est également possible de transformer les objets non-linéaire (non représentée). Morphing est mathématiquement simple quand il ya une exacte one-to-one correspondance entre les sommets de deux objets, comme dans le cas représenté. Toutefois, il est possible, en principe, de se transformer entre deux objets virtuels donnés indépendamment du fait de leurs sommets correspondent pas exactement, bien qu'il n'y ait pas de méthode unique de principe pour le faire 17,18.

Figure 6. Utilisation des composants principaux pour créer des variations lisses en forme. (A) embryon moyenne. Cet embryon représente la moyenne arithmétique des 400 embryons (200 chacune des catégories K et L dansFigure 3). Principales composantes ont été calculés comme décrit à l'étape 4.3. Notez que les composants principaux représentent mutuellement indépendants, les dimensions de forme abstraites des 400 embryons (non représentée) 25,26. 399 400 embryons donnent composantes non nulles principaux 25,26, qui, ensemble, représentent la totalité de la variance, ou l'information de forme, disponible collectivement dans les embryons. Par convention, les principaux composants sont disposés dans l'ordre décroissant de leurs valeurs propres, ou la proportion de la variance totale ils expliquent 25,26. Dans ce cas, les deux premières composantes principales ont représenté respectivement 73% et 19% de l'information de forme disponible dans les 400 embryons. (B) Les embryons qui représentent des poids différents (ou plus précisément, les valeurs propres pondérés) des composantes principales 1. Les poids varient de +2 (extrême gauche) à -2 (extrême droite) par tranches égales de -0,2. (C) Les embryons qui représentent différents poids des Composants principauxent 2. Les poids varient également, de +2 (extrême gauche) à -2 (extrême droite) par tranches égales de -0,2. Notez que la manipulation des composants principaux n'est pas exclusivement manipuler n'importe quelle partie du corps, spécifique de l'embryon (p. ex., Les ailes de l'embryon dans le cas représenté). Cependant, si nécessaire, les parties du corps de virtuel en 3-D des objets peuvent être manipulés de quelque façon arbitraire défini par l'utilisateur en utilisant la plupart des 3-D disponibles dans le commerce environnements de modélisation (non représentée).

Figure 7. Création d'objets haptiques. Virtual objets 3-D peut être «imprimé» comme des objets tactiles en utilisant un standard, disponible dans le commerce en 3-D 'imprimante' ou prototyper. Cette figure montre embryons numériques rendus comme des objets visuels (rangée du haut) ou que les objets correspondants haptiques (rangée du bas). Les objets tactiles shown dans cette figure ont été imprimés à environ 6 cm de large (échelle = 1 cm), bien que les objets peuvent être imprimés à des tailles beaucoup plus petites ou plus grandes.

Figure 8. Un modèle pour un fragment d'exemple instructif. Dans cet exemple, le modèle a un seuil de 0,69 qui lui est associé.

Figure 9. Une nouvelle image pour lesquels la catégorie d'objet n'est pas connue et doit être déterminée.
Discussion
Utilité des VM et VP de la recherche en sciences cognitives
Nous avons déjà décrit l'utilité de VM et VP en détail l9 ,10,12-14. En bref, VM, en particulier la méthodologie embryon numérique, est utile car elle fournit une méthode fondée sur des principes et flexible pour la création de roman, mais naturalistes objets 3-D 14. De même, VP fournit une méthode fondée sur des principes de créer des catégories naturalistes 9,10,12,13. Il est à noter que les catégories d'objets générés par VP partagent des caractéristiques avec de nombreuses catégories d'objets dans la nature, y compris le fait que les catégories ont tendance à être de nature hiérarchique, et les variations de caractéristiques à l'intérieur et entre les catégories de survenir indépendamment de l'expérimentateur et les algorithmes de classification les 39.
Limitations actuelles et orientations futures
Trois limites actuelles de notre protocole et les orientations pour les travaux futurs, ils suggèrentsont particulièrement remarquables: d'abord, à la fois VM et VP simuler des processus biologiques. Bien que nous montrent que les non-biologiques des objets virtuels peuvent être utilisés comme substrats pour ces processus, les processus sous-jacents sont encore biologiquement motivé. Cependant, les objets naturels - biologiques et non biologiques semblables - subissent des changements de forme en raison de non-biologiques forces. Par exemple, les roches peuvent changer de forme en raison de processus géologiques tels que l'érosion ou de la sédimentation. De nouvelles catégories de roche peut résulter de ces autres processus géologiques. Il devrait être relativement simple d'intégrer ces processus dans le répertoire des algorithmes disponibles changer de forme.
La deuxième limitation majeure de notre protocole est que son répertoire actuel de changements de forme dynamique est plutôt limitée. Il est souhaitable d'incorporer un plus grand éventail de changements de forme, telles que le mouvement biologique, ou le mouvement dû à des forces extérieures telles que le vent, l'eau ou la gravité. Nous nous attendons à ce qu'il will être relativement simple à mettre à profit les algorithmes connus d'animation par ordinateur pour mettre en œuvre ces changements de forme dynamiques.
La troisième limite importante de notre protocole est que VM ne prend actuellement pas inclure de nombreux autres processus morphogénétiques connus, y compris, notamment, la gastrulation 36. Elle omet également d'intégrer des contraintes connues, telles que le fait que la morphogénèse des plantes est médiée entièrement par la croissance, avec le mouvement des cellules peu ou pas possible, car des 36 parois cellulaires. De la même manière, vice-président ne comprend pas les autres processus phylogénétiques connus tels que la dérive génétique 40. S'attaquer à ces limitations aiderait grandement faciliter l'utilisation de notre protocole en développement, les simulations écologiques et évolutifs.
Disclosures
Aucun conflit d'intérêt déclaré.
Acknowledgments
Ce travail a été soutenu en partie par le Laboratoire de recherche de l'armée américaine et l'US Army Research Office subvention W911NF1110105 et NSF subvention IOS 1147097to Jay Hegde. Soutien a également été apporté par une subvention pilote de Jay Hegde de l'Institut de la Vision Découverte de l'Université Georgia sciences de la santé. Daniel Kersten a été financée par des subventions de l'ONR N00014-05-1-0124 et NIH R01 EY015261 et en partie par WCU (World Class University) financé par le Ministère de l'éducation, de la science et de la technologie par le biais de la Fondation Nationale de la Recherche de Corée (R31-10008 ). Karin Hauffen a été soutenu par le Programme d'apprentissage en recherche de premier cycle (URAP) de l'armée américaine.
Materials
| Name | Company | Catalog Number | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. | |||
References
- Palmeri, T. J., Gauthier, I.
- Seger, C. A., Miller, E. K.
- Perceptual Learning. Fahle, M., Poggio, T. , MIT Press. (2002).
- Ashby, F. G., Maddox, W. T.
- Gauthier, I., Tarr, M. J. Becoming a "Greeble" expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Fragment-based learning of visual categories. Bart, E., Hegdé, J., Kersten, D. Cosyne 2008 Conference, 2008 Feb 28-Mar 2, Salt Lake City, , Cosyne. Salt Lake City. 121-12 (2008).
- Ball, P. Nature's patterns : a tapestry in three parts. , Oxford University Press. (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D.
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M.
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. Numerical geometry of non-rigid shapes. , Springer. (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. Pattern classification. , 2nd edn, Wiley. (2001).
- Bishop, C. M. Pattern recognition and machine learning. , Springer. (2006).
- Theodoridis, S., Koutroumbas, K. Pattern recognition. , 3rd edn, Academic Press. (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , 4th edn, W.H. Freeman and Co. (2011).
- Tuffery, S. Data mining and statistics for decision making. , Wiley. (2011).
- Crawley, M. J. Statistical Computing: An Introduction to Data Analysis using S-Plus. , Wiley. (2002).
- Venables, W. N., Ripley, B. D. Modern Applied Statistics with S. , Springer. (2003).
- Beier, T., Neely, S.
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. Warping and morphing of graphical objects. , Morgan Kaufmann Publishers. (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , IEEE Computer Society Press. (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. Computer graphics. , Nova Science Publishers. (2011).
- Lengyel, E. Mathematics for 3D game programming and computer graphics, third edition. , 3rd Ed, Cengage Learning. (2011).
- Gilbert, S. F. Developmental biology. , 9th edn, Sinauer Associates. (2010).
- Gilbert, S. F., Epel, D. Ecological developmental biology : integrating epigenetics, medicine, and evolution. , Sinauer Associates. (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E.
- Futuyma, D. J. Evolution. , 2nd edn, Sinauer Associates. (2009).