Summary
Vi beskriver en ny metod för att skapa naturalistiska 3-D objekt och kategorier objekt med exakt definierade funktionen variationer. Vi använder simuleringar av biologiska processer morfogenes och fylogeni att skapa nya, naturalistiska virtuella 3-D objekt och kategorier objekt som sedan kan göras som visuella bilder eller objekt haptiska.
Abstract
För kvantitativt studera objekt uppfattning, oavsett om det uppfattning biologiska system eller maskiner, måste man skapa objekt och kategorier objekt med exakt definierbara, helst naturalistisk, fastigheter 1. Dessutom, för studier av perceptuella lärande, är det lämpligt att skapa nya objekt och kategorier objekt (eller objektklasser) med sådana egenskaper 2.
Många innovativa och användbara metoder finns för närvarande för att skapa nya objekt och kategorier objekt 3-6 (se även ref. 7,8). Men generellt sett, de befintliga metoderna har tre huvudtyper av brister.
Först är form variationer införs i allmänhet av försöksledaren 5,9,10, och kan därför skilja sig från variationen i naturliga kategorier, och optimerad för en viss erkännande algoritm. Det skulle vara önskvärt att ha variationer uppstår oberoende av externally införs begränsningar.
Andra de befintliga metoderna har svårt att fånga formen komplexitet naturföremål 11-13. Om målet är att studera naturliga objekt uppfattning är det önskvärt för objekt och kategorier objekt som skall naturalistisk, för att undvika eventuella förvirrar och speciella fall.
För det tredje är det i allmänhet svårt att kvantitativt mäta den tillgängliga informationen i de stimuli som skapas genom konventionella metoder. Det skulle vara önskvärt att skapa objekt och kategorier objekt där den tillgängliga informationen kan exakt mätas och vid behov systematiskt manipulerade (eller "trimmad"). Detta gör att man kan formulera de underliggande uppgifterna objektdetektering i kvantitativa termer.
Här beskriver vi en uppsättning algoritmer, eller metoder, som uppfyller alla tre av ovanstående kriterier. Virtual morfogenes (VM) skapar nya, naturalistiska virtuella 3-D objekt kallade digitala embryon avsimulera biologiska processen embryogenes 14. Virtuell fylogeni (VP) skapar nya, naturalistiska objekt kategorier genom att simulera evolutionära process av naturligt urval 9,12,13. Objekt och kategorier objekt som skapas av dessa simuleringar kan ytterligare manipuleras av olika morphing metoder att generera systematiska variationer i form egenskaper 15,16. VP och morphing metoder kan också tillämpas i princip till nya virtuella föremål än digitala embryon eller virtuella versioner av verkliga objekt 9,13. Virtuella objekt som skapats på detta sätt kan återges som visuella bilder med hjälp av en konventionell grafisk verktygslåda, med önskade manipulationer av ytstruktur, belysning, storlek, perspektiv och bakgrund. De virtuella föremålen kan också "skrivas" som haptiska objekt med en konventionell 3-D Prototyper.
Vi beskriver också några implementeringar av dessa beräkningsalgoritmer för att hjälpa illustrecentrat den potentiella användbarheten av algoritmerna. Det är viktigt att skilja de algoritmer från deras implementeringar. De implementationer är demonstrationer som erbjuds endast som en "proof of principle" de underliggande algoritmerna. Det är viktigt att notera att i allmänhet en implementering av en computational algoritm ofta har begränsningar som algoritmen själv inte har.
Tillsammans dessa metoder representerar en uppsättning kraftfulla och flexibla verktyg för att studera objekt erkännande och perceptuella lärande genom biologiska och beräkningsmässiga system lika. Med lämpliga förlängningar, kan dessa metoder visa sig också användbara vid studium av morfogenes och fylogeni.
Protocol
1. Skapa Naturalistiska Virtual 3-D objekt med VM
- Att skapa digitala embryon, använda den digitala Embryo Workshop (DEW, se tabell 1). Varje försök genererar en enda embryo 14, vars form är unik för en given uppsättning av inställningar (eller "genotyp") används för given körning (figur 1). De "celler" av embryot representeras som trianglar 14.
- Kör programmet så många gånger som behövs för att generera det önskade antalet embryon.
- Om mer komplexa former önskas, öka antalet tillväxt cykler, dvs antalet gånger cellerna i embryot kommer att dela. Observera att detta också kommer att sakta ner programmet. Om det är nödvändigt att skapa virtuella föremål än digitala embryon, använda kommersiellt tillgängliga 3-D modelleringsverktyg eller få virtuella objekt från kommersiella leverantörer (tabell 1).
- Det är i allmänhet tillrådligt att spara det virtuella föremåletsi ett vanligt filformat, till exempel OBJ, så att föremålen lätt kan importeras till en kommersiell 3-D modellering verktygslåda. I detta syfte skriver DEW objekt i OBJ-format som standard.
- Visuella stimuli kan genereras med användning av en eller flera digitala embryon med en 3-D-modellering och rendering miljö (tabell 1). Använd vanliga grafiska operationer som att variera orientering, storlek, belysning, ytstruktur och bakgrund för att skapa de önskade stimuli (se figur 2).
2. Skapa Naturalistiska objekt Kategorier som använder VP
- För att generera objekt kategorier generera ättlingar (eller "barn") av den givna förfader (eller "överordnade") objekt med en önskad kombination av processerna i steg 1,1 ovan (Figur 3) 9,10,12,13.
- Vissa metoder som beskrivs nedan för att skapa mjuka form variationer, såsom morphing eller huvudkomponenter (se steg 3 och 4 nedan), arbete BETTer om alla ingående objekt har samma antal celler och om det finns ett-till-ett-förhållande mellan spetsarna hos objekten. För att skapa sådana föremål, använd bara de VM processer som inte kommer att förändra antalet celler och bevara en-till-en motsvarighet hörn bland objekten (se t.ex. generationer G 2 till G 3 i figur 3). Exempelvis celldelning och programmerad celldöd förändra antalet celler, och gör det mycket svårare (men inte omöjligt 17,18) för att bestämma en-till-en-överensstämmelse mellan spetsarna hos ett givet par av föremål.
Observera att de processer som förändrar antalet celler i ett givet föremål också ändra dess form komplexitet. I allmänhet, ju större antalet celler, desto större formen komplexitet föremålet och slätare dess yta. - Vid behov virtuella föremål andra än digitala embryon kan användas som insignaler till VP (Figur 4).
- Vissa metoder som beskrivs nedan för att skapa mjuka form variationer, såsom morphing eller huvudkomponenter (se steg 3 och 4 nedan), arbete BETTer om alla ingående objekt har samma antal celler och om det finns ett-till-ett-förhållande mellan spetsarna hos objekten. För att skapa sådana föremål, använd bara de VM processer som inte kommer att förändra antalet celler och bevara en-till-en motsvarighet hörn bland objekten (se t.ex. generationer G 2 till G 3 i figur 3). Exempelvis celldelning och programmerad celldöd förändra antalet celler, och gör det mycket svårare (men inte omöjligt 17,18) för att bestämma en-till-en-överensstämmelse mellan spetsarna hos ett givet par av föremål.
- Objekten i en given kategori kan vidare väljas så att man uppnår en given fördelning av funktionerna 19. Till exempel, kan ett selektivt eliminera medelstora föremål från en viss kategori för att generera en bimodal fördelning av objektets storlek.
- Det finns ingen enskild metod som är allmänt optimalt för att mäta den tillgängliga formen information för alla kategorier, inte heller finns det en enda metod som är optimal för att kategorisera alla objekt 20-22. Således måste experimentor välja dessa metoder baserade på de kategorier och beräkningsmodeller mål till hands 20-22. Steg 4 beskriver en vanligt använd metod för att manipulera olika aspekter av tillgänglig forminformation.
- Likheten mellan ett givet par av kategorier kan objektivt mätas med tillgängliga fylogenetiska metoder 23,24. Till exempel, som den vertikala (eller "evolutionära") Avståndet mellan ett givet par av kategorier, mätt med hierarkisk CLustering metoder i R statistiska verktygslådan, är ett objektivt mått på kategori likhet 25,26.
3. Ytterligare metoder för att skapa Shape Variation: Digital Morphing
- Gett någon par objekt så att varje hörn av ett objekt motsvarar exakt en spets av det andra objektet (. Dvs objekt med ett-till-ett-förhållande mellan hörn), är morphing enkel 17,18,27-29: I denna fallet släta variationer (eller "morfar") mellan de två objekten som produceras av mjukt interpolera mellan motsvarande hörn och normaler (Figur 5). Beroende på paret av valda objekt kommer morphing att resultera i nya kategorier eller ytterligare barn inom en kategori.
- Föremålen som visas i figur 5 har skapats med linjär morphing 27-29. Objekten kan morphed (eller skev) med ett brett utbud av andra tillgängliga deformation tekniker 17,18.
- För att skapa en önskad fördelning av förvandlats former välja interpolation pekar därefter.
4. Ytterligare metoder för att skapa Shape Variation: huvudkomponenter
- För att kunna använda huvudsakliga komponenter för att generera form variationer måste man först bestämma de viktigaste komponenterna 15. Huvudkomponenter är specifika för den givna uppsättning objekt som används för att bestämma dem 26. För bra resultat, använd minst 30 objekt med en-till-en korrespondens mellan hörnen 26.
- Generera en genomsnittlig objekt från en önskad uppsättning av n ingående objekt, genom att separat medelvärdesbildning av koordinaterna och den normala av varje spets i alla objekt. Sålunda, x-koordinaten för en given spets k bör vara medelvärdet av x-koordinaterna för vertex k alla n objekt, och så vidare.
- Använd Matlab-funktionen princompatt bestämma huvudsakliga komponenterna i de n objekten. Detta kommer att generera n-1 icke-noll egenvektorer, tillsammans med motsvarande N-1 egenvärden 26.
- För att generera ett nytt objekt En j från en given huvudkomponent P i, multiplicera P i med motsvarande egenvärde λ i och en önskad vikt w j och lägga till den genomsnittliga objektet:
A j = + w j λ i Pi - Varje unik w j kommer att generera en unik objekt. Genom jämnt varierande vikt, kan man skapa mjuka form variationer längs en given huvudkomponent.
- För att skapa form variationer längs en oberoende form dimension, upprepa steg 4,4 med en annan huvudkomponent.
- För att skapa en önskad fördelning av former längs en given huvudkomponent använder önskade fördelningen av w. </ Li>
- För att skapa en flerdimensionell rutnät former, använder en uppsättning vikter för varje av flera huvudkomponenter:

5. Skapa haptisk Versioner av 3-D objekt
- "Utskrift" 3-D objekt med en 3-D Prototyper (eller 3-D skrivare "). Om nödvändigt, justera objektets storlek och jämna objektets yta före utskrift.
6. En förebild Användning: Bayesiansk inferens av Image Kategori
- En viktig uppgift i visuell bearbetning dra slutsatsen den kategori som en given observerade tillhör. Även om den exakta mekanismen för denna slutsats är okänd, finns det både beräkningsmässiga och fysiologiska bevis 9,12,13,30-32 att den innefattar användning av information om kända egenskaper hos objektet i den givna bilden att sluta sig till kategorin av objektet. Här kommer vi att ILLUSTRAte hur denna inferential process kan arbeta i en Bayesiansk ram, och hur digitala embryon kan vara användbara för forskning på detta område.
- För enkelhetens skull antar vi att den kategorisering uppgiften är binär och innebär skilja kategori K från kategori L (Figur 3). Låt C vara kategorin variabeln. Vi kommer att dra slutsatsen att C = K eller C = L enligt huruvida den observerade bilden I tillhör kategori K eller L. En typisk inställning till kategorisering innebär:
- Datorer sannolikheten att kategorin är K givet den information i bilden, betecknas p (C = K | I);
- Datorer sannolikheten att kategorin är L givet den information i bilden, betecknas p (C = L | I), och
- Plocka kategorin med högre sannolikhet.
- Därefter kommer vi att anta för enkelhets skullatt det är precis en binär funktion F. Denna funktion kan vara antingen närvarande i bilden (betecknat F = 1) eller frånvarande från bilden (betecknat F = 0). Detta exempel kommer att använda "informativa fragmentet" funktionen som visas i figur 8. Informativa fragment beskrevs först av Ullman och kollegor 33. I förevarande fall kommer vi att använda bilden mallen som visas i figur 8 som funktionen och ett tröskelvärde på 0,69. För att avgöra om den här funktionen finns i en given bild (säga, längst till höger bilden i rad G3 i figur 3), kommer vi att använda följande steg:
- Skjut denna mall över alla möjliga platser i bilden och beräkna, vid varje plats, det absoluta värdet av normaliserad korskorrelation mellan mallen och den underliggande delbilden.
- Markera bilden plats med det högsta värdet (0,60 i detta fall).
- Om detta värde är över tröskeln, slutaatt funktionen är närvarande, annars dra slutsatsen att det är frånvarande. I vårt fall, eftersom den högsta korrelationen 0,60 är under tröskelvärdet på 0,69, drar vi slutsatsen att funktionen är frånvarande i denna bild.
- Skälet att använda sådana funktioner och mekanismer välja funktioner och bestämma deras trösklar ligger utanför ramen för denna rapport, men beskrivs i detalj i refs. 33, 30.
- Inom ramen för funktionen baserad inferens, antar vi att alla uppgifter som observatören utdrag ur bilden finns i värdet av denna funktion, dvs. e, att p (C | I). = p (C | F).
Därför blir uppgiften att fastställa värdet på F i den givna bilden (närvarande eller frånvarande), beräkning p (C = K | F) och p (C = L | F) för detta värde F och välja den kategori med den högre probabihet. - Inom Bayes ramen

Därför,
och

Observera att nämnaren i de två ekvationerna är densamma. Därför, för att jämföra P (C = K | F) och p (C = L | F), är det inte nödvändigt att beräkna nämnaren, utan det är tillräckligt att beräkna kvantiteterp (C = K | F) α p (C = K) p (F | C = K)
och
p (C = L | F) α p (C = L) p (F | C = L)
ThESE kallas ibland "onormerat sannolikheter". Termen p (C) kallas "äldre", och termen p (F | C) kallas "sannolikhet".- För enkelhetens skull antar vi en "platt" tidigare: p (C = K) = p (C = L) = 0,5.
- Uppgiften är nu att beräkna p (F | C), sannolikheten för ett givet inslag värde i en bild av en viss kategori C.
- Vi kommer att använda de sex bilderna i kategori L (Figur 3) som ett exempel för att beräkna p (F = 1 | C = L), sannolikheten att funktionen finns i en bild av kategori L.
- För att beräkna p (F = 1 | C = L), först ta alla utbildningar bilder som tillhör L. Återigen är dessa visas i figur 3.
- För varje bild, fastställa huruvida funktionen värdet är 1 (närvarande) Eller 0 (frånvarande), såsom beskrivits i (6.3.1) - (6.3.3). I vårt fall, för de sex bilder i figur 3, är värdena: [0, 0, 1, 0, 1, 0].
- Beräkna fraktionen av bilder där funktionen värdet är 1. I vårt fall är det 2/6 = 0,33.
- Därför, p (F = 1 | C = L) = 0,33. Observera att för att få exakta beräkningar bör man använda minst 30 bilder per klass.
- På ett liknande sätt, kan vi beräkna att p (F = 0 | C = L) = 0,67, p (F = 1 | C = K) = 0,83, p (F = 0 | C = K) = 0,17.
- Med tanke på dessa värden, kan inferens göras. Antag att vi får en ny bild (Figur 9), och uppgiften är att bestämma dess kategori etikett. Detta utförs enligt följande:
- Vi bestämmer huruvida funktionen F är närvarande i bilden, såsom beskrivits i (6.3.1) - (6.3.3). I vårt fall, den FEAturen är närvarande, så F = 1.
- Användning av ekvationerna (1) och (2), och de värden som beräknats i (6.7.5) - (6.7.6), kan vi beräkna att p (C = K | F = 1) = 0,42 och p (C = L | F = 1) = 0,17.
- Med tanke på denna information är det rationellt att dra slutsatsen att bilden är från kategori K, med relativt låg tillförsikt.
- Det kan vara intressant och nyttigt att testa en sådan strategi i ett biologiskt system (exempelvis psychophysically). I detta fall, skulle beteendemässiga förutsägelser göras och jämförs beräkningsresultat såsom de som erhålles i (6.8.2). För att göra korrekta prognoser, bra uppskattningar av p (F | C) är nödvändiga. Sådana beräkningar kan dock vara svårt att få till välbekanta föremål. Anledningen är att en patients uppskattning av p (F | C) inte observeras direkt, och det är extremt svårt att beräkna den eftersom ämnetÄr tidigare exponering för naturliga bilder är okontrollerbar och okända. Om däremot digitala embryon användes för experimenten, så är det möjligt att exakt kontrollera vilka embryon och kategorier embryo motivet exponeras för. Detta gör det enkelt att beräkna de kvantiteter av intresse från exakt samma data ämnet var utsatta för. Det faktum att embryon utseende är naturalistisk är bra, eftersom det gör det sannolikt att ämnet använder samma kategorisering strategi som med naturliga kategorier.




Representative Results
VM kan användas för att generera en praktiskt taget obegränsad tillgång till nya 3-D former. Vissa exemplifierande digitala embryon genereras med hjälp av VM-algoritmen visas i den nedre panelen i figur 1. Var och en av dessa 16 embryon genererades genom att använda "growEmbryos.exe-programmet i den digitala embryot verktyg för Cygwin (se tabell 1) för 40 tillväxt cykler. Alla andra tillväxtparametrar sattes internt av programmet. De flesta av dessa parametrar var konstant (dvs. identiska från ett embryo till nästa). Några parametrar såsom lokalisering och styrka av morfogen källor, var slumpmässiga parametrar som internt av programmet självständigt för varje körning. Formen variationer bland dessa 16 embryon uppstod enbart på grund av variationerna i dessa slumpmässiga parametrar.
Några exempel på yttexturering 34,35 användning några godtyckligt valda texturer visas i figur 2A. Visuella scener i enrbitrary komplexitet kan skapas med hjälp av en kommersiellt tillgänglig 3-D modellering och rendering miljö, som visas i figur 2B.
En representant "släktträd" som genereras av VP hjälp av digitala embryon visas i figur 3. Jämförbara träd kan också konstrueras med användning av andra föremål än digitala embryon, såsom visas i figur 4. Notera att i båda fallen, de objekt som delar en gemensam förfader rakt utgör en kategori, även om försöksledaren kan också välja att definiera en kategori som alla andra uppsättning objekt. Det är värt att notera från figur 4 att vår nuvarande genomförandet av VM och VP algoritmer tenderar att ge relativt släta, krökta ytor, i motsats till taggiga eller platta föremål. Det är också värt att notera att detta är förmodligen en begränsning av vår genomförandet av dessa algoritmer och inte de algoritmer själva, kan sedan biolological processer producerar målts med plana ytor och ojämna konturer (t.ex.., rosenblad).
Figurerna 5 och 6 illustrerar de typiska resultaten av två metoder som kan användas i tillägg till eller i stället för, VP för att skapa principiella variationer i föremål form och kategorier objekt.
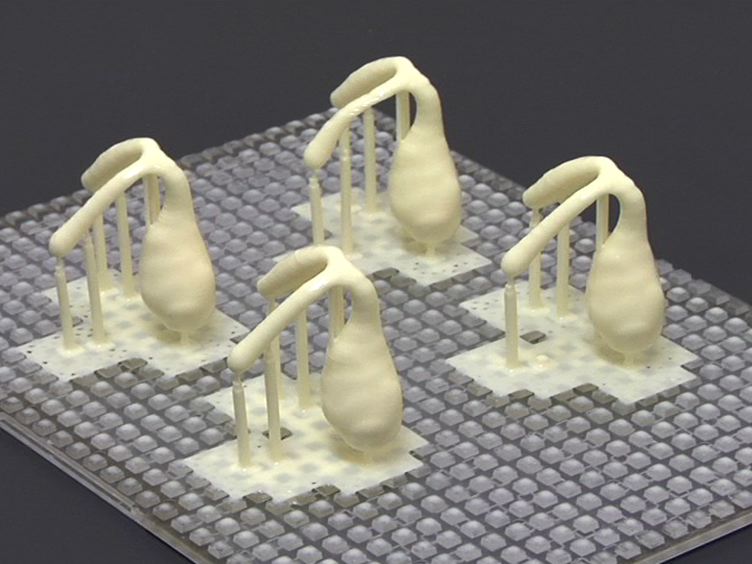
Den övre panelen i figur 7 illustrerar visuella återgivningar av två digitala embryon, och den nedre panelen i figur 7 illustrerar motsvarande utskrifter som genereras av en kommersiellt tillgänglig 3-D-Prototyper.
Figurerna 8 och 9 visar de förfaranden som beskrivs i avsnitt 6 för att använda bild-fragment att kategorisera en viss visuellt objekt.

Figur 1. Virtuellt morfogenes. 14. Digitala embryon kan genereras genom att simulera en eller flera av några av de viktigaste processerna för biologisk embryogenes: morfogen-medierad celldelning, celltillväxt, cellrörelse och programmerad celldöd 7,8,36,37. Varje körning startar med en ikosaeder (visad i den övre panelen), och genererar en unik embryo, beroende på de VM parameterinställningar (eller "genotyp") av detta embryo. Sålunda, de 16 embryona i bottenpanelen ha olika former, eftersom de alla har olika genotyper. Observera att enklare eller mer komplexa former kan genereras som behövs (t.ex. för att optimalt stimulera nervceller vid en given nivå av visuell hierarki) genom att manipulera genotyp av embryot. Alla de ovannämnda embryogenetic processer utom programmerad celldöd simulerades att generera embryona visas. Simulerad programmerad celldöd är särskiltanvändbart för att skapa riktade fördjupningar (ej visad).

Figur 2. Skapa visuella stimuli med hjälp av digitala embryon. Liksom alla virtuella 3-D objekt, kan digitala embryon grafiskt manipuleras för att skapa visuella scener godtycklig komplexitet med alla vanliga 3-D grafiska verktyg. Denna figur illustrerar några vanliga manipulationer. (A) Samma digitala embryot är strukturerad med många olika texturer och tände på ett osynligt ljuskälla längst upp till vänster. (B) En kamouflerad scen skapas genom att ändra storlek och att omorientera den digitala embryot och digitalt placera den mot samma bakgrund var det texturerade med. Den digitala embryot kan hittas i "synliga" i det nedre högra kvadranten. För ytterligare exempel på visuella stimuli skaparpade med digitala embryon, se refs. 9,10,12-14,38.

Figur 3. Skapa digitala embryo kategorier med VP. VP Algoritmen simulerar biologisk evolution, genom att i båda fallen, nya objekt och kategorier objekt framstår som ärftliga variationer ackumuleras selektivt. Vid varje generation G i, utvalda embryon fortplanta, vilket leder till generation G i +1. Avkomman ärver form hos sina föräldrar, men samla form varianter av sina egna (som bestäms av små variationer i deras genotyp) som de utvecklas. Denna figur visar en "släktträd" av tre generationer av ättlingar början från en enda gemensam förfader, en ikosaeder. Notera att i detta fall, formen komplexiteten ökar från ikosaeder till Generatjon G 1, men inte från G 1 framåt. Detta beror på att ökning i cellantal (dvs.., Celldelning) tilläts från ikosaedern till generation G 1, men inte från G 1 framåt. I allmänhet, tenderar celldelning att öka komplexiteten form, medan andra morfogenetiska processer såsom cellrörelse och celltillväxt ändrar form utan att ändra den totala komplexiteten av formen.

Figur 4. VP med virtuella föremål än digitala embryon. Siffran hjälper illustrera den allmänna principen att virtuella objekt andra än digitala embryon kan användas som indata till VP. VP-algoritmen i sin nuvarande form kan fungera på alla virtuella 3-D objekt vars yta enbart består av trianglar. Generation G 1 comprised av (från vänster till höger) en kalebass, diamant, ansiktsmask, äpple, rock och kaktus. Observera att föremålen i produktion G 1 i denna figur inte har en gemensam förfader, eftersom VP inte kräver det. Objekt i G 2 och G 3 representerar ättlingar berget i G 1. Inga celldelningar tilläts i någon generation, så att alla form variationer uppstod enbart från rörelsen och / eller tillväxten av de enskilda "cellerna" i givet objekt.

Figur 5. Använda morphing att skapa mjuka variationer i formen. Morphing innebär att man tar två givna objekt (längst till vänster och längst till höger embryo i denna figur) och beräkna de mellanliggande objekt (mellanliggande embryon) genom att interpolera mellan motsvarande hörn i två nomineraded objekt. I det visade fallet, var alla hörn interpoleras med användning av samma skalära faktorn, resulterar i en linjär morphing. Det är emellertid också möjligt att morfa föremålen icke-linjärt (ej visad). Morphing är beräkningsmässigt enkel när det finns en exakt ett-till-ett-förhållande mellan spetsarna hos två objekt, som i det visade fallet. Det är dock möjligt i princip morph mellan två givna virtuella föremål oavsett om deras hörn motsvarar exakt, men det finns ingen unik principiell metod för detta 17,18.

Figur 6. Använda huvudsakliga komponenter för att skapa mjuka variationer i formen. (A) Genomsnittlig embryo. Detta embryo är det aritmetiska medelvärdet av 400 embryon (200 vardera från kategori K och L iFigur 3). Huvudkomponenter beräknades såsom beskrivits i steg 4,3. Observera att huvudkomponenter representerar oberoende av varandra, abstrakta form dimensioner 400 embryon (visas ej) 25,26. 400 embryon ger 399 noll huvudkomponenter 25,26, som tillsammans står för hela variansen, eller formen, tillgänglig kollektivt i embryona. Av konvention huvudkomponenter arrangerade i fallande ordning sina egenvärden, eller hur stor andel av den totala variansen de förklarar 25,26. I det här fallet stod de första två huvudkomponenterna för respektive 73% och 19% av den form uppgifterna i de 400 embryon. (B) Embryon som representerar olika vikter (eller mer exakt, viktade egenvärden) av Principal Component 1. Vikterna varierade från +2 (längst till vänster) till -2 (längst till höger) i lika steg -0,2. (C) Embryon som representerar olika vikter av kapitalbeloppet component 2. Vikterna varierade också från +2 (längst till vänster) till -2 (längst till höger) i lika steg -0,2. Observera att manipulera huvudkomponenter inte uteslutande inte manipulera en given specifik kroppsdel av embryot (t.ex.., Vingar embryot i det fall som visas). Men, om så är nödvändigt, kroppsdelar av virtuella 3-D kan föremålen manipuleras på något godtycklig användardefinierad sätt använder de flesta av de kommersiellt tillgängliga 3-D modellering miljöer (inte visad).

Figur 7. Skapa haptiska objekt. Virtuella 3-D objekt kan "skrivas" som haptiska objekt med en standard, kommersiellt tillgänglig 3-D "skrivare" eller Prototyper. Denna figur visar digitala embryon utförda som visuella objekt (övre raden) eller som motsvarande haptiska objekt (nedersta raden). De haptiska objekt shown i denna figur trycktes till ca 6 cm bred (skala bar = 1 cm), även om föremålen kan skrivas på mycket mindre eller större storlekar.

Figur 8. En mall för ett exempel informativ fragment. I det här exemplet har mallen en tröskel på 0,69 associerade med den.

Figur 9. En ny bild för vilken objektet kategorin inte är känd och behöver bestämmas.
Discussion
Nyttan av VM och VP i kognitionsvetenskap Research
Vi har tidigare beskrivit nyttan av VM och VP i detalj L9 ,10,12-14. Kortfattat är VM, speciellt den digitala embryot metoden användbar eftersom den ger en principfast och flexibel metod för att skapa nya, men naturalistiska 3-D objekt 14. Likaså ger VP en principiell metod för att skapa naturalistiska kategorierna 9,10,12,13. Det är värt att notera att objekt kategorier som genereras av VP delar många egenskaper med objekt kategorier i naturen, bland annat det faktum att kategorierna tenderar att vara hierarkisk i naturen, och har variationer inom och mellan kategorierna uppstår oberoende av försöksledaren och algoritmer för klassificering dem 39.
Nuvarande begränsningar och framtida inriktningar
Tre nuvarande begränsningar i vår protokoll och riktlinjer för framtida arbete de föreslårär särskilt anmärkningsvärt: För det första både VM och VP simulera biologiska processer. Även om vi visar att icke-biologiska virtuella objekt kan användas som substrat för dessa processer, de underliggande processerna är fortfarande biologiskt motiverat. Men naturföremål - biologiska och icke-biologiska både - genomgår formförändringar på grund av icke-biologiska krafter. Till exempel, kan stenar ändrar form till följd av geologiska processer såsom erosion eller sedimentering. Nya kategorier av sten kan uppstå från andra sådana geologiska processer. Det bör vara relativt enkelt att införliva dessa processer i repertoaren av tillgängliga algoritmer formförändring.
Den andra stor begränsning av vår protokoll är att dess nuvarande repertoar av dynamiska formförändringar är ganska begränsat. Det är önskvärt att en större mängd formförändringar såsom biologisk rörelse eller rörelse på grund av yttre krafter såsom vind, vatten eller gravitation. Vi förväntar oss att det will vara relativt enkelt att få bära de kända algoritmer datoranimationer att genomföra sådana dynamiska formförändringar.
Den tredje största begränsningen av vår protokollet är att VM för närvarande inte innehåller många andra kända morfogenetiska processer inklusive, framför allt, gastrulation 36. Det misslyckas också att införliva vissa kända begränsningar, såsom det faktum att morfogenes i växter medieras helt av tillväxt, med liten eller ingen cellförflyttning möjlig, på grund av cellväggarna 36. Likaså innehåller VP inte andra kända fylogenetiska processer såsom genetisk drift 40. Itu med dessa begränsningar skulle hjälpa avsevärt underlätta användningen av vår protokollet i utvecklings, ekologiska och evolutionära simuleringar.
Disclosures
Inga intressekonflikter deklareras.
Acknowledgments
Detta arbete stöddes delvis av US Army Research Laboratory och US Army Research Office bidrag W911NF1110105 och NSF bevilja IOS-1147097to Jay Hegde. Stöd gavs också av en pilot bidrag till Jay Hegde från Vision Discovery Institute of Georgia Health Sciences University. Daniel Kersten har finansierats med bidrag ONR N00014-05-1-0124 och NIH R01 EY015261 dels av WCU (World Class universitet) som finansieras av ministeriet för utbildning, vetenskap och teknik genom National Research Foundation of Korea (R31-10.008 ). Karin Hauffen stöddes av Grundutbildning Research lärlingsprogram (URAP) i den amerikanska armén.
Materials
| Name | Company | Catalog Number | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. | |||
References
- Palmeri, T. J., Gauthier, I. Visual object understanding. Nat. Rev. Neurosci. 5, 291-303 (2004).
- Seger, C. A., Miller, E. K. Category learning in the brain. Annu. Rev. Neurosci. 33, 203-219 (2010).
- Perceptual Learning. Fahle, M., Poggio, T. , MIT Press. (2002).
- Ashby, F. G., Maddox, W. T. Human category learning. Annu. Rev. Psychol. 56, 149-178 (2005).
- Gauthier, I., Tarr, M. J. Becoming a "Greeble" expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Fragment-based learning of visual categories. Bart, E., Hegdé, J., Kersten, D. Cosyne 2008 Conference, 2008 Feb 28-Mar 2, Salt Lake City, , Cosyne. Salt Lake City. 121-12 (2008).
- Ball, P. Nature's patterns : a tapestry in three parts. , Oxford University Press. (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D. Bootstrapped learning of novel objects. J. Vis. 3, 413-422 (2003).
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M. Feature-based volume metamorphosis. SIGGRAPH. , 449-456 (1995).
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. Numerical geometry of non-rigid shapes. , Springer. (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. Pattern classification. , 2nd edn, Wiley. (2001).
- Bishop, C. M. Pattern recognition and machine learning. , Springer. (2006).
- Theodoridis, S., Koutroumbas, K. Pattern recognition. , 3rd edn, Academic Press. (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , 4th edn, W.H. Freeman and Co. (2011).
- Tuffery, S. Data mining and statistics for decision making. , Wiley. (2011).
- Crawley, M. J. Statistical Computing: An Introduction to Data Analysis using S-Plus. , Wiley. (2002).
- Venables, W. N., Ripley, B. D. Modern Applied Statistics with S. , Springer. (2003).
- Beier, T., Neely, S. Feature-based image metamorphosis. SIGGRAPH. 26, 35-42 (1992).
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. Warping and morphing of graphical objects. , Morgan Kaufmann Publishers. (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , IEEE Computer Society Press. (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. Computer graphics. , Nova Science Publishers. (2011).
- Lengyel, E. Mathematics for 3D game programming and computer graphics, third edition. , 3rd Ed, Cengage Learning. (2011).
- Gilbert, S. F. Developmental biology. , 9th edn, Sinauer Associates. (2010).
- Gilbert, S. F., Epel, D. Ecological developmental biology : integrating epigenetics, medicine, and evolution. , Sinauer Associates. (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E. Categorization of natural objects. Annual Review of Psychology. 32, 89-115 (1981).
- Futuyma, D. J. Evolution. , 2nd edn, Sinauer Associates. (2009).