Summary
Vi beskriver en roman metodikk for å skape naturalistiske 3D-objekter og objekt kategorier med presist definerte funksjonen variasjoner. Vi bruker simuleringer av de biologiske prosessene i morphogenesis og Phylogenesis å skape nye, naturalistiske virtuelle 3D-objekter og objekt kategorier som deretter kan ytes som visuelle bilder eller haptisk objekter.
Abstract
For å kvantitativt studere objektet persepsjon, det være seg oppfatning av biologiske systemer eller maskiner, må man lage objekter og objekt kategorier med nettopp definerbare, fortrinnsvis naturalistisk, egenskaper en. Videre, for studier av perseptuell læring, er det nyttig å lage nye objekter og objekt kategorier (eller objektklasser) med slike egenskaper 2.
Mange innovative og nyttige metoder for tiden eksisterer for å skape nye objekter og objekt kategorier 3-6 (se også refs. 7,8). Men generelt sett, de eksisterende metodene har tre store typer mangler.
Først er formvariasjoner generelt pålagt av eksperimentator 5,9,10, og kan derfor være forskjellig fra variasjonen i naturlige kategorier, og er optimalisert for en bestemt anerkjennelse algoritme. Det ville være ønskelig å ha variasjoner oppstår uavhengig av externally pålagt begrensninger.
Sekund, eksisterende metoder har problemer fange formen kompleksiteten av naturlige objekter 11-13. Hvis målet er å studere naturlig objekt oppfatning er det ønskelig for objekter og objekt kategorier som skal naturalistiske, for å unngå mulige forundrer og spesielle saker.
For det tredje er det generelt vanskelig å kvantitativt måle tilgjengelig informasjon i de stimuli som er opprettet av konvensjonelle metoder. Det ville være ønskelig å opprette objekter og objekt kategorier hvor den tilgjengelige informasjonen kan måles nøyaktig, og om nødvendig, systematisk manipulert (eller tonet). Dette gjør det mulig å formulere de underliggende objekt anerkjennelse oppgaver i kvantitative termer.
Her beskriver vi et sett av algoritmer, eller metoder, som oppfyller alle de tre kriteriene ovenfor. Virtual morphogenesis (VM) skaper nye, naturalistiske virtuelle 3D-objekter som kalles "digitale embryoer" vedsimulere den biologiske prosessen embryogenese 14. Virtual Phylogenesis (VP) skaper nye, naturalistiske objekt kategorier ved å simulere den evolusjonære prosessen med naturlig utvalg 9,12,13. Objekter og objekt kategorier skapt av disse simuleringene kan bli ytterligere manipulert av ulike morphing metoder for å generere systematiske variasjoner av form egenskaper 15,16. VP og morphing metoder kan også brukes i prinsippet til nye virtuelle objekter enn digitale embryo, eller til virtuelle versjoner av virkelige objekter 9,13. Virtuelle objekter som er opprettet på denne måten kan bli gjengitt som visuelle bilder ved hjelp av en konvensjonell grafisk verktøykasse, med ønskede manipulasjoner av overflatestruktur, belysning, størrelse, utsiktspunkt og bakgrunn. De virtuelle objekter kan også være "trykket" som haptisk objekter ved hjelp av en konvensjonell 3-D prototyper.
Vi beskriver også noen implementeringer av disse beregningsorientert algoritmer for å hjelpe illustrerertrere den potensielle nytten av algoritmer. Det er viktig å skille algoritmene fra sine implementeringer. Implementeringer er demonstrasjoner tilbys utelukkende som en 'bevis på prinsippet "av de underliggende algoritmene. Det er viktig å merke seg at, generelt, en implementering av en beregningsmessig algoritme ofte har begrensninger at algoritmen i seg selv ikke har.
Sammen disse metodene representerer et sett med kraftige og fleksible verktøy for å studere objektet anerkjennelse og perseptuelle læring ved biologiske og beregningsorientert systemer likt. Med passende utvidelser, kan disse metodene også være nyttig i studiet av morphogenesis og Phylogenesis.
Protocol
1. Opprette Naturalistiske virtuell 3-D objekter ved hjelp VM
- Å lage digitale embryoer, bruker Digital Embryo Workshop (DEW, se tabell 1). Hver kjøring genererer en enkelt embryo 14, form som er unik for et gitt sett av innstillinger (eller 'genotype') benyttet til gitt sikt (figur 1). De "celler" av embryo er representert som trekanter 14.
- Kjør programmet så mange ganger som nødvendig for å generere det ønskede antall embryoer.
- Hvis mer komplekse former er ønsket, øke antall vekst sykluser, dvs. antall ganger cellene av embryoet vil dele. Vær oppmerksom på at dette også vil avta programmet. Hvis det er nødvendig å opprette virtuelle objekter enn digitale embryoer, bruk kommersielt tilgjengelige 3D-modelleringsverktøy eller skaffe virtuelle objekter fra kommersielle leverandører (tabell 1).
- Det er generelt tilrådelig å lagre den virtuelle objektets i et vanlig filformat som OBJ, slik at gjenstandene lett kan innføres til en kommersiell 3-D modellering verktøykasse. For dette formål, skriver DEW objekter i OBJ-format som standard.
- Visuelle stimuli kan genereres ved hjelp av en eller flere digitale embryoer ved hjelp av en 3-D-modellering og gjengivelse miljø (tabell 1). Bruk standard grafiske operasjoner som varierende retningen, størrelsen, belysning, overflatestruktur og bakgrunn for å skape de ønskede stimuli (se Figur 2).
2. Opprette Naturalistiske Object kategorier med VP
- For å generere objekt kategorier, generere etterkommere (eller 'barn') av den gitte stamfar (eller 'overordnet') objekt ved hjelp av en ønsket kombinasjon av prosessene i trinn 1.1 ovenfor (figur 3) 9,10,12,13.
- Noen metoder beskrevet nedenfor for å lage glatte formvariasjoner som morphing eller hovedkomponentene (se trinn 3 og 4 nedenfor), arbeid bettER hvis alle inngangs objektene har samme antall celler, og hvis det er en-til-en korrespondanse mellom hjørnene av objektene. For å skape slike objekter, bruker bare de VM prosesser som ikke vil endre antall celler og vil bevare en-til-en korrespondanse av hjørnene blant objektene (se f.eks generasjoner G 2 til G 3 i figur 3). For eksempel, celledeling og programmert celledød endre antall celler, og gjøre det mye vanskeligere (men ikke umulig 17,18) for å bestemme en-til-en korrespondanse mellom hjørnene i en gitt par av objekter.
Merk at de prosesser som endrer antall celler i et gitt objekt også endre sin form kompleksitet. Generelt, desto større antall celler, jo større formen kompleksitet på objektet og glattere overflaten. - Om nødvendig, virtuelle andre objekter enn digitale embryoer kan brukes som input til VP (figur 4).
- Noen metoder beskrevet nedenfor for å lage glatte formvariasjoner som morphing eller hovedkomponentene (se trinn 3 og 4 nedenfor), arbeid bettER hvis alle inngangs objektene har samme antall celler, og hvis det er en-til-en korrespondanse mellom hjørnene av objektene. For å skape slike objekter, bruker bare de VM prosesser som ikke vil endre antall celler og vil bevare en-til-en korrespondanse av hjørnene blant objektene (se f.eks generasjoner G 2 til G 3 i figur 3). For eksempel, celledeling og programmert celledød endre antall celler, og gjøre det mye vanskeligere (men ikke umulig 17,18) for å bestemme en-til-en korrespondanse mellom hjørnene i en gitt par av objekter.
- Objektene innenfor en gitt kategori kan videre velges slik at det oppnås en gitt fordeling av funksjoner 19. For eksempel, kan en selektivt eliminere mellomstore objekter fra en gitt kategori for å generere en bimodal fordeling av objektet størrelse.
- Det er ingen enkelt metode som er universelt optimal for å måle tilgjengelige formen for alle kategorier, og det er heller en enkelt metode som er optimal for å kategorisere alle objekter 20-22. Dermed må experimentor velge disse metodene basert på kategorier og beregningsorientert mål på hånden 20-22. Trinn 4 beskriver en vanlig metode for å manipulere forskjellige aspekter av tilgjengelige form informasjon.
- Likheten mellom en gitt par kategorier objektivt kan måles ved hjelp av tilgjengelige fylogenetiske metoder 23,24. For eksempel, den vertikale (eller 'evolusjonær') avstand mellom et gitt par av kategorier, målt ved hierarkisk clustering metoder i R statistisk verktøykasse, er et objektivt mål på kategori likhet 25,26.
3. Flere metoder for å lage form Variasjon: Digital Morphing
- Gitt noen par av objekter slik at hver toppunkt ett objekt tilsvarer nøyaktig én toppunktet på andre objektet (. Dvs. objekter med en-til-en-forhold mellom hjørner), er morphing grei 17,18,27-29: I dette tilfelle, er glatte variasjoner (eller 'morphs') mellom de to objektene produsert av glatt interpolere mellom de tilsvarende hjørner og normaler (figur 5). Avhengig av par av objekter valgt, vil morphing resultere i nye kategorier eller flere barn i en kategori.
- Objektene som vises i figur 5 ble opprettet ved hjelp av lineær morphing 27-29. Objektene kan morphed (eller vridd) med et stort utvalg av andre tilgjengelige deformasjon teknikker 17,18.
- Å skape en ønsket fordeling av morphed former, velger interpolering poeng tilsvarende.
4. Flere metoder for å lage form Variasjon: hovedkomponenter
- For å kunne bruke viktigste komponenter for å generere formvariasjoner, må man først finne de viktigste komponentene 15. Hovedkomponentene er spesifikke for den gitte sett av objekter som brukes for å bestemme dem 26. For gode resultater, bruk minst 30 objekter med en-til-en-forhold mellom hjørnene 26.
- Generere en gjennomsnittlig objekt fra en ønsket mengde med n innganger objekter, ved separat gjennomsnitt koordinatene og normal av hvert toppunkt for alle objekter. Således, x koordinere av en gitt toppunkt k av bør være gjennomsnittet av x koordinatene av toppunktet k av alle n objekter, og så videre.
- Bruk Matlab-funksjonen princompå bestemme viktigste komponentene av N objekter. Dette vil generere n-1 ikke-null egenvektorer, sammen med det tilsvarende N-1 egenverdiene 26.
- Å generere et nytt objekt A j fra en gitt rektor komponent P i, multiplisere p Jeg ved tilsvarende egenverdi λ jeg og en ønsket vekt w j og legge til den gjennomsnittlige objektet:
A j = + w j λ i P i - Hver unike w j vil generere et unikt objekt. Ved jevnt varierende w, kan man lage glatte formvariasjoner langs en gitt rektor komponent.
- Å skape formvariasjoner langs en uavhengig form dimensjon, gjenta trinn 4,4 med en annen hovedkomponent.
- Å skape en ønsket fordeling av figurene langs en gitt rektor komponent, bruk ønsket fordeling av w. </ Li>
- Å skape et multi-dimensjonal rutenett av figurer, bruke et sett med vekter for hver av flere hovedkomponenter:

5. Opprette haptisk Versjoner av 3D-objekter
- 'Print-out' 3D-objekter ved hjelp av en 3-D prototyper (eller 3-D 'skriver'). Hvis det er nødvendig, kan du justere størrelsen på objektet og glatt objektets overflate før utskrift.
6. Et eksemplar Bruksområde: Bayesian Inference av Image Kategori
- En viktig oppgave i visuell prosessering er inferring hvilken kategori en gitt observert objekt tilhører. Selv om den eksakte mekanismen for denne slutning er ukjent, er det både beregningsorientert og fysiologiske bevis 9,12,13,30-32 at det innebærer å bruke informasjon om kjente funksjoner av objektet i den gitte bildet for å antyde kategorien av objektet. Her vil vi ILLUSTRASJONte hvordan dette slutningsstatistisk prosessen kan fungere i en bayesiansk rammeverk, og hvordan digitale embryoer kan være nyttig for forskning på dette området.
- For enkelhets skyld vil vi anta at kategoriseringen oppgave er binær og innebærer skille kategori K fra kategori L (figur 3). La C være kategorien variabel. Vi vil antyde at C = K eller C = L i henhold til om den observerte bildet jeg tilhører kategori K eller L. En typisk tilnærming til kategorisering innebærer:
- Beregne sannsynligheten for at kategorien er K gitt informasjonen i bildet, betegnet p (C = K | I);
- Beregne sannsynligheten at kategorien er L gitt informasjonen i bildet, betegnet p (C = L | I), og
- Plukke kategorien med høyere sannsynlighet.
- Deretter vil vi anta for enkelhetat det er nøyaktig en binær funksjon F. Denne funksjonen kan være enten tilstede i bildet (betegnet F = 1) eller fraværende fra bildet (betegnet F = 0). Dette eksempelet vil bruke 'informativ fragment "-funksjon vist i Figur 8. Informative fragmenter ble først beskrevet av Ullman og kolleger 33. I den foreliggende sak, vil vi bruke bildet malen vist i figur 8 som funksjon, og en terskelverdi på 0,69. For å avgjøre om denne funksjonen er til stede i et gitt bilde (si, lengst til høyre bilde i rad G3 i Figur 3), vil vi bruke følgende fremgangsmåte:
- Skyv denne malen over alle mulige steder i bildet og beregne, på hvert sted, den absolutte verdi av normalisert kryss-korrelasjon mellom malen og det underliggende delbilde.
- Velg bildet plassering med den høyeste verdien (0,60 i denne saken).
- Dersom denne verdien er over terskelen, konkludereat funksjonen er tilstede, ellers, konkluderer med at det er fraværende. I vårt tilfelle, siden den høyeste korrelasjon 0,60 er under grensen på 0,69, konkluderer vi at funksjonen er fraværende i dette bildet.
- Begrunnelsen for å bruke slike funksjoner, og mekanismene for å velge funksjoner og bestemme sine terskler er utenfor rammen av denne rapporten, men er beskrevet i detalj i refs. 33, 30.
- Innenfor rammen av funksjonen-baserte slutning, antar vi at all informasjon observatør utdrag fra bildet finnes i verdien av denne funksjonen, jeg. e, at p (C | I). = p (C | F).
Derfor blir den oppgave som for å bestemme verdien av F i gitt bilde (til stede eller fraværende), databehandling p (C = K | F) og p (C = L | F) for at verdien F, og å velge en kategori med høyere probabiheten. - I bayesiansk rammeverk,

Derfor,
og

Merk at nevneren i de to ligningene er det samme. Derfor, for å sammenligne p (C = K | F) og p (C = L | F), er det ikke nødvendig å beregne nevneren, snarere er det tilstrekkelig å beregne mengdenep (C = K | F) α p (C = K) p (F | C = K)
og
p (C = L | F) α p (C = L) p (F | C = L)
These kalles 'unormalisert sannsynligheter'. Begrepet p (C) kalles 'foregående', og begrepet p (F | C) kalles "sannsynligheten '.- For enkelhets skyld vil vi anta en "flat" før: p (C = K) = p (C = L) = 0,5.
- Oppgaven er nå å beregne p (F | C), er sannsynligheten for en gitt funksjon verdi i et bilde av en gitt kategori C.
- Vi vil bruke de seks bilder i kategori L (figur 3) som et eksempel for å beregne p (F = 1 | C = L), sannsynligheten for at funksjonen er til stede i et bilde av kategori L.
- Å beregne p (F = 1 | C = L), først ta alle treningsbilder som tilhører L. Igjen, er disse vist på fig 3.
- For hvert bilde, avgjøre om funksjonen er 1 (til stede) Eller 0 (fraværende), som beskrevet i (6.3.1) - (6.3.3). I vårt tilfelle, for de seks bilder i figur 3, verdiene er: [0, 0, 1, 0, 1, 0].
- Beregn fraksjon av bilder hvor funksjonen verdien er 1.. I vårt tilfelle, er det 2/6 = 0,33.
- Derfor, p (F = 1 | C = L) = 0,33. Merk at for å få nøyaktige anslag, bør man bruke minst 30 bilder per klasse.
- På lignende måte, kan vi beregne at p (f = 0 | C = L) = 0,67, p (F = 1 | C = K) = 0,83, p (f = 0 | C = K) = 0,17.
- Gitt disse verdiene, kan inferens utføres. Anta at vi får et nytt bilde (figur 9), og oppgaven er å bestemme sin kategori etiketten. Dette blir utført som følger:
- Vi bestemmer om funksjonen F er tilstede i bildet, som er beskrevet i (6.3.1) - (6.3.3). I vårt tilfelle, feaperaturen er tilstede, så F = 1.
- Bruke likningene (1) og (2), og verdiene beregnet i (6.7.5) - (6.7.6), kan vi beregne at p (C = K | F = 1) = 0,42 og p (C = L | F = 1) = 0,17.
- Gitt denne informasjonen, er det rasjonelt å konkludere med at bildet er fra kategorien K, med relativt lav selvtillit.
- Det kan være interessant og nyttig å teste en slik tilnærming i et biologisk system (si, psychophysically). I dette tilfellet, kan atferdsmessige forutsigelser gjøres og sammenlignet mot beregningsorientert resultater som de som ble oppnådd i (6.8.2). For å gjøre nøyaktige anslag, gode estimater av p (F | C) er nødvendig. Slike estimater kan imidlertid være vanskelig å få tak i for kjente objekter. Årsaken er at en gjenstand anslag av p (F | C) ikke er observerbar direkte, og det er svært vanskelig å beregne den siden emnet'S tidligere eksponering for naturlige bilder er ukontrollerbare og ukjente. I motsetning, hvis digitale embryoer blir brukt for eksperimentene, så er det mulig å nøyaktig kontrollere hvilke embryoer og embryo kategorier emnet er utsatt for. Dette gjør det enkelt å beregne hvor store mengder av interesse fra nøyaktig de samme dataene faget ble utsatt for. Det faktum at embryoer 'utseende er naturalistiske er nyttig, siden det gjør det sannsynlig at motivet er å bruke samme kategorisering strategi som med naturlige kategorier.




Representative Results
VM kan brukes til å generere et nesten ubegrenset tilførsel av nye 3-D figurer. Noen exemplar digitale embryoer generert ved hjelp av VM algoritmen er vist i den nederste panelet i figur 1. Hver av disse 16 embryoer ble generert ved hjelp av "growEmbryos.exe 'program i Digital embryo verktøy for Cygwin (se tabell 1) for 40 vekst sykluser. Alle andre vekstparametre ble satt internt av programmet. De fleste av disse parametrene var konstant (dvs. like fra embryo til den neste). Noen parametre slik som plassering og styrke morphogen kilder, var tilfeldig parametere velges internt programmet uavhengig for hver kjøring. De formvariasjoner blant disse 16 embryoer oppsto utelukkende som følge av variasjonene i disse tilfeldige parametrene.
Noen eksempler på overflate teksturering 34,35 bruke noen vilkårlig valgt teksturer er vist i figur 2A. Visuelle scener av enrbitrary kompleksitet kan opprettes ved hjelp av en kommersielt tilgjengelig 3-D modellering og gjengivelse miljø, som vist på figur 2B.
En representant 'slektstre' genereres av VP ved hjelp av digitale embryoer er vist i figur 3.. Sammenlignbare trær kan også konstrueres ved hjelp av andre objekter enn digitale embryoer, som vist i figur 4. Merke til at i begge tilfeller, de objekter som har en felles stamfar straightforwardly utgjør en kategori, selv experimenter kan også velge å definere en kategori som enhver annen sett av objekter. Det er verdt å merke seg fra Figur 4 at vår nåværende implementeringen av VM og VP algoritmer tendens til å produsere relativt jevne, buede overflater, i motsetning til hakkete eller flat objekter. Det er også verdt å merke seg at dette er antagelig begrensning av vår gjennomføring av disse algoritmene og ikke de algoritmer selv, kan siden biolological prosesser produsere målsetts med flate overflater og rufsete konturer (f.eks., rose blad).
Fig. 5 og 6 illustrerer de typiske resultater av to metoder som kan brukes i tillegg til, eller i stedet for, VP for oppretting prinsippfaste variasjoner i objekt form og objekt kategorier.
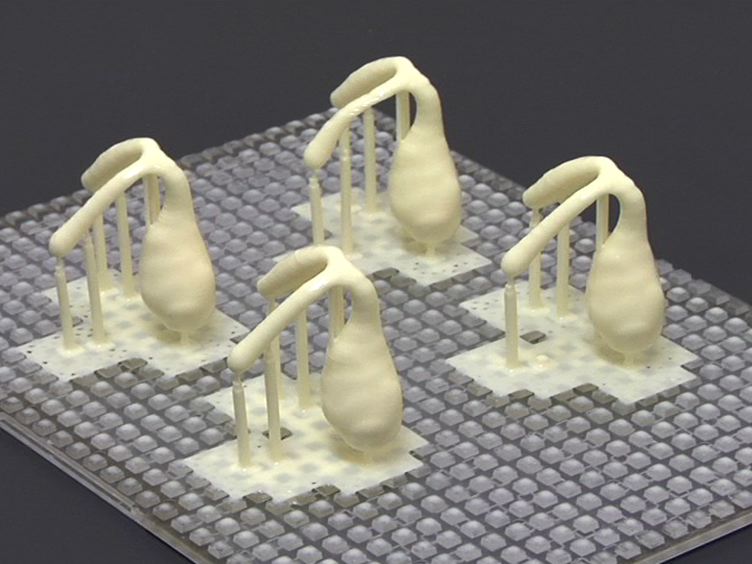
Toppanelet av Figur 7 illustrerer visuelle gjengivelser av to digitale embryoer, og bunnpanelet av Figur 7 illustrerer de tilsvarende utskrifter generert av en kommersielt tilgjengelig tre-D prototyper.
Figur 8 og 9 illustrerer prosedyrene beskrevet i avsnitt 6 for å bruke bilde fragmenter å kategorisere en gitt visuell objekt.

Figur 1. Virtual morphogenesis. 14. Digitale embryoer kan genereres ved å simulere en eller flere av noen av de viktigste prosesser av biologisk embryogenese: morphogen-mediert celledeling, cellevekst, celle bevegelse og programmert celledød 7,8,36,37. Hver kjøring starter med et ikosaeder (vist i toppanelet), og genererer en unik embryo, avhengig VM parameterinnstillingene (eller 'genotype') i nevnte embryo. Dermed blir 16 embryoene i det nedre panelet har ulike former, fordi de alle har forskjellige genotyper. Merk at enklere eller mer komplekse former kan genereres som nødvendig (f.eks, for å optimalt stimulere nevroner ved et gitt nivå av det visuelle hierarki) ved å manipulere genotypen av embryo. Alle de nevnte prosesser embryogenetic unntatt programmert celledød var simulert i generering embryoene vist. Simulert programmert celledød er spesieltnyttig for å lage målrettede inntrykninger (ikke vist).

Figur 2. Skape visuelle stimuli ved hjelp av digitale embryoer. Som enhver virtuelle 3-D objekt, kan digitale embryoer bli grafisk manipulert til å skape visuelle scener av vilkårlig kompleksitet ved hjelp av noen standard 3-D grafisk verktøykasse. Denne figuren illustrerer noen vanlige manipulasjoner. (A) Det samme digitale embryo er strukturert ved hjelp av mange forskjellige teksturer, og tente fra en usynlig lyskilde øverst til venstre. (B) En kamuflert scene er laget ved å endre størrelsen og re-orientere den digitale embryo og digitalt plassere den mot samme bakgrunn var det strukturert med. Den digitale embryo kan bli funnet i "vanlig visning 'i den nedre høyre kvadrant. For flere eksempler på visuelle stimuli crererte ved hjelp av digitale embryoer, se refs. 9,10,12-14,38.

Figur 3. Lage digitale embryo kategoriene ved hjelp VP. VP algoritmen emulerer biologisk evolusjon, ved at det i begge tilfeller, nye gjenstander og objekt kategorier fremstå som arvelige variasjoner akkumuleres selektivt. På hver generasjon G i, valgte embryoer formere, som fører til generasjon G i +1. Avkommet arver form egenskapene fra foreldre, men opparbeider formvariasjoner av sine egne (som bestemmes av små variasjoner i genotype deres) som de utvikler. Denne figuren viser en "familietre" av tre generasjoner av etterkommere med start fra en felles stamfar, en ikosaeder. Merk at, i dette tilfellet, formen kompleksiteten øker fra ikosaeder til generation G 1, men ikke fra en G framover. Dette er fordi økningen i celleantall (dvs.., Celledeling) ble tillatt fra ikosaeder til generasjon G 1, men ikke fra G 1 fremover. Generelt en tendens til å øke celledeling form kompleksitet, mens andre morfogenetisk prosesser som cellebevegelse og cellevekst endre form uten å endre den generelle kompleksitet figuren.

Figur 4. VP bruke virtuelle andre objekter enn digitale embryoer. Denne figuren illustrerer det generelle prinsipp at virtuelle andre objekter enn digitale embryoer kan brukes som input til VP. VP algoritme i sin nåværende form kan operere på alle virtuelle 3-D objekt hvis overflate består utelukkende av trekanter. Generasjon G 1 comprised av (fra venstre til høyre) en gourd, diamant, ansiktsmaske, eple, rock og kaktus. Merk at objektene i generasjon G 1 i denne figuren ikke har en felles stamfar, fordi VP ikke krever det. Objekter i G 2 og G 3 representerer etterkommere av rock i G 1. Ingen celledelinger ble tillatt i noen generasjon, slik at alle formvariasjoner oppsto utelukkende fra bevegelsen og / eller vekst av de enkelte "celler" av gitt objekt.

Figur 5. Bruke morphing å lage jevne variasjoner i form. Morphing innebærer å ta to gitte objekter (helt til venstre og lengst til høyre embryo i denne figuren), og beregning av mellomliggende objekter (mellomliggende embryoer) ved å interpolere mellom de tilsvarende topp-punktene av de to utpeked objekter. I tilfellet vist, ble alle toppunktene interpolert ved hjelp av samme skalar faktor, noe som resulterer i en lineær morphing. Det er imidlertid også mulig å morph objektene ikke-lineært (ikke vist). Morphing er beregningsmessig grei når det er en nøyaktig en-til-en korrespondanse mellom hjørnene av to objekter, som i tilfellet vist. Men det er mulig, i prinsippet, å morfe mellom to gitte virtuelle objekter uavhengig av om deres toppunkter samsvarer nøyaktig, selv om det ikke er noen unik prinsipiell fremgangsmåte for å gjøre det 17,18.

Figur 6. Bruke viktigste komponenter for å lage jevne variasjoner i form. (A) Gjennomsnittlig embryo. Dette embryo representerer aritmetisk gjennomsnitt på 400 embryoer (200 hver fra kategorier og K L iFigur 3). Hovedkomponentene ble beregnet som beskrevet i trinn 4.3. Vær oppmerksom på at hovedkomponentene representerer gjensidig uavhengige, abstrakte form dimensjoner de 400 embryoer (ikke vist) 25,26. 400 embryoer gi 399 ikke-null viktigste komponentene 25,26, som til sammen står for all variansen, eller formen informasjon, tilgjengelig kollektivt i embryoer. Ved konvensjonen, er hovedkomponentene ordnet i avtagende rekkefølge av deres egenverdier, eller den del av den samlede variansen de forklarer 25,26. I dette tilfellet de første to hovedkomponenter henholdsvis utgjorde 73% og 19% av formen informasjon tilgjengelig i de 400 embryoer. (B) Embryoer som representerer ulike vekter (eller mer presist, veide egenverdier) av Principal Component 1. Vektene varierte fra 2 (helt til venstre) til -2 (helt til høyre) i like trinn på -0,2. (C) Embryoer som representerer ulike vekter av Principal component 2. Vektene varierte også fra +2 (helt til venstre) til -2 (helt til høyre) i like trinn på -0,2. Merk at manipulere prinsipale komponenter ikke manipulere utelukkende enhver bestemt kroppsdel av embryo (f.eks., Vingene av embryoet i tilfellet vist). Imidlertid, hvis det er nødvendig, kroppsdeler virtuell 3D-objekter kan manipuleres i vilkårlig brukerdefinert mote bruke mesteparten av de kommersielt tilgjengelige 3-D modellering miljøer (ikke vist).

Figur 7. Opprette haptisk objekter. Virtual 3D-objekter kan "trykket" som haptisk objekter ved hjelp av en standard, kommersielt tilgjengelig 3-D 'skriver' eller prototyper. Denne figuren viser digitale embryoer gjengitt som visuelle objekter (øverste rad) eller som de tilsvarende haptisk objekter (nederste rad). De haptisk objekter shown i dette tallet ble trykket for å være ca 6 cm bred (skala bar = 1 cm), selv om objektene kan skrives på mye mindre eller større størrelser.

Figur 8. En mal for et eksempel informativ fragment. I dette eksemplet, har malen en terskel på 0,69 forbundet med det.

Figur 9. Et nytt bilde hvor objektet kategorien ikke er kjent og må bestemmes.
Discussion
Nytten av VM og VP i kognitiv Science Research
Vi har tidligere beskrevet nytten av VM og VP i detalj L9 ,10,12-14. Kort fortalt er VM, spesielt digital embryo metodikk, nyttig fordi det gir en prinsipiell og fleksibel metode for å lage roman, men naturalistiske 3D-objekter 14. Tilsvarende gir VP en prinsipiell metode for å lage naturalistiske kategorier 9,10,12,13. Det er verdt å merke seg at objektet kategorier generert av VP deler mange egenskaper med objekt kategorier i naturen, inkludert det faktum at kategoriene tendens til å være hierarkisk i naturen, og de har variasjonene innenfor og på tvers av kategorier oppstår uavhengig av eksperimentator og algoritmer for klassifisering dem 39.
Gjeldende Begrensninger og fremtidige retninger
Tre dagens begrensninger av vår protokollen og retninger for fremtidig arbeid de foreslårkan spesielt nevne: Først, både VM og VP simulere biologiske prosesser. Vi viser at ikke-biologiske virtuelle objektene kan brukes som substrater for disse prosesser, de underliggende prosessene er fortsatt biologisk motivert. Imidlertid naturlige objekter - biologiske og ikke-biologiske likt - gjennomgå form endringer på grunn av ikke-biologiske styrker. For eksempel, kan bergarter endrer fasong grunnet geologiske prosesser som erosjon eller sedimentering. Nye kategorier av stein kan oppstå fra andre slike geologiske prosesser. Det bør være relativt enkelt å innlemme disse prosessene inn i repertoaret av tilgjengelige form for bevegelse algoritmer.
Den andre store begrensning av protokoll vår er at dagens repertoar av dynamiske formen endringer er ganske begrenset. Det er ønskelig å innlemme et større utvalg av form endringer, slik som biologisk bevegelse, eller bevegelse på grunn av ytre krefter som vind, vann eller gravitasjon. Vi forventer at det will være relativt enkelt å få til å bære de kjente dataanimasjon algoritmer for å gjennomføre slike dynamiske formen endringer.
Den tredje store begrensning av protokoll vår er at VM i dag ikke inkluderer mange andre kjente morfogenetisk prosesser, inkludert, spesielt, gastrulation 36. Det svikter også å innlemme noen kjente begrensninger, for eksempel det faktum at morphogenesis i planter er mediert helt etter vekst, med liten eller ingen celle bevegelse mulig, på grunn av celleveggene 36. Tilsvarende tar VP ikke inkludere andre kjente fylogenetiske prosesser som genetisk drift 40. Ta opp disse begrensningene ville bidra sterkt til rette for bruk av protokollen vår utviklingsmessige, økologiske og evolusjonære simuleringer.
Disclosures
Ingen interessekonflikter erklært.
Acknowledgments
Dette arbeidet ble støttet i en del av US Army Research Laboratory og US Army Research Office stipend W911NF1110105 og NSF stipend IOS-1147097to Jay Hegdé. Støtte ble også gitt av en pilot tilskudd til Jay Hegdé fra Vision Discovery Institute of Georgia Health Sciences University. Daniel Kersten ble støttet med tilskudd ONR N00014-05-1-0124 og NIH R01 EY015261 og delvis av WCU (World Class University) finansiert av departementet for utdanning, vitenskap og teknologi gjennom National Research Foundation of Korea (R31-10008 ). Karin Hauffen ble støttet av Undergraduate Forskning Lærling Program (URAP) av den amerikanske hæren.
Materials
| Name | Company | Catalog Number | Comments |
| Digital Embryo Workshop (DEW) | Mark Brady and Dan Gu | This user-friendly, menu-driven tool can be downloaded free of charge as Download 1 from http://www.hegde.us/DigitalEmbryos. Currently available only for Windows. | |
| Digital embryo tools for Cygwin | Jay Hegdé and Karin Hauffen | This is a loose collection of not-so-user-friendly programs. They are designed to be run from the command-line interface of the Cygwin Linux emulator for Windows. These programs can be downloaded as Download 2 from http://www.hegde.us/DigitalEmbryos. The Cygwin interface itself can be downloaded free of charge from www.cygwin.com. | |
| Autodesk 3ds Max, Montreal, Quebec, Canada | Autodesk Media and Entertainment | 3DS Max | This is a 3-D modeling, animation and rendering toolkit with a flexible plugin architecture and a built-in scripting language. Available for most of the current operating systems. |
| MATLAB | Mathworks Inc., Natick, MA, USA | MATLAB | This is a numerical computing environment and programming language with many useful add-on features. Available for most of the current operating systems. |
| R statistical toolkit | R Project for Statistical Computing | R | Can be downloaded free of charge from http://www.r-project.org/. Available for most of the current operating systems. |
| OpenGL | Khronos Group | OpenGL | This cross-language, cross-platform graphical toolkit can be downloaded free of charge from www.opengl.org. |
| V-Flash Personal Printer | 3D Systems Inc., Rock Hill, SC, USA | V-Flash | This is a good value for all 3-D printing applications described in this report. The print materials are also vended by 3D Systems, Inc. Less expensive models are available in open source form from RepRap (rapmanusa.com) and MakerGear. More expensive models (> $30 K) are available from Objet Geometries, 3DS Systems, Z-Corp, Dimension Printing etc. |
| TurboSquid.com | TurboSquid Inc., New York, LA | (various objects) | Various virtual 3-D objects can be downloaded from this site free of charge or for a fee. |
| Table 1. Table Of Specific Toolkits And Equipment. | |||
References
- Palmeri, T. J., Gauthier, I.
- Seger, C. A., Miller, E. K.
- Perceptual Learning. Fahle, M., Poggio, T. , MIT Press. (2002).
- Ashby, F. G., Maddox, W. T.
- Gauthier, I., Tarr, M. J. Becoming a "Greeble" expert: exploring mechanisms for face recognition. Vision Res. 37, 1673-1682 (1997).
- Op de Beeck, H. P., Baker, C. I., DiCarlo, J. J., Kanwisher, N. G. Discrimination training alters object representations in human extrastriate cortex. J. Neurosci. 26, 13025-13036 (2006).
- Cui, M. L., Copsey, L., Green, A. A., Bangham, J. A., Coen, E. Quantitative control of organ shape by combinatorial gene activity. PLoS Biol. 8, e1000538 (2010).
- Green, A. A., Kennaway, J. R., Hanna, A. I., Bangham, J. A., Coen, E. Genetic control of organ shape and tissue polarity. PLoS Biol. 8, e1000537 (2010).
- Hegdé, J., Bart, E., Kersten, D. Fragment-based learning of visual object categories. Curr. Biol. 18, 597-601 (2008).
- Fragment-based learning of visual categories. Bart, E., Hegdé, J., Kersten, D. Cosyne 2008 Conference, 2008 Feb 28-Mar 2, Salt Lake City, , Cosyne. Salt Lake City. 121-12 (2008).
- Ball, P. Nature's patterns : a tapestry in three parts. , Oxford University Press. (2009).
- Vuong, Q. C. Visual categorization: when categories fall to pieces. Curr. Biol. 18, 427-429 (2008).
- Kromrey, S., Maestri, M., Hauffen, K., Bart, E., Hegde, J. Fragment-based learning of visual object categories in non-human primates. PLoS One. 5, e15444 (2010).
- Brady, M. J., Kersten, D.
- Blanz, V., Vetter, T. A morphable model for the synthesis of 3D faces. SIGGAPH. 26, 187-194 (1999).
- Freedman, D. J., Riesenhuber, M., Poggio, T., Miller, E. K. Categorical representation of visual stimuli in the primate prefrontal cortex. Science. 291, 312-316 (2001).
- Lerios, A., Garfinkle, C. D., Levoy, M.
- Bronstein, A. M., Bronstein, M. M., Kimmel, R. Numerical geometry of non-rigid shapes. , Springer. (2008).
- Lotka, A. J. Natural Selection as a Physical Principle. Proc. Natl. Acad. Sci. U.S.A. 8, 151-154 (1922).
- Duda, R. O., Hart, P. E., Stork, D. G. Pattern classification. , 2nd edn, Wiley. (2001).
- Bishop, C. M. Pattern recognition and machine learning. , Springer. (2006).
- Theodoridis, S., Koutroumbas, K. Pattern recognition. , 3rd edn, Academic Press. (2006).
- Sokal, R. R. Biometry : The principles and practice of statistics in biological research. , 4th edn, W.H. Freeman and Co. (2011).
- Tuffery, S. Data mining and statistics for decision making. , Wiley. (2011).
- Crawley, M. J. Statistical Computing: An Introduction to Data Analysis using S-Plus. , Wiley. (2002).
- Venables, W. N., Ripley, B. D. Modern Applied Statistics with S. , Springer. (2003).
- Beier, T., Neely, S.
- Kent, J. R., Carlson, W. E., Parent, R. E. Shape transformation for polyhedral objects. SIGGRAPH. 26, 47-54 (1992).
- Gomes, J. Warping and morphing of graphical objects. , Morgan Kaufmann Publishers. (1999).
- Ullman, S. Object recognition and segmentation by a fragment-based hierarchy. Trends Cogn. Sci. 11, 58-64 (2007).
- Kobatake, E., Tanaka, K. Neuronal selectivities to complex object features in the ventral visual pathway of the macaque cerebral cortex. J. Neurophysiol. 71, 856-867 (1994).
- Serre, T., Wolf, L., Poggio, T. Proceedings of 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR). , IEEE Computer Society Press. (2005).
- Ullman, S., Vidal-Naquet, M., Sali, E. Visual features of intermediate complexity and their use in classification. Nat. Neurosci. 5, 682-687 (2002).
- Davis, M. J. Computer graphics. , Nova Science Publishers. (2011).
- Lengyel, E. Mathematics for 3D game programming and computer graphics, third edition. , 3rd Ed, Cengage Learning. (2011).
- Gilbert, S. F. Developmental biology. , 9th edn, Sinauer Associates. (2010).
- Gilbert, S. F., Epel, D. Ecological developmental biology : integrating epigenetics, medicine, and evolution. , Sinauer Associates. (2009).
- Hegdé, J., Thompson, S. K., Brady, M. J., Kersten, D. Object Recognition in Clutter: Cortical Responses Depend on the Type of Learning. Frontiers in Human Neuroscience. 6, 170 (2012).
- Mervis, C. B., Rosch, E.
- Futuyma, D. J. Evolution. , 2nd edn, Sinauer Associates. (2009).